基于改進(jìn)LuGre 摩擦模型的機(jī)器人關(guān)節(jié)模糊自適應(yīng)反步控制
2022-11-03 06:10:58李俊陽(yáng)趙琛夏雨甘來(lái)
湖南大學(xué)學(xué)報(bào)(自然科學(xué)版) 2022年10期
關(guān)鍵詞:模型
李俊陽(yáng),趙琛,夏雨,甘來(lái)
(1.重慶大學(xué)機(jī)械傳動(dòng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,重慶 400044;2.重慶大學(xué)機(jī)械與運(yùn)載工程學(xué)院,重慶 400044)
諧波減速器作為機(jī)器人柔性關(guān)節(jié)主要零部件[1-2],具有小體積、大扭矩等特點(diǎn)[3],但是由于諧波減速器傳動(dòng)時(shí)波發(fā)生器與柔輪內(nèi)壁、柔輪齒與剛輪齒存在復(fù)雜的滑動(dòng)摩擦接觸,導(dǎo)致整個(gè)減速器不同的工況環(huán)境條件下存在較強(qiáng)的非線性摩擦,且對(duì)外界未知干擾力矩敏感.因此,研究諧波傳動(dòng)系統(tǒng)的動(dòng)力學(xué)特性,并提出有效的控制策略以實(shí)現(xiàn)對(duì)非線性摩擦以及外界未知干擾力矩的高精度補(bǔ)償,具有十分重要的理論研究意義和工程應(yīng)用價(jià)值[4].
LuGre 摩擦模型[5]能精確地描述摩擦的各種動(dòng)靜態(tài)特性,如黏滑運(yùn)動(dòng)、預(yù)位移等,因此在基于模型的摩擦補(bǔ)償中得到了廣泛應(yīng)用.黨選舉等[6]基于Lu-Gre 摩擦模型對(duì)液壓系統(tǒng)進(jìn)行摩擦補(bǔ)償;羅陽(yáng)等[7]基于諧波齒輪傳動(dòng)的非線性特性,提出了一種基于記憶特性遲滯剛度和LuGre 動(dòng)態(tài)摩擦的諧波齒輪傳動(dòng)動(dòng)力學(xué)模型,但如何準(zhǔn)確辨識(shí)LuGre 模型參數(shù)仍是難點(diǎn);Huang 等[8]提出了基于LuGre 模型的機(jī)電伺服系統(tǒng)摩擦自適應(yīng)補(bǔ)償方法,證明其所提出的自適應(yīng)補(bǔ)償方法能很好地估計(jì)或減少摩擦和間隙的不利影響,提高了跟蹤效果;Yue 等[9]基于光電跟蹤系統(tǒng)提出了一種改進(jìn)的LuGre 模型,并利用遺傳算法對(duì)摩擦模型的動(dòng)靜態(tài)參數(shù)進(jìn)行辨識(shí),需辨識(shí)的參數(shù)數(shù)目龐大且對(duì)理論要求高.綜上,LuGre 模型雖得到廣泛應(yīng)用,但模型參數(shù)會(huì)隨著外界條件的變化而變化,因此,如何更加準(zhǔn)確地描述LuGre 模型,又如何對(duì)變換的參數(shù)進(jìn)行摩擦補(bǔ)償,成為研究的焦點(diǎn).
反步控制是非線性控制中的一種重要方法[10],其與神經(jīng)網(wǎng)絡(luò)、模糊邏輯、命令濾波器的結(jié)合是目前研究的熱點(diǎn)[11-14].王冬冬等[15]在經(jīng)典反步控制基礎(chǔ)上,采用有限時(shí)間命令濾波,并設(shè)計(jì)了誤差補(bǔ)償,最終保證了柔性關(guān)節(jié)閉環(huán)系統(tǒng)有限時(shí)間收斂;Sun等[16]基于徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)的特性,將反步控制的應(yīng)用范圍擴(kuò)大到更一般的隨機(jī)非線性系統(tǒng),保證了所有閉環(huán)信號(hào)有界,跟蹤誤差收斂在一個(gè)足夠小的領(lǐng)域內(nèi);李曉光等[17]采用最小二乘算法辨識(shí)了模型參數(shù),并將反步控制與滑模控制相結(jié)合,設(shè)計(jì)了自適應(yīng)滑模反步控制器,并與傳統(tǒng)PID[18-20]控制進(jìn)行比較,提高了其動(dòng)態(tài)響應(yīng)速度,跟蹤精度高,抗干擾能力強(qiáng).
針對(duì)機(jī)器人柔性關(guān)節(jié)諧波驅(qū)動(dòng)系統(tǒng),考慮溫度、載荷等工況對(duì)傳動(dòng)界面摩擦的影響,通過(guò)引入改進(jìn)參數(shù)φ和ξ自適應(yīng)分別對(duì)LuGre 摩擦模型中的靜態(tài)摩擦參數(shù)和動(dòng)態(tài)摩擦參數(shù)進(jìn)行補(bǔ)償,采用模糊神經(jīng)網(wǎng)絡(luò)自適應(yīng)逼近外界干擾力矩對(duì)諧波驅(qū)動(dòng)系統(tǒng)的影響,引入正切障礙Lyapunov 函數(shù)對(duì)輸出信號(hào)進(jìn)行約束,使得位置跟蹤誤差被限制在給定范圍之內(nèi),并利用雙曲正弦函數(shù)跟蹤微分器解決虛擬輸入微分引起的“微分爆炸”和一階濾波器精度差問(wèn)題,最終提出了基于改進(jìn)的LuGre 摩擦模型的機(jī)器人關(guān)節(jié)模糊自適應(yīng)反步控制策略.
1 動(dòng)力學(xué)模型
1.1 系統(tǒng)動(dòng)力學(xué)模型
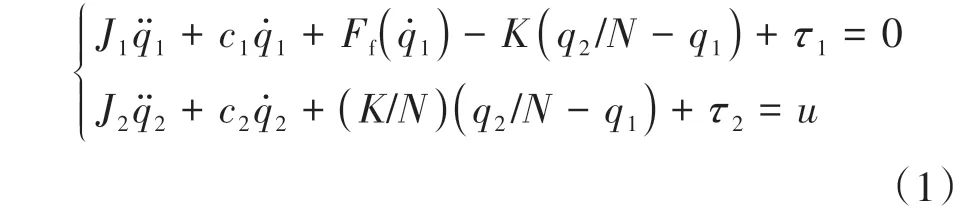
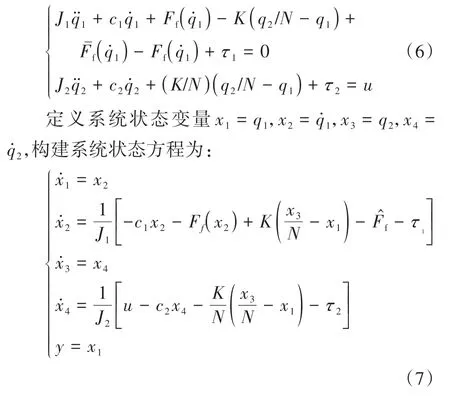
機(jī)器人關(guān)節(jié)在工作中存在著柔性變形、非線性摩擦和外界未知干擾等因素,綜合考慮存在因素的影響,建立柔性濾波驅(qū)動(dòng)機(jī)構(gòu)的動(dòng)力學(xué)模型[21]:
1.2 LuGre摩擦模型的改進(jìn)
式(1)中的非線性摩擦力Ff由LuGre 摩擦模型定義為[22]:
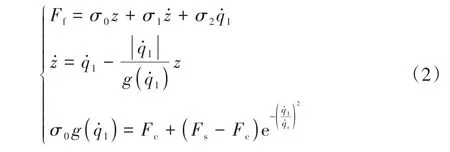
式中:z為鬃毛的平均變形量;g(˙)為不同摩擦影響;σ0為鬃毛剛度系數(shù);σ1為鬃毛阻尼系數(shù);σ2為黏性摩擦系數(shù);Fc為庫(kù)倫摩擦力矩;Fs為靜摩擦力矩為Stribeck速度.
