大視場大靶面長波無熱化光學系統設計*
2022-11-09 07:28:00江傳富
艦船電子工程 2022年8期
江傳富 高 燾
(海裝駐武漢地區第七軍事代表室 武漢 430033)
1 引言
無論是船舶或是汽車,大視場都能為駕駛者帶來安全與方便,基于此應用,大視場的駕駛輔助設備廣角鏡頭從誕生至此已經有了長足的發展。輔助駕駛廣角鏡頭主要有以下特點[1~2]:第一,能觀察到更多的景物,減小盲區的存在;第二,擁有更深的景深,能夠同時觀測由近及遠的目標;第三,有較大的負畸變,邊緣視場形成彎曲的圖像;第四,一般為無熱化鏡頭,滿足高低溫不同環境下的使用條件;第五,邊緣視場具有較低的照度[3]。本文根據現實工程需要,設計了一款大視場大靶面非制冷長波紅外無熱化光學系統。系統結構形式常規,工藝簡單,在較大的溫度范圍內,成像質量優異。
2 設計特點
2.1 無熱化
隨著溫度的變化,光學系統的相應參數也會發生變化,導致系統像質下降。目前常用的無熱化設計方法主要有幾種,分別是機電主動補償法、機械被動補償法和光學被動補償法[4],其中光學被動補償法沒有任何機械運動結構、不需要不同材料的匹配,是實現無熱化較理想的方法。
本文采用光學被動補償坐標法設計。坐標法無熱化設計由Tamagawa等[5]提出,圖1中展示了不同材料的熱差/色差圖,任意三種材料的坐標點在圖中都可以組成大小不一的三角形,稱為無熱化三角形,無熱化三角形的形狀越飽滿,光學設計的無熱化效果越好,根據這個設計原則,選擇了硫化鋅、硒化鋅、IRG206三種材料組合消熱差。
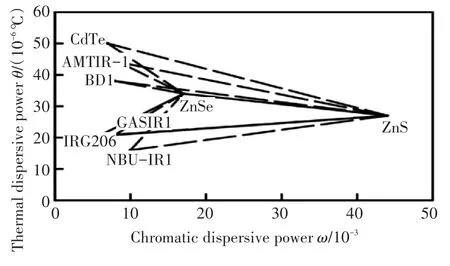
圖1 不同光學材料在8~12um波段的ω-θ圖
2.2 大視場鏡頭像面照度計算
目前在國內的光學教材和通用光學設計軟件(CODEV和ZEMAX)中[6],邊緣視場相對照度都會使用式(1)計算:

其中Eω為邊緣視場,E0為中心視場,ω′為像方視場角。
公式的成立是有條件的,即出瞳處無像差且系統無軸外光束漸暈、將光學系統的出瞳當作朗伯輻射源。光學系統的光經過透鏡后,已經有了明顯的方向性[7],不再滿足朗伯光源的特點,因此現有光學照度公式已不再適用。
在討論新照度公式之前,做如下假定:1)系統物面為平面;2)系統為無限共軛系統,物距在無窮遠;3)系統入瞳不隨視場增大而改變;4)物面發光強度滿足朗伯條件;5)物方和像方都處于空氣中。這5個條件的設置,主要目的在于剔除一些不在討論范圍內的鏡頭,對于大多數成像物鏡,都滿足以上5個條件。
如圖2所示,物方系統各個視場的面元輻射的光束經過入射窗,到達系統的第一光學面,在光束進入系統之前,符合朗伯光源的特性,光束進入光學系統,經過孔徑光闌,出射窗,最終成像在像面上。入射窗和出射窗具有相同的作用,即產生漸暈,為了簡化計算,此處未畫出出射窗。

圖2 光學系統成像簡化模型
物面距光學系統第一面的距離為L,物方軸上面元ds0對應像方軸上面元,物方軸外面元dsω對應像方軸外面元,鏡頭焦距為f',L?f',物面發光亮度η,對于物面ω視場角的微小面元dsω,輻射光強為Iω=ηdsωcosω,輻射距離為L/cosω,軸外視場光束在第一光學面的照射區為?ω,?ω法線與物方軸外面元dsω中心的相連的夾角為θω,如圖3所示。
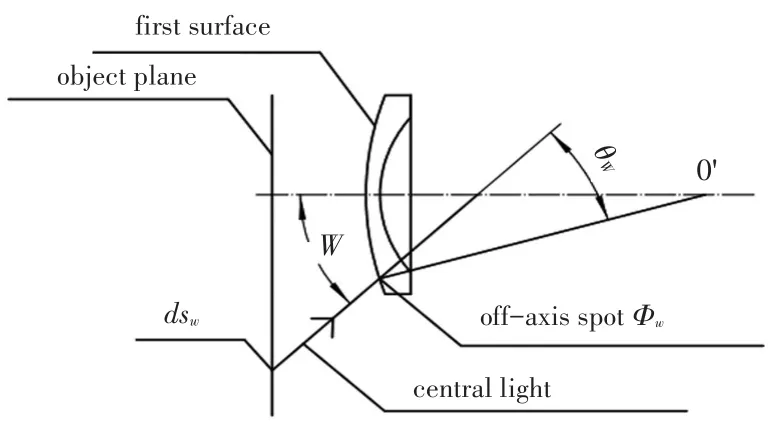
圖3 光學系統第一面照射區示意圖
?ω在矢徑方向的的有效面積為?ωcosω,?ω相對軸外面源dsω中心的立體角為

