基于偏振成像的快速去霧算法
2022-11-03 09:22:32馮曉峰徐圣奇劉杰
現代信息科技 2022年17期
馮曉峰,徐圣奇,劉杰
(中國電子科技集團公司第二十七研究所,河南 鄭州 450047)
0 引 言
在霧、霾、雨、雪、以及水下等強散射環境下,光電探測成像的質量嚴重退化,從而造成無法對目標進行有效的探測、識別、和跟蹤。因此,從霧天退化圖像中復原和增強景物細節信息具有重要的現實意義。目前,已有的圖像去霧技術可大致分為兩大類:一類是基于大氣散射物理模型;另一類是基于圖像增強的方法。其中,基于物理模型的圖像去霧方法從圖像退化機理出發,基于大氣散射理論建立霧霾圖像的退化模型,充分利用圖像退化的先驗知識,因此一般能夠達到較為理想的去霧效果,是目前圖像去霧技術研究的重點。
Tan 等人設計了一種基于先驗條件的高效去霧方法,該方法基于無霧區域的對比度高于有霧區域,并且場景衰減是距離的連續平滑函數等假設,利用馬爾科夫隨機場對大氣光進行估計,最終根據大氣散射模型恢復出無霧圖像。Tarel等人提出的基于大氣耗散函數的去霧方法,其假設大氣面紗函數僅在局部區域上發生改變,并利用中值濾波的方法對透射率函數進行了估計。He 等人在統計分析了大量的圖像的基礎上,發現了圖像中暗通道的存在,提出基于暗原色先驗的去霧方法,打破了傳統的去霧理念,已經成為該領域公認的單幅圖像去霧最為經典的方法之一。Mei 等人提出一種能夠很好地保護圖像邊緣細節且耗時較短的自適應指數加權移動平均濾波算法,并與改進的暗通道結合,實現快速去霧。Jin 等人針對暗通道算法在對天空區域去霧存在失真的問題,提出一種基于引導濾波和自適應容差機制的圖像去霧算法。Chen 等人針對現有的單幅圖像去霧問題,提出了一種基于并聯卷積神經網絡的單幅圖像去霧算法,以端對端的方式實現圖像去霧。Feng 等人為充分挖掘和利用透射率估計及圖像去霧過程中捕獲信息的相關性,提出了雙視覺注意網絡的聯合圖像去霧和透射率估計算法。
Schechner 等人首次將光的偏振理論引入到大氣氣溶膠散下的成像清晰化研究中來,提出了經典的偏振差分去霧方法。該算法計算復雜度低,具有即時去霧能力,但需要通過手工選取圖像中的區域來估計相關參數。Dai 等人提出了一種全局參數自動估計的彩色圖像偏振去霧方法,利用不同角度的3 幅偏振圖像,自動估算無窮遠處的大氣光和大氣光的偏振度。Xia 等人提出一種基于偏振特性的圖像去霧方法,該方法結合暗原色先驗原理估計大氣光強及場景深度信息,再利用景深信息對偏振度值進行求解,最終復原得到場景的輻射強度信息。
雖然上述方法都能夠取得一定的去霧效果,但大部分算法都存在計算復雜度較高或需要人工參與的問題,完成去霧操作所需的時間較長,無法滿足實時監測或偵察的需求。為此,本文提出了一種基于偏振成像的快速去霧算法。
1 霧天成像模型與偏振成像系統
1.1 霧天成像模型
根據如圖1所示的大氣散射模型,在霧天環境下成像探測器得到的總光強I 將包含兩部分一部分是景物輻射和反射光強在經過大氣衰減之后到達成像系統接收面的光強,另一部分是太陽光經過空氣中微粒散射后到達成像系統的雜散光,如式(1)所示:

圖1 霧天成像模型示意圖

其中,(,)=(,)∈[0,1]為透射率,表示大氣對光的衰減系數,(,)表示景物到成像面的距離,(,)表示景物本身的輻射和反射光強值,表示無窮遠處大氣光強。
由公式(1)可知,只需要通過估計獲取透射率(,)和無窮遠處大氣光強,即可根據下式解算得到最終無霧清晰的場景圖像。

