脈沖星導航在載人火星探測中的應用
2022-11-09 04:21:10李治澤李連升王奕迪宋敏章
載人航天 2022年5期
鄭 偉, 李治澤, 李連升, 王奕迪, 宋敏章
(1.國防科技大學空天科學學院空天工程系, 長沙 410073; 2.北京控制工程研究所, 北京 100190)
1 引言
在人類太空探索的第二個50 年,火星探測正成為國內外航天領域研究的熱點方向。 開展載人火星探測是火星探測技術發展的必然趨勢。 2020年,中國首次火星探測任務天問一號的成功發射,使中國成為世界上第二個獨立掌握火星著陸巡視探測技術的國家,也為未來載人火星探測的開展奠定了基礎。 目前ESA、SpaceX 公司等提出了載人火星探測計劃,但均未能成功實施。 這表明載人火星探測技術是當今世界高科技中極具挑戰性的領域之一。
與近地軌道任務相比,火星探測面臨飛行時間長、通信距離遠、地面測控時延長、空間環境更加復雜以及30 d 左右通訊中斷的日凌時間等問題,增加了火星探測器制導、導航和控制的難度[1-2]。 其中,日凌干擾現象,即當太陽運行到地球和火星探測器之間時,太陽發出的強烈電磁波會對無線電通信產生干擾,探測器將無法與地面建立聯系。 在載人探測情況下,日凌干擾是無法接受的,為保障航天員的生命安全,需要在與地面通訊中斷后仍具有能確定航天器大概位置及應對突發狀況的保底手段,這對載人探測器在軌運行的自主性提出了更高的要求[3]。
根據在軌觀測天體的不同,目前行星、深空探測器的天文導航方法主要分為:基于太陽或行星觀測的自主導航方法[4-5];基于小行星觀測的自主導航方法[6-8]以及基于X 射線脈沖星觀測的自主導航方法[9-11]。 其中,通過觀測太陽、行星及小行星的導航方法技術比較成熟,多次成功應用于行星探測任務中。 但在導航過程中,其導航精度會隨探測器與觀測目標之間距離的增加而降低。基于太陽或行星觀測的方法,由于觀測目標距離探測器相對較遠,星敏感器角度測量的微小誤差就會導致巨大的導航位置誤差;而基于小行星觀測的方法,其導航精度受到原理及測量儀器的制約,目前還難以滿足載人探測的需求。
雖然基于X 射線脈沖星觀測的自主導航方法受限于當前X 射線導航終端技術發展水平的限制,存在導航精度相比其他方法不突出的問題,但仍然是應用于載人火星探測的有效自主導航手段,且潛力巨大。 隨著一系列X 射線脈沖星導航試驗計劃的開展與實施,如:美國國防高級研究計劃局(Defense Advanced Research Projects Agency,DARPA)提出的XNAV(X-ray Navigation and Autonomous Navigation Verification)研究計劃、ESA制定的深空探測器脈沖星導航研究計劃、NASA空間站X 射線計時與導航技術實驗室開展的SEXTENT 項目[12]等以及國內脈沖星試驗01 星(XPNAV-1)、慧眼HXMT 衛星的發射成功,基于X 射線脈沖星的深空探測器自主導航方法得以進一步的研究與應用。 同時,國內外研究人員提出了多種自主導航方法,包括利用X 射線脈沖星信號對航天器位置、速度及姿態等的解算[13-15],基于實測數據引入動態信號處理的導航方法以及多種組合導航算法[16-18],并進行了仿真,取得了一定的研究成果。 在利用X 射線脈沖星觀測量為執行火星探測任務的飛行器提供自主導航服務方面也開展了相關研究,包括相關時空基準的定義和轉換,火星探測器軌道模型、脈沖星導航觀測模型及相關濾波算法的研究等內容[19-20]。
