小型足球機器人綜合實訓平臺設計*
2022-11-10 06:39:54金亦挺張宇健
計算機時代 2022年11期
金亦挺,張宇健
(浙江工業大學計算機科學與技術學院,浙江 杭州 310000)
0 引言
電子信息類課程本身難度較大,加上硬件設備和操作場景的限制,影響到了學生動手能力的培養,給實踐教學提出了較大的挑戰[1]。大學生除了要學會解決復雜工程問題,還要具備團隊溝通和協作創新的能力,所以如何設計既有較強的應用背景又能增強學生動手能力的綜合實訓平臺,已經是一個重要的課題[2-3]。
目前機器人在各個領域的應用中需求越來越大,國家對于機器人的研發和投入也逐漸加大[4]。要加快機器人的研發,實現技術創新和突破,最好從高校抓起。目前,機器人已經是高校大部分智能綜合實訓平臺的核心部件[5-6]。其中足球機器人更是一個非常好的載體[7-8],因為它集合了圖像處理、自動決策[9]、路徑規劃[10]以及自主避障等功能于一身,并涉及到計算機、電子電路、自動化等多門學科知識。現在基于足球機器人的比賽日益增多,比如近年來火熱發展的RoboCup足球機器人比賽等[11,12]。
綜合上述分析,本文進行了小型足球機器人綜合實訓平臺設計,該平臺結合了計算機、機電、機械等專業知識,并將圖像處理、信號傳輸、機電控制等知識點融入其中。
1 足球機器人實訓平臺整體設計
小型足球機器人綜合實訓平臺主要由如下五部分組成:機器人本體系統,視覺識別系統,決策調度系統,無線通信系統以及場地運行系統,平臺的整體框架如圖1所示。

圖1 平臺整體框架圖
⑴機器人本體系統就是足球機器人本身,是整體系統的執行機構。本文選擇的足球機器人安裝了四個全向輪,同時配有控球、擊球機構,通過控球桿與球面的摩擦力,帶動小球反向轉動而不脫離機器人,擊球則是利用電磁線圈產生的電磁場吸引擊球機構向前移動從而將球擊出。
⑵視覺識別系統相當于是足球機器人的眼睛,這也是它獲取數據的主要來源,我們在場地上方布置兩個攝像頭來采集信息,然后將數據傳輸到視覺服務器上的采集卡中,由視覺處理軟件對兩個攝像頭獲取到的數據進行計算、分析、識別,最后將處理后的數據傳輸到決策調度系統。
⑶決策調度系統相當于是足球機器人的大腦,在接收視覺識別系統傳來的信息后,從中獲取到場上足球機器人的信息,球的位置、運動方向以及整體場地情況,決策調度系統隨即做出對應的決策指令。
⑷無線通信系統相當于是足球機器人的神經網絡,通過交換機將視覺機、決策機、裁判盒組成局域網,決策機通過無線發射機與機器人進行雙向通訊。
⑸ 場地運行系統則提供了一個長寬為10.4m*7.4m 的場地,兩個球門,以及其他配套設施,滿足機器人運行的必要環境。
總的來說,足球機器人實訓平臺的整體框架是:先由場地運行系統為整體系統運行提供基礎環境,接著視覺識別系統采集機器人和球的位置及運動狀態信息,經分析和處理后傳送給決策調度系統,決策調度系統對接收到的信息進行推理決策后,將決策指令通過無線通信系統傳輸給機器人本體系統,機器人收到指令后,執行相應的策略。其中決策調度系統是連接視覺識別系統和機器人本體系統的關鍵,機器人的所有戰術策略都是由決策調度系統發起,對于這么一個復雜的系統,如何讓各個子系統各司其職,并且協調統一的去完成任務,就是讓學生去學習和挑戰的地方。
2 足球機器人實訓平臺具體設計
2.1 機器人本體系統
機器人本體系統是足球機器人實訓平臺的主體機構,因為機器人在足球比賽中需要快速反應,并且要具備極高的移動靈活性,所以實訓平臺選擇了RoboCup小型足球機器人[13],如圖2所示。
