基于云平臺(tái)的智能交通信息采集系統(tǒng)設(shè)計(jì)
——以軌道交通信號(hào)實(shí)驗(yàn)為例
2022-11-03 09:21:56黃瑋商林
現(xiàn)代信息科技 2022年17期
黃瑋,商林
(武漢交通職業(yè)學(xué)院,湖北 武漢 430065)
0 引 言
近幾年,隨著國(guó)家對(duì)各大城市道路建設(shè)的大力支持,在城市規(guī)模和硬件建設(shè)方面發(fā)生了明顯變化,車流量的迅速增長(zhǎng)同時(shí)也伴隨著交通事故的相繼發(fā)生,降低事故的發(fā)生便成為一大難題,緩解城市交通壓力是亟須解決的問題。為改善當(dāng)前的交通現(xiàn)狀,設(shè)計(jì)一種智能交通信息采集系統(tǒng),它不僅為交通控制方式的選擇提供可靠的信息,而且反映出路況信息,因此,基于以上我國(guó)交通的狀況,設(shè)計(jì)一種及時(shí)、高效的交通信息采集系統(tǒng)是非常有必要的。
傳統(tǒng)的交通信息采集方式有地磁感應(yīng)線圈、紅外、視頻等。其中感應(yīng)線圈是使用最為廣泛的車輛檢測(cè)裝置,這種裝置技術(shù)成熟且計(jì)數(shù)準(zhǔn)確,缺點(diǎn)是感應(yīng)線圈需要在車輛通過的道路路面下方安置,會(huì)對(duì)路面造成一定破壞,安裝成本較高。而紅外、視頻等屬于光學(xué)原理的車輛檢測(cè)器,安裝簡(jiǎn)單和維護(hù)較方便,但是光學(xué)信號(hào)容易受周圍環(huán)境和氣象的影響,檢測(cè)結(jié)果受冰霧、雨雪等天氣影響非常大。隨著信息技術(shù)和互聯(lián)網(wǎng)迅速發(fā)展,利用無(wú)線傳感器網(wǎng)絡(luò)進(jìn)行交通信息采集,既減少道路的破壞,也避免了天氣的影響,而且可以用移動(dòng)終端在線監(jiān)測(cè)。
1 系統(tǒng)結(jié)構(gòu)
本系統(tǒng)采用傳感器技術(shù)、控制技術(shù)、無(wú)線通信技術(shù),計(jì)算機(jī)技術(shù)對(duì)道路車流量信息進(jìn)行實(shí)時(shí)信息采集,整個(gè)系統(tǒng)分成四個(gè)組成部分,分別為采集節(jié)點(diǎn)、協(xié)調(diào)器、云平臺(tái)和移動(dòng)終端。結(jié)構(gòu)分為三層,即感知層、網(wǎng)絡(luò)層和應(yīng)用層。