基于地面站輔助的無人機自主架線系統
2022-11-03 11:44:10胡士強羅靈鯤
工程設計學報 2022年5期
陳 強,胡士強,羅靈鯤,劉 冰,方 元
(1.上海交通大學航空航天學院,上海 200240;2.中國航空工業無線電電子研究所,上海 200240)
近年來,我國經濟發展迅猛,國民生活水平日益提高,對電力建設的需求日益增長。在輸電網絡建設過程中,導引繩的展放是一個重要的前序環節。傳統的導引繩展放一般采用人工作業或者絞磨機等機械設備輔助完成[1],但該類方法效率低下,且電力工人在高空作業時存在巨大的安全隱患。此外,龐大復雜的機械設備等可能會對周圍植被、農田和交通道路等造成影響和破壞,增加了額外的建設成本[2]。為有效提高施工效率以及降低高空作業所產生的危險和施工成本,國內外許多電力公司逐漸開始采用飛行器來完成電力架線作業。當前,用于架線的輔助飛行器主要有4類:飛艇、動力傘、直升機和無人機(unmanned aerial vehicle,UAV)[3-5]。其中,多旋翼無人機相較于其他幾種飛行器具有成本低廉、易于操控等顯著優勢,此外其還能夠垂直起降,受作業環境場地的限制小,且具備懸停作業的能力,是未來利用飛行器輔助電力架線的主要發展方向。
利用無人機進行電力架線的控制方式主要分為3種[6]:基站控制、半自主控制和智能控制。基站控制是指操縱員利用地面基站手動向無人機持續發布控制指令,其本質上是利用無線電來進行控制的,但該類技術受環境空間的限制較強,以及人工操縱需要經過專業訓練,施工效率低下且人工成本高。半自主控制是指將地面基站導航和預設程序相結合的一種控制方式,但該方法的智能化水平較低,缺乏應對作業過程中突發狀況的能力。智能控制是指無人機根據當前周圍環境及自身狀態,結合任務需求自主做出響應,而不需要依靠人工指令,該方法具有較高的穩定性和工作效率。因此,基于智能控制的無人機架線技術已成為主要研究趨勢,結合地面站的無人機自主架線系統是其中的一種重要方案。
利用無人機完成電力架線的核心步驟如下:通過自主程序控制無人機到達指定位置并識別安裝在電桿上的架線弓,而后無人機拖曳導引繩穿越架線弓完成架線。在該過程中,無人機需要依賴精確定位飛到目標位置并準確識別架線弓。此外,還要求無人機具備較高的安全性,能夠避開可能遇到的障礙物。
目前,針對無人機自主架線過程中避障的相關算法研究已取得了一系列進展。其中,基于全局地圖的經典避障算法(如A*算法、隨機路法和人工勢場法等)在應對意外情況和動態環境時成功率低且避障效果較差,而根據實時環境感知進行避障的智能反應算法(如基于遺傳算法、粒子群優化算法和蜂群算法等的避障算法)的收斂速度較慢,且易陷入局部最優解[7]。近年來,基于強化學習的避障算法也得到了研究,但仍存在較多不足,例如:基于深度Q-學習(deep Q-learning,DQN)[8]框架的避障算法的作動空間是離散的,無法生成連續的避障軌跡。此外,上述避障算法都只有在準確的環境建模或精確的環境感知基礎上才能充分發揮自身優勢,從而實現較好的避障效果。除了利用算法實現避障外,還可以采用地面站人工操控的方式來完成避障[9]。但是,當前常用的一些地面站只能輔助操縱員手動操控無人機,自動化水平低,且對操縱員的操作技術要求較高。此外,長期手動操控會增加操縱員的工作負擔。
