基于Workbench的觸頭峰值耐受性能優化
2022-11-11 11:55:58李唯草
船電技術 2022年11期
陳 瑞,李唯草
應用研究
基于Workbench的觸頭峰值耐受性能優化
陳 瑞1,李唯草2
(1. 中國艦船研究設計中心,武漢 430064;2. 武漢船用電力推進裝置研究所,武漢 430064)
接觸器是配電系統的一個重要部件。根據實際使用需求,需具備較強的峰值電流耐受能力。本文對某型接觸器進行了三維有限元分析,計算了在短路試驗電流條件下,接觸器觸頭的承載電流及受到的電動力,并根據所得電動力分析了限制接觸器峰值耐受能力的原因,根據仿真結果對該型接觸器進行了結構優化,并通過試驗驗證了仿真計算與優化方案的正確性。
接觸器 峰值耐受電流 電動力 形變
0 引言
接觸器是配電系統的一個重要元件,其能接通、承載和分斷正常電路條件下(包括過載運行條件)下的電流。
在部分配電系統中,接觸器在使用中需要短時耐受過載、短路電流要求時,就要考慮接觸器的短時耐受電流能力。接觸器在經過短時耐受電流后,不得產生觸頭熔焊、斷開和機械零部件及絕緣件的變形、移位、損傷等現象。
某型接觸器的觸頭系統三維簡化模型如圖1所示。其動觸頭桿采用兩邊對稱的斷點結構,并且動觸頭桿采用可在豎直平面轉動的刀臂結構。動靜觸頭間采用面接觸,動觸頭桿依靠外部結構機構驅動,以圍繞動轉軸中心旋轉實現接觸器的合分操作。
該型接觸器試驗樣機在進行峰值耐受電流試驗時,在40 kA的峰值試驗電流下出現了觸頭斥開現象,觸頭部分被破壞。本文將對其結構進行基于Workbench的仿真計算分析并尋求合適的優化方案。
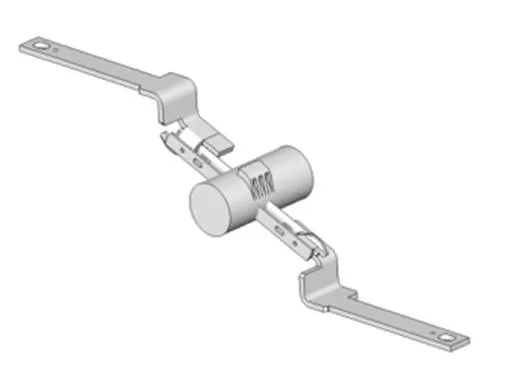
圖1 觸頭結構簡化模型
1 計算方法