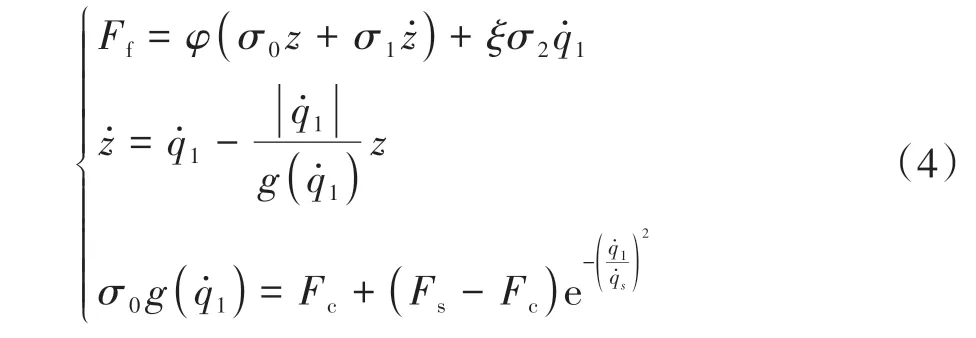
在LuGre 摩擦模型中,系數(shù)σ0、σ1、σ2都是恒定常數(shù).而在實(shí)際工況中,系數(shù)σ0與σ1分別表示傳動(dòng)界面處于混合潤(rùn)滑狀態(tài)時(shí)鬃毛接觸剛度與相對(duì)滑動(dòng)時(shí)的阻尼系數(shù),隨著微凸體接觸與油膜承擔(dān)載荷的比例改變而變化;σ2為油膜的黏性摩擦系數(shù),相對(duì)運(yùn)動(dòng)速度增大彈性流體動(dòng)壓效應(yīng)的增加,以及溫度變化引起的潤(rùn)滑劑黏度改變,都將影響油膜的黏性摩擦系數(shù).因此,為了更準(zhǔn)確地反映減速器內(nèi)部摩擦隨外界工況環(huán)境條件的變化,分別引入?yún)?shù)φ和ξ對(duì)LuGre摩擦模型進(jìn)行改進(jìn),具體如下:

式中:φ用來(lái)反應(yīng)鬃毛平均變形量的變化;ξ用來(lái)反應(yīng)黏性摩擦系數(shù)的變化,且0 <φmin<φ<φmax和0 <ξmin<ξ<ξmax.
將式(3)代入式(2)得:
式(4)中的參數(shù)均會(huì)隨著外界溫度、潤(rùn)滑條件等因素的影響發(fā)生變化,因此假設(shè)實(shí)際的LuGre 摩擦模型可表示為:
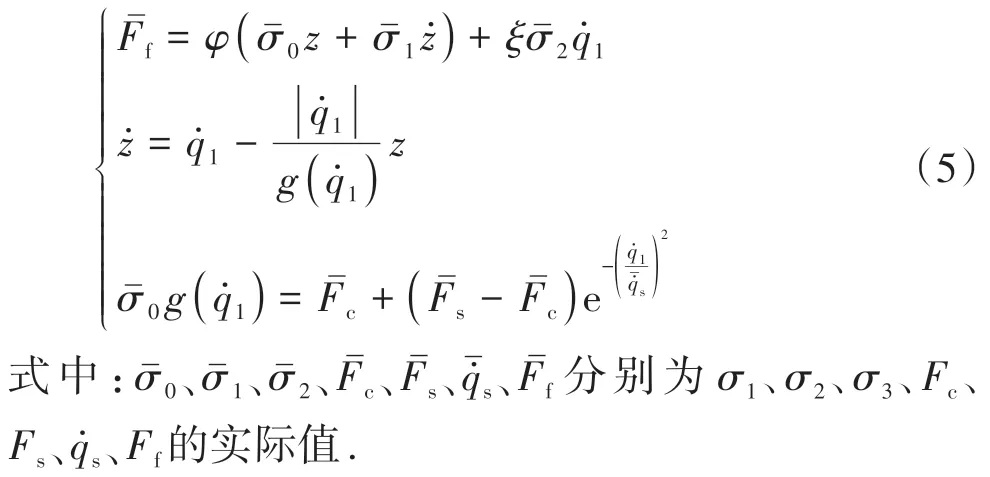
由于參數(shù)的實(shí)際值很難獲得,將其名義值表示實(shí)際模型,式(1)改寫(xiě)為:
2 模糊自適應(yīng)積分反步控制
2.1 模糊邏輯系統(tǒng)
為了補(bǔ)償外界未知干擾力矩,采用單點(diǎn)模糊化、乘積推理和中心去模糊化推導(dǎo)出模糊規(guī)則[23-25],輸出的模糊系統(tǒng)可表示為:
式中:θj為模糊隸屬函數(shù)μBj(θj)達(dá)到最大值的點(diǎn),進(jìn)一步假設(shè)μBj(θj)=1.
則式(8)可以表示為:

如果所有參數(shù)都取高斯函數(shù),那么下面的引理成立.
引理[23]:設(shè)f(x)是定義在集合Ω上的連續(xù)函數(shù),則存在一個(gè)如式(11)所示的模糊邏輯系統(tǒng),使得:

式中:δ(x)為逼近誤差且滿足|δ(x)|<ε.
假設(shè)存在一個(gè)光滑有界函數(shù)ρi(·),滿足0 <|εi+Di+1|≤ρi,i=1,2,3.
2.2 正切障礙函數(shù)
為了保證輸出狀態(tài)被約束在期望的區(qū)域內(nèi),本文使用正切障礙函數(shù)ytan(y).正切障礙函數(shù)具有以下特點(diǎn)[25]:

在進(jìn)行Lyapunov 分析時(shí),正切障礙函數(shù)ytan(y)滿足:當(dāng)y→-π/2或y→π/2時(shí),ytan(y) →∞.