近年來,國內學者針對無人機自主架線技術進行了相當充分的研究。例如:羅旻等[10]設計的無人機全自動展放引線系統經實地驗證,能夠使用無人機按照地面站設定的航點完成架線任務,但其控制方式屬于半自主控制,無人機的定位十分依賴GPS(global positioning system,全球定位系統),且無自主避障能力。在此基礎上,上海交通大學的研究團隊提出了基于RTK(real-time kinematic,實時動態)與視覺輔助定位的自主無人機架線系統[11],成功利用無人機完成自主架線任務。但該系統也無法規避GPS/RTK信號受擾甚至失效的問題,此外其避障完全依賴避障算法,當存在未檢測到的細小障礙物或周圍環境過于復雜時,易出現避障失敗的情況,導致無人機安全性不足。
基于上述問題,為實現安全高效的無人機自主架線,筆者提出了一種基于地面站輔助的無人機自主架線系統。為使無人機具有自主避障能力,保障架線作業安全性,采用地面站輔助與避障算法相結合的避障策略,即利用地面站監控、干預控制的方式來改善無人機自主避障能力不足的問題。為解決GPS受擾環境下的無人機定位問題,采用視覺里程計和GPS相融合的定位方式[12],即利用視覺里程計為無人機提供GPS拒止時的短期定位支持,且GPS也能夠為視覺里程計提供全局約束和糾偏。
1 基于地面站輔助的無人機自主架線系統設計
1.1 硬件框架設計
基于地面站輔助的無人機自主架線系統的硬件框架如圖1所示,主要由無人機子系統、地面站子系統和通信子系統組成。其中:無人機子系統是主要的任務執行機構;地面站子系統主要負責監控并顯示無人機的重要信息,并在必要時改變其控制模式以保證安全;通信子系統主要通過數傳和圖傳實現上述2個子系統間的實時通信。
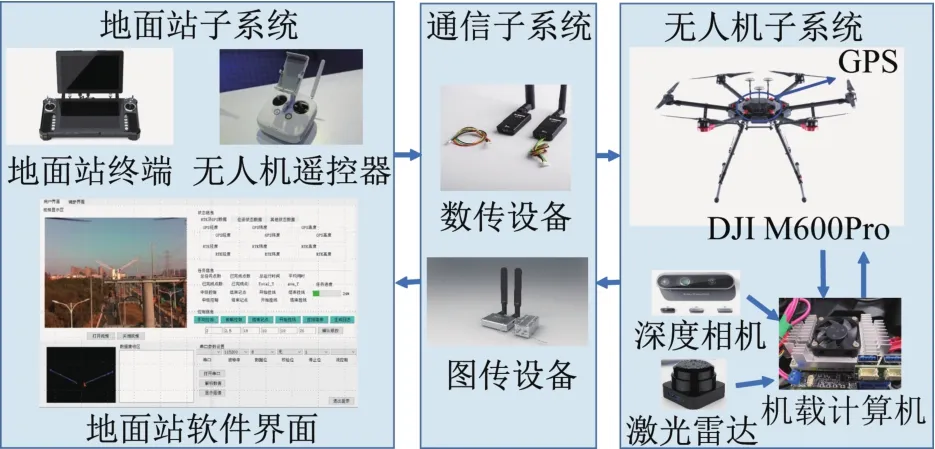
圖1 基于地面站輔助的無人機自主架線系統硬件框架Fig.1 Hardware framework of UAV autonomous stringing system based on ground station assistance
無人機子系統為整個架線系統的核心,主要由無人機和各類機載傳感器組成。本文選用DJI M600Pro無人機,其搭載的傳感器主要有Intel Release D435i深度相機、激光雷達和GPS等。同時,選用NVIDIA Jetson TX2嵌入式開發板作為機載計算機進行數據計算和處理。
