基于模糊自適應(yīng)的小型空軌車輛控制算法研究*
2022-11-11 03:12:08古偉杰黃海鳳張新宇王伯銘
鐵道機(jī)車車輛 2022年5期
古偉杰,黃海鳳,張新宇,王伯銘
(1 西南交通大學(xué)機(jī)械工程學(xué)院,成都 610031;2 中國(guó)鐵道科學(xué)研究院集團(tuán)有限公司機(jī)車車輛研究所,北京 100081)
近年來(lái),懸掛式空軌車輛的優(yōu)勢(shì)逐漸顯現(xiàn),我國(guó)各個(gè)軌道交通車輛的生產(chǎn)制造、運(yùn)營(yíng)單位均十分關(guān)注懸掛式空軌車輛的研發(fā)、設(shè)計(jì)和制造等工作。結(jié)構(gòu)設(shè)計(jì)和動(dòng)力學(xué)分析方面,李忠繼等[3]采用多體系統(tǒng)動(dòng)力學(xué)軟件分析了空氣彈簧水平剛度和軌距變化對(duì)空軌列車轉(zhuǎn)向架曲線通過(guò)性能的影響。徐磊[5]對(duì)小型空軌車輛的轉(zhuǎn)向架的結(jié)構(gòu)進(jìn)行設(shè)計(jì),采用Hypermesh和ANSYS有限元分析軟件進(jìn)行了轉(zhuǎn)向架構(gòu)架的強(qiáng)度、模態(tài)和疲勞壽命分析,仿真驗(yàn)證了小型空軌車輛的轉(zhuǎn)向架構(gòu)架的設(shè)計(jì)合理性。劉雷雨等[6]采用SIMPACK動(dòng)力學(xué)仿真軟件,應(yīng)用控制變量法分別研究了曲線通過(guò)速度、導(dǎo)向輪輪軌間距和導(dǎo)向輪徑向剛度對(duì)空軌車輛曲線通過(guò)性能的影響。戴鑫亮等[7]采用ABAQUS軟件對(duì)空軌車輛轉(zhuǎn)向架搖枕進(jìn)行了靜強(qiáng)度分析和疲勞強(qiáng) 度分 析。JIANG Y Z等[8]建 立 了20自 由 度 的 小型空軌車輛動(dòng)力學(xué)模型,研究了車輛運(yùn)行過(guò)程中多工況下的動(dòng)力學(xué)性能。
空軌車輛的控制策略方面,張仁川[9]采用Matlab/Simulink軟件對(duì)小型空軌車輛的牽引控制策略進(jìn)行了仿真分析,采用AMEsim軟件對(duì)小型空軌車輛的制動(dòng)控制策略進(jìn)行了仿真分析。Anson等[10]對(duì)比分析了空軌車輛的感應(yīng)電動(dòng)機(jī)和直流電動(dòng)機(jī)牽引系統(tǒng)的優(yōu)缺點(diǎn)。
文中針對(duì)小型空軌車輛的運(yùn)行和控制特性,基于模糊自適應(yīng)方法建立小型空軌車輛的控制算法,實(shí)現(xiàn)空軌車輛的起動(dòng)、調(diào)速、減速停車及故障保護(hù)等功能。文中提出的模糊自適應(yīng)輪轂電機(jī)控制算法與經(jīng)典PI控制算法相比,其超調(diào)量、穩(wěn)定時(shí)間等均優(yōu)于傳統(tǒng)PI控制算法,模糊自適應(yīng)的輪轂電機(jī)控制算法的動(dòng)態(tài)和靜態(tài)控制精度均達(dá)到了小型空軌車輛的控制精度要求。
1 小型空軌車輛控制系統(tǒng)硬件組成
牽引電機(jī)是小型空軌車輛的關(guān)鍵驅(qū)動(dòng)元件,文中選用了輪轂電機(jī)作為牽引電機(jī),根據(jù)小型空軌車輛的設(shè)計(jì)參數(shù)(車重為300 kg,最高運(yùn)行速度為70 km/h,載重最大為200 kg,最大坡道60‰)對(duì)牽引電機(jī)進(jìn)行參數(shù)計(jì)算。
1.1 輪轂電機(jī)參數(shù)
所選輪轂電機(jī)的額定轉(zhuǎn)速為1 000 r/min,額定扭矩為30 N·m。電機(jī)轉(zhuǎn)速應(yīng)能滿足小型空軌車輛設(shè)計(jì)最高轉(zhuǎn)速的要求,即電機(jī)的最高轉(zhuǎn)速滿足式(1):