2.3 雙曲正弦函數(shù)跟蹤微分器
為了避免控制器設(shè)計(jì)中的“微分爆炸”,引入了基于雙曲正弦函數(shù)的跟蹤微分器,表示為[26]:
式中:α(t)表示輸入信號(hào);v1(t)、v2(t)表示跟蹤微分器的狀態(tài)變量;R、l1、l2、λ1、λ2均為大于0 的設(shè)計(jì)參數(shù).對(duì)于合適的設(shè)計(jì)參數(shù)R、l1、l2、λ1、λ2,當(dāng)輸入信號(hào)α(t)通過(guò)微分器時(shí),如果有v1(t) -α(t) ≤κ且κ>0,那么存在正常數(shù)lv2使得:

2.4 模糊自適應(yīng)反步控制器設(shè)計(jì)
第1步:給定連續(xù)可導(dǎo)的位移參考信號(hào)x1d,則有誤差變量e1=x1-x1d,對(duì)e1求導(dǎo).

定義第1個(gè)正切障礙Lyapunov函數(shù)[20]:

其中滿足e1∈(-r1,r1),r1表示設(shè)計(jì)參數(shù).
對(duì)V1求導(dǎo):
為便于控制器設(shè)計(jì),假定x1d=α1,x4d=α4,即αi,i=1,2,3,4通過(guò)雙曲正弦跟蹤微分器[21]得到˙:
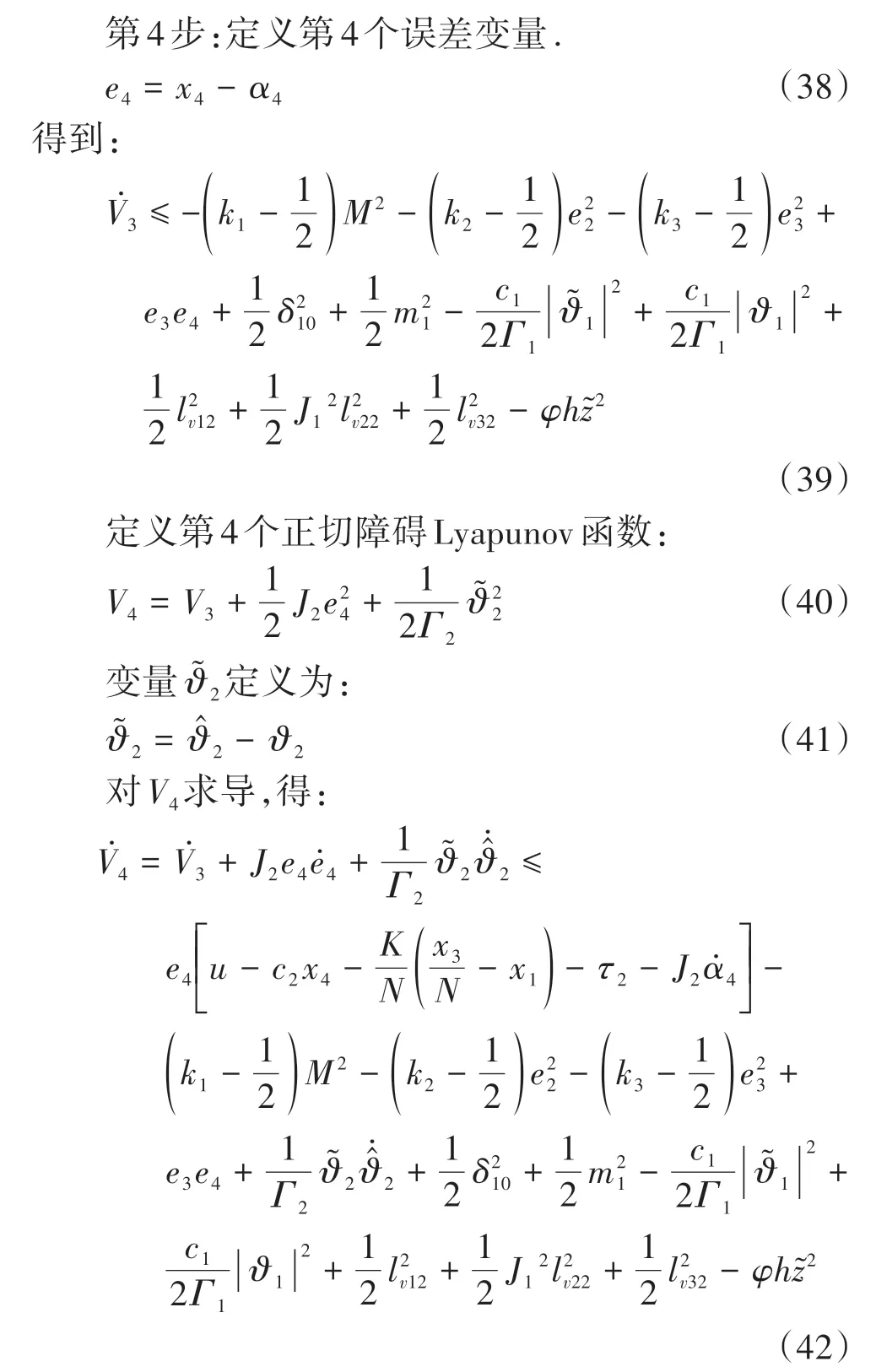
第2步:定義第2個(gè)誤差變量.