感知層主要進(jìn)行環(huán)境溫度、濕度的采集以及各個(gè)路口車流量的采集,采用的傳感器有HMC 磁傳感器、溫濕度傳感器、RFID射頻識(shí)別等,這些傳感器是獲取交通信息最重要的設(shè)備,以Wi-Fi 通信模塊(ESP8266-12f)作為網(wǎng)絡(luò)層通信設(shè)備,將感知層數(shù)據(jù)通過無(wú)線網(wǎng)絡(luò)層傳送到應(yīng)用層,應(yīng)用層基于阿里云平臺(tái),對(duì)接收的數(shù)據(jù)進(jìn)行處理,通過移動(dòng)終端能夠?qū)崟r(shí)獲取交通數(shù)據(jù),實(shí)現(xiàn)功能,系統(tǒng)結(jié)構(gòu)如圖1所示。

圖1 系統(tǒng)結(jié)構(gòu)圖
2 硬件系統(tǒng)設(shè)計(jì)
硬件系統(tǒng)分為數(shù)據(jù)采集單元和無(wú)線通信單元兩個(gè)部分,數(shù)據(jù)采集單元由STM32F103 為主控核心,將傳感器與主控核心的IO 連接,通過串口與Wi-Fi 通信模塊連接,主控核心將數(shù)據(jù)由Wi-Fi 通信模塊與協(xié)調(diào)器連接,協(xié)調(diào)器再將數(shù)據(jù)傳輸給上位機(jī)和移動(dòng)終端,可以實(shí)時(shí)獲得車流量和環(huán)境數(shù)據(jù)。
2.1 單片機(jī)
硬件系統(tǒng)的核心是STM32F103C8T6 微處理器,是一款低功耗的32 位Cortex-M3 CPU,最高工作頻率72 MHz,1.25 DMIPS/MHz,片上集成512 KB 的Flash 存儲(chǔ)器,3 個(gè)高速12 位的A/D 轉(zhuǎn)換器,多達(dá)37 個(gè)IO 口,3 組獨(dú)立的異步串行通信接口。主要負(fù)責(zé)對(duì)傳感器的數(shù)據(jù)的處理和Wi-Fi 通信模塊的控制,因?yàn)闇貪穸葌鞲衅鳌⒋抛鑲鞲衅鬏敵瞿M量電壓需要經(jīng)過轉(zhuǎn)化,然后由微處理器進(jìn)行數(shù)據(jù)的AD 處理,使用一組串口連接Wi-Fi 通信模塊,通過串口發(fā)送AT 指令進(jìn)行網(wǎng)絡(luò)配置和數(shù)據(jù)傳輸。
2.2 Wi-Fi 通信模塊
本設(shè)計(jì)的Wi-Fi 通信模塊采用安信可ESP8266-12F,該模塊在較小尺寸封裝了超低功耗32 位微型MCU,帶有16位精簡(jiǎn)模式,集成Wi-Fi MAC/BB/RF/PA/LNA 板載天線,支持標(biāo)準(zhǔn)的IEEE802.11b/g/n 協(xié)議,完整的TCP/IP 協(xié)議棧,能夠?qū)⒋跀?shù)據(jù)或者TTL 電平特征的數(shù)據(jù)轉(zhuǎn)換成無(wú)線信號(hào),實(shí)現(xiàn)信號(hào)的傳輸,Wi-Fi 通信模塊與STM32F103C8T6 微處理器通過串口RXD 和TXD 連接。Wi-Fi 通信模塊電路如圖2所示。