地面站子系統主要由手持式地面站終端(T21s)、地面站軟件、無人機遙控器及其他硬件設備組成。其中,手持式地面站終端搭載Windows系統;地面站軟件是利用Qt平臺開發的界面軟件,安裝在手持式終端上。地面站子系統具備如下功能:獲取無人機的重要信息,可視化顯示重要信息及接收/發送重要指令等。地面站軟件分為顯示模塊和控制模塊,用于解析來自數傳的數據和圖傳的云臺畫面并實時顯示,操作員可以對無人機作業場面及周圍環境進行監控;同時,操作員可以根據無人機的狀態,隨時通過地面站向無人機發送指令來進行控制。當無人機接收到地面站的指令后,機載計算機中相應程序可立即將無人機當前的控制模式改為指定模式。因此,當無人機無法僅靠避障算法完成自主避障或出現其他意外時,可以通過地面站及時主動切換控制模式,即利用地面站對無人機進行人工操控,從而避免危險情況的發生。
通信子系統主要包括數傳設備和圖傳設備。數傳采用串口通信協議,傳輸的數據主要分為上行數據和下行數據。上行數據為地面站終端傳輸到無人機的數據,主要是地面站對無人機的指令:在常規情況下,地面站向無人機持續發送機載控制的指令,無人機一直處于按照機載程序自主飛行的狀態;在緊急情況下,地面站向無人機發送手動控制的指令,無人機將自身的控制模式切換為手動模式,然后懸停并等待地面站終端和遙控器的下一步操作指令后再執行。下行數據為無人機傳輸到地面站終端的數據,主要包括無人機的速度、位置、當前控制模式和云臺模式等自身狀態信息,當前任務執行進度,以及部分有必要在地面站軟件界面上顯示的機載程序的執行結果(如架線弓檢測結果)等。圖傳用于傳輸無人機云臺捕捉的實時畫面。云臺將捕捉到的畫面以視頻形式通過圖傳設備發送到圖傳接收機,圖傳接收機連接到地面站終端,地面站軟件通過調用OpenCV庫對接收到的圖像進行解析顯示。
1.2 軟件系統設計
基于地面站輔助的無人機自主架線系統的軟件框架如圖2所示。整個軟件框架基于ROS(robot operating system,機器人操作系統)[13]開發。在ROS工作空間內,以模塊化的方式分別建立多個功能包和節點,用于實現不同功能。其中:通信及飛行任務管理模塊是主節點,接收來自地面站的任務輸入和指令并生成無人機自主作業路徑;架線弓檢測模塊依靠深度相機拍攝的深度圖及RGB(red green blue,紅綠藍)圖來對每根電桿上的架線弓進行識別,識別結果一方面作為任務規劃節點的輸入,另一方面作為重要信息傳遞至地面站并顯示;障礙物檢測與路徑規劃模塊接收來自激光雷達和深度相機的數據,先利用避障算法生成安全路徑并發送至任務規劃節點,再結合架線任務重新規劃無人機需執行的路徑,并將路徑以速度和位置等控制指令的形式傳遞到無人機飛控及執行機構;定位模塊可為無人機的飛行提供精確的位置和姿態信息。

圖2 基于地面站輔助的無人機自主架線系統的軟件框架Fig.2 Software framework of UAV autonomous stringing system based on ground station assistance
構造合理的軟、硬件框架是無人機能夠執行自主架線的前提。以此為基礎,通過高效的算法協助無人機提高自主作業的安全性、準確率和效率。
2 基于地面站輔助的無人機自主避障策略
