基于Kalman濾波的改進灰色模型在基坑變形監測中的應用
2022-11-08 11:22:10劉國超彭衛平朱曉強
城市勘測 2022年5期
劉國超,彭衛平,朱曉強
(1.廣州市城市規劃勘測設計研究院,廣東 廣州 510060; 2.廣東省城市感知與監測預警企業重點實驗室,廣東 廣州 510060)
1 引 言
隨著城市化進程的快速推進,大城市人口規模的快速增加,使得城市土地愈發緊張,建筑設計向上要空間,使得樓層越來越高,基坑越挖越深,建筑規模越來越大,隨之而來的工程沉降、工程塌陷問題愈發突出。高層建筑一般位于城市核心地帶,基坑規模大,周邊環境復雜,施工引起的沉降問題不容忽視,如果發生險情可能引發投資增加、工程安全或人員傷亡等一系列問題。基坑監測作為驗證基坑設計、保護基坑施工的主要手段,可以直觀反映基坑在各種施工工況、巖土體卸荷載狀態下的變化情況,通過對監測數據的分析和預測,可以為后續設計和施工提供有益指導[1]。
基坑監測數據由于其離散性、高噪聲等特點,使得監測數據呈現一定的波動性、隨機性,為了對基坑的穩定狀態及變形趨勢做出更加準確的分析,國內外學者做了很多有益嘗試。文獻2中介紹了新陳代謝GM(1,1)模型在建筑物沉降數據預測中的應用,相比于傳統的GM(1,1)模型和多項式擬合模型,精度提高明顯[2];文獻3中建立了基于卡爾曼濾波的灰色理論預測模型,利用迭代濾波理論和LevenbergMarquardt優化濾波,有效提高了預測精度[3];文獻4中系統闡述了自適應卡爾曼濾波在變形監測數據處理中的應用,并探討了不同自適應卡爾曼濾波模型的不同應用領域[4];文獻5中詳細討論了離散線性系統的卡爾曼濾波模型建立及精度評定,并將其應用于大壩動態變形監測中[5]。以上探索和嘗試,為變形監測分析和預測提供了豐富工具,本文擬采用Kalman濾波+新陳代謝GM(1,1)模型組合方式,利用Kalman濾波對原始監測數據濾波消噪,并結合新陳代謝GM(1,1)模型對變形趨勢項進行建模分析,來預測變形趨勢。結合實際案例分析,基于Kalman濾波的新陳代謝GM(1,1)相比于傳統的單一GM(1,1)、ARMA模型[6-7],有效降低了觀測噪聲影響,并具有更高的預測精度。
2 基于Kalman濾波的新陳代謝GM(1,1)模型
2.1 Kalman濾波模型
Kalman濾波是一種利用線性系統狀態方程,對系統狀態進行最優估計的一種算法,能有效剔除測量數據中隨機擾動誤差,得到接近真實情況的測量數據。其數學模型包括狀態方程(也稱動態方程)和觀測方程兩部分:
Xk=Φk/k-1Xk-1+Wk-1
(1)
Lk=HkXk+Vk
(2)