將式(20)代入式(19),得

定義第2個(gè)正切障礙Lyapunov函數(shù):

對(duì)于外界位置干擾力矩τ1,根據(jù)式(11)使用模糊神經(jīng)網(wǎng)絡(luò)[23-25]進(jìn)行逼近,得

由于鬃毛的平均變形量z不能直接測(cè)量,因此,使用一個(gè)非線性狀態(tài)觀測(cè)器來(lái)估計(jì)z的大小,即
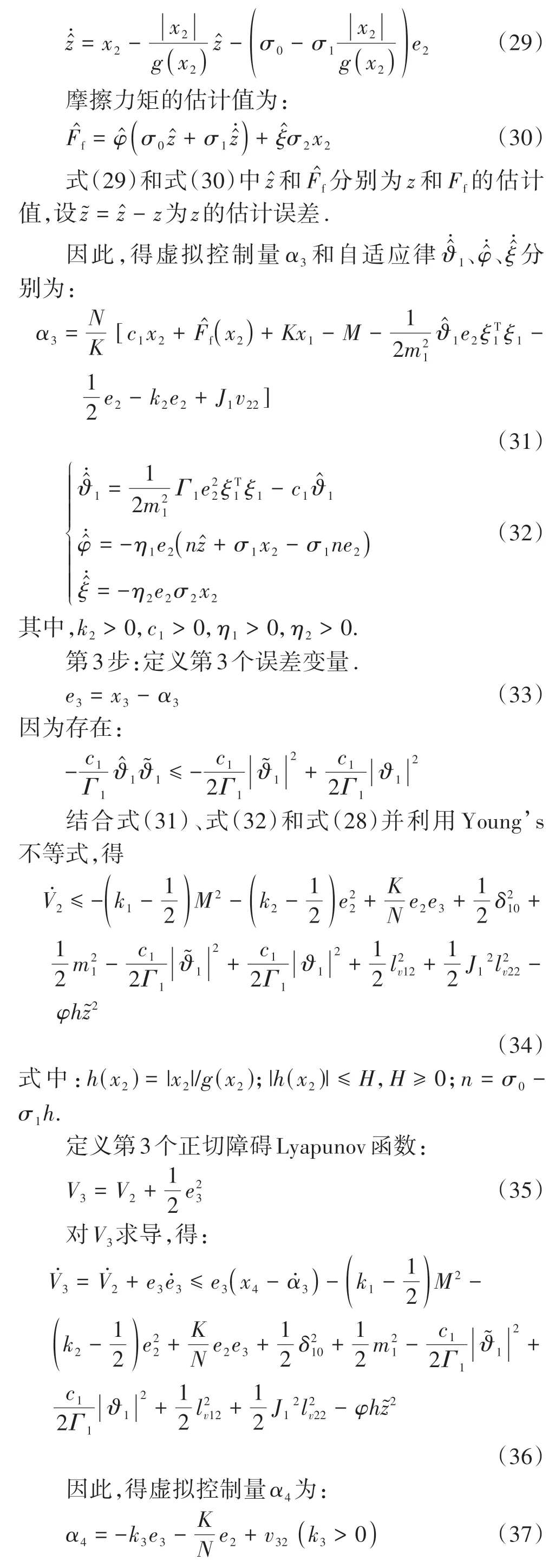
對(duì)于外界位置干擾力矩τ2,根據(jù)式(11)使用模糊神經(jīng)網(wǎng)絡(luò)[23-25]進(jìn)行逼近,得


3 穩(wěn)定性分析
對(duì)于任意給定的常數(shù)p,定義緊集為:
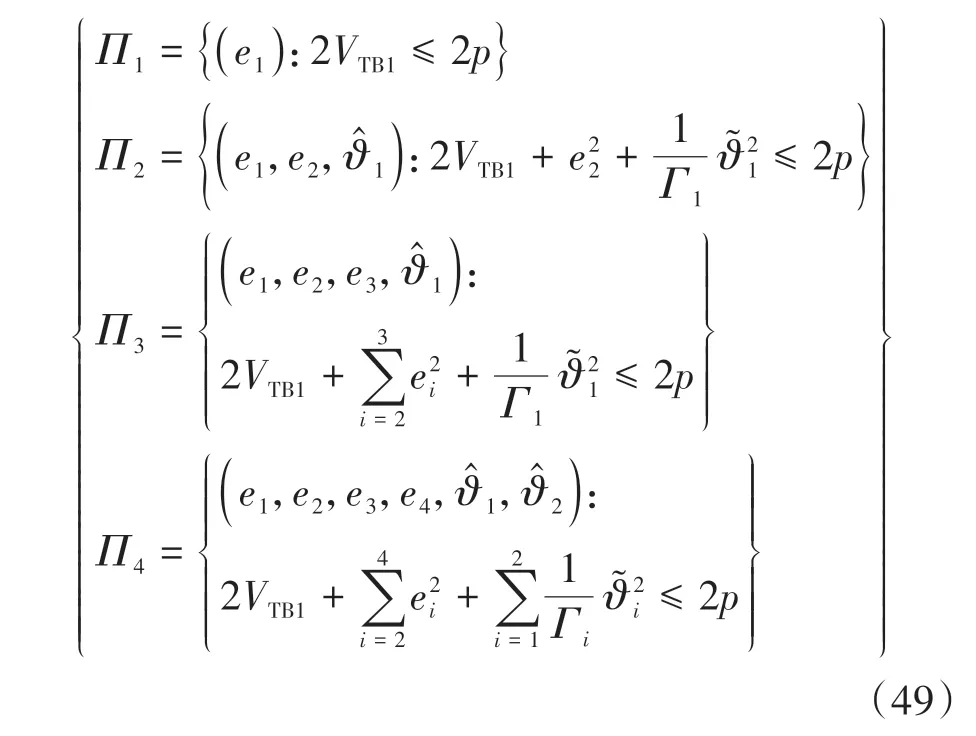
如果初始狀態(tài)滿足Πi,r1(0) ∈(-r10,r10),其中i=1,2,3,4,那么,所提出的控制方案可以滿足所有不等式的成立.
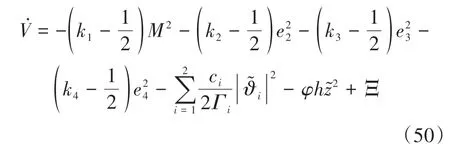
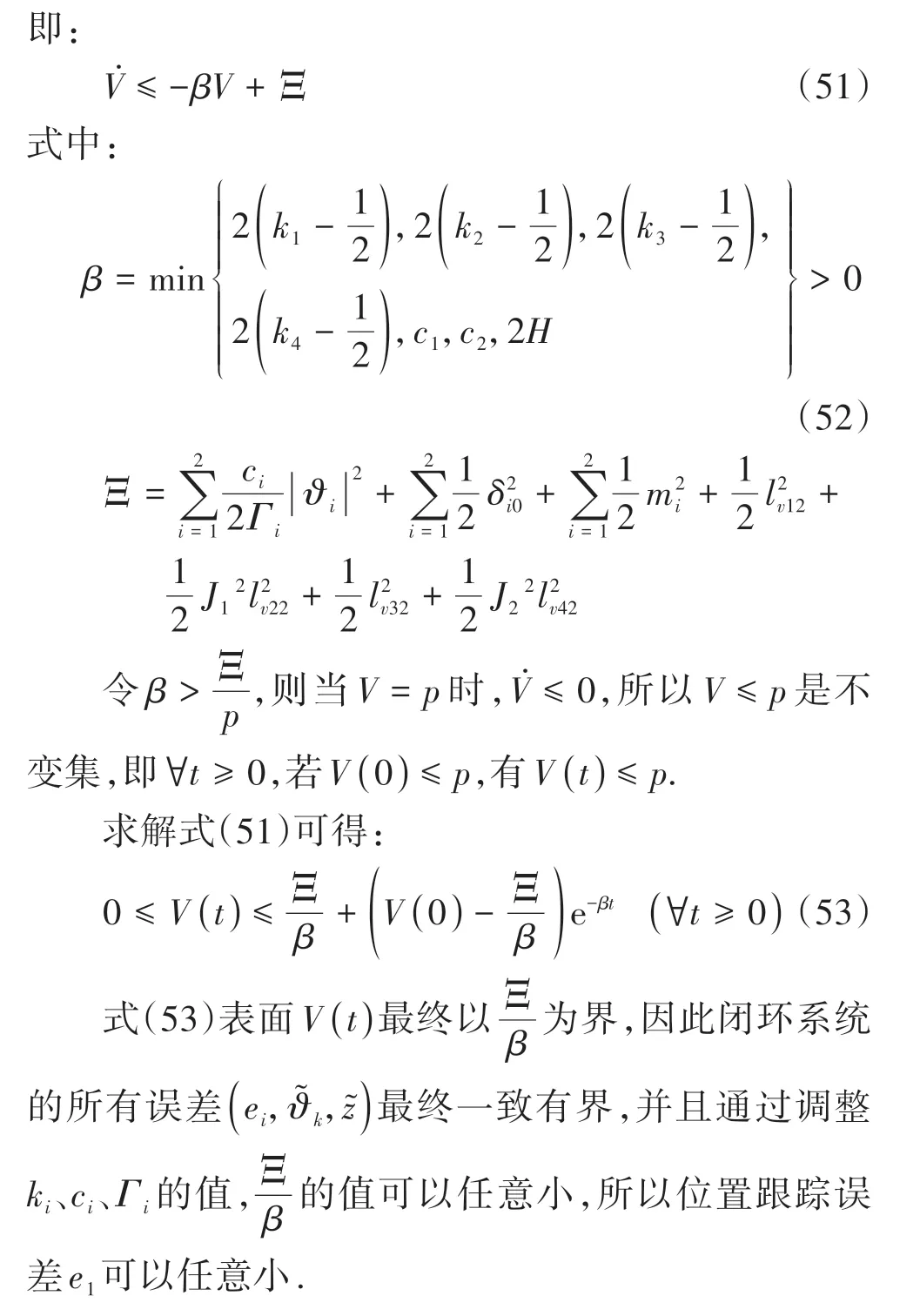
證明:
4 仿真分析
機(jī)器人關(guān)節(jié)模型參數(shù)如表1 所示[17];LuGre 摩擦模型參數(shù)如表2所示[17].