具備自主避障能力是無人機智能化水平的體現,更是無人機實現自主架線必不可少的條件。無人機避障的一般步驟為:先根據傳感器采集到的環境信息判定當前是否存在障礙物,并對是否會與障礙物發生碰撞進行檢測;然后根據判定和檢測結果規劃合理安全的避障路徑并執行。針對無人機在電力環境下對障礙物的感知能力弱,以及在復雜環境下避障算法可能失效的問題,在自主避障算法的基礎上引入地面站輔助避障策略。
2.1 障礙物判定及碰撞檢測
一般而言,當障礙物與無人機之間的距離小于安全閾值時,無人機才需要執行避障程序。為了避免無人機出現過于保守或不必要的避障行為,以提高其自主執行任務及避障的效率,采用碰撞檢測方法來識別無人機前方的障礙物。從幾何學角度看,碰撞檢測問題可以看成求解2個多面體間的相交問題[14]。碰撞檢測算法一般分為空間分解法[15]和層次包圍盒法[16]兩大類。其中,包圍盒法構造簡單且容易測試,適用于復雜環境中的碰撞檢測,應用范圍更為廣泛,故本文采用這種方法來實現無人機前向障礙物判定以及碰撞檢測。
如圖3所示,利用軸向包圍盒法對無人機碰撞檢測進行建模:先以無人機質心為原點構建機體坐標系O-XYZ(X軸正方向為無人機的前進方向),再以機體坐標系為參考構建長方體包圍盒ABCD-A1B1C1D1;為保證無人機安全,在無人機前向上增加2 m的安全余量,即長方體包圍盒A1B1C1D1-A2B2C2D2,其中線段AA1的長度S=2 m。
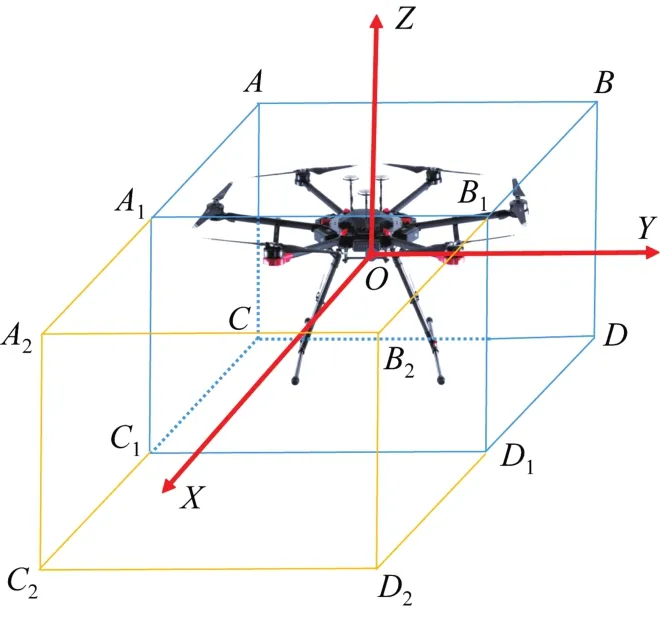
圖3 無人機碰撞檢測包圍盒模型Fig.3 Collision detection surround box model of UAV
當激光雷達和深度相機掃描點進入包圍盒內部時,判定此時無人機有發生碰撞的可能性,需要執行避障策略。
2.2 基于激光雷達的避障算法設計
結合無人機架線的任務需求,在遇到障礙物時主要考慮水平面內的橫移避障。因此,可以利用威脅錐模型[17]對無人機前向障礙物進行建模,如圖4所示。圖中:XUk為k時刻無人機的位置矢量,VUk為當前無人機的速度矢量,Xobs為當前障礙物的位置矢量,則障礙物與無人機的相對位置Xk=Xobs-XUk。以Xk和XUk構造二維平面,則威脅錐為無人機當前位置與界線圓的2個切向量(P1、P2)垂直。
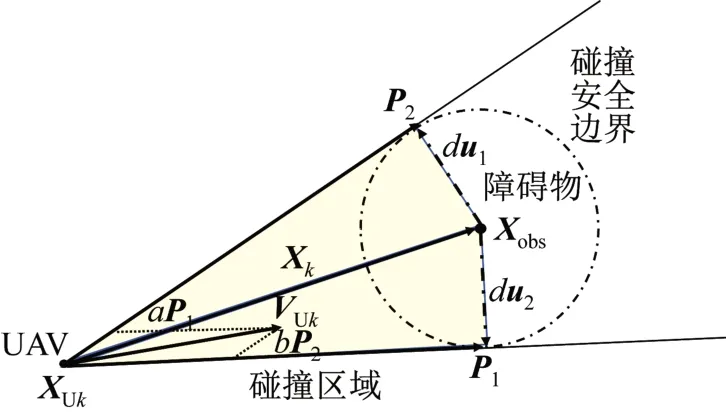
圖4 障礙物威脅錐模型Fig.4 Obstacle threat cone model
根據圖4,切向量P1、P2的計算式如下:

其中:
式中:u1、u2分別為障礙物到切向量P1、P2的單位向量;c、d為模型參數,c由d、Xk、VUk計算得到,實際作業中d=3 m(當無人機與障礙物距離小于3 m時,開始執行避障程序)。
由此可得,無人機的速度矢量VUk可表示為:

式中:a、b為系數,其計算方式見文獻[18]。
無人機的碰撞判據為:a>0且b>0,即在此條件滿足時,無人機存在碰撞危險。
無人機激光雷達可以提供障礙物的距離及角度信息,建立碰撞模型后需要計算無人機避障所需的偏轉角度φ:

式中:ri為障礙物與激光雷達間的距離;θv為無人機速度方向與激光雷達正方向(即無人機機體正方向)間的夾角;θi為障礙物與無人機正方向間的夾角;i為激光雷達掃描到的第i個點。
