
基于SLAM技術的地下暗渠探測方法
2022-11-04 05:50:22朱德才吳凱華
北京測繪 2022年10期
關鍵詞:作業
彭 浩 朱德才 吳凱華
(廣州市城市規劃勘測設計研究院, 廣東 廣州 510060)
0 引言
河涌治理工作是大力推進生態文明建設的工作重點,河涌主要有兩種:地表河涌和加蓋河涌。地表河涌暴露地面之上,治理較為直觀,加蓋河涌也稱為暗渠(下簡稱暗渠),在大城市中較為常見。由于城市發展加劇河涌污染,為減少污染對城市感官的影響,不少地區直接將河涌加蓋變成暗涌,是河涌整治初期的產物[1]。隨著社會的精細化管理需求,清楚地探測暗涌走向、邊線、埋深等屬性是暗渠治理或改造的關鍵所在。
1 現有技術背景
暗渠歷史悠久,早期建設資料難尋,道路狹窄,部分地方交通繁忙,地下管線空間緊張,使得探測難度大幅增加,國內目前主要使用的探測方法:明挖法、三維激光掃描法、管道潛望鏡檢測法、閉路電視探測法[2]、蛙人潛入式方法及新型智能管涵檢測機器人[3]等方式。明挖法施工及影像較大,本文不予采納;智能管涵檢測機器人目前尚不成熟,由于部分暗渠水量很低,淤積較多,檢測船難以前進,經試驗不予采納;閉路電視用于探測管道內影像資料,無法獲得準確坐標信息。
本文采用的方法有如下幾種:
(1)管道潛望鏡探測是一種進行管道快速檢測的方法[4],利用可調節長度的手柄將高放大倍數的攝像頭置于打開的暗渠窨井中,通過旋轉伸縮桿,記錄管渠中管道的實際情況。通過管道探測鏡判斷暗渠流向,以井蓋為拐角點,根據開井處測量暗渠寬度、深度等信息,以暗渠寬度基本一致,埋深線性變化為規律初步畫出暗渠邊線[4]。此種作業方式存在如下問題:①對于無井蓋區域或者井蓋之間出現非直線暗渠極易出現誤判;②暗渠寬度基本一致或埋深線性變化的規律,并不適合于所有情況(如暗渠寬度、埋深驟變,暗渠小口接大口或者暗渠一分為二等情況)。由于可視化特征,適用于迅速直觀地判斷暗渠走向,通過相對位置判斷暗渠邊線,精度較低,可作為一種定性的手段。
(2)地質雷達探測是一種適于在城市開展的地球物理探測方法,在城市淺層勘探中取得了良好效果。此技術的作用在于通過雷達發射波紋特征,來判斷暗涌邊線位置、邊壁厚度[5-7],結合管道內窺鏡方式,確認邊線和走向的正確性。此種方法隨著暗渠埋深的加大易出現粗差,對于埋深較深的暗渠,探測能力較差,內業數據處理較為復雜,地表需平整(具備作業環境),適用環境受到限制。