當大電流流過觸頭時,在觸頭回路將產生強大的電動力,根據觸頭的不同結構,該電動力可能是吸力也可能是斥力;觸頭中的電流還會在周圍產生磁場,在磁場的作用下觸頭周圍的導磁體也會對觸頭產生作用力;同時由于動靜觸頭間的實際接觸面積很小,在接觸區域附近還會發生電流線收縮,使得流經動靜觸頭的電流反向而產生電動斥力,即HOLM力。當觸頭間總斥力大于觸頭間吸力與觸頭彈簧提供的預壓緊力,動靜觸頭便會斥開,出現噴弧現象,損害觸頭結構。
在計算觸頭間電動力時,可以根據觸頭結構進行相應的簡化。而對于本接觸器,觸頭桿的長度與電觸頭桿間距d之比大于10,在這種情況下模型可以簡化為兩相等平行無限長載流導體而保證計算誤差小于10%以保證工程應用需要,此時可根據比奧-沙伐定律采用公式(1)進行計算:

其中為流經觸頭的電流,為載流導體長度,為載流導體間的距離。
而對于HOLM力采用公式(2)進行計算

其中:r為導電斑點半徑;R為觸頭等效半徑;ξ為觸頭表面接觸系數情況,用來表征接觸情況,一般取0.3與0.6。
但對于實際接觸系統,其接觸形式一般較為復雜,且觸頭周圍磁場相互疊加影響,直接采用公式(1)計算電動力時的誤差過大。而采用公式(2)對HOLM力計算的準確性通過試驗驗證[2]。因此本文先采用三維有限元法對接觸器進行單獨的電動力分析;基于電動力的計算結果進一步探究限制開關峰值耐受能力的原因。
2 電動力的計算
為了簡化仿真過程,在仿真前對模型進行簡化處理,刪除了接觸系統中非導磁部件,僅保留了觸頭導電系統。簡化后的觸頭電動力計算模型如圖2所示。
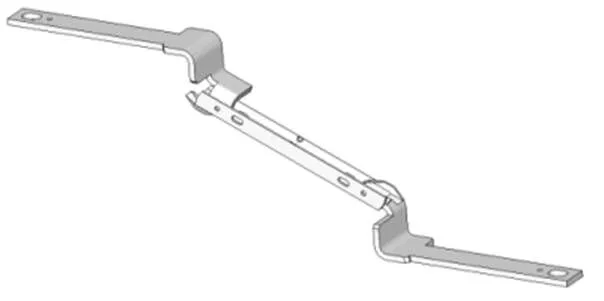
圖2 觸頭電動力仿真模型
根據實際試驗要求,在靜觸頭兩側端面加載40 kA直流電流,并根據實際樣機情況將模型中的材料設置為銅;并且手動劃分網格,保證模型中每處至少有兩層計算單元;同時除施加激勵斷面外,其他四面的計算區域選擇2.5倍于工作區域,及5倍于工作區域。