通過式(4)可計算得出無人機避障所需的最小偏轉角度,無人機沿某方向前進,直到無人機碰撞判據不再成立,即認為無人機完成避障,而后無人機恢復架線的飛行任務,重新向下一目標點飛行。
2.3 基于地面站輔助的無人機避障策略設計
對于2.2節中的避障算法,無人機避障的成功率在很大程度上取決于激光雷達等傳感器的有效性及精度,而電力環境中存在電線電纜、電桿及植被等各類復雜障礙物,這對無人機感知能力的考驗極大。此外,無人機在復雜環境下可能會存在無法避開障礙物的情況。因此,根據實際需求,設計并實現了地面站子系統,通過數傳和圖傳與無人機建立實時的數據交互,實現主動獲取并實時顯示人機云臺和深度相機的實時畫面,并提出基于地面站輔助的無人機避障策略,如圖5所示。
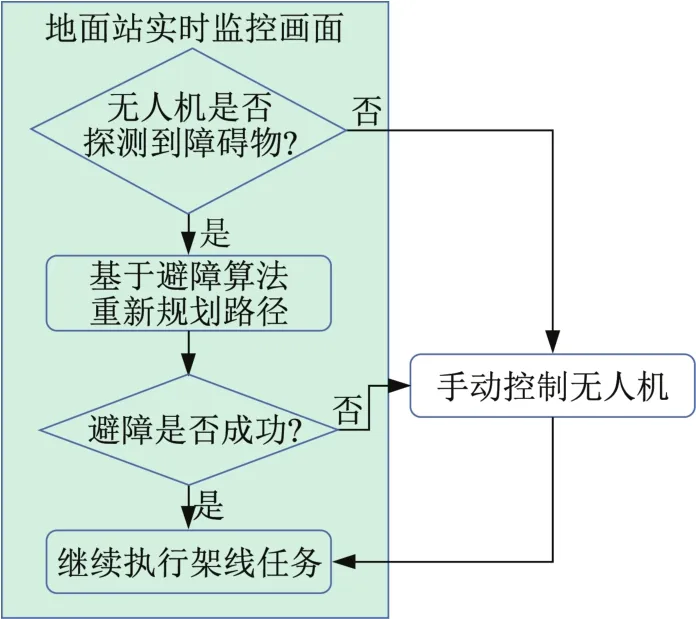
圖5 基于地面站輔助的無人機避障策略Fig.5 Obstacle avoidance strategy of UAV based on ground station assistance
當無人機開始自主架線作業時,激光雷達持續對周圍進行障礙物感知,當感知到障礙物存在并判定有碰撞威脅時,執行自主避障算法來規劃路徑。同時,地面站持續對無人機進行監控,操縱員可以通過地面站顯示的視頻對無人機及周圍環境進行實時監控管理。當發現無人機未感知到障礙物存在或者無人機存在避障失敗、可能發生碰撞的潛在危險時,通過地面站軟件發送指令來對無人機進行干預,即將無人機控制模式由自主控制切換為手動控制,此時無人機會立刻懸停以防止發生危險,操縱員通過地面站對無人機進行安全操作直到無人機脫離危險狀態。
上述基于地面站輔助的避障策略以避障算法為基礎,在絕大部分條件下能夠實現無人機的自主避障,可極大地減輕操縱員的工作負荷。同時,地面站對無人機進行實時監控,必要時可通過地面站對無人機進行干預控制,防止意外情況發生,從而最大程度地保證無人機的安全。
3 無人機自主架線流程設計
使用無人機進行自主架線,除了自主避障外,架線任務規劃、架線弓檢測和精確定位等也是影響架線作業成功率和效率的重要因素,下文將針對上述關鍵環節進行深入探究。
3.1 自主架線任務規劃算法
無人機自主架線任務規劃流程如圖6所示:當系統準備就緒,開始新的架線任務時,首先通過地面站輸入本次作業的目標點位置(電桿的GPS坐標和高度已知),無人機接收到信息后由機載計算機在線規劃任務執行路徑,經地面站確認后發送開始架線的指令,無人機接收指令并執行。當無人機開始作業后,避障模塊開始不斷地進行障礙物判定和碰撞檢測,并且結合目標點和障礙物信息進行路徑規劃,確認路徑安全后執行。在無人機飛至目標點后,開始檢測架線弓并執行穿越架線弓的動作。若無人機未及時檢測到周圍細小障礙物或出現穿越架線弓失敗、導引繩被纏繞等意外情況,可及時通過地面站將無人機的控制模式切換為手動控制,同時利用遙控器控制無人機脫險,而后通過地面站恢復無人機當前任務直到架線完成。
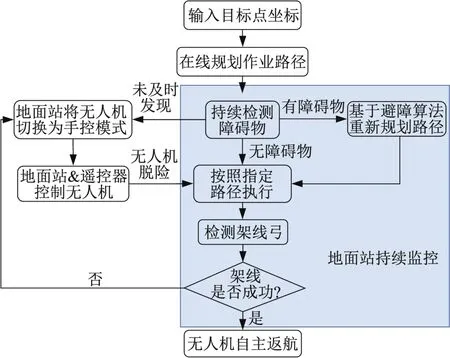