本文在分析載人火星探測任務對自主導航迫切需求的基礎上,結合工程應用可能面臨的實際問題,分析了脈沖星導航的應用優勢,在脈沖星導航載人探火系統的X 射線星載探測器及星載處理系統方面給出了初步的設計方案,并提出了一種基于單探測器序貫觀測的X 射線脈沖星高精度自主導航方案。 方案構建了基于單探測器的脈沖星導航系統的觀測模型,基于現有的空間觀測數據分析了導航系統的可觀測性,并仿真驗證了系統的導航性能。
2 脈沖星導航基本原理及應用優勢
2.1 脈沖星導航基本原理
基于X 射線脈沖星導航的航天器自主導航是通過位置差分觀測實現,即比較航天器與處于太陽系質心(Solar System Barycentre,SSB)處的脈沖星信號相位差來提取導航測量值。 測量值反映的是航天器到SSB 在脈沖星方向上的投影距離。通過處理基于一個或多個不同方向脈沖星的測量結果,并結合航天器軌道動力學進行濾波,即可計算得到航天器位置及速度的最佳估計[13]。 具體原理示意圖如圖1 所示。
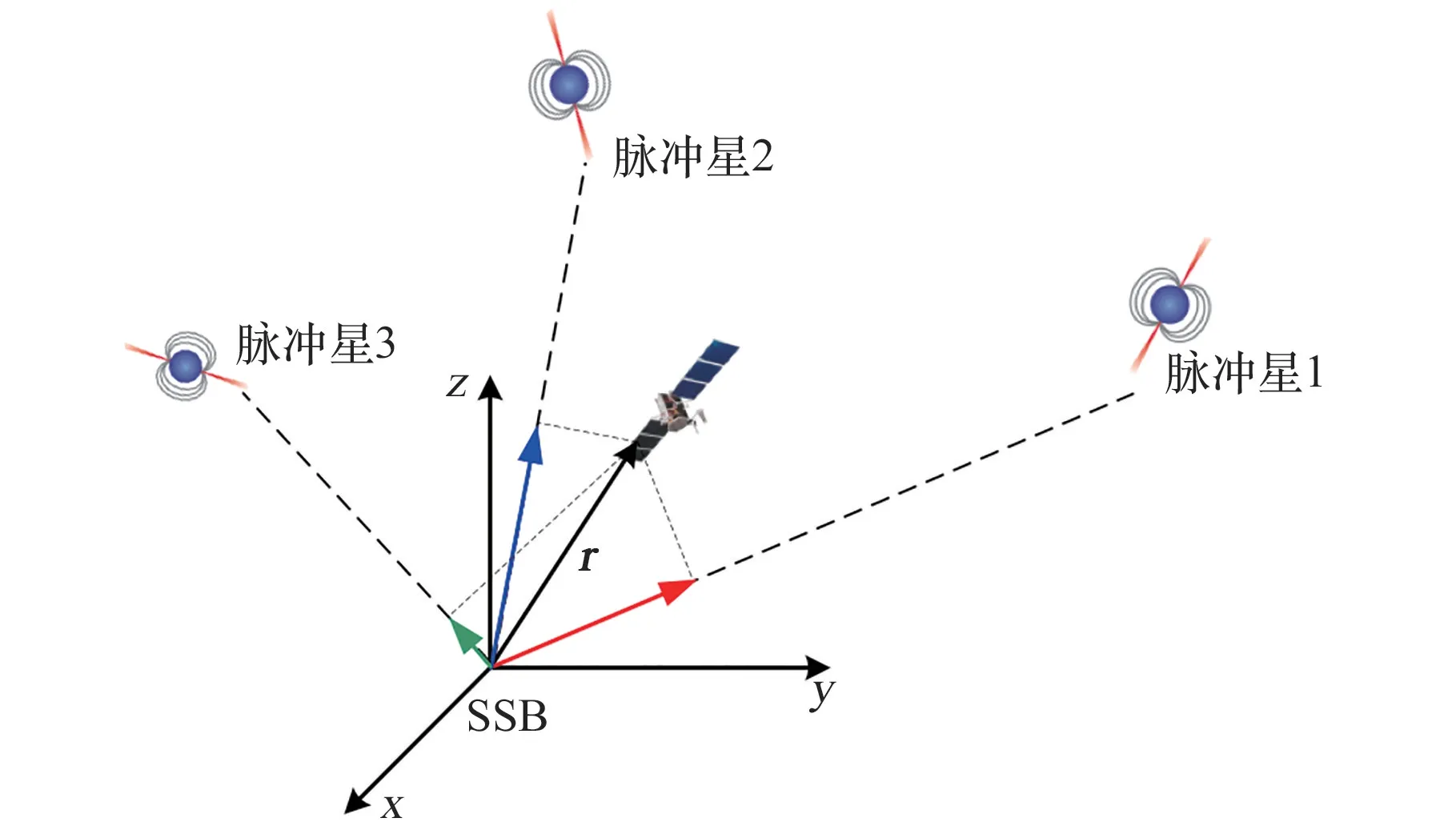
圖1 X 射線脈沖星導航原理Fig.1 Principle of X-ray pulsar-based navigation
導航測量值如式(1)所示:

其中,n為脈沖星方向矢量,r為航天器位置矢量,c為光速。tSC為航天器處探測得到的脈沖到達時間,光子的相位信息可利用星載計算機直接計算;tSSB為脈沖到達SSB 處的時間,相應的相位信息需要根據如式(2)建立在SSB 處的相位傳播模型進行預報。

其中,?0是星歷表歷元t0時刻的脈沖星信號相位。υ(n)0=υ(n)(t0) 是t0時刻的自轉頻率的各階導數。
相位傳播模型中的相關參數以及觀測目標脈沖星的輪廓模板由構建的脈沖星數據庫提供。 而在實際脈沖星計時導航中,頻率參數高階導數無法非常精確地估計,會產生計時噪聲,計時噪聲引起的相位傳播誤差會隨時間增長而累積。 因此,脈沖星數據庫需要根據脈沖星相關情況進行更新,航天器才可以在參數誤差的允許范圍內開展自主導航。
2.2 脈沖星導航應用優勢
X 射線脈沖星的周期具有良好的長期穩定性,可以實現從近地到深空的全領域、全天候、全天時的自主導航服務,不僅可以提供高可靠性的位置、速度和姿態等導航信息,還可以提供時間基準信息。 同時,X 脈沖光子屬于高能粒子,能夠集中脈沖星的絕大部分輻射能量,有利于星載導航終端的小型化與輕型化。
與其他自主導航方法相比,X 射線脈沖星導航具有以下優勢:①在全太陽系內導航精度一致,其導航結果不存在因原理觀測天體而急劇惡化的情況,且影響導航精度的誤差因素較少;②X 射線脈沖星導航原理簡單,僅攜帶單一X 射線導航終端即可實現航天器在軌的自主導航;③導航系統消耗代價極低,可以實現完全的在軌實時計算處理;④可以無視日凌等干擾現象的影響;⑤X 射線脈沖星在天區分布廣泛,可以保證其導航測量值在任意時刻均能觀測獲取。