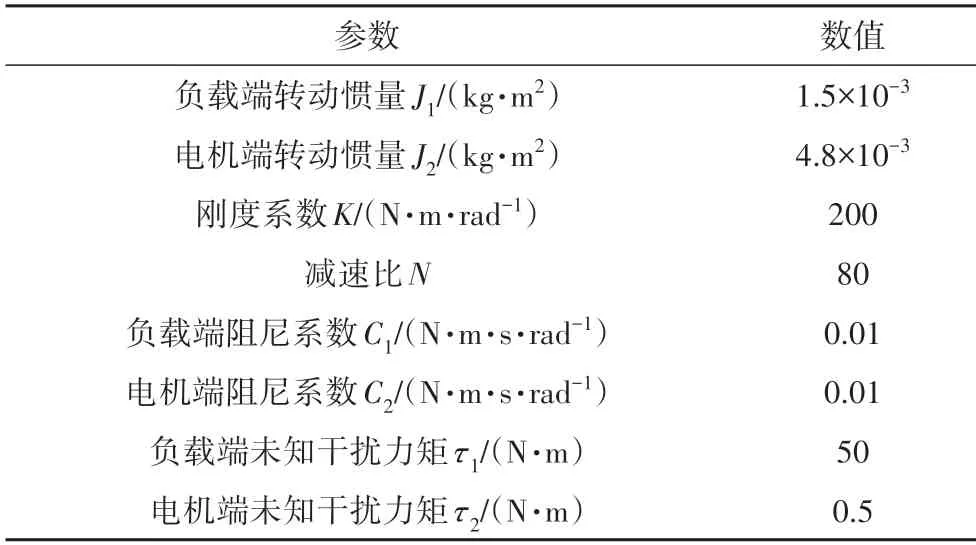
表1 機(jī)器人關(guān)節(jié)模型參數(shù)Tab.1 Robot joint model parameters

表2 LuGre摩擦模型參數(shù)Tab.2 LuGre friction model parameters
控制參數(shù)輸出約束r1=0.2,k1=20,k2=k3=k4=50,λ2=0.01,λ3=λ4=0.1;選取位移參考信號(hào):x1d=1 -cost.設(shè)置加載至負(fù)載端的外部未知干擾力矩為τ1=50 N · m,電機(jī)端的外部未知干擾力矩為τ2=0.5 N · m,PID控制器參數(shù):kp=80,ki=40,kd=1.
4.1 跟蹤效果
圖1 為在輸出約束下FABC(Fuzzy Adaptive Backstepping Control)、RBFDSC 和PID 控制器對(duì)參考軌跡的跟蹤效果對(duì)比圖.3 種控制器均能對(duì)參考軌跡實(shí)現(xiàn)一定精度的跟蹤效果,從局部放大圖中可以看出FABC控制方法輸出軌跡最接近參考軌跡.
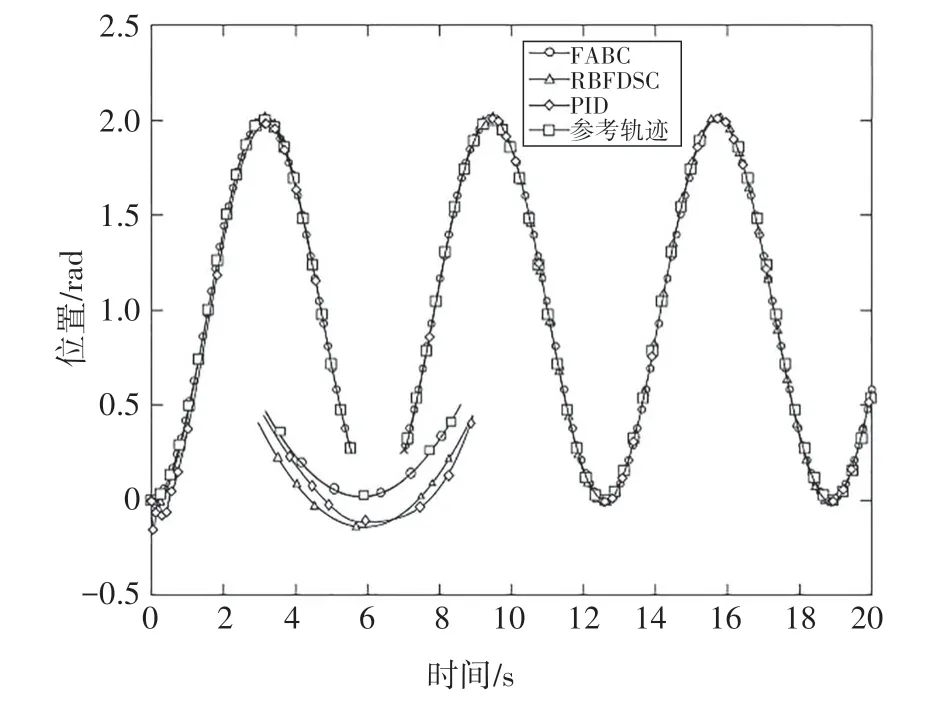
圖1 3種控制器的軌跡跟蹤Fig.1 Trajectory tracking of three controllers
圖2 為FABC、RBFDSC 和PID 控制器與參考軌跡的跟蹤誤差對(duì)比圖.從圖2 可以看出,PID 控制器的軌跡跟蹤誤差在±0.2 rad 以內(nèi),RBFDSC 跟蹤誤差在±0.05 rad之內(nèi),F(xiàn)ABC在輸出受限時(shí)的跟蹤誤差在±0.015 rad之內(nèi).可見(jiàn),F(xiàn)ABC 控制方法可以顯著提高對(duì)給定信號(hào)的跟蹤效果;當(dāng)輸出受限時(shí),F(xiàn)ABC 最大跟蹤誤差僅為PID的最大跟蹤誤差的7.5%、RBFDSC的3%,所以本文提出的FABC控制算法的精度更高.