首先計算分析仿真模型磁感應強度和動觸頭桿電動力。圖3為模型磁感應強度分布圖。表1為兩根動觸頭桿在不同方向上所受電動力大小。
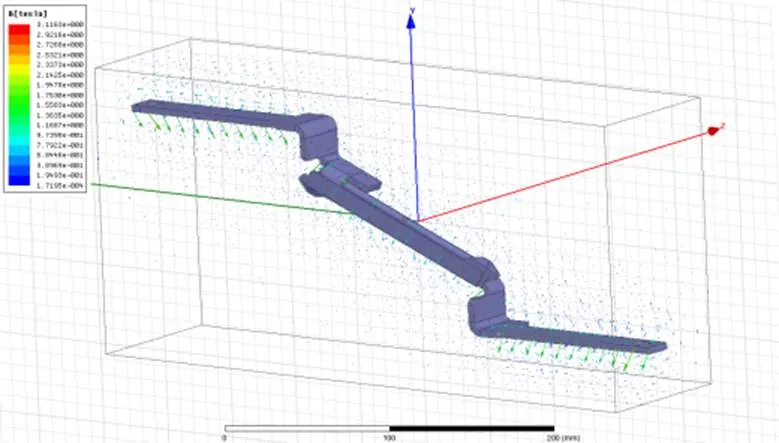
圖3 模型磁感應強度分布圖
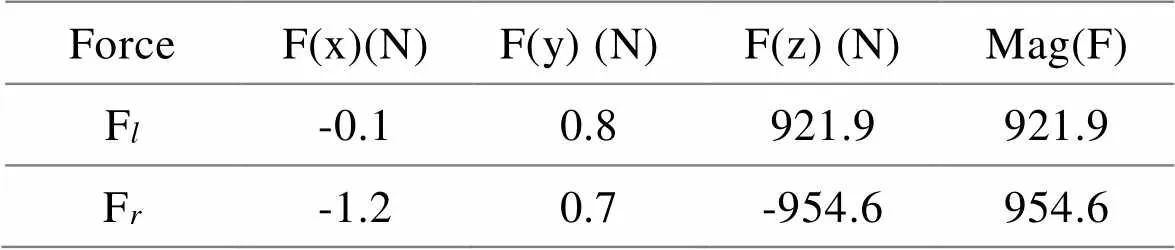
表1 動觸頭桿受電動力大小
從表1可見,兩根動觸頭桿所受電動力在不同方向上,數值大小基本一致,僅有Z方向上方向相反。因為在通流過程中,兩根動觸頭的電流方向相同,所以二者相互吸引。故在Z方向上受力大小基本一致,方向相反,表現為吸力。
3 HOLM力計算
在得到每根動觸頭桿所受電動力后可以根據公式(2)來計算觸指上的HOLM斥力大小,在計算觸頭等效接觸半徑的時候,Fk由(3)式確定:
其中1為觸頭預壓力,2為前文所計算的電動力,為HOLM力。并采用迭代法進行計算以尋求更準確的計算結果。
但是計算結果顯示,40 kA電流動穩試驗情況下,動靜觸頭見的霍姆力均明顯小于電動力。所以霍姆力不會導致觸頭間的斥開。故此時并不是HOLM力導致此型接觸器峰值耐受試驗失敗。
4 結果分析及優化方案
根據仿真和試驗結果,對觸頭斥開可能原因進行分析:由于根據接觸器動靜觸頭結構對稱,且兩側動觸頭的電動力大小基本相同;說明動靜觸頭正中間平面處的位移始終為0,所以模型可以簡化為簡支梁模型——兩端靜觸頭僅提供豎向約束,而不提供轉角約束。而電動吸力會使得動觸頭桿出現彎曲,而導致動靜觸頭之間接觸面狀況變差,進而使得觸頭便會斥開。
建模:由于觸頭模型的對稱性,同時可以簡化為簡支梁模型,故在形變計算分析過程中,僅對一半的模型進行建模分析;且約束條件之一就是靜觸頭正中間平面的位移為0。同時由于簡支梁模型形變只能是在垂直方向上,而不會在任何方向上發生旋轉,故在建模時,直接將靜觸頭簡化為兩個圓柱體,圓柱體內側邊緣位置與靜觸頭邊緣位置一致。且動觸頭桿的形變會造成動觸頭桿在靜觸頭上滑動,所以在建模時將動靜觸頭簡化Frictional接觸對。