式中:Vmax為設(shè)計(jì)最高車速70 km/h;d為輪轂電機(jī)的直徑,413 mm。
為此,輪轂電機(jī)的最高轉(zhuǎn)速為900 r/min。
當(dāng)車輛以最高速度運(yùn)行在平直道時(shí),電機(jī)需要為車輛提供的功率為式(2)[11]:
為了完成對(duì)機(jī)械手的底座、機(jī)身、主橫梁、主懸梁等構(gòu)件的相對(duì)運(yùn)動(dòng)關(guān)系描述和簡(jiǎn)化計(jì)算,這里不考慮機(jī)身的旋轉(zhuǎn),將底座與機(jī)身看作機(jī)架固定,其它構(gòu)件簡(jiǎn)化為基本桿件,結(jié)構(gòu)簡(jiǎn)圖如圖1所示。

式中:η為動(dòng)力傳動(dòng)系統(tǒng)效率,取0.96;m為滿載重量500 kg;g為重力加速度,取9.8 m/s2;f為橡膠輪胎滾動(dòng)阻力系數(shù),取0.016;CD為空氣阻力系數(shù),取0.6[5];A為 車 輛 迎 風(fēng) 面 的 截 面 積,取0.8×1.2=0.96 m2。將相關(guān)數(shù)據(jù)代入式中,得P1=4.29 kW。
小型空軌車輛以25 km/h的平均速度駛過(guò)60‰的坡道時(shí),輪轂電機(jī)的功率由式(3)進(jìn)行計(jì)算:

式中:i為坡道坡度,選60‰。則車輛運(yùn)行速度為25 km/h的平均速度駛過(guò)60‰的坡道時(shí),輪轂電機(jī)的總功率為2.82 kW。
為此,選用4臺(tái)額定功率為1.5 kW,額定轉(zhuǎn)速為1 000 r/min的輪轂電機(jī)可以滿足小型空軌車輛的牽引需求。
1.2 牽引傳動(dòng)及控制系統(tǒng)結(jié)構(gòu)
小型空軌車輛的牽引傳動(dòng)及控制系統(tǒng)的硬件結(jié)構(gòu)圖如圖1所示。驅(qū)動(dòng)走行輪的輪轂電機(jī)為DC 72 V供電電源,額定功率為1.5 kW。每臺(tái)輪轂電機(jī)均帶霍爾傳感器用于反饋電機(jī)轉(zhuǎn)子位置信號(hào);小型空軌車輛牽引傳動(dòng)及控制系統(tǒng)在正常運(yùn)行情況下采用第三軌供電的形式,故障狀態(tài)下,采用額定電壓為72 V的蓄電池作為備用電源。控制系統(tǒng)為電機(jī)控制器提供模擬電壓作為控制信號(hào),控制系統(tǒng)采用STM32F407單片機(jī)控制板,如圖1所示。