通過在強度成像系統前增加線偏振片的方式,可以獲取目標場景在特定偏振角度下的偏振成像結果。旋轉線偏振片至0°、60°、120°,分別獲取對應的三個通道的偏振圖像、、。但這種通過旋轉偏振片來獲取三個偏振通道圖像的方式,只適用于靜態成像,無法對動態場景進行成像。接下來,將介紹一下本文所使用的分振幅偏振成像系統。
1.2 分振幅偏振成像系統
分振幅偏振成像系統的核心光電轉換單元主要包括組合棱鏡、線性偏振片和焦平面探測器三部分,如圖2所示。組合棱鏡由三塊棱鏡組成,其材質為K9 玻璃,內部包含兩個分光面,均獨有寬帶分束膜,可以將入射到光電轉換單元中的光束分為強度、譜段和偏振態基本一致的三部分。
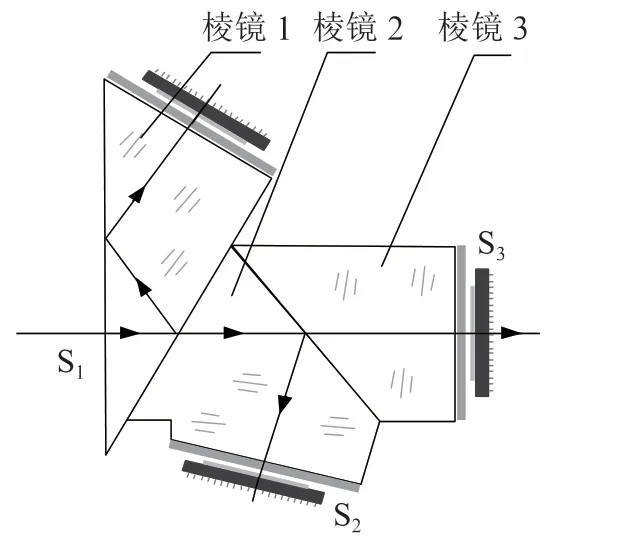
圖2 分振幅偏振成像系統示意圖
其中,第一層分光膜層的透反比為2:1,第二層分光膜層的透反比為1:1,入射光從S面入射,經過兩次分光后,從S,S,S面出射,組合棱鏡的入射面鍍有減反射膜,在工作波段的反射系數≤0.5%。S,S,S三個出射面后端與焦平面傳感器之間均安裝有線性偏振片,線性偏振片與組合棱鏡膠合在一起,三個偏振片的方位角分別為0°、60°、120°。
三個焦平面探測器為黑白傳感器,分別位于線性偏振片的后端,通過精密的裝調系統實現初始配準,傳感器的響應一致性、線性偏振片的偏振方向以及傳感器之間更高精度的像素級配準主要通過系統標定來實現。
利用分振幅偏振成像系統可以實現一次成像同時獲取0°、60°、120°三個偏振方向的偏振圖像、、,然后根據如下公式即可計算得到相應的強度圖像I、偏振度圖像DoP。

2 基于偏振探測成像的快速去霧算法
2.1 透射率t(x,y)估算
對式(1)進行變形,可得以下等式:

接著,本文仿照暗通道方法做出第一條假設:假定在每個偏振通道上,透射率(,)均保持一致。此時,對上式左右分別取偏振通道最小值,則有:



接下來,做出第二條假設:假設在以坐標(,)為中心的一個較小鄰域范圍(,)內,對于?(,l)∈(,)都有(,l)=(,)成立。此時,對式(5)的左右兩邊分別在(,)內取平均,則有




如果當前像素領域范圍內的目標景物亮度偏高,則平均亮度將不再接近于0,第三條假設將不成立,此時利用式(8)計算得到的(,)的數值將偏小,為了獲取更為準確的數值,需要對上式進行修正。為此,為上式引入一個修正因子(,)∈[0,1]。
在假設條件三不成立的區域,利用式(8)所得的(,)的數值偏小。在給定(,)的前提下,這會造成利用(,)解算得到的目標場景(,)在對應區域的數值相比于真實值而言會偏高。此時,對(,)的鄰域取均值,如果其數值仍然較大,則意味著該區域假設條件不成立的可能性就越大。此時,應當將對應區域的修正因子(,)取一個小于1 的數值,從而對(,)進行修改正。根據如上分析,可以簡單的令:

結合式(6),最終可得:

相比于暗通道方法,本文在透射率(,)的估算過程中,使用的是均值濾波,而不是最小值濾波,此外還省去了利用導向濾波對透射率進行細化的過程,從而可以極大地縮短了估算透射率所消耗的時間,提高了運行效率。
2.2 無窮遠處大氣光強A∞的估算


式中,為亮度閾值。根據上式,可以估計出無窮遠處大氣光強度為:

3 實驗結果
為驗證本文方法的可行性和有效性,利用在霧天條件下獲取的多組場景偏振圖像進行了去霧效果測試,下面給出測試實驗結果。
本文所提的快速去霧算法,其與偏振暗通道方法的核心差異在于對透射率的估計過程不同。圖3給出了某個場景下兩種方法所得到的透射率圖的對比結果。從結果中可以看出,本文方法通過合理假設,在有效降低運算量的前提下,可以獲得與偏振暗通道方法相似的透射率估計結果。

圖3 偏振暗通道和偏振快速去霧方法得到的透射率圖對比結果
圖4給出了不同方法的去霧效果對比結果,其中圖像增強方法采取的是常規的直方圖均衡、均值濾波、伽瑪增強三種方法的組合,偏振暗通道方法和本文所提偏振快速去霧方法在自身去霧的基礎上,也增加了圖像增強處理。從對比結果中可以看出,圖像增強方法具備一定的去霧效果,但去霧圖像整體仍呈現霧蒙蒙的視覺效果;偏振暗通道方法的去霧結果的可視性更好,在原圖像中被霧霾淹沒的高樓,經過去霧處理后得到凸顯,而且圖像的整體對比度和清晰度都得到了提升,而本文所提方法取得了與偏振暗通道方法類似的去霧效果。

圖4 不同方法的去霧效果對比
為了更為直觀地對比不同方法的去霧性能,表1給出了原圖像以及不同去霧方法的客觀性能指標結果。從對比結果中可以看出,與直觀的視覺效果對比結果類似,圖像增強方法所得結果相比于原圖像,各項指標均有所提升;而偏振暗通道去霧方法所得結果的各項指標也明顯優于圖像增強方法,而本文所提方法的各項指標與偏振暗通道去霧方法接近,甚至還稍微還好于偏振暗通道方法。從處理時間上來看,圖像增強算法速度最快,其次是本文所提方法,與圖像增強算法接近,而偏振暗通道去霧方法所需的處理時間最長。綜上可得,本文所提方法可以在更短的處理時間內,得到與偏振暗通道去霧方法相似的處理結果,具備更好的實用性。

表1 不同方法去霧結果的客觀指標對比
為了進一步驗證所提方法對于不同場景的適應性,圖5給出了多個場景下去霧效果的對比結果,其中第一行為有霧圖像,第二行為利用本文方法所得的去霧后結果。從結果中可以看出,在不同的場景下,本文所提方法都能取得一個較好的去霧效果。

圖5 本文方法在多個場景下的去霧結果
4 結 論
針對現有去霧算法執行效率較低,無法滿足實時去霧監測與偵察的需求,本文提出了一種基于偏振成像的快速去霧算法,在基于大氣光物理傳輸模型的基礎上,通過三條合理假設,實現了對透射率函數的快速估計,在保證去霧效果的同時降低了算法整體運算復雜度。試驗結果表明,利用本文算法,能夠在更短的處理時間內取得與暗通道方法相似的去霧效果,可以廣泛應用于實時去霧監測與偵察領域。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
空間科學學報(2021年4期)2021-08-30 08:31:18
兒童故事畫報(2019年5期)2019-05-26 14:26:14
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
世界知識畫報·藝術視界(2010年9期)2010-12-31 00:00:00