圖6 無人機自主架線流程Fig.6 Flow of UAV autonomous stringing
3.2 融合定位算法和架線弓檢測算法
無人機在執行自主架線任務過程中需要精確定位和準確快速識別架線弓,這樣才能保證作業的成功率和效率。對于無人機的定位問題,本文采用GPS與視覺里程計融合的方式實現位姿估計,并通過擴展卡爾曼濾波(extended Kalman filter,EKF)算法對GPS與視覺里程計的定位結果進行融合。該方式既能利用GPS全局定位對視覺里程計的定位結果進行約束和糾偏,又能利用視覺里程計保證無人機的局部定位精度,且當GPS短暫失效時能夠為無人機的飛行提供定位支持。利用EKF算法融合的優勢如下:可利用GPS開展全局層面的定位,利用視覺里程計實現局部精確、平滑的位置更新[19];相較于非線性優化的融合方式,該方式的計算量更小,更適用于計算資源有限的無人機[20]。為更好地利用無人機自主飛行技術完成電力架線任務,使用位姿估計功能包robot_pose_ekf,其為基于EKF算法開發的融合定位功能包,在實際應用中易實現。
圖7所示為無人機拖曳的導引繩需要穿越的架線弓。無人機在每一次執行架線任務前均需準確檢測到架線弓。目前,目標檢測方法已從傳統的“特征提取+訓練分類”方法逐漸過渡到基于深度學習的方法,其中YOLO系列算法是使用最廣泛的檢測方法之一[21]。但是,上述方法不可避免地存在需要訓練、易受圖像背景干擾以及實時性差等不足。考慮到架線弓具有明顯的顏色特征和幾何特征,可直接利用圖像處理算法進行檢測:一方面該算法易于實現,實時性好;另一方面該算法具有較高的準確率。

圖7 架線弓實物Fig.7 Physical object of stringing bow
架線弓檢測算法流程如下:首先,對深度相機采集的架線弓圖像進行Canny邊緣檢測并進行掩碼合成;然后,利用顏色分割算法對架線弓圖像進行HSV(hue saturation value,色調、飽和度和明度)顏色分割;最后,在獲得紅色邊緣后利用EDLines算法[22]進行直線段檢測,相較于霍夫變換或直線檢測算法(line segment detector,LSD)等,EDLines算法在保證檢測結果準確的前提下具有更好的實時性。考慮到所得紅色直線段中仍可能包含大量環境干擾(如紅色樓宇的輪廓等),結合架線弓長度、角度以及空間不相交等幾何特性對檢測結果進行約束,以有效提高架線弓檢測的準確率。假定直線段檢測結果共獲得n條直線,由于架線弓在大多數情況下是視野中最長的,故按長度對直線段進行排序,從最長的直線段開始往下依次配對,滿足以下所有條件的即為正確的檢測結果:
1)兩線段長度差值在短者長度的30%以內;
2)兩線段夾角約為126°;
3)兩線段的低端近似平行;
4)兩線段不相交。
4 實驗驗證
為驗證本文所提出的無人機自主避障策略、融合定位算法、架線弓檢測算法以及整個自主架線系統的可行性,利用模擬測試和實地實驗展開分析。
4.1 無人機自主避障策略驗證