綜上所述,基于X 射線脈沖星觀測的自主導航方法在載人火星探測上具有導航效果較好,實現簡單且代價極低等諸多應用優勢,可以為任務過程中航天員的生命安全提供有效保障,作為載人火星探測的保底自主導航手段。
3 脈沖星導航載人探火系統初步方案
3.1 初步方案設計
導航系統包括探測分系統及在軌處理分系統。 探測分系統由X 射線掠入射嵌套聚焦鏡頭組件和X 射線導航終端組件兩部分組成;在軌處理分系統由整器嵌入式計算機實現,作為星載的導航計算平臺。
3.1.1 探測分系統方案設計
設計采用如圖2 所示的X 射線掠入射聚焦探測體制,以美國在國際空間站上的NICER 探測器及作為脈沖星導航試驗01 星的主載荷為基礎,利用硅漂移導航終端組件實現X 射線光子高效率探測,加入空間本底抑制系統,降低空間復雜高能環境的噪聲;以在研EP 衛星的Wolter-I 型聚焦鏡作為基礎,通過一次反射技術,嵌套掠入射聚焦光學系統,實現X 射線光子高效率聚焦。
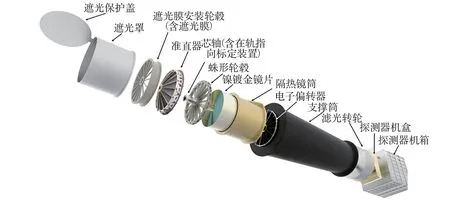
圖2 X 射線導航終端示意圖Fig.2 Schematic diagram of X-ray detector
X 射線掠入射鏡片采用鎳鈷材料,結構剛度更強。 鏡片厚度較純鎳鏡片降低50%,實現鏡片輕量化。 通過優化設計,將X 射線掠入射嵌套聚焦鏡頭組件和X 射線導航終端組件分別安裝于整器結構上,能有效降低系統重量。
具體技術參數設計如表1 所示。

表1 參數指標設計Table 1 Design of technical parameters
3.1.2 在軌處理分系統方案設計
在軌處理分系統設計能實現X 射線光子數據預處理、動態信號處理和導航解算功能,完成導航算法的在軌實現,實時解算出衛星軌道信息。同時,分系統還需具備導航參數、脈沖星星歷及模板參數以及整個程序的非日凌時間段的在軌更新能力,從而在載人火星探測任務過程中,能針對實際狀況對脈沖星信號處理與導航算法進行持續優化與更新,以保證任務周期內的導航性能。
具體功能設計如下:
1)在軌數據預處理。 自主獲取當前觀測目標信息,對星上探測器得到的實時觀測數據進行篩選、過濾、時間解算及格式轉換,接收并處理得到脈沖星星歷等輔助信息供導航解算使用等;
2)動態信號處理。 基于一定時段內的單光子觀測信息得到脈沖到達時間(Time of Arrival,TOA)的估計;
3)導航解算。 基于信號處理結果和其他信息,計算得到航天器當前位置和速度估計。
在軌處理分系統核心計算模塊設計由高性能CPU,FPGA 及大容量FLASH 等組成。 對于邏輯運算比較簡單、適合并行的計算部分,包括在軌數據預處理和動態信號處理等,設計使用FPGA 進行數據處理;對于導航解算部分,設計利用專門的CPU 進行處理。
具體性能指標設計如表2 所示。

表2 性能指標設計Table 2 Design of performance indicators
3.2 脈沖星導航系統觀測模型
基于單探測器的脈沖星導航系統觀測模型可表示為式(3)、(4):
其中,x表示航天器狀態量,h(x) 為測量方程,v表示測量噪聲。 式中,觀測量z表示為脈沖到達SSB 與航天器之間的時間差。