圖2 3種控制器的軌跡跟蹤誤差Fig.2 Trajectory tracking error of three controllers
4.2 外界擾動(dòng)與摩擦補(bǔ)償效果分析
在減速器端和電機(jī)端施加外界擾動(dòng)力矩分別為:τ1=50 N · m,τ2=0.5 N · m.模糊神經(jīng)網(wǎng)絡(luò)自適應(yīng)律的參數(shù)為:Γ1=Γ2=0.01,c1=c2=5.自適應(yīng)改進(jìn)系數(shù)φ、ξ的參數(shù):η1=0.008,η2=3.20.
圖3 為神經(jīng)網(wǎng)絡(luò)對(duì)負(fù)載端的外部未知干擾力矩為τ1=50 N·m 的補(bǔ)償情況,圖4 為神經(jīng)網(wǎng)絡(luò)對(duì)電機(jī)端的外部未知干擾力矩為τ2=0.5 N·m 的補(bǔ)償情況.由圖3 和圖4 可知,在施加外界力矩?cái)_動(dòng)后,模糊神經(jīng)網(wǎng)絡(luò)1(Fuzzy Radial Basis Function1,F(xiàn)RBF1)和模糊神經(jīng)網(wǎng)絡(luò)2(Fuzzy Radial Basis Function2,F(xiàn)RBF2)都可以迅速響應(yīng)并以較小的誤差跟蹤期望軌跡.圖5 為實(shí)際摩擦力的補(bǔ)償效果,通過(guò)在LuGre 模型中引入?yún)?shù)φ、ξ并采用自適應(yīng)方法實(shí)現(xiàn)了對(duì)非線性摩擦力的準(zhǔn)確跟蹤.圖6 給出了摩擦力的跟蹤誤差值.可知,對(duì)改進(jìn)后的LuGre 模型可以較好地進(jìn)行自適應(yīng)摩擦補(bǔ)償,摩擦力誤差控制在-0.7~0.4 N 之內(nèi).綜上,所提出的自適應(yīng)控制器對(duì)外界擾動(dòng)力矩與實(shí)際摩擦力都有非常好的補(bǔ)償效果且具有較強(qiáng)的魯棒性.
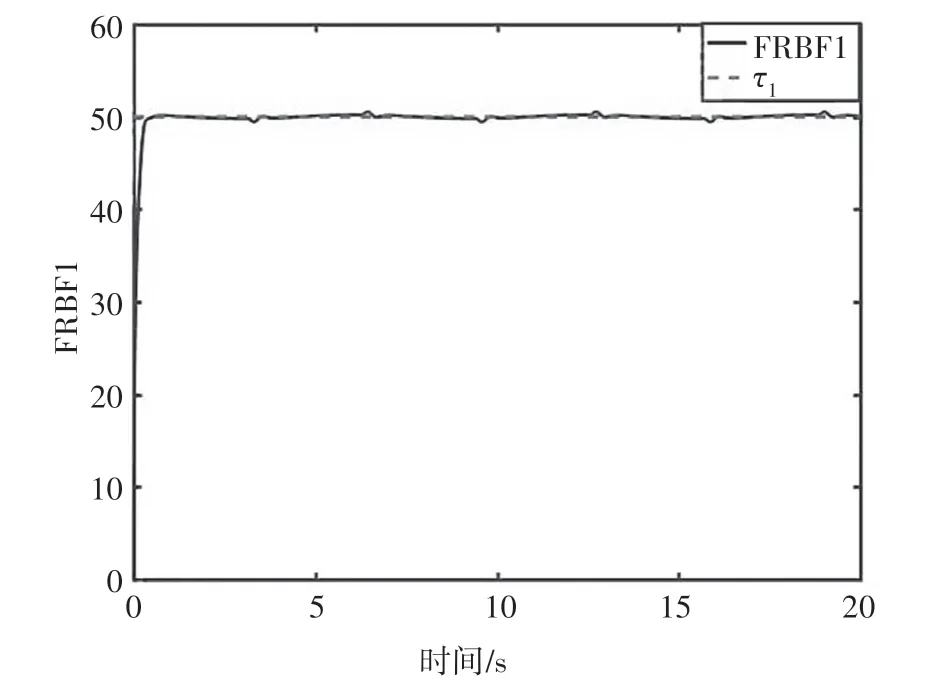
圖3 FRBF1對(duì)τ1逼近Fig.3 Approximation of FRBF1 to τ1
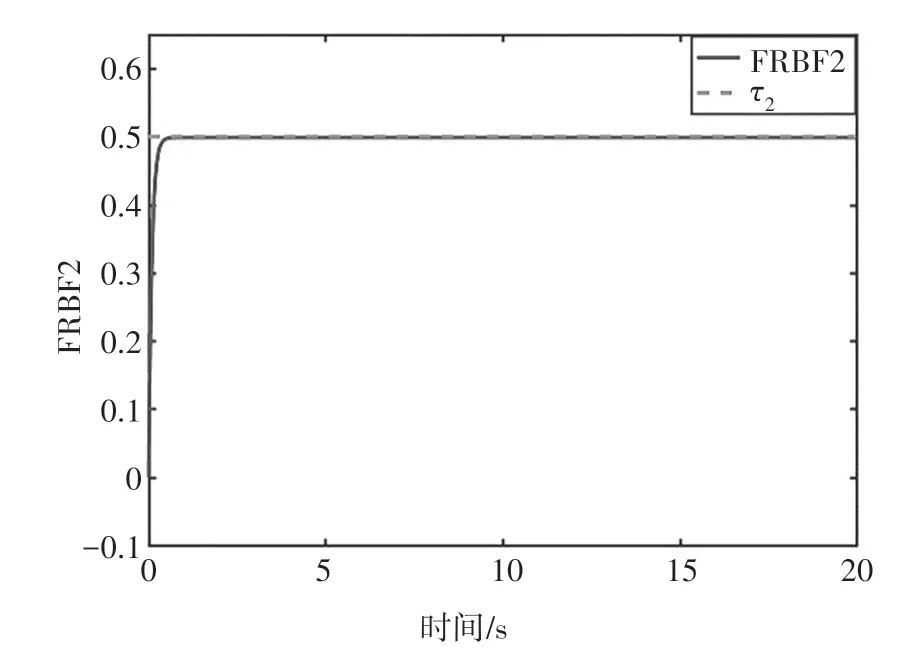
圖4 FRBF2對(duì)τ2逼近Fig.4 Approximation of FRBF2 to τ2
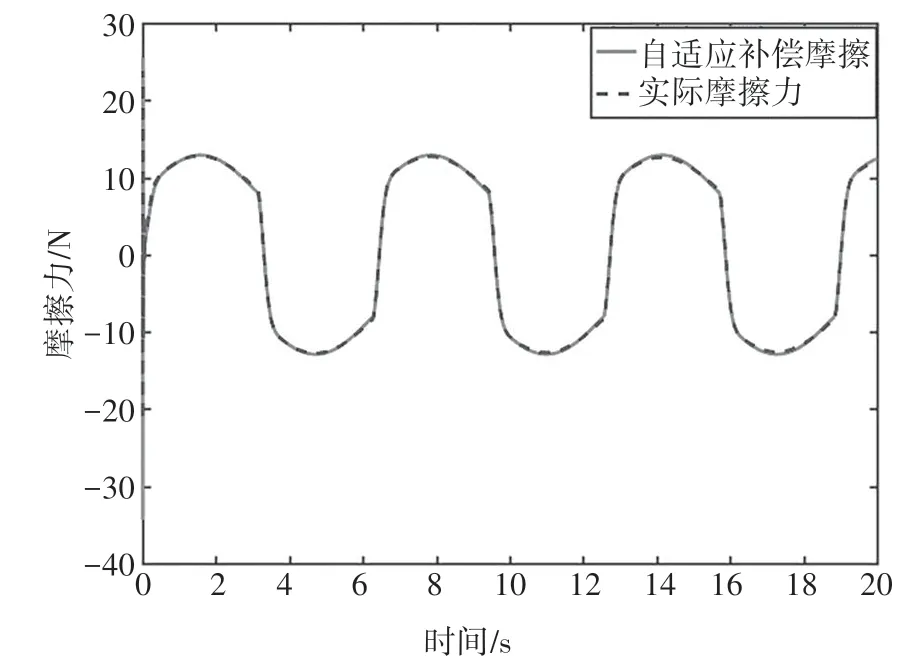