綜上簡化后模型如圖4所示。
圖4 仿真簡化模型
施加力:為了便于建模,約束力與電動力的施加是通過在模型表面添加表面印記進行。而在實際通電過程中,動觸頭桿受到的電動力均為體積力,建模過程也簡化為平面力。建模過程中力的施加效果如圖5所示。

圖5 力的施加
根據圖5與40 kA電動力仿真結果得到的動觸頭桿形變仿真結果如圖6所示。
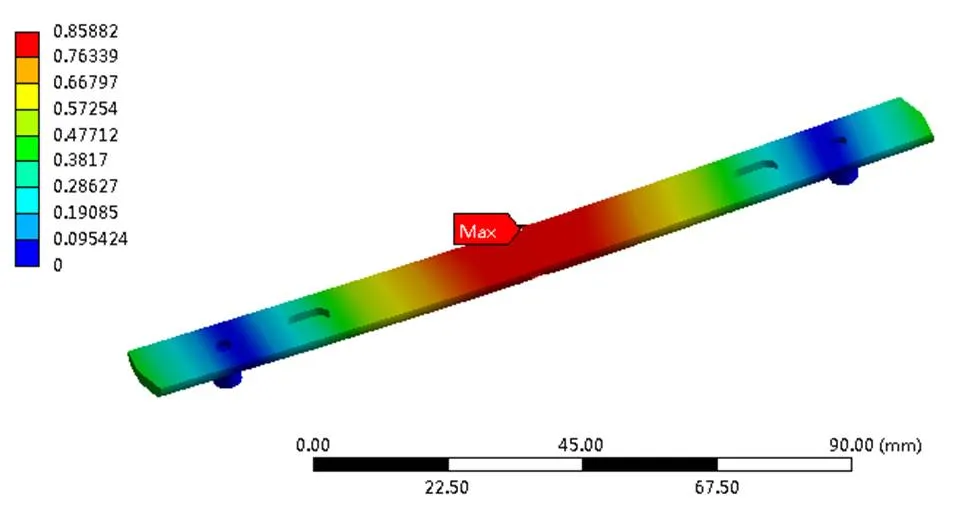
圖6 動觸頭桿形變結果
由圖6可知,動觸頭桿最大形變發生在中部,達到了0.86 mm;動靜觸頭接觸區域的形變量也到了0.38 mm。
根據如圖5接觸器的動觸頭桿形變特點,可從以下幾個方面來減小動觸頭桿的形變:1)在接觸區域增加約束力;2)在形變量最大的地方施加位移約束以減小形變量;3)以上兩點改進措施同時施加。
優化方案一:在接觸區域增加約束力。在設計仿真過程中,在兩端接觸區域施加60 N的約束力,即圖5中B與C區域施加60 N的力,方向由動觸頭桿指向靜觸頭。仿真結果如圖7所示。
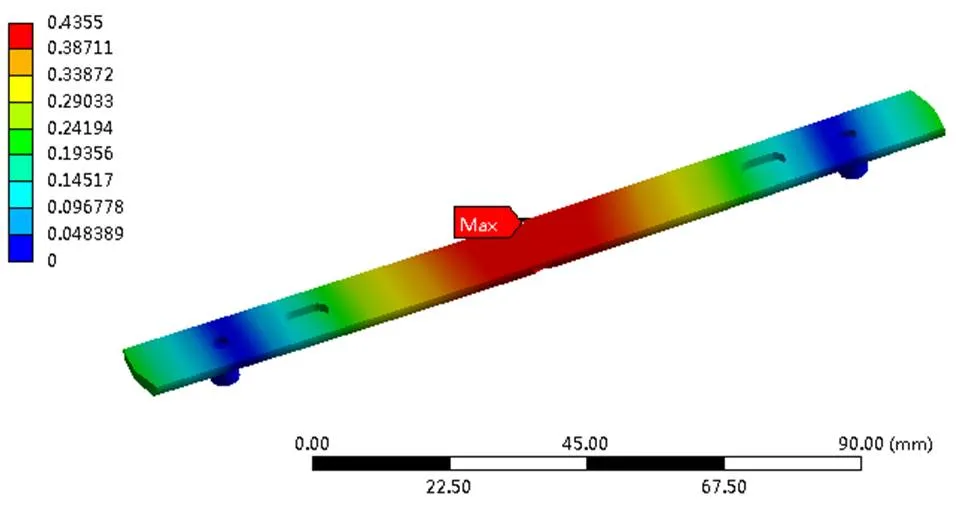
圖7 優化方案一仿真結果
由圖7可知,動觸頭桿最大形變發生在中部,達到了0.43 mm;動靜觸頭接觸區域的形變量也到了0.20 mm。相比于原設計方案,觸頭區域的形變量明顯減小。
優化方案二:形變量最大的地方即動觸頭桿中部,施加位移約束。實際設計仿真過程中,模型其它部分不變。其仿真結果如圖8所示。
由圖8可知,動觸頭桿最大形變發生在動觸頭桿端部,同時最大形變量僅有0.12 mm;動靜觸頭接觸區域的形變量僅有約0.05 mm。優化方案二后的觸頭區域的形變量相對于原方案已經明顯減小,效果十分顯著。