由于脈沖星是太陽系外天體,光子從脈沖星到達導航終端的時間及到達SSB 的時間計算均需要考慮廣義相對論效應,考慮到X 射線導航終端與SSB 之間的幾何距離會產生時間Doppler 延遲、X 射線光子平行到達太陽系引起的Roemer 延遲和在太陽引力場作用下光線彎曲產生的Shapiro 延遲, 即可得到如式(5)所示的脈沖星導航測量值表達式。

式中,b是SSB 相對于太陽質心的位置,D0是脈沖星相對于太陽質心的位置矢量大小,μSun是太陽引力常數。
研究表明,如式(3)建立的單探測器脈沖星導航系統模型可觀測[21]。 但僅采用單一脈沖星的觀測數據進行導航,會極大降低系統的可觀測度及對應的導航精度。 因此,觀測方案采用序貫觀測不同方向上的3 顆脈沖星,以保證基于單探測器脈沖星觀測系統的導航精度。
3.3 導航系統可觀測性分析
3.3.1 導航脈沖星選擇
導航脈沖星選擇需要根據脈沖星的可見性條件,測量噪聲以及導航脈沖星組合的空間幾何分布、構型對導航精度的影響,并綜合考慮脈沖星的流量、周期及輪廓等數據庫參數進行分析。
基于國內外的脈沖星在軌觀測數據,本文選擇可用于導航觀測的脈沖星組合,如表3 所示。

表3 導航脈沖星Table 3 List of navigation pulsars
在載人火星探測任務執行過程中,由于太陽規避導致部分主選脈沖星不可見,這種情況下則可利用備選脈沖星如B1509 等進行替換序貫觀測。
3.3.2 基于NICER 數據的脈沖星可觀測性分析
NICER 是NASA SEXTENT 項目的一部分,于2017 年6 月發射至國際空間站,是驗證X 射線脈沖星導航的主探測器,具有極高的時間分辨率和靈敏度,能提供充足的累積觀測數據,是目前X射線脈沖星計時導航研究的最佳選擇。 同時,NICER 的X 射線導航終端各單元的有效面積約為35 cm2,與本文設計的掠入射聚焦型導航終端探測體制相同,單元有效面積近似(40 cm2)。 因此,本文選擇利用NICER 的在軌觀測數據進行可觀測性分析。
主選導航脈沖星的TOA 精度與觀測時間的關系如圖3 所示,分析所用數據來自NICER 探測器。
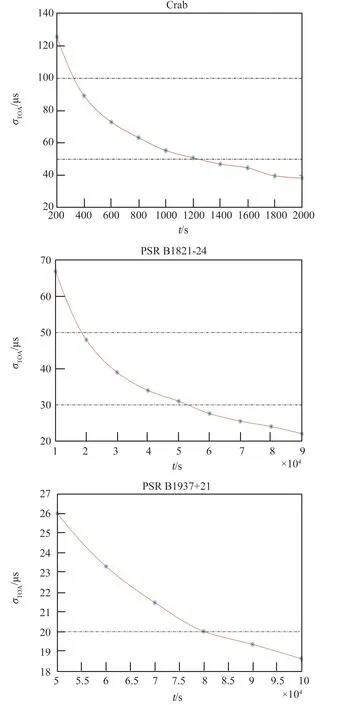
圖3 導航脈沖星TOA 殘差與觀測時間的關系Fig. 3 Relationship between the TOA accuracy of navigation pulsars and the observation time
其中,大流量年輕脈沖星Crab 在觀測時長約為1200 s 時,處理TOA 精度可以達到50 μs;毫秒脈沖星B1821 在觀測時長約18 000 s 時,其處理TOA 精度可達到50 μs,在觀測時長約52 000 s時,其處理TOA 精度可達到30 μs;毫秒脈沖星B1937 在觀測時長約80 000 s 時,其處理TOA 精度可達到20 μs。
綜上所述,在載人火星探測任務執行過程中,航天器可以根據觀測的脈沖星處理TOA 精度與時間的關系,分配不同的觀測時長。 且設計方案中導航終端的單元有效面積大于NICER,因此,TOA 精度會優于上述分析結果。