圖5 改進(jìn)后LuGre模型對(duì)摩擦力補(bǔ)償效果圖Fig.5 Compensation effect of modified LuGre model on friction force
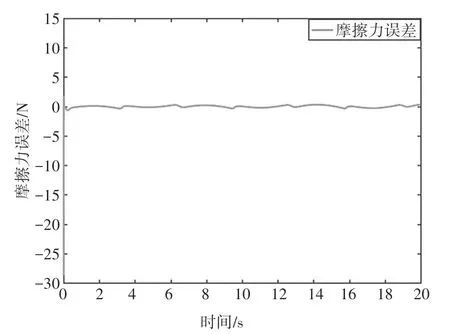
圖6 摩擦力誤差變化Fig.6 Error variation of friction force
4.3 LuGre摩擦模型參數(shù)變化下的仿真分析
為了更好地驗(yàn)證本文提出的自適應(yīng)控制算法的魯棒性,接下來(lái)分析控制算法對(duì)變參數(shù)LuGre 模型的跟蹤效果,LuGre摩擦模型參數(shù)取值如表3所示.
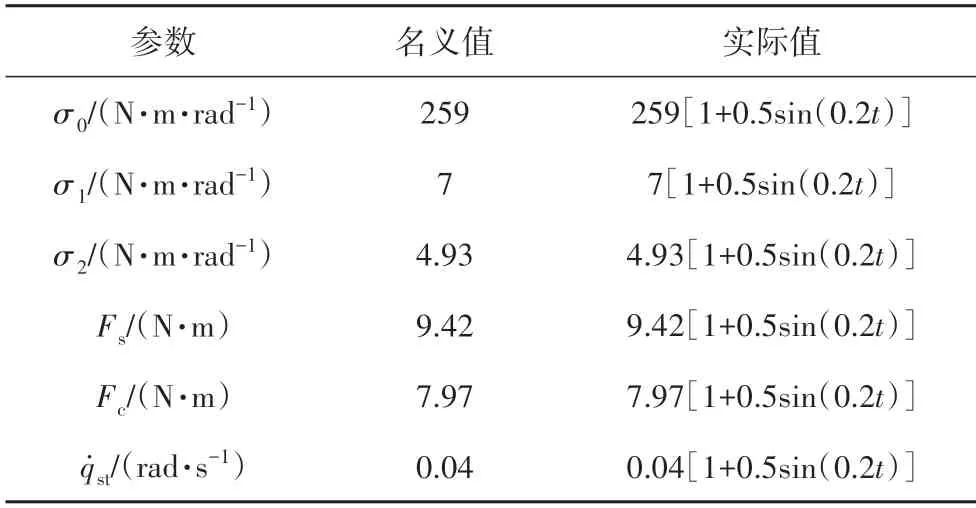
表3 LuGre摩擦模型動(dòng)態(tài)參數(shù)Tab.3 LuGre friction model dynamic parameters
圖7 和圖8 分別為摩擦模型參數(shù)變化下的控制器對(duì)參考信號(hào)的軌跡跟蹤情況以及軌跡跟蹤誤差.在參數(shù)變化的情況下,該方法仍可以有效跟蹤給定軌跡,且跟蹤誤差被控制在±0.2 × 10-3rad 之內(nèi).由此可知,提出的控制器具有較高的魯棒性,可以精確地對(duì)參考軌跡進(jìn)行跟蹤.
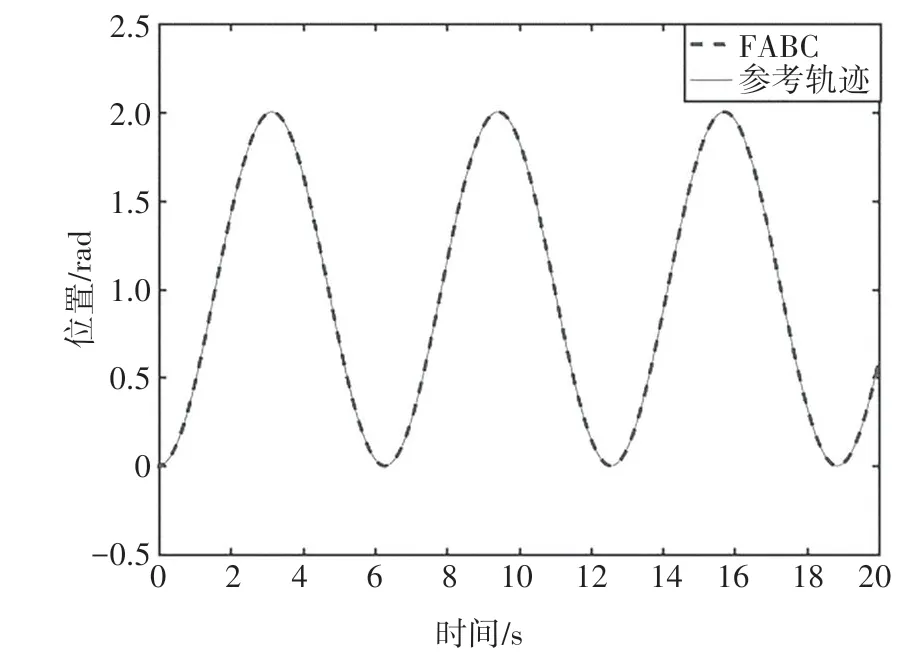
圖7 動(dòng)態(tài)參數(shù)變化下的控制器跟蹤軌跡Fig.7 Trajectory tracking of controller under dynamic parameters variation
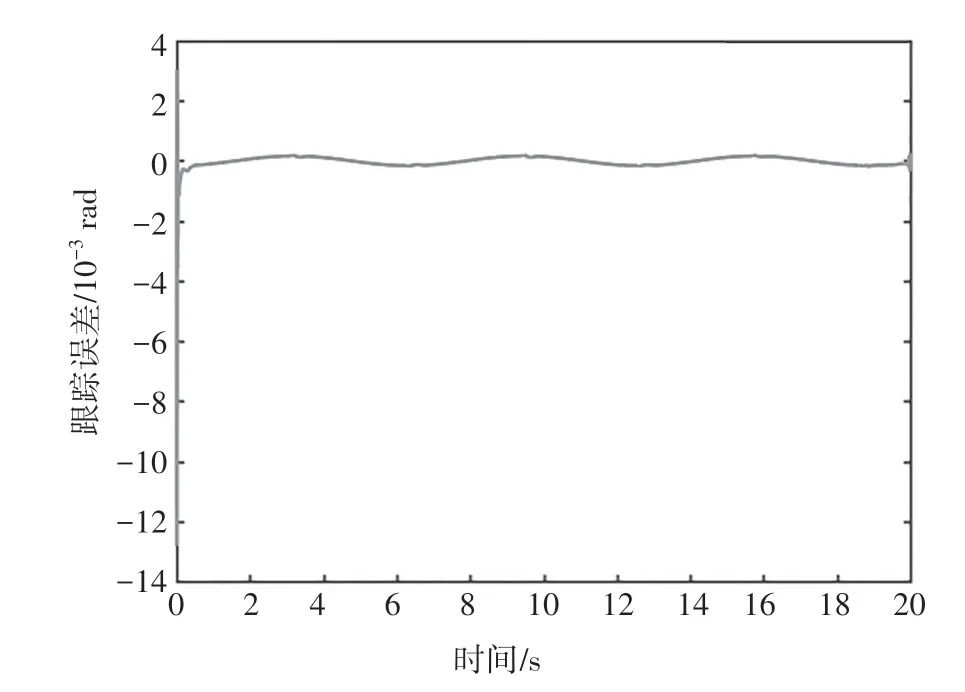
圖8 動(dòng)態(tài)參數(shù)變化下的軌跡跟蹤誤差Fig.8 Trajectory tracking error under dynamic parameters variation
圖9 和圖10 為動(dòng)態(tài)參數(shù)變化后,改進(jìn)系數(shù)φ、ξ自適應(yīng)下的摩擦補(bǔ)償效果以及其摩擦力補(bǔ)償誤差.由圖9 可知,在LuGre 模型參數(shù)動(dòng)態(tài)變化時(shí),所提出的改進(jìn)系數(shù)自適應(yīng)方法仍可較為精確地對(duì)實(shí)際摩擦力進(jìn)行摩擦補(bǔ)償,且誤差控制在-0.8~0.6 N 之內(nèi).由此證明了本文所提出的控制器可以實(shí)現(xiàn)精確控制,且具有較強(qiáng)的魯棒性.