(3)蛙人潛入式探測方法是一種人工穿戴專業潛水服,通過暗渠開口處或井蓋處下潛,人工布設金屬導線至暗渠邊緣,通過地面電磁探測設備獲取暗渠邊線的方法。此方法探測距離遠,細節豐富,精度相對較高,但由于暗渠水深普遍隨暴雨天氣變化,暗渠水流較急,淤積嚴重,內有刺激性或有毒氣體,測量危險性較大[8];且部分暗渠空間狹小,蛙人無法下井作業,故投入的人力、物力較多,對安全生產方面也有有較高的要求。
2 新技術作業方法
根據上述應用場景特點,綜合考慮優劣勢,提出一種以基于同步定位與繪圖(simultaneous localization and mapping,SLAM)激光掃描技術為主的作業方式,可在移動過程中采集數據[9-12],能適應絕大部分暗渠探測的環境需求。基于SLAM技術的三維激光掃描技術,能在快速移動中獲取場景的高精度特征點位[13-16],本方法采用SLAM掃描儀搭配連接桿,可適應于人無法進入的復雜場景情況,無須傳統的蛙人下井作業,避免了人員傷害和儀器財產損失的事故;相對精度較高,大大提高了測量效率;在同樣作業周期內提供的信息量較傳統作業方式劇增,為水環境治理工作提供了重要基礎數據,也為后期暗渠運維工作提供強大技術支撐,具體技術方案見圖1。
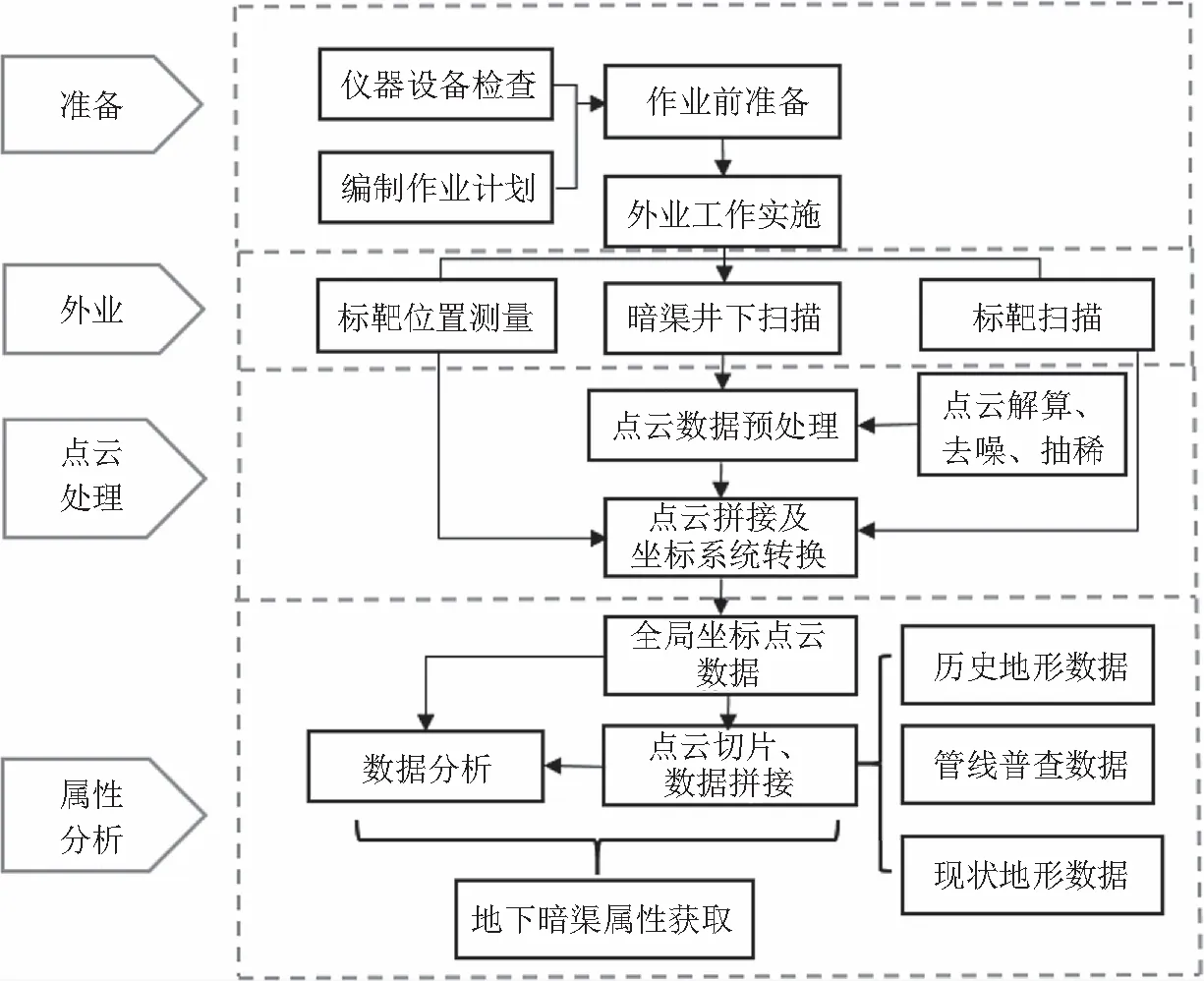
圖1 技術方案流程
3 項目實踐
3.1 項目概況
根據廣州市總河長令要求,全面消除黑臭小微水體,以排水單元劃分為抓手,做好單元內雨污分流和合流暗渠升級改造工作,其中地下暗渠屬性探測是工作重點。天河區全域范圍約137 km2,地下暗渠里程約120 km,暗渠形態多樣,地表環境復雜(部分跨房、路、橋等情況),對探測手段提出了新的要求。
3.2 項目準備
本項目采用GEOSLAM zeb-horizon手持式三維激光掃描儀,測程100 m,掃描噪音3 cm。搭配自制連接桿,可深入井底采集特征點位信息。
考慮到探測對象不可視特性和SLAM激光掃描本身技術要求,作業前準備主要分為以下三個部分:①搜集測區現有暗渠走向、井蓋位置資料;②搜集測區現有地形圖資料;③根據已收集暗渠井蓋資料,結合地形圖,制定作業計劃(布設控制點位置和SLAM掃描儀外業采集路線)。
3.3 項目外業
根據項目所采用SLAM掃描儀技術特點,單次掃描時長受限(單次掃描時長不宜大于20 min),單次掃描點云配準至少需4個標靶點(控制點精度自檢,便于后續點云整體配準工作),需提前安排好掃描路線,避免出現掃描時長超限或者標靶點過少、分布不均勻等情況,提高作業效率。
3.3.1標靶點測量
SLAM激光掃描儀所輸出點云數據需采用地面設置標靶點方式,將點云轉換至廣州2 000坐標。項目采用廣州連續運行參考站(Guangzhou continuously operating reference stations,GZCORS)技術測量標靶點三維坐標,需注意的是標靶點需在掃描范圍內均勻布置,嚴禁分布成一條直線,影像點云配準結果。