4 仿真驗證
4.1 仿真條件
本文選取2020 年美國毅力號火星探測器的地火轉移段軌道作為仿真軌道,選取時間為2020年10 月2 日~2020 年11 月30 日,為期60 d 的轉移軌道數據模擬載人火星探測器應用場景,坐標系采用J2000.0 日心慣性坐標系。 仿真使用Crab、B1821-24 及B1937+21 作為X 射線導航脈沖星,采用對3 顆導航星序貫觀測的觀測模式;X射線導航終端的單元有效面積設置為40 cm2,考慮到導航脈沖星的恢復輪廓信噪比及信號處理所需時間等方面的因素,完成一次續慣觀測的導航步長設置為24 h,其中導航星Crab、B1821-24 及B1937+21 的持續觀測時間及根據3.3.2 節分析結果設置,導航脈沖星的脈沖TOA 隨機測量方差如表4 所示。
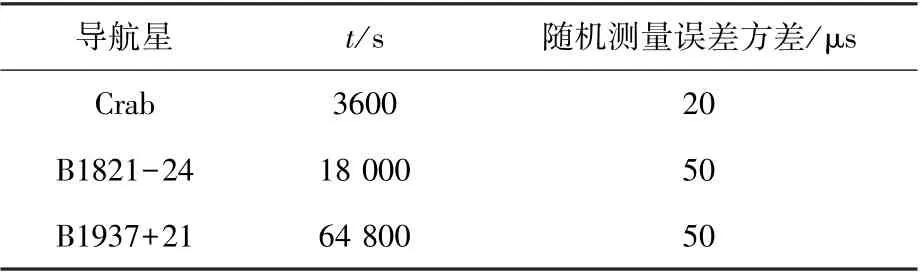
表4 觀測時間及測量誤差方差Table 4 The observation time of navigation pulsars and variance list of measurement error
本文使用UKF( Unscented Kalman Filter) 濾波方法,濾波器初始狀態誤差為dX=[104,104,104,10,10,10],初始狀態誤差協方差矩陣P0=diag(108,108,108,102,102,102) 。
4.2 仿真結果
圖4 分別給出了基于序貫觀測X 射線脈沖星的導航系統在地火轉移段軌道下的自主導航位置和速度誤差。

圖4 仿真導航結果Fig.4 Navigation performance of simulation
仿真結果表明,模擬載人火星探測器僅憑借脈沖星導航系統可以實現自主導航的精度為:位置估計誤差20 km 左右,速度估計誤差約為0.05 m/s 左右,最優定軌精度可以達到10 km 左右。 且除去在軌的信號處理過程外,算法一次濾波周期的導航解算僅耗時2 s 左右。
由此可見,僅需要改變X 射線導航終端的朝向,序貫觀測觀測3 顆脈沖星,即可實現無需依賴地面測控系統的航天器自主導航,工程實現簡單,代價極低,且導航精度可以接受。 因此,在工程應用價值較高,可以為載人火星探測提供一種能有效保底的自主導航方案。
5 結論
本文基于載人探測器對自主導航的迫切需求,針對地火轉移過程中面臨日凌干擾造成的與地面通訊中斷等問題,闡述了脈沖星導航的應用優勢;設計給出了涵蓋X 射線脈沖星導航終端、脈沖星星載計算平臺的載人探火系統的初步方案以及導航脈沖星的觀測方案;對可用于導航的脈沖星進行了優選,并基于現有的空間觀測數據分析了導航系統的可觀測性。
1)通過算例仿真分析,結果表明基于單探測器序貫觀測X 射線脈沖星的導航系統能為載人火星探測器提供精度20 km 左右的自主導航方法,且系統原理簡單,工程實現代價極低,能夠在軌快速完成導航解算。
2)X 射線脈沖星導航能為中國未來的載人火星探測任務轉移軌道自主導航系統的設計提供一種簡單、低耗、可行的導航方案,可作為保障航天員生命安全的保底自主導航手段,也可為中國未來開展木星以遠的行星探測及太陽系邊際探測等提供參考及技術支持。