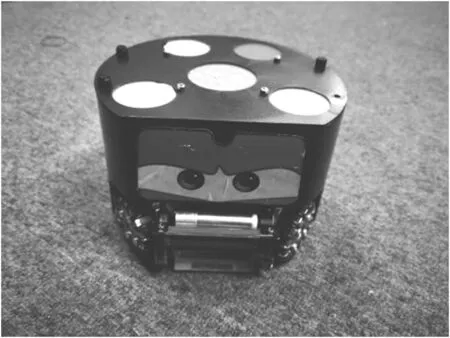
圖2 RoboCup足球機器人
RoboCup 小型足球機器人有四個全向輪,保證了機器人移動的穩定性,也保證了機器人在平面上的全向移動、原地旋轉,它主要分為三個部分:機械結構、電氣結構和程序結構。機械結構部分涉及運動機構的相互配合,來完成機器人基本功能與框架,電氣結構部分通過電路實現對各個機械結構的信息采集及傳輸,程序結構部分是在機械與電氣的基礎上完成底層控制算法,機器人本體系統具體結構如圖3所示。
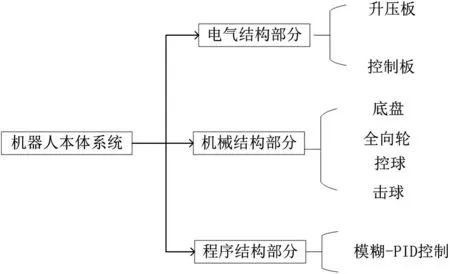
圖3 機器人本體系統結構圖
2.2 視覺識別系統
機器人視覺識別系統是整個系統獲取外界信息的主要部件,它由攝像頭,圖像采集卡和軟件三部分構成。視覺識別系統的主要任務是:利用視覺識別算法獲取到機器人和小球的位置及其運動信息,然后將信息處理后的結果提交給決策調度系統。足球機器人頂部中間位置貼有藍色或黃色色標,用來區分不同隊伍車輛,在同一隊伍內,采用不同的粉色和綠色組合,來代表同一隊的不同車號,視覺識別系統的任務之一就是通過識別機器人頂部的色標來判斷機器人所屬隊伍及其車號,如圖4所示。

圖4 色標與車號對應圖
在視覺識別系統中,我們可以引入圖像處理、物體識別等知識,設計與之相關的實驗,引導學生思考計算機是如何對圖像進行分析和識別的。
2.3 決策調度系統
決策調度系統的主要工作是在接收到視覺識別系統傳來的場地信息后,通過判斷場上形勢,決策出最佳策略來指導機器人進行后續動作。即在得到己方機器人、對方機器人、球的位置和運動信息后,采用匹配最近鄰算法[14]進行相應的路徑規劃,并做出最佳決策調度策略,然后將制定好的策略任務通過無線通訊系統發送給各個機器人。
綜合實訓平臺的決策調度框架采用基于有限狀態機的多機器人協作分層決策框架[15],即B-PAS(Baysbased Play Agent and Skill),由Play 層、Agent 層和Skill 層組成,分別負責單個機器人的運動控制、角色匹配和任務分配以及單個機器人任務規劃,決策調度框架如圖5所示。

圖5 決策調度框架圖
綜合實訓平臺還提供了一個Linux 系統的足球仿真系統,學生可以通過此平臺編寫相應的策略代碼,戰術腳本,通過仿真系統可以迅速進行相應的調試,仿真系統執行代碼策略并通過無線發射器對足球機器人進行控制,可以實時的進行調試,使得代碼的編寫和改進更加便捷快速。另外本文在綜合實訓平臺日常實驗和參與各種賽事經驗的基礎上,總結出幾種進攻防守策略,如角球進攻策略,中場預測防守策略以及后場盯人防守策略,具體如下。
⑴角球進攻策略
由于角球進攻情況多樣,為了應付各種情況,我們將角球進攻策略一分為三。策略一:當底角埋伏機器人前方沒有機器人防守時,發球機器人會選擇一個挑球動作,當球滾到埋伏機器人前方時,會采取直接射門方式,由于守門機器人會優先朝向發球機器人,因此埋伏進攻的機器人有很大概率進球。策略二:當1 號機器人前有機器人防守,無法采取直接射門方式,我們安排另一個2 號機器人埋伏在中線,當發球機器人發出球后,1 號機器人會撤退,帶出敵方防守機器人,2 號機器人將加速向前,跑向原1 號機器人位置上射門。策略三:若以上兩個策略都被限制時,發球機器人會選擇傳球給中路,中路機器人接應并伺機選擇機會進攻。在大量實驗測試中,執行這種多策略角球進攻方法,角球進球率能大大提高。