3.3.2目標掃描
外業工作由5人小組具體負責。其中,2人負責SLAM激光掃描儀操作,1人負責前行開井蓋便于掃描,1人負責后行關井蓋避免安全事故,剩余1人負責在已布設控制點位上放置標靶紙及回收標靶紙。
按照計劃掃描路線前進,負責開井、關井人員還需注意掃描范圍內不可預估危險因素,在公路邊、跨橋、人群嘈雜區域,需認真做好作業標志,避免點云成果中噪聲過多或發生安全事故。
具體采集過程中注意事項如下:①按照計劃路線勻速前進,掃描儀頭部探入井口需緩慢、謹慎,避免SLAM算法解算出錯造成外業返工;②掃描儀探頭深入井下后需停留15~20 s,充分采集井下特征信息后緩慢拉起;③在每個掃描段中盡量有4個及以上標靶點坐標,若受限于環境無法滿足,則相鄰兩端盡量重復掃描部分區域,通過點云拼接方式將兩段點云合并成一段再行配準。
3.4 內業數據處理
內業數據處理包括點云去噪、抽稀、點云配準、點云拼接等步驟。
3.4.1點云解算
通過將設備原始文件導入三維掃描儀數據處理軟件(GEOSLAM HUB)中,設置合理解算參數,輸出通用格式點云數據(.LAZ或者.LAS)。
基于SLAM算法和采集數據的特殊性,對相鄰時態數據的判斷易出現偏差,導致點云解算結果呈現錯層、扭曲、重疊或解算失敗的現象。基于上述現象,可采用如下方式處理:
(1)調整解算軟件的算法參數。①收斂閾值,增加閾值即增加了SLAM算法試圖匹配重疊區域內數據的次數,對于采集數據過程中出現漂移現象合適;②解算立體像素密度,控制SLAM使用的解算像素的大小,在狹窄隧道的洞穴和礦井中,調大立體像素密度,以便更多的細節可以在近距離使用;③IMU和SLAM算法的權重,若數據在移動過程中速度較快或場景中特征點較小(建筑物走廊、隧道等)可將權重向IMU算法傾斜。
(2)舍棄部分錯誤數據。SLAM的算法處理相鄰兩幀點云的重合、變換,基于迭代就近點法(iteration closet point,ICP)實現兩幀點云的配準。由于存在點云漂移,導致點云解算結果出現偏差,一般集中在部分時間段內,可從解算參數上設置剔除某個時刻之后的數據,最大限度上利用數據,避免返工。
(3)外業補測。對于上述方法嘗試均未果的情況,則需外業返工重新采集數據。
3.4.2點云去噪、抽稀
為獲得更純凈的點云數據,提高內業作圖精度,需對解算點云去噪、抽稀處理。去噪、抽稀功能集成在軟件內,去噪效果如圖2所示。
(a)去噪前 (b)去噪后
3.4.3點云配準