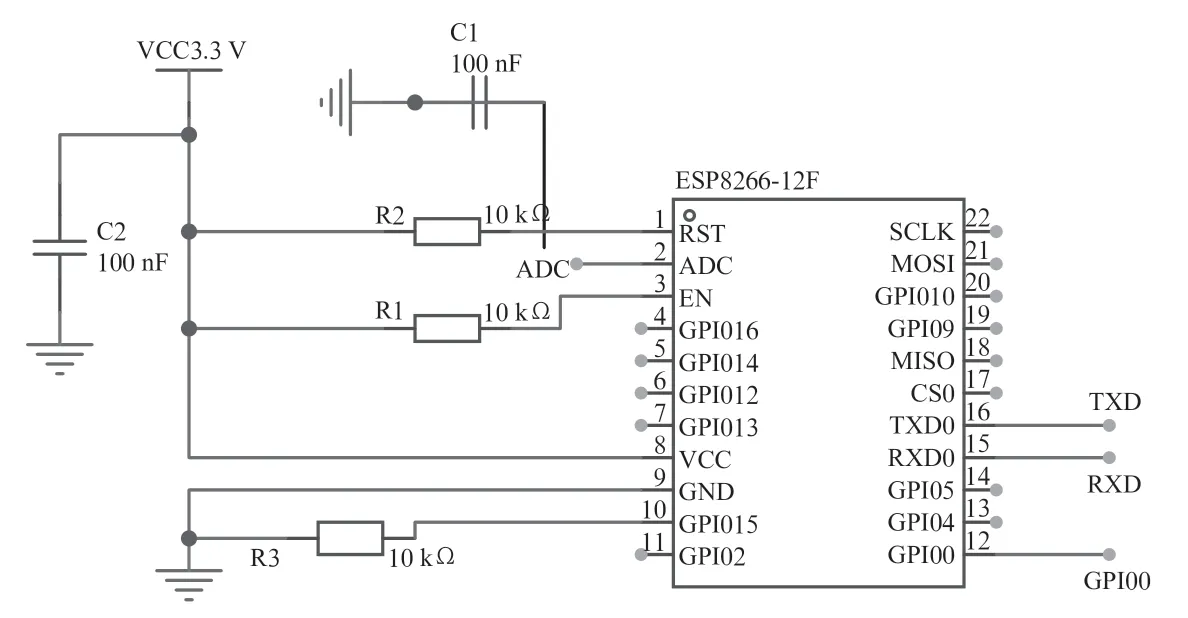
圖2 Wi-Fi 通信模塊電路
2.3 傳感器采集模塊
傳感器采集模塊包括stm32f103c8t6 微處理器和DHT11溫濕度傳感器、磁阻傳感器、復(fù)位電路、Wi-Fi 無(wú)線模塊組成,主要對(duì)當(dāng)前交通環(huán)境溫度、濕度以及各個(gè)路口車流量的采集,傳感器模塊與微處理器IO 連接,通過串口和Wi-Fi 模塊連接,模塊如圖3所示。
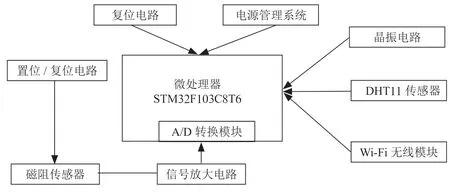
圖3 傳感器采集模塊圖
溫濕度傳感器采用DHT11 模塊,濕度測(cè)量范圍20%~95%,溫度測(cè)量范圍0 ℃~50 ℃,工作電壓3.3~5 V,具有測(cè)量準(zhǔn)確、穩(wěn)定、響應(yīng)快、功耗低的特點(diǎn),適用于長(zhǎng)期使用的環(huán)境;
車流量檢測(cè)采用磁阻傳感器,型號(hào)為霍尼韋爾HMC1512,HMC1512 工作于3 V 電壓下,帶寬為0~50 MHz,HMC1512 采用2 個(gè)磁阻橋,2 個(gè)磁阻橋在物理上相交45 度,共存于一個(gè)膜片上,車輛本身含有的鐵磁物質(zhì)會(huì)對(duì)傳感器所在區(qū)域的地磁信號(hào)產(chǎn)生影響,磁阻橋的阻值隨磁場(chǎng)強(qiáng)度變化,輸出的電壓隨之產(chǎn)生相應(yīng)的變化,當(dāng)車輛距離磁阻傳感器7 m 時(shí),引起的地磁場(chǎng)擾動(dòng)為1 mGauss 左右,相應(yīng)的電壓變化只有3 μV,需要對(duì)原始數(shù)據(jù)經(jīng)過放大后再進(jìn)行AD 轉(zhuǎn)換,經(jīng)信號(hào)分析就可以得到檢測(cè)路面的車流信息。
2.4 復(fù)位電路
當(dāng)磁阻傳感器受到大磁場(chǎng)的干擾時(shí),傳感器的輸出電壓將出現(xiàn)波動(dòng),其靈敏度將降低,無(wú)法準(zhǔn)確檢測(cè)到車輛信息,為避免干擾無(wú)法正常工作,需要將磁阻傳感器復(fù)位,將脈沖信號(hào)施加到HMC1512 芯片自帶的內(nèi)集成置位/復(fù)位電流,復(fù)位后恢復(fù)其原來(lái)的高靈敏度,復(fù)位電路如圖4所示。

圖4 通過微處理器控制的置位/復(fù)位脈沖電路