⑵中場預測防守策略
對于中場防守,我們采取的更多是保守策略,由于中場的敵方機器人威脅性不大,因此我們采取的方式主要是在后場防守,防止敵方的猛攻。然而,當有一個敵方機器人越過離中線50cm處時,我方會有一個機器人上前盯防,其余機器人堵在球與球門的連線上,防止敵方機器人射門,經實際驗證,此策略能有效降低敵方中場直接射門成功率,如圖6所示。
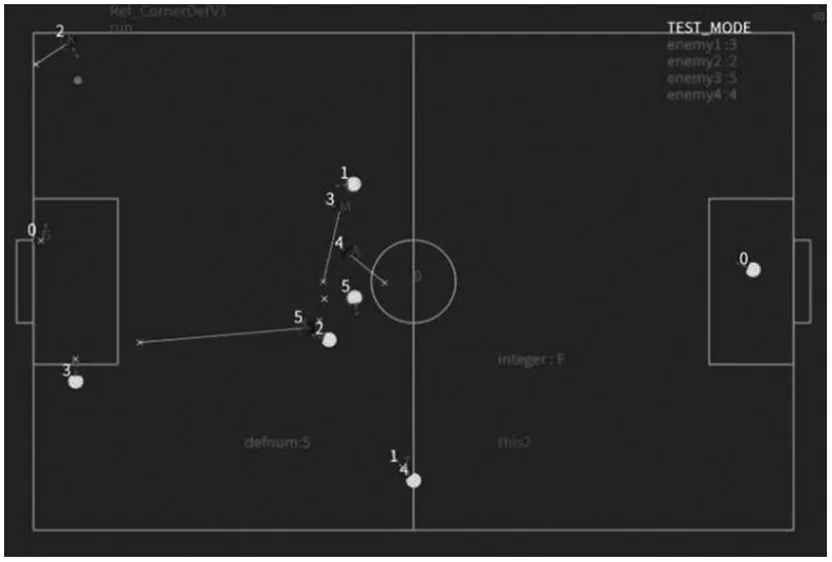
圖6 中場預測防守圖
⑶后場盯人防守策略
當敵方機器人進入后場,這對于我方的威脅是最大的,因此我們采用直接盯人的方式進行處理,只要有一個機器人出現在后場,就必有一個機器人出現盯防,其余機器人圍堵在球與球門的連線上,防止射門。這種后場壓迫式防守,對于對方的進攻能起到很好的防守效果。
2.4 無線通訊系統
無線通信系統主要的工作就是將決策調度系統制定出來的策略準確無誤的傳送給每個足球機器人,所以它的執行效率也至關重要,保證它的穩定性,機器人才能正確的執行任務。本文設計的實訓平臺的無線通訊系統采用發射機作為通訊硬件來給足球機器人傳達指令,采用1對N 的廣播方式,即使用一臺發射機以一定頻率給場上的N臺足球機器人同時傳送其對應的策略,每個足球機器人本體上都裝有無線接收裝置來接收發射機傳送來的指令數據,然后實時的根據指令數據去做出即時的應對操作。這樣的通訊系統具有抗干擾能力強,功耗小,傳輸速度快等特點。同時,為了方便管理兩只球隊對抗時的場景,本實驗平臺提供了裁判盒機制,裁判盒通過局域網連接雙方球隊的主機,并根據規則執行相應的腳本策略,此外裁判盒還可以與視覺系統相連,自動判斷場上的犯規行為,裁判盒的加入,大大提升了比賽的流暢性,同時也增加了平臺的可玩性。
2.5 場地運行系統
場地運行系統是給足球機器人運行提供必要的環境。本文設計的實訓平臺場地大小為10.4m*7.4m,場地表面由綠色氈墊覆蓋,禁區置于球門前、與底線相接并位于底線中央的區域。球門分別放置在兩條底線的中央位置,它是由兩個0.16m 高的垂直側壁連接一個0.16m 高的垂直后壁組成,球門側壁間的距離為1m,球門深度為0.18m,球門墻壁的厚度為0.02m,球門的表面、邊緣及頂部均為白色,球門的內表面應該覆蓋泡沫等材料以吸收球的沖擊力和降低偏轉速度等,如圖7所示。

圖7 綜合實訓平臺場地圖
3 結束語
本文將小型足球機器人引入綜合實訓平臺中,并設計了圖像處理、物體識別、路徑規劃、策略分析等實驗。試用表明,該平臺能很好的促進學生的學習熱情,增強學生的動手能力,讓學生能將日常課堂學習到的專業知識綜合的結合起來,并且該綜合實訓平臺在學院內也已經成立了小型足球機器人團隊,參與國內各項賽事中也取得了眾多的獎項。
最后,實訓平臺在實際應用過程中,還有待進一步改進,例如,如何提升機器人對球的落地點的預判能力,如何結合機器人現有運動趨勢來更好的進行路徑規劃,以及如何設計更多與計算機應用場景相關的實驗,讓學生們能夠更好的發揮出他們的創新性等。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2020年12期)2020-05-22 09:25:38
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年8期)2017-06-05 09:36:15
信息記錄材料(2016年4期)2016-03-11 15:22:54