通過上述軟件解算、去噪、抽稀生成的三維點云模型需通過標靶點將其轉換至廣州2000坐標系下,便于暗渠邊線等屬性分析。標靶點通過反射強度與一般地物區分開,利用第三方配準軟件(Realworks等)將標靶點坐標刺入[17],形成廣州2000坐標系下的點云數據。
3.5 屬性分析及數據成果
地下暗渠屬性主要包括流向、邊線位置、埋深、接口等信息。以已配準點云數據為主,結合歷史地形圖、現有管線普查數據進一步核實,形成標注屬性的二維線劃圖,如圖3所示。

(a)點云
將上述采集暗渠信息按照數據結構入庫,以屬性表形式記載信息,形成數據庫成果。
3.6 精度檢測
由于地下暗渠不可視,對于兩端暴露出入口可采用量數、全站儀采集特征點判斷暗渠屬性精度指標,對于中段不可視區域,一般通過地上房屋邊長、角點與碎部點采集數據和丈量房屋邊長數據對比,以此判斷地下暗渠精度情況。由圖4可知,特征點位中誤差為0.12 m,邊長較差中誤差為0.05 m,完全滿足地下暗渠探測項目需求。
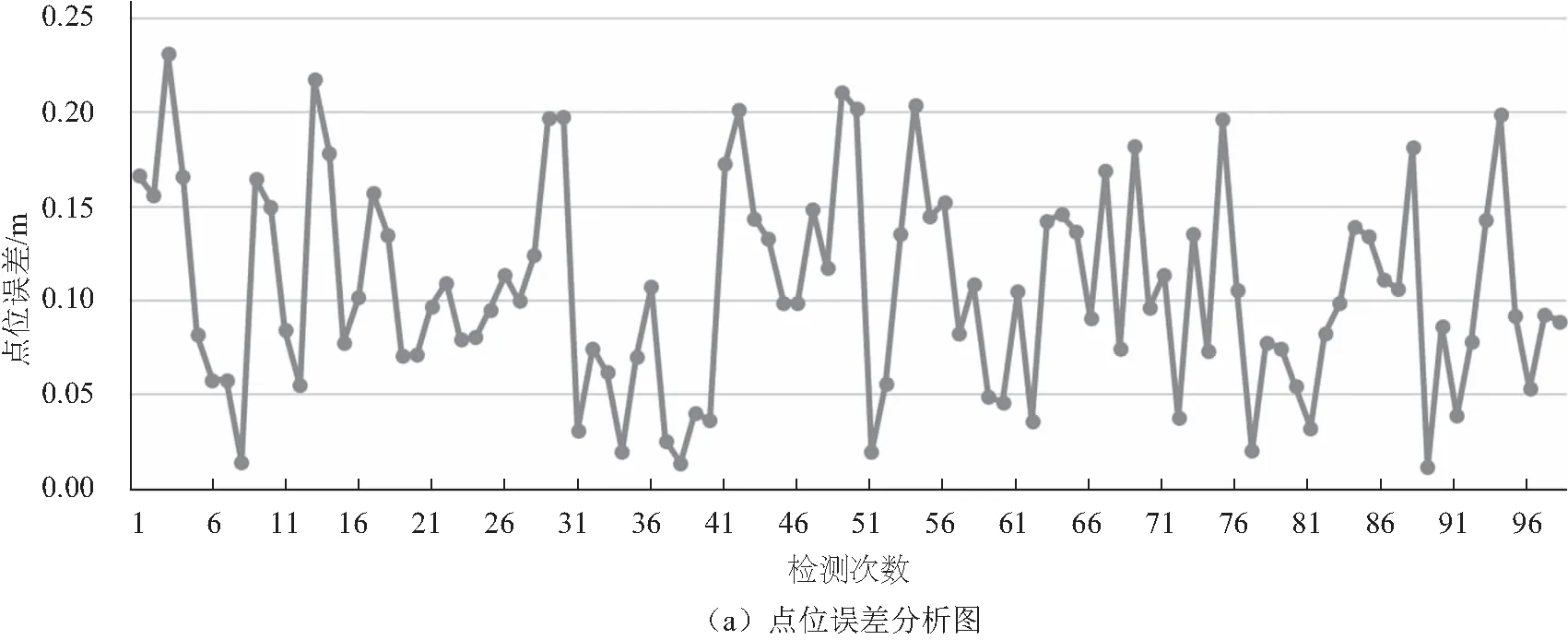
圖4 暗渠摸查精度分析
4 適用性分析
城市暗渠探測主要存在以下困難:①暗渠周邊環境復雜,部分存在非法搭建、不正當施工現象影響探測;②部分暗渠埋深大、弧度轉角、瀑布型轉角等情況復雜;③暗渠寬度、凈空不一,大部分暗渠缺乏人工進入條件。
基于SLAM三維激光掃描技術的作業方式,對比QV鏡探測、地質雷達探測、蛙人潛入式探測等方法可最大限度地提高探測效率,降低人工成本,更適應地下暗渠狹小、深埋等人不可進入的作業環境;經檢測,特征點位中誤差為0.12 m,邊長較差中誤差為0.05 m,能完全項目需求;一次性采集渠箱內部特征信息,快速捕捉暗渠接口,為監管部門后續暗渠改造、水環境治理提供基礎數據。
5 結束語
基于SLAM三維激光掃描技術作業方式,可在移動過程中采集數據,通過外配連接設備,能深入人不可達、狹小等區域,能適應絕大部分暗渠探測的環境需求。同時也存在如下問題望后期解決。
(1)對相鄰時序狀態的識別和整個場景的回環檢測誤差,是SLAM掃描的技術要點,針對地下暗渠場景單一、重復、特征性不強等特點,易發生誤判或解算失敗的情況,往往需要外業返工采集數據,影響效率。
(2)激光掃描測程有限(此項目所用設備測程100 m),目標越遠點云越稀疏,對于長段無井蓋或大范圍房屋壓蓋的地下暗渠,需依靠多種探測手段結合多源資料綜合判斷,必要時需采用人工開挖方式制造井蓋,上述方式成本高、工期長、存在一定的協調難度。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