軸外照射區?ω接收到的光通量為

軸外光束經入射窗攔截后,產生漸暈,Dω為軸外光束在入瞳平面上垂直于光軸方向的寬度,D為入瞳寬度,加入漸暈修正系數,設系統透過率為τ,根據物像共軛關系,軸外像面元接收到的光通量為


設系統放大倍率為β,像面元照度可表示為

對于軸上光束來說,ω和θω都為0,Dω=D,軸上面元的照度為

軸外面元與軸上面元照度之比,即相對照度為

從公式中可知,相對照度與線漸暈系數的平方稱正比,與軸上、軸外視場在光學系統第一面的照射區域成正比,與光學系統第一面照射區中心法線和入射主光線的夾角余弦成正比[8],與物方視場角余弦的3次方成正比。具體到本文設計的光學系統,共軛方式、物方視場角、F數等參數已經確定,此時物方視場角已經確定,cos3ω為定值,為提高軸外相對照度,應減小漸暈或引入一定的負漸暈,同時盡量減小光學系統第一面照射區中心法線和入射主光線的夾角。
3 光學系統設計
3.1 設計參數
根據輸入,光學系統的各項技術參數如表1。

表1 系統各項技術參數
3.2 設計結果
經過優化,合理分配透鏡光焦度,系統最終結構形式如圖4所示。

圖4 光學系統圖
系統共采用了五片透鏡,材料分別為硒化鋅、IRG206、硫化鋅、IRG206、硫化鋅,第1片透鏡為負光焦度,后4片組合為正光焦度,整體組合為反攝遠結構,考慮到后組承擔更多的像差校正,所以后組采用了更多數量的透鏡。
3.3 性能分析
3.3.1 調制傳遞函數
光學系統在-30℃、20℃、65℃下的調制傳遞函數如圖5所示,從圖中可知,在空間頻率36mm/lp時,三個溫度下,光學系統軸上點調制傳遞函數都大于0.25、0.7視場調制傳遞函數都大于0.15、1視場調制傳遞函數都大于0.1,滿足使用要求。
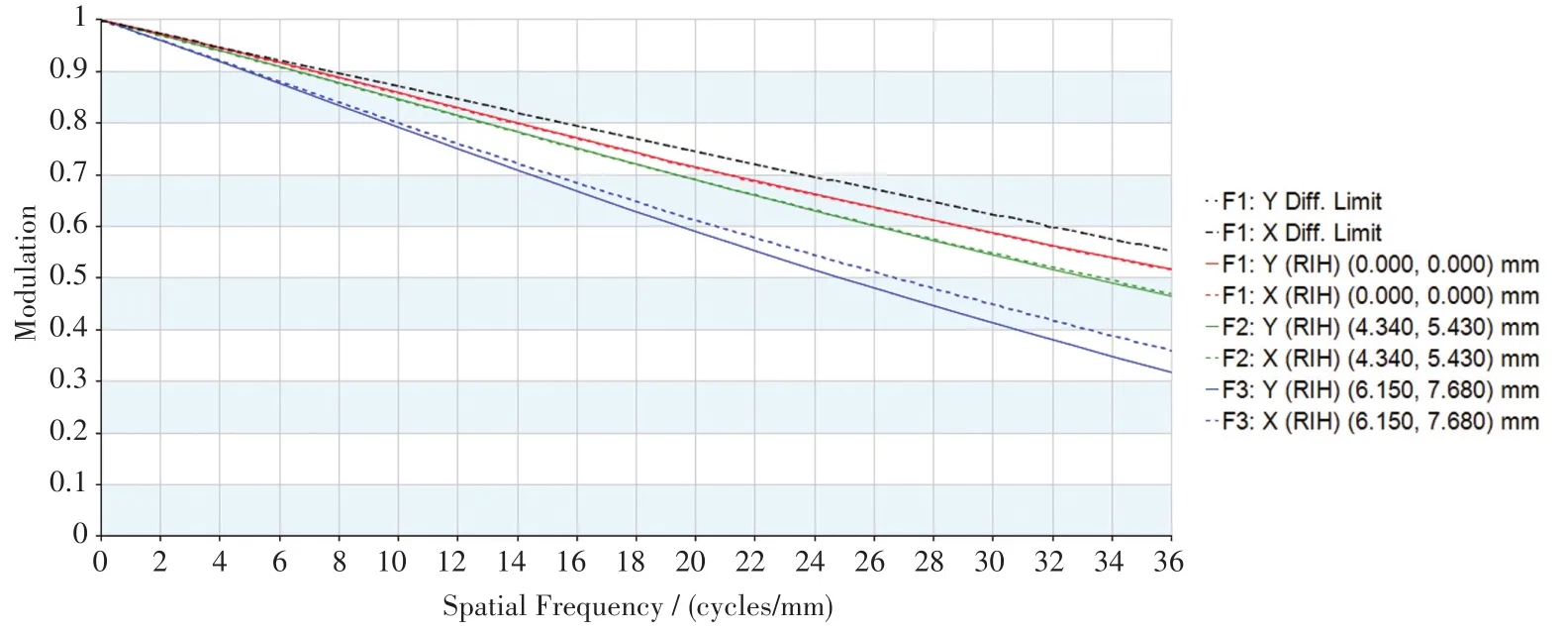
圖5 溫度65℃的傳遞函數