式中,Xk是tk時刻系統的狀態向量;Lk為tk時刻系統的觀測向量;Φk/k-1為時間tk-1至tk的系統狀態轉移矩陣;Wk-1為tk-1時刻的動態噪聲;Hk為tk時刻的觀測矩陣;Vk為tk時刻的觀測噪聲。
離散的線性系統Kalman濾波遞推公式為:
狀態預報:
(3)
狀態協方差陣預報:
Pk/k-1=Φk/k-1Pk-1+Qk-1
(4)
狀態估計:
(5)
狀態協方差陣估計:
Pk=(I-KkHk)Pk/k-1(6)
其中,Kk為濾波增益矩陣,其具體形式為
(7)

2.2 GM(1,1)模型
灰色模型是通過少量的、不完全的信息,建立數學模型并做出預測的一種方法,是黑箱概念的推廣,通過分析系統各因素之間是否具有確定關系來區別白色與黑色系統,進而建立數學模型,并做出預測。
設觀測原始序列:
x(0)={x(0)(1),x(0)(2),x(0)(3),…,x(0)(N)}
對x(0)作一次累加生成(1-AGO),得到:
(8)
從而獲得生成序列:
x(1)={x(1)(1),x(1)(2),x(1)(3),…,x(1)(N)}
設x(1)滿足:
(9)
其中,常數u稱為發展灰數,a為內生控制灰數,是對系統的常定輸入。通過最小二乘估計可得:
(10)
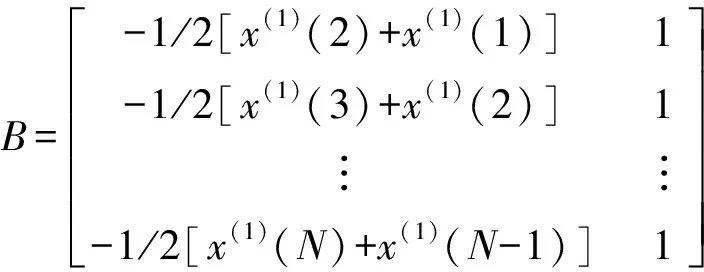

(11)
2.3 Kalman濾波與GM(1,1)模型組合及算法實現
Kalman濾波能有效剔除測量數據的隨機項,得到接近真實情況的測量數據;新陳代謝GM(1,1)模型可以對監測數據趨勢項進行建模,以預測變形趨勢。本文擬采用Kalman濾波+新陳代謝GM(1,1)模型組合方式,利用Kalman濾波對原始監測數據濾波消噪,并結合新陳代謝GM(1,1)模型對變形趨勢項進行建模分析,來預測變形趨勢。
首先采用Kalman濾波對監測數據進行濾波,剔除監測數據中的隨機擾動誤差,然后對剔除了隨機項的監測數據進行GM(1,1)建模。針對灰色系統隨時間推移,預測精度與可靠度不斷下降的問題,本文擬通過將已經獲取的最新已知信息引入模型,淘汰作用弱的信息,淡化灰平面的灰度,以降低模型精度的損失,準確反映系統狀態。
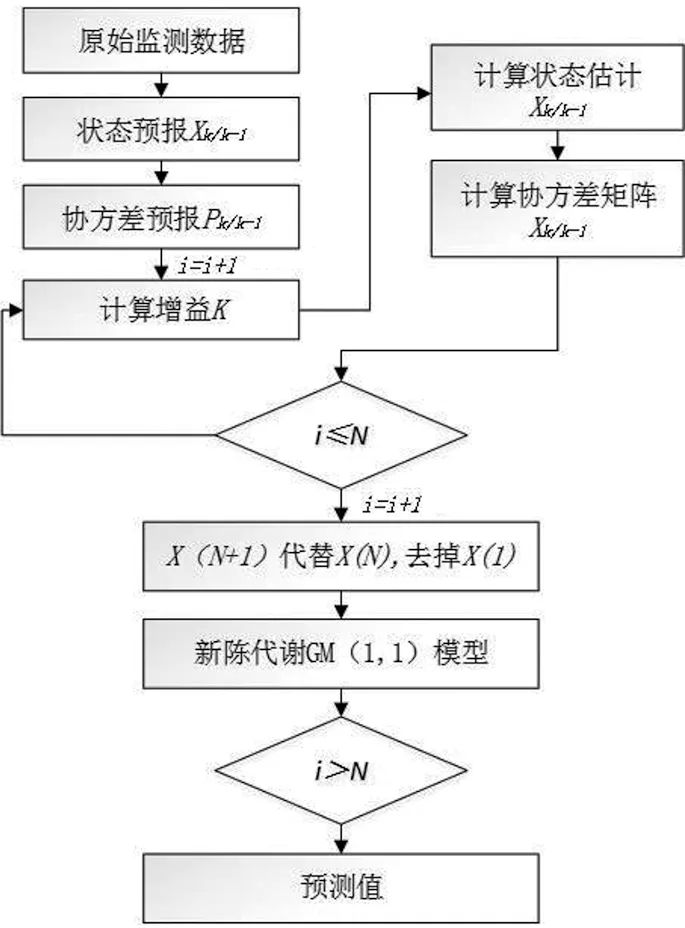
圖1 基于Kalman濾波的改進灰色模型算法流程
3 算例分析
廣州城區某高層建筑,基坑周長約 600 m,開挖深度 16 m,基坑等級為一級。為監測基坑施工過程中的變形情況及周邊影響,在基坑及周邊建筑布設若干監測點,本文選取基坑樁頂某豎向位移監測點14期數據作為實驗數據,通過前10期數據建立模型,預測后4期數據,并與實際監測數據對比,其中每期監測間隔為7天,監測數據如表1所示。

表1 某監測點部分沉降數據