圖1 牽引傳動(dòng)及控制系統(tǒng)硬件組成
每臺(tái)電機(jī)控制器都具有CAN通訊接口,牽引控制單元可以通過(guò)CAN總線與電機(jī)控制器通訊,從而獲取與電機(jī)運(yùn)行相關(guān)的信號(hào)以及通過(guò)CAN總線控制電機(jī)控制器。基于CAN總線構(gòu)成的網(wǎng)絡(luò)如圖2所示。CAN總線波特率設(shè)置為速度較高的500 kbps。控制中心可以通過(guò)CAN總線向電機(jī)控制器發(fā)送命令,控制電機(jī)正反轉(zhuǎn)、起動(dòng)和停止、是否開(kāi)啟再生制動(dòng)等功能。STM32控制板也要接收來(lái)自控制中心的命令,從而控制空軌車輛運(yùn)行在牽引、惰行和制動(dòng)工況。控制中心還可通過(guò)CAN總線記錄系統(tǒng)故障情況,用作小型空軌車輛檢修維護(hù)的依據(jù)之一。
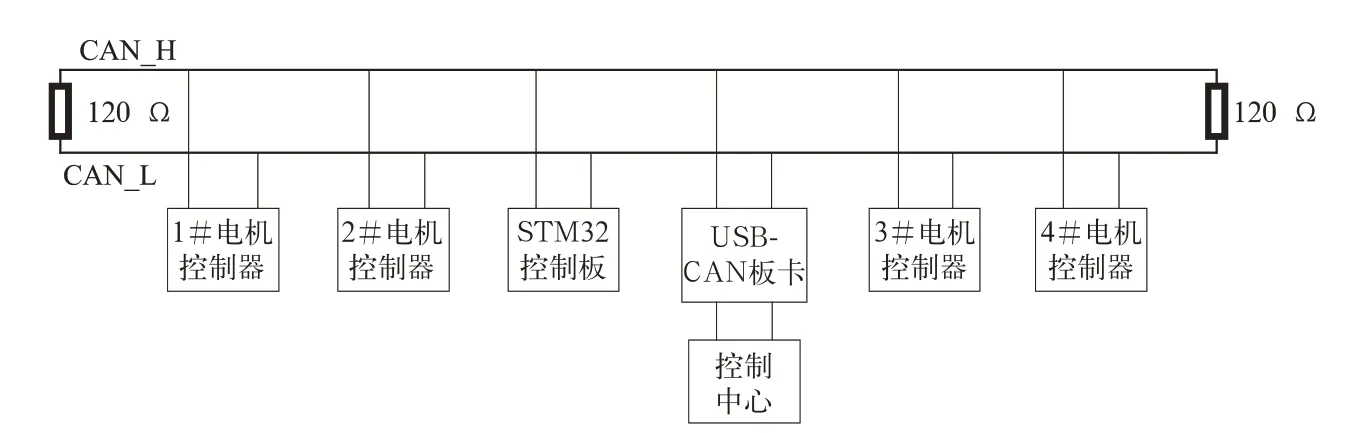
圖2 CAN總線網(wǎng)絡(luò)
2 小型空軌車輛牽引傳動(dòng)控制策略
電機(jī)控制器采用i*q=0的矢量控制策略,電機(jī)控制器外部輸入模擬電壓是速度控制器調(diào)節(jié)輸出的,速度控制器的輸出即為轉(zhuǎn)矩的目標(biāo)值i*q[12]。電機(jī)控制器接收來(lái)自速度控制器的模擬電壓通過(guò)轉(zhuǎn)換得到i*q,故實(shí)際是通過(guò)電機(jī)控制器外部的速度環(huán)得到期望轉(zhuǎn)矩控制電機(jī)輸出合適的轉(zhuǎn)矩從而控制電機(jī)的速度和轉(zhuǎn)矩。輪轂電機(jī)矢量控制框圖如圖3所示。

圖3 輪轂電機(jī)矢量控制框圖
速度控制器采用模糊自適應(yīng)PI控制器,模糊自適應(yīng)PI控制器的結(jié)構(gòu)如圖4所示,即采用雙輸入雙輸出的模糊控制器。其中,模糊控制器的結(jié)構(gòu)如圖5所示,速度誤差e(k)和速度誤差的變化率ec(k)作為輸入量,經(jīng)模糊化環(huán)節(jié)后將精確的輸入量轉(zhuǎn)化為模糊量,模糊推理器根據(jù)模糊規(guī)則庫(kù)的模糊控制規(guī)則計(jì)算得出模糊控制量,模糊控制量經(jīng)去模糊化環(huán)節(jié)后輸出精確的控制量Δkp和Δki。
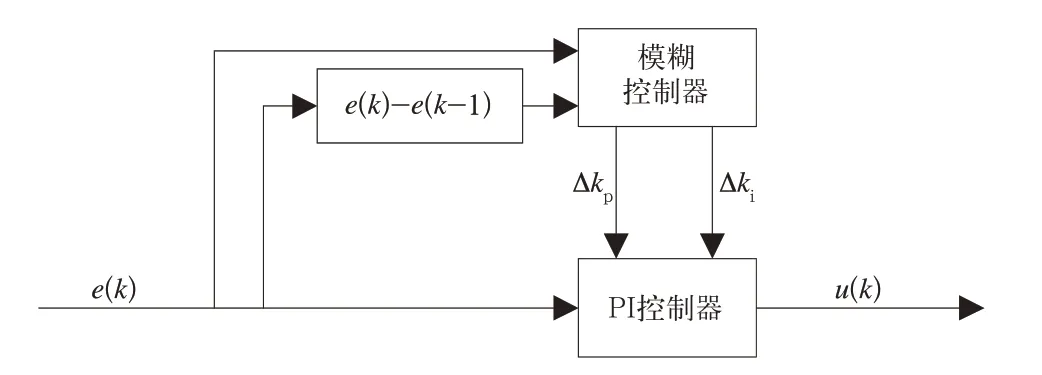
圖4 模糊自適應(yīng)PI控制器