為了驗證所提出的無人機避障算法的有效性以及基于地面站輔助的無人機避障策略的可靠性,分別在空曠場地和真實電力架線場地中進行實驗。在空曠場地中,為無人機設定一條預定的飛行軌跡。在無人機執行架線任務的過程中,利用手舉牌模擬障礙物,在無人機前方的各個角度隨機進行阻擋,重復多次。在真實電力架線場地中,無人機按照真實架線流程進行作業,通過遠距離觀察并結合地面站的監控畫面,對無人機飛行過程中的避障動作進行記錄,重復多次真實作業流程加以驗證。不同場地中無人機自主避障實驗結果如表1所示。
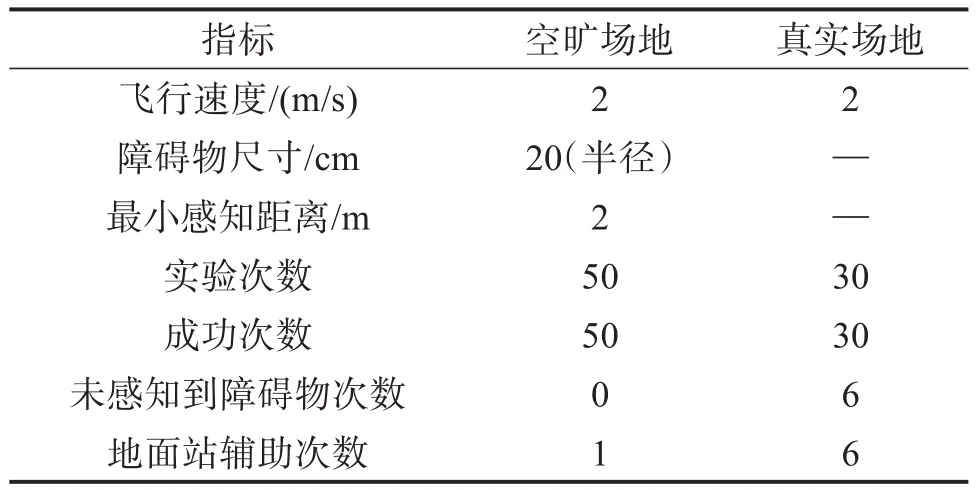
表1 不同場地中無人機自主避障實驗結果Table 1 Experimental results of autonomous obstacle avoidance of UAV at different sites
4.2 融合定位算法和架線弓檢測算法驗證
本文所設計的無人機自主架線系統在ROS工作空間中主要包含4個功能模塊,分別由對應的節點實現,不同節點之間通過發布和訂閱話題(Topic)實現數據傳輸。基于上述設計,對其中某個功能模塊進行算法優化或更替較為方便,只需修改對應功能包,確保話題名稱一致即可。
對于融合定位算法,由于難以獲取參考值,在真實電力架線場地中開展定性實驗。經過驗證,利用GPS和視覺里程計融合的定位方式能夠代替RTK定位方式,其定位結果的誤差在可允許范圍(±30 cm)內,滿足無人機自主架線任務需求。相比于RTK定位方式,融合定位方法能大幅度降低傳感器成本,同時在部分GPS/RTK信號受干擾時仍能保持較高的魯棒性,提高了無人機執行任務時的穩定性。
對于架線弓檢測算法,主要通過模擬測試和實地實驗來驗證。由于在真實電力架線場地中所獲取的架線弓圖像背景復雜,對檢測算法造成的干擾較大,分別在室內、室外草坪和真實電力架線場地中開展相關測試,以對算法進行驗證。實驗結果表明,所提出的架線弓檢測算法具有較好的實時性和較高的準確率。在不同光線條件下,顏色分割算法的HSV參數可能會影響架線弓檢測結果,通過重復實驗得出最優的HSV參數,如表2所示。表中:hmax和hmin、smax和smin、νmax和νmin分別為色調、飽和度、明度的最大值和最小值。

表2 顏色分割算法的HSV參數最優值Table 2 Optimal values of HSV parameters of color segmentation algorithm
在室內環境下,將架線弓放置在水平地面上,手持深度相機正對架線弓并緩慢靠近,當距離架線弓2.5~3 m時保持不動,觀察架線弓檢測結果并重復多次實驗。在室外草坪環境下,將架線弓放置在離地面2 m高的臺架上,將深度相機固定在無人機正前方,利用遙控器和地面站控制無人機與架線弓保持同一高度并緩慢靠近,同樣在距離為2.5~3 m時保持懸停,觀察架線弓檢測結果并重復多次實驗。在真實電力架線場地中,依次輸入電桿的GPS坐標,然后令無人機執行自主架線程序,并在地面站軟件界面上觀察架線弓檢測結果,并重復多次實驗。不同場地中架線弓檢測實驗結果如表3所示。