本設(shè)計(jì)中通過微處理器產(chǎn)生一個(gè)大于4 A 不小于2 μs的強(qiáng)脈沖信號(hào)使磁阻傳感器置位/復(fù)位。微處理器通過定時(shí)器模塊輸出一個(gè)100 ms 的高電平的控制信號(hào)給IRF7106 MOS 管,控制MOS 管的導(dǎo)通和截止,產(chǎn)生一個(gè)先開后合的開關(guān)接點(diǎn),采用5 V-20 V 電壓轉(zhuǎn)換器,從4.7 μF 電容處輸出電流脈沖信號(hào),使磁阻傳感器置位/復(fù)位后恢復(fù)到高靈敏度。
2.5 協(xié)調(diào)器
協(xié)調(diào)器節(jié)點(diǎn)是整個(gè)無(wú)線網(wǎng)絡(luò)的核心,是基于ARM Cortex-M4 核心的通信網(wǎng)關(guān),用以管理無(wú)線傳感器模塊,并將傳感器模塊的數(shù)據(jù)轉(zhuǎn)換后進(jìn)行TCP 網(wǎng)絡(luò)通信,實(shí)現(xiàn)數(shù)據(jù)的上傳,是整個(gè)無(wú)線傳感網(wǎng)絡(luò)的中心節(jié)點(diǎn),每個(gè)無(wú)線傳感器模塊的數(shù)據(jù)都采用帶地址碼的數(shù)據(jù)幀,協(xié)調(diào)器根據(jù)接收到的數(shù)據(jù)的地址碼判斷是哪個(gè)車道檢測(cè)點(diǎn)發(fā)送的數(shù)據(jù),這些工作通過上層協(xié)議來(lái)完成,可保證數(shù)據(jù)的正常傳輸,避免丟幀的現(xiàn)象發(fā)生。協(xié)調(diào)器如圖5所示。

圖5 協(xié)調(diào)器模塊圖
3 系統(tǒng)的軟件設(shè)計(jì)
系統(tǒng)軟件設(shè)計(jì)主要完成對(duì)傳感器采集程序、Wi-Fi 通信模塊程序、復(fù)位電路定時(shí)器,上位機(jī)程序設(shè)計(jì)和移動(dòng)終端程序設(shè)計(jì)。
3.1 傳感器采集模塊程序開發(fā)
傳感器采集模塊程序設(shè)計(jì)包括傳感器初始化、AD 數(shù)據(jù)處理、Wi-Fi 通信模塊初始化和聯(lián)網(wǎng),數(shù)據(jù)發(fā)送等。系統(tǒng)上電后首先進(jìn)行初始化,采集傳感器數(shù)據(jù),數(shù)據(jù)處理后通過串口將數(shù)據(jù)發(fā)送到Wi-Fi 通信模塊,將數(shù)據(jù)通過無(wú)線路由器傳輸?shù)絽f(xié)調(diào)器,系統(tǒng)每隔5 s 重復(fù)以上操作。傳感器采集模塊程序設(shè)計(jì)流程如圖6所示。