圖5 模糊控制器
為滿足小型空軌車輛能夠快速起動(dòng),小型空軌車輛從0加速到30 km/h時(shí),采用i*q=const的控制方式使起動(dòng)轉(zhuǎn)矩基本恒定,即電機(jī)控制器的控制電壓被控制為恒定值。當(dāng)車輛速度超過(guò)30 km/h,通過(guò)切換開(kāi)關(guān)的作用,切換至模糊自適應(yīng)PI控制算法進(jìn)行調(diào)速。
模糊控制器的輸入變量為速度誤差e(k)和速度誤差變化ec(k),輸出變量為kp的增量Δkp和ki的增量Δki。輸入變量e和ec的論域均為[-6,6],輸出變量Δkp和Δki的論域均為[-3,3],輸入和輸出變量的模糊子集均為{NB,NM,NS,ZO,PS,PM,PB}。各個(gè)模糊子集的隸屬函數(shù)均采用三角形隸屬函數(shù)[13],如圖6所示。根據(jù)專家知識(shí)和實(shí)際操作經(jīng)驗(yàn),給出的模糊控制規(guī)則[14]見(jiàn)表1。

表1 Δkp和Δki的模糊控制規(guī)則表
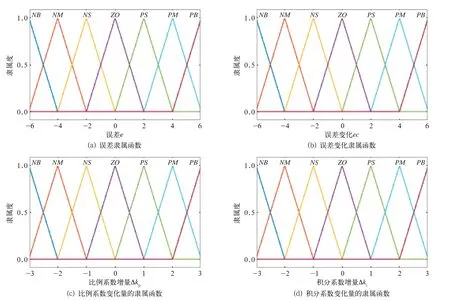
圖6 隸屬函數(shù)
模糊推理采用Mamdani型模糊推理算法進(jìn)行推理運(yùn)算,去模糊化采用最大隸屬度法,得到模糊控制器的輸入輸出變量關(guān)系曲面如圖7所示。

圖7 模糊控制器輸入輸出關(guān)系曲面
采用Matlab/Simulink軟件搭建了輪轂電機(jī)矢量控制系統(tǒng)模型,BLDCM控制系統(tǒng)仿真模型和模糊自適應(yīng)PI控制器仿真模型分別如圖8和圖9所示。交軸電流和直軸電流采用傳統(tǒng)PI算法調(diào)節(jié),當(dāng)電機(jī)轉(zhuǎn)速低于385 r/min(對(duì)應(yīng)小型空軌車輛的運(yùn)行速度為30 km/h)時(shí),采用i*q=const控制;當(dāng)輪轂電機(jī)速度高于385 r/min,速度環(huán)采用模糊自適應(yīng)PI算法進(jìn)行調(diào)節(jié)。