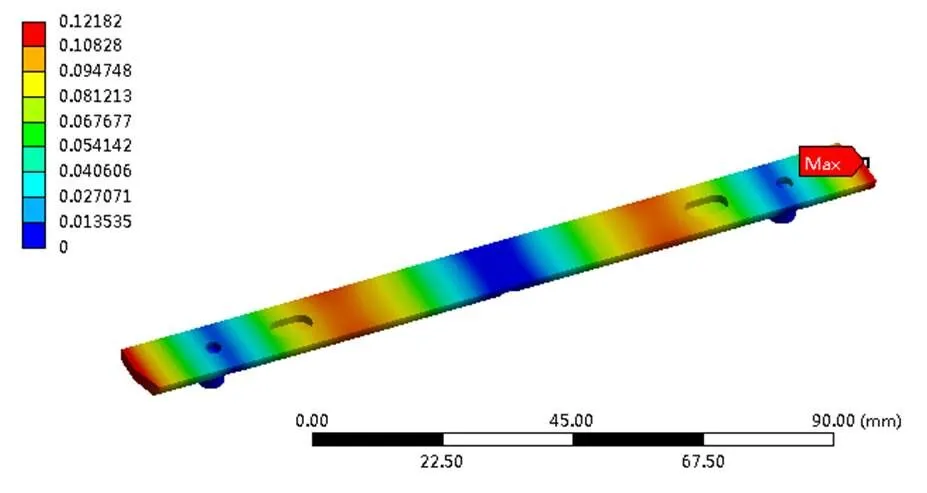
圖8 優化方案二仿真結果
優化方案三:以上兩點改進措施同時施加。實際設計仿真過程中,模型其它部分不變。其仿真結果如圖9所示。
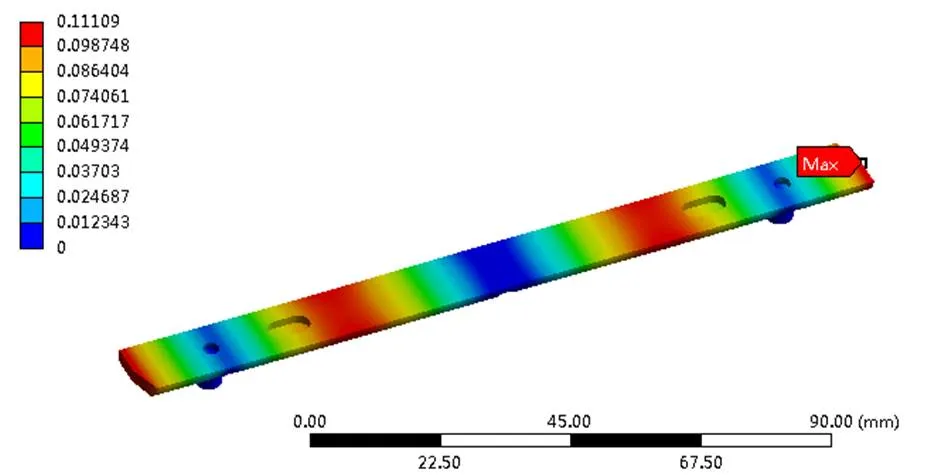
圖9 優化方案三仿真結果
由圖9可知,方案三的結果與方案二結果相似。動觸頭桿最大形變發生在動觸頭桿端部,同時最大形變量僅有0.11 mm;動靜觸頭接觸區域的形變量也僅有0.05 mm。優化效果相比方案二不明顯。
三個優化方案仿真結果對比如表2所示。
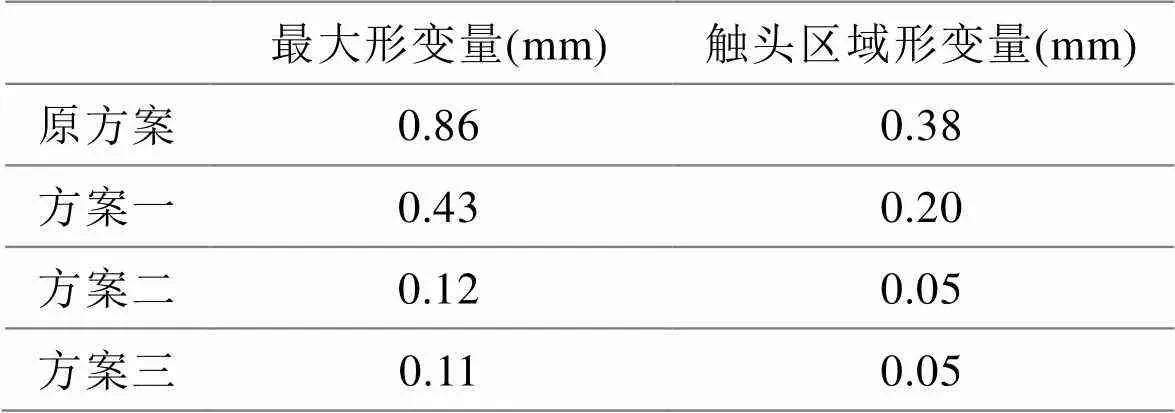
表2 優化方案結果對比
從優化后的結果來看,三個優化方案均可有效的減少觸頭接觸區域形變,因此本文將根據優化方案三對觸頭系統結構進行改進。
5 試驗結果
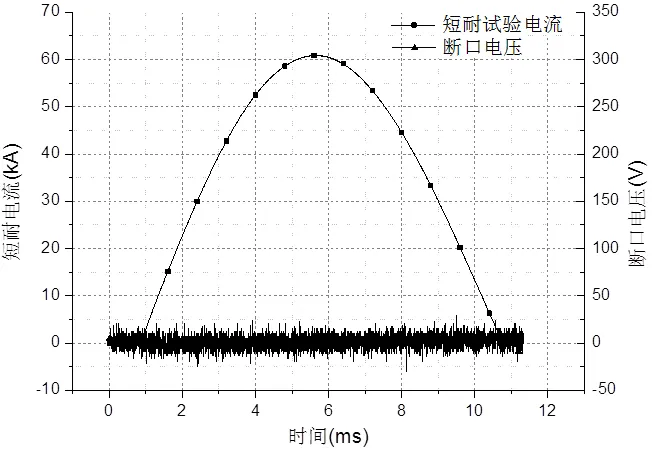
圖10 60 kA峰值耐受試驗電流波形
對采用了優化方案的新樣機再次進行60 kA電流下的峰值耐受電流試驗。60 kA峰值耐受試驗電流波形如圖10所示。

圖11 試驗成功后觸頭實物圖
試驗結果表明,改進后的接觸器觸頭系統在60 kA峰值耐受電流下,試驗電流與接觸器斷口電壓未出現突變;說明試驗過程中,動靜觸頭之間未發生斥開;同時觸頭系統未發生明顯觸頭熔焊、斷開及損壞現象。相比優化之前的試驗結果有了顯著的提升,基本達到了仿真預期,證實了仿真計算及優化方案的正確性。
6 結論
本文通過對某型接觸器觸頭結構仿真計算分析及試驗驗證,得到了以下結論:
1)通過基于Ansoft三維電磁耦合場的仿真計算,從理論上分析了該接觸器結構不具備40 kA電流短時耐受能力;