這里選取前4個數據為觀測值,定△t=1,組成法方程進行動態平差,采用線性擬合y=a0+a1x+ε,得到狀態協方差陣和狀態估計參數。利用上面的遞推預報與濾波公式可得到監測點的濾波值,如表2所示:
由表2可知,卡爾曼濾波通過建立狀態方程和觀測方程來描述系統的動態過程,依據濾波增益矩陣的變化,從監測數據中定量提取有效信息,修正狀態參量,從而補償噪聲對數據的影響,有效提高數據處理精度。以濾波值為基礎,建立新陳代謝GM(1,1)模型,并預測后4期數據,并分別對于傳統GM(1,1)模型、ARMA模型進行對比,結果如表3所示。
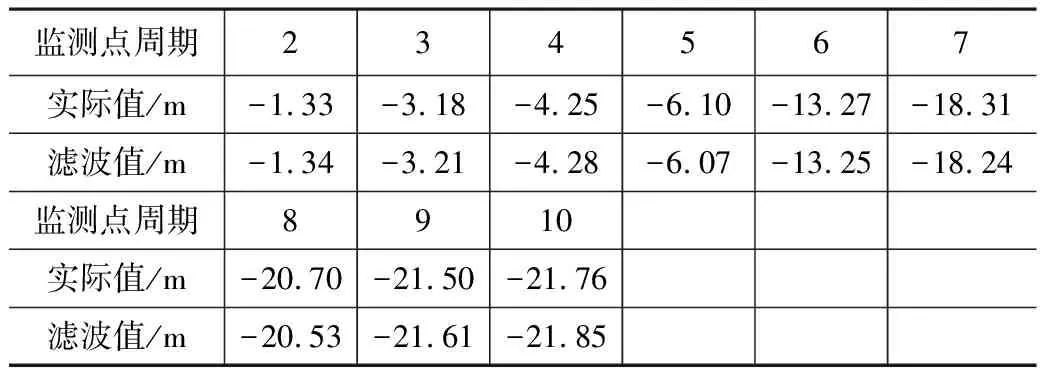
表2 Kalman濾波值與預測值

表3 基于Kalman濾波的改進GM(1,1)與傳統GM(1,1)、ARMA預測值比較
由表3,圖2可知,經卡爾曼濾波處理后的改進GM(1,1)模型具有更高的預測精度,能更好地反映變形趨勢,相比于單純GM(1,1)模型和ARMA模型精度更高。
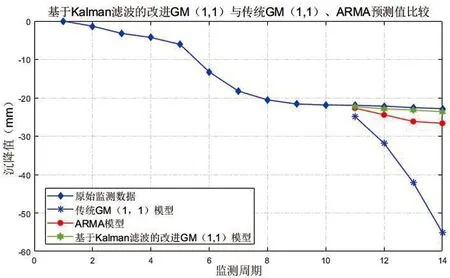
圖2 基于Kalman濾波的改進GM(1,1)與傳統GM(1,1)、ARMA預測值比較
由表4可知,對比三種模型的預測值、殘差值的均方差及中誤差,基于Kalman濾波的新陳代謝GM(1,1)相比于傳統的單一GM(1,1)、ARMA模型,有效降低了觀測噪聲影響,并具有更高的預測精度。
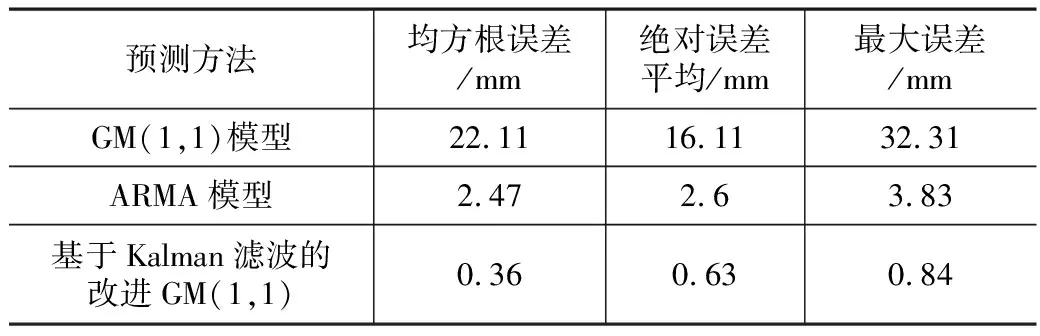
表4 三種模型預測精度對比
4 結 論
卡爾曼濾波通過建立狀態方程和觀測方程來描述系統的動態過程,依據濾波增益矩陣的變化,從監測數據中定量提取有效信息,修正狀態參量,從而補償噪聲對數據的影響,有效地提高數據處理精度,結合新陳代謝GM(1,1)模型對變形趨勢項進行建模分析,來預測變形趨勢。相比于傳統的單一GM(1,1)、ARMA模型,有效降低了觀測噪聲影響,并具有更高的預測精度。但是在使用上述模型時,也要注意以下幾點:
(1)Kalman濾波初始值的選取很關鍵,錯誤的初始值不能很好反映數據變化趨勢;
(2)Kalman濾波的優勢在于能實時反映數據變化狀態,并通過新數據來更新狀態方程,通過增益矩陣來控制觀察數據噪聲的影響,對提高數據預測精度有很好的效果;
(3)新陳代謝的GM(1,1)模型通過加入新的已知信息,剔除舊的無效信息,來提高預測精度,但也易受到突變信息、粗差信息干擾,導致預測不準。使用模型時,需對新加入的數據做一定的判別和分析。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