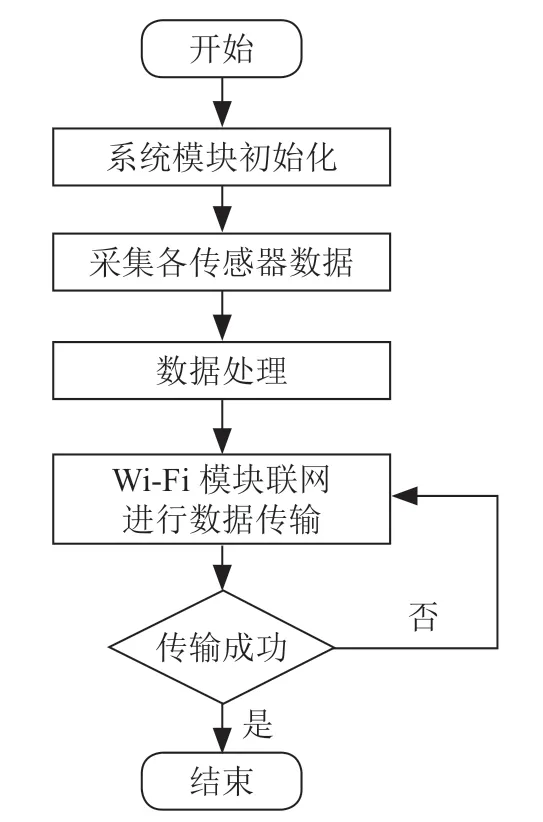
圖6 傳感器采集模塊程序流程圖
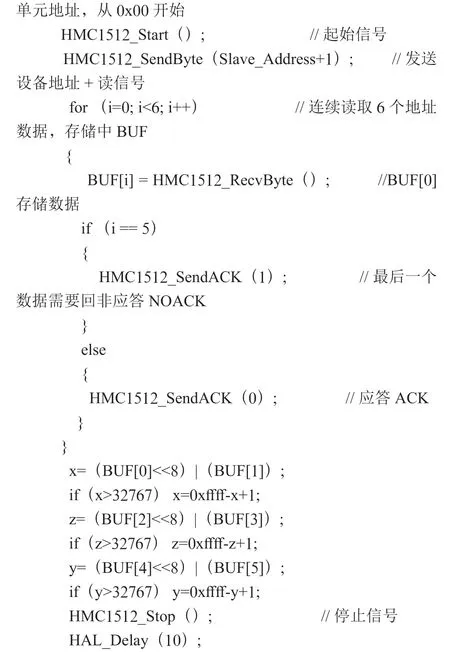
磁阻傳感器數(shù)據(jù)采集代碼:

3.2 云平臺(tái)服務(wù)器
采用阿里云物聯(lián)網(wǎng)平臺(tái)搭建云端方案,阿里云物聯(lián)網(wǎng)平臺(tái)提供了設(shè)備接入的環(huán)境,保證了數(shù)據(jù)的安全可靠的通信能力,同時(shí)云端可將數(shù)據(jù)下發(fā)到移動(dòng)控制終端。此外,阿里云也提供了云數(shù)據(jù)庫(kù)存儲(chǔ)功能,當(dāng)云平臺(tái)服務(wù)器接收到傳感器采集模塊上傳的數(shù)據(jù)后,上位機(jī)服務(wù)器通過云平臺(tái)數(shù)據(jù)實(shí)時(shí)流轉(zhuǎn)功能進(jìn)行數(shù)據(jù)的業(yè)務(wù)處理并將數(shù)據(jù)存儲(chǔ),通過API 將數(shù)據(jù)下發(fā)到移動(dòng)終端APP,云平臺(tái)功能如圖7所示。
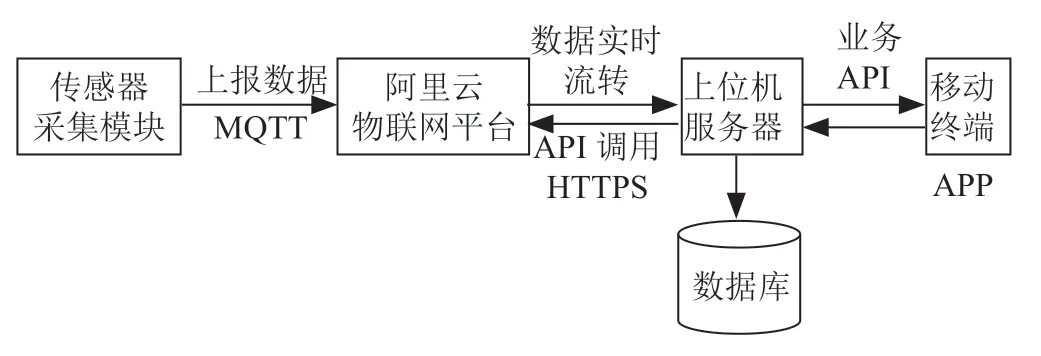
圖7 云平臺(tái)功能結(jié)構(gòu)圖
4 系統(tǒng)測(cè)試
本系統(tǒng)在天氣晴朗的環(huán)境下在一條雙向車道道路進(jìn)行測(cè)試,采集終端監(jiān)測(cè)兩個(gè)車道,通過無(wú)線通信將車流量數(shù)據(jù)傳送到協(xié)調(diào)器,協(xié)調(diào)器通過有線網(wǎng)絡(luò)將數(shù)據(jù)上傳到云服務(wù)器。每隔5 s 進(jìn)行1 次測(cè)量,通過系統(tǒng)測(cè)量值與人員現(xiàn)場(chǎng)觀測(cè)值進(jìn)行對(duì)比,對(duì)系統(tǒng)的測(cè)量精度進(jìn)行檢驗(yàn),測(cè)試數(shù)據(jù)如表1所示。
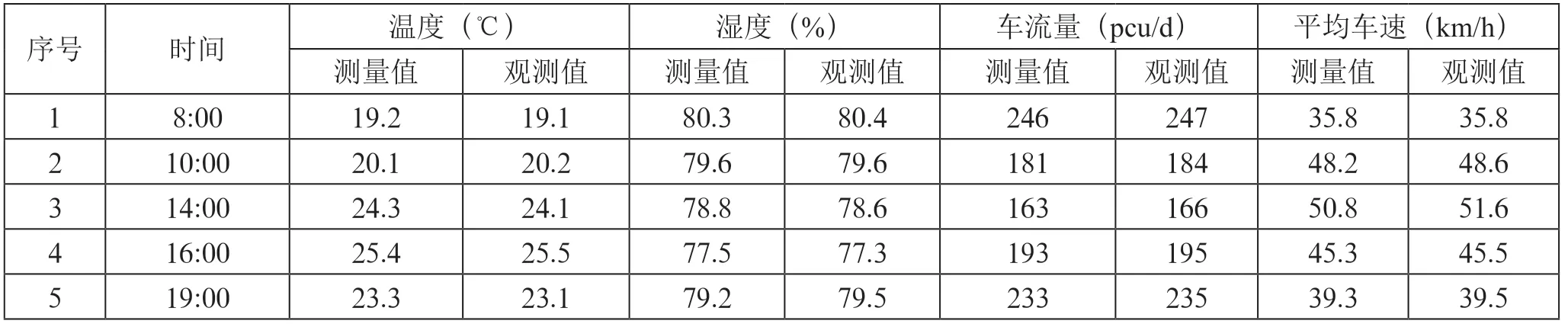
表1 交通信息采集數(shù)據(jù)對(duì)比表
通過表1可知,在天氣晴朗的5 個(gè)時(shí)間點(diǎn)進(jìn)行測(cè)量,溫濕度相對(duì)誤差最大0.3%,車流量相對(duì)最大誤差1.8%,車速測(cè)量相對(duì)誤差最大為1.5%,本系統(tǒng)的測(cè)量滿足實(shí)驗(yàn)精度要求。