3.3.2 像面照度
基于分析,據式(8)對像面照度進行仿真分析,(Dω/D)2、cosθω和 (?ω/?0)都可由光線追跡計算。將各個值的計算結果帶入式(8)對像面照度進行仿真分析,像面照度仿真圖如圖6所示。
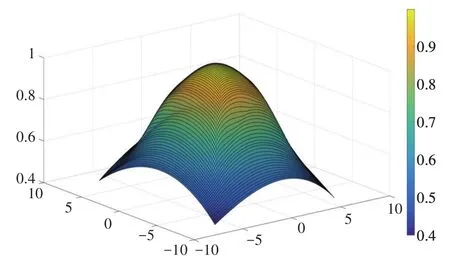
圖6 像面照度仿真圖
使用CODEV軟件自帶分析工具,采用cos4ω,公式計算的邊緣照度約62%,而使用真實光線追跡仿真的計算方式,邊緣照度約41%,有比較大的差異。根據一般經驗,紅外廣角鏡頭的邊緣照度大于40%才能不影響使用[9],本設計滿足使用要求。
3.3.3f-θ曲線
廣角鏡頭物像理論上滿足f-θ曲線[10],對于觀察成像系統,一般要求f-θ誤差不超過5%,系統f-θ誤差如圖7所示,橫坐標為視場,縱坐標為誤差數值,最大誤差約4.2%,滿足使用要求。
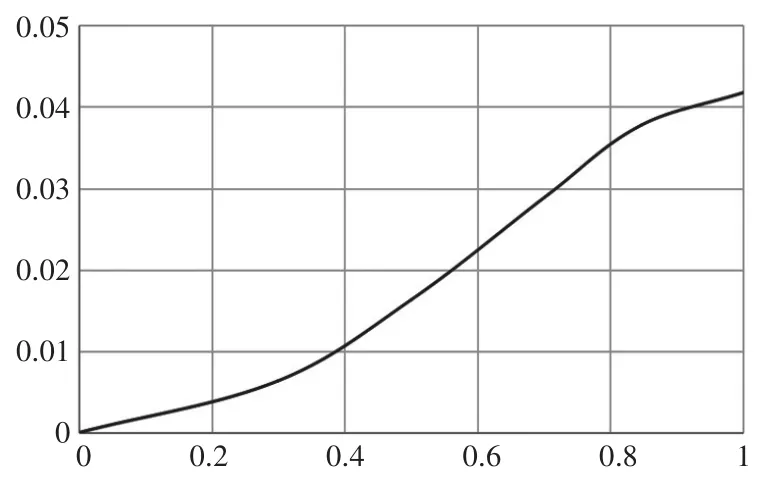
圖7 f-θ誤差
3.3.4 公差分析
為保證鏡頭加工、裝配的合理性,采用常規加工精度,分析系統公差,系統公差圖如圖8所示。
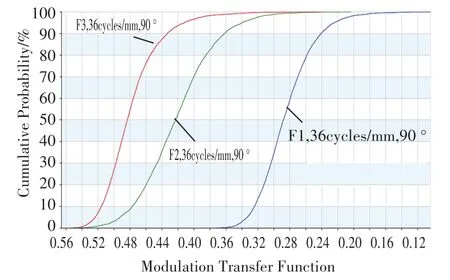
圖8 公差圖
由圖可知,系統公差不敏感,滿足使用要求。
4 結語
本文設計了一種非制冷型長波紅外無熱化光學系統。系統光學總長60mm,體積較小,采用了反攝遠結構,減小了f-θ曲線的誤差,通過多種光學材料合理搭配,實現了在-30℃~+65℃的工作溫度范圍之內消熱差,分析了大視場光學系統像面照度不足的問題,推導出了新的像面照度公式,針對本設計,對像面照度進行了仿真,像面照度滿足使用要求,達到了設計目的,對同類型的光學系統設計,具有借鑒意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17