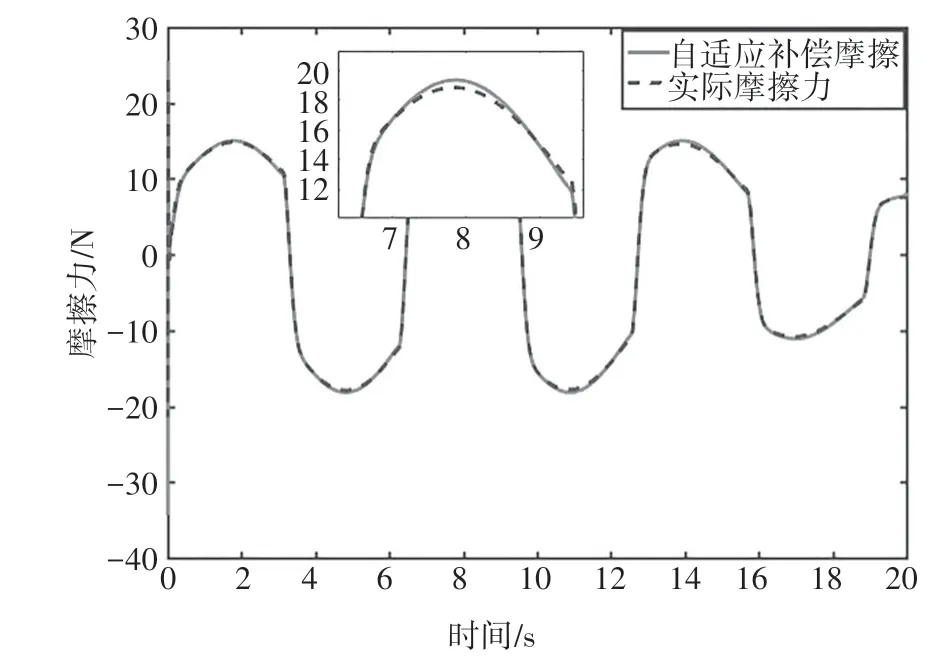
圖9 動(dòng)態(tài)參數(shù)變化下的自適應(yīng)摩擦力補(bǔ)償效果圖Fig.9 Adaptive friction compensation effect under dynamic parameters variation
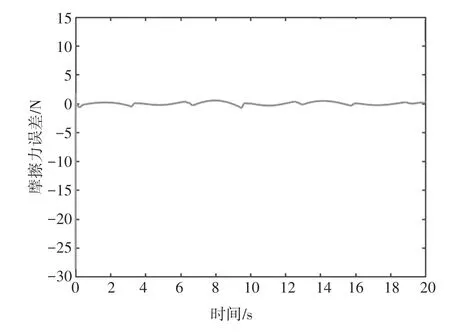
圖10 動(dòng)態(tài)參數(shù)變化下的摩擦力誤差Fig.10 Friction force error of dynamic parameters variation
5 結(jié)論
針對(duì)機(jī)器人關(guān)節(jié),提出了一種基于摩擦補(bǔ)償?shù)哪:赃m應(yīng)反步控制方法,以實(shí)現(xiàn)對(duì)給定參考信號(hào)在非線性摩擦和外界未知力矩的干擾環(huán)境的精確穩(wěn)定跟蹤控制.通過(guò)引入鬃毛平均變形量φ,黏性摩擦系數(shù)變化量ξ改進(jìn)了LuGre 摩擦模型,設(shè)計(jì)了帶摩擦補(bǔ)償?shù)哪:赃m應(yīng)反步控制器,減小了非線性摩擦和外界未知干擾力矩的影響并驗(yàn)證了在動(dòng)態(tài)摩擦參數(shù)變化下,所提出的自適應(yīng)摩擦補(bǔ)償方法仍可對(duì)摩擦力準(zhǔn)確跟蹤,誤差控制在-0.8~0.6 N 之內(nèi).在MATLAB/Simulink 環(huán)境下進(jìn)行仿真實(shí)驗(yàn),驗(yàn)證了所提出控制方法的有效性.結(jié)果表明:與傳統(tǒng)PID 和RBFDSC 控制相比,本研究提出的FBAC 控制方法對(duì)摩擦參數(shù)變化和外界未知干擾力矩具有較強(qiáng)的魯棒性,可以有效提高系統(tǒng)的位置跟蹤精度,跟蹤誤差分別提高了近7.5%和3%.
在未來(lái)研究中可以考慮關(guān)節(jié)減速器遲滯、非線性剛度等因素的影響,實(shí)現(xiàn)對(duì)動(dòng)力學(xué)模型的進(jìn)一步優(yōu)化,設(shè)計(jì)出具有更高精度的控制器.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19