為獲得較為準(zhǔn)確的實(shí)驗(yàn)數(shù)據(jù),分別在3 個(gè)不同的路口進(jìn)行測(cè)試,實(shí)驗(yàn)對(duì)采集的數(shù)據(jù)進(jìn)行濾波處理和車輛檢測(cè)結(jié)果統(tǒng)計(jì),如表2所示,提供給數(shù)據(jù)可以得出:本采集系統(tǒng)的車輛檢測(cè)正確率可達(dá)到96%以上,可以保證很好的檢測(cè)精度,誤差產(chǎn)生的原因可能是磁阻傳感器受到外部磁場(chǎng)的干擾,或者無(wú)線模塊信號(hào)受到干擾所致。
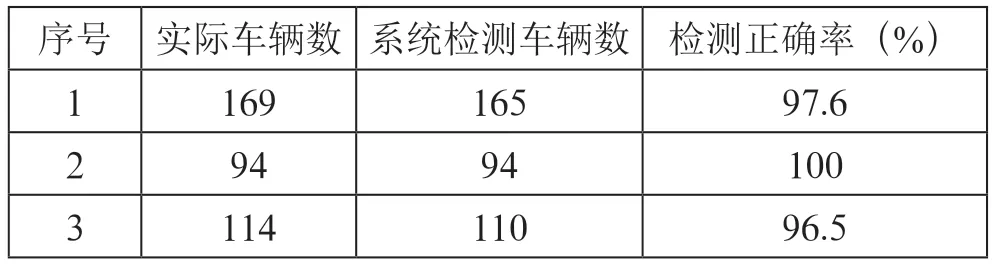
表2 車輛檢測(cè)結(jié)果
5 結(jié) 論
針對(duì)城市交通擁堵的弊端,對(duì)傳統(tǒng)交通信息采集方式存在的問題進(jìn)行分析,在物聯(lián)網(wǎng)相關(guān)技術(shù)的基礎(chǔ)上,設(shè)計(jì)并實(shí)現(xiàn)了一種基于云平臺(tái)的智能交通信息采集系統(tǒng),可通過傳感器對(duì)城市道路車流量進(jìn)行檢測(cè),各終端通過云平臺(tái)能夠?qū)崟r(shí)準(zhǔn)確地獲取車道交通信息的數(shù)據(jù)。系統(tǒng)可在現(xiàn)有道路上進(jìn)行無(wú)損安裝,成本低廉,穩(wěn)定可靠,所有監(jiān)控信息上,能實(shí)現(xiàn)隨時(shí)隨地獲取多個(gè)路口的監(jiān)控狀態(tài),自動(dòng)生成統(tǒng)計(jì)報(bào)表,提高管理工作的效率。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32

- 現(xiàn)代信息科技的其它文章
- 虛擬仿真實(shí)驗(yàn)在空調(diào)自控系統(tǒng)實(shí)驗(yàn)教學(xué)中的應(yīng)用
- 虛擬現(xiàn)實(shí)技術(shù)實(shí)訓(xùn)平臺(tái)的設(shè)計(jì)開發(fā)與教學(xué)實(shí)踐研究
- 創(chuàng)新創(chuàng)業(yè)背景下的電路分析基礎(chǔ)課程教學(xué)方法研究
- 基于教學(xué)云平臺(tái)的網(wǎng)絡(luò)工程專業(yè)實(shí)踐教學(xué)改革的研究
——以“網(wǎng)絡(luò)安全技術(shù)”課程為例 - “互聯(lián)網(wǎng)+”背景下CDIO教學(xué)模式研究
——以高職機(jī)電類學(xué)生綜合職業(yè)能力培養(yǎng)為例 - 基于C52單片機(jī)及物聯(lián)網(wǎng)技術(shù)的臨時(shí)鎖存行李箱工具研究