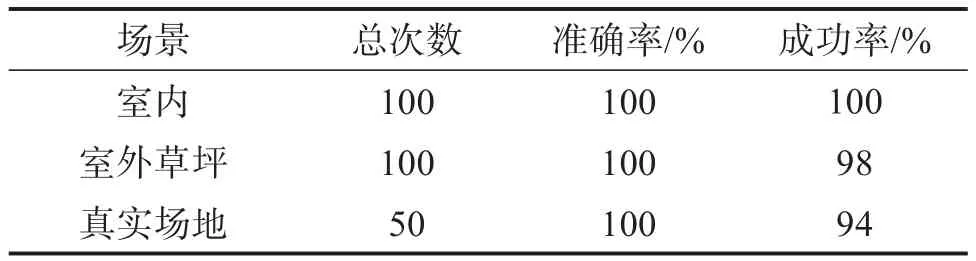
表3 不同場地中架線弓檢測實驗結果Table 3 Experimental results of stringing bow detection at different sites
由表3結果可知,在3種場地中,架線弓檢測算法均沒有出現誤檢(即錯誤判定其他物體為架線弓)的情況,準確率滿足實際需求。在室外草坪環境中出現2次未檢測到的情況,而在真實電力架線場地中共出現3次,這是因為室外光線可能會發生變化且存在較多背景干擾。為了解決該問題,當在實際任務中檢測不到架線弓時,無人機執行局部搜索程序,逐漸擴大搜索范圍直至檢測到架線弓。
4.3 無人機自主架線系統驗證
為了驗證整個無人機自主架線系統功能的完整性和可靠性,在電力公司專業架線訓練場地開展實物實驗。利用無人機牽引電力導引繩,在訓練場地中依次飛越3根電桿并完成架線作業,如圖8所示。

圖8 無人機自主架線現場Fig.8 UAV autonomous stringing site
作業電桿高度為11 m左右,每2根電桿間距30~35 m,測試結果如表4所示。在30次作業中,有22次是完全依靠無人機自主作業完成架線任務;由于未檢測到障礙物、導引繩發生纏繞以及卡線等,有8次需要地面站進行輔助并參與架線:當發現無人機作業狀態異常時,通過地面站將無人機的控制模式切換為手動控制,操縱員通過地面站子系統手動操控無人機并最終完成任務。在地面站輔助下,無人機自主架線系統的成功率為100%,不僅高效穩定,而且能夠應對各類突發狀況,具有較高的安全性。
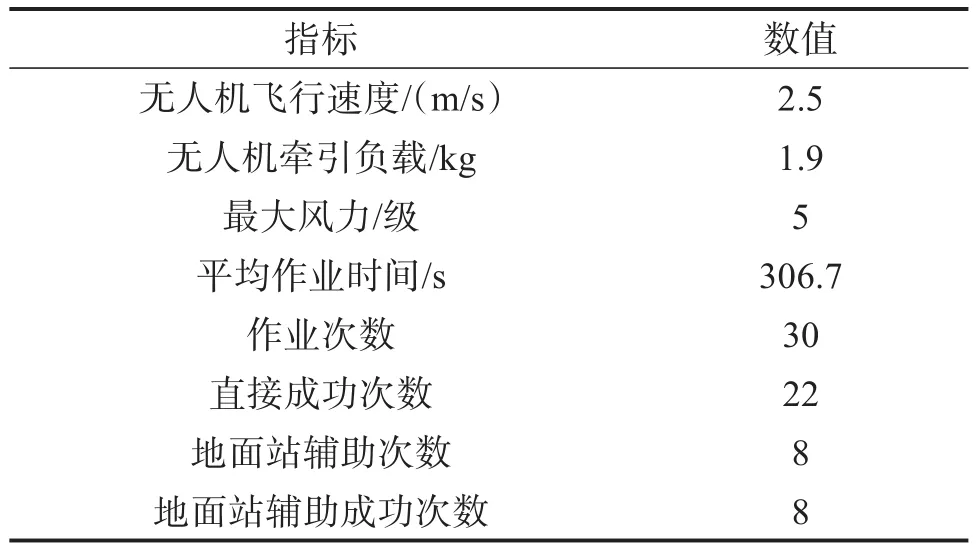
表4 無人機自主架線系統完整作業實驗結果Table 4 Complete operation experiment results of UAV autonomous stringing system
5 總結與展望
為實現無人機自主架線,基于地面站搭建了完整的自主架線系統硬件框架,并基于ROS構造了模塊化的軟件框架。針對無人機感知能力弱、避障能力不足的問題,通過引入基于地面站輔助的避障策略,有效提高了無人機自主避障能力,大大增強了無人機自主架線時的安全性。針對架線過程中無人機定位、架線弓檢測等問題,利用GPS與視覺里程計融合的定位算法有效地解決了無人機定位問題,并結合圖像處理算法完成了架線弓檢測,極大程度地提高了自主架線的成功率和效率。
通過模擬測試及實驗驗證,基于地面站輔助的無人機自主架線系統能夠高效穩定地執行電力架線任務,架線任務規劃算法、融合定位算法和架線弓檢測算法等均能夠達到設計要求,且無人機與地面站能夠實時通信,既保證了無人機作業效率及成功率,又實現了無人機的自主避障,具有較高的安全性。綜上,所提出的無人機自主架線系統高效可靠,可在實際中推廣應用。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12