2)對觸頭在試驗電流下所受的電動力進行計算及HOLM力分析,并通過分析計算結果為優化設計提供了理論指導,確定了接觸器的優化方案;
3)對優化方案進行了仿真計算和試驗驗證,驗證了該方案的正確性。
[1] 蓉命哲, 吳翊. 開關電器計算學[M].北京:科學出版社,2018.
[2] 許志紅. 電器理論基礎[M]. 北京: 機械工業出版社, 2014.
[3] 黃蔚偈, 蘭太壽, 劉向軍. 基于ANSYS有限元法的接觸系統電動力分析[J]. 電氣開關, 2013(4): 18-21.
[4] 萬祥軍, 季慧玉, 陳正馨,等. 萬能式接觸器觸頭系統電動力仿真與試驗研究[J]. 低壓電器, 2012(16): 1-4.
[5] DL/T 593-2006, 高壓開關設備和控制設備標準的共用技術要求[S].
[6] 李興文, 陳德桂, 劉洪武, 等. 觸頭間電動斥力的三維有限元分析[J]. 高壓電器, 2004, 40(1): 53-55.
Peak withstand current optimization of contactors’ contacts based on workbench
Chen Rui1, Li Weicao2
(1. China Ship Development and Design Center, Wuhan 430064, China; 2.Wuhan Institute of Marine Electric Propulsion,Wuhan 430064, China)
TM591
A
1003-4862(2022)11-000-0
2022-04-11
陳瑞,(1981-),男,研究生,主要從事艦船電力系統方面研究。E-mail:whsm3998@whzyh.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