圖8 BLDCM控制系統(tǒng)仿真模型
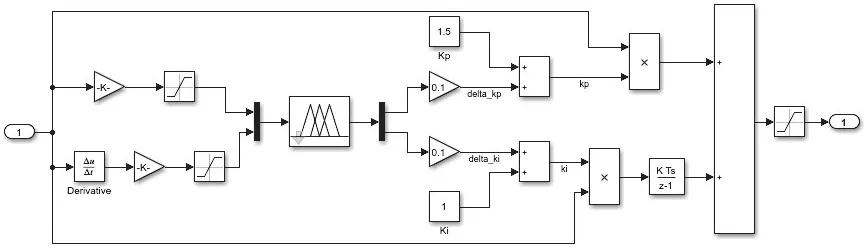
圖9 模糊自適應(yīng)PI控制器仿真模型
仿真參數(shù)設(shè)置:電機(jī)極對(duì)數(shù)為4,定子電阻為0.9 Ω。圖10的仿真條件:負(fù)載轉(zhuǎn)矩為恒定值2 N·m,初始設(shè)定速度為600 r/min,在t=0.15 s時(shí)改變?cè)O(shè)定速度至800 r/min,在t=0.25 s時(shí)改變?cè)O(shè)定速度至500 r/min。
電機(jī)的轉(zhuǎn)速跟蹤目標(biāo)值仿真曲線如圖10所示,從0加速到600 r/min以及從600 r/min加速至800 r/min的過(guò)程中,模糊自適應(yīng)PI算法的超調(diào)量均略小于傳統(tǒng)PI算法,但從800 r/min減速至500 r/min時(shí),模糊自適應(yīng)PI算法的超調(diào)量相比傳統(tǒng)PI算法減小了3%。傳統(tǒng)PI算法分別在t=0.029 s、t=0.164 s、t=0.267 s時(shí)刻達(dá)到穩(wěn)態(tài);模糊自適應(yīng)PI算法達(dá)到穩(wěn)態(tài)的時(shí)刻分別為t=0.027 s、t=0.162 s、t=0.262 s,均小于傳統(tǒng)PI算法達(dá)到穩(wěn)態(tài)的時(shí)間。
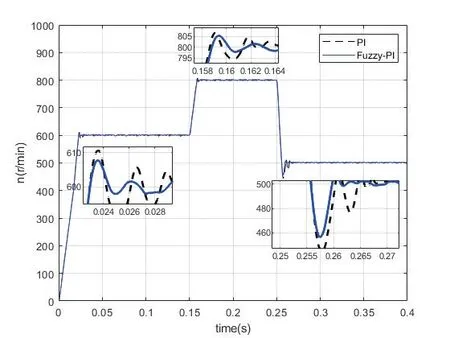
圖10 轉(zhuǎn)速跟蹤曲線
空載啟動(dòng)加速至600 r/min后,在t=0.25 s時(shí)加入12 N·m的擾動(dòng)轉(zhuǎn)矩的仿真曲線如圖11所示。可見(jiàn),從0加速至600 r/min時(shí),傳統(tǒng)PI算法達(dá)到穩(wěn)態(tài)的時(shí)間為0.026 8 s,模糊自適應(yīng)PI算法達(dá)到穩(wěn)態(tài)的時(shí)間為0.024 8 s。在t=0.25 s時(shí)加入擾動(dòng)轉(zhuǎn)矩后,傳統(tǒng)PI算法的速度降至576 r/min,模糊自適應(yīng)PI算法僅降至589 r/min,轉(zhuǎn)速波動(dòng)明顯更小。

圖11 負(fù)載轉(zhuǎn)矩突變時(shí)的轉(zhuǎn)速響應(yīng)曲線
仿真結(jié)果表明,輪轂電機(jī)采用i*d=0的矢量控制策略,速度環(huán)采用模糊自適應(yīng)PI算法調(diào)節(jié)能夠滿足小型空軌車輛對(duì)調(diào)速的高精度需求(速度的靜態(tài)誤差不超過(guò)2%,超調(diào)量不超過(guò)10%[15])。
3 結(jié)論
文中針對(duì)小型空軌車輛的設(shè)計(jì)參數(shù),對(duì)輪轂電機(jī)進(jìn)行相關(guān)計(jì)算,并根據(jù)小型空軌車輛的運(yùn)行特點(diǎn)搭建了小型空軌車輛的硬件控制系統(tǒng),并基于模糊自適應(yīng)的方法實(shí)現(xiàn)小型空軌車輛進(jìn)行車輛控制算法的分析和仿真,通過(guò)仿真結(jié)果分析,得到如下結(jié)論:
在負(fù)載轉(zhuǎn)矩恒定條件下調(diào)速,模糊自適應(yīng)PI算法的超調(diào)量最大能夠減少3%,穩(wěn)定至目標(biāo)值的時(shí)間最大能夠縮短7.4%。在空載起動(dòng)而后加入12 N·m擾動(dòng)轉(zhuǎn)矩的情況下,模糊自適應(yīng)PI算法的超調(diào)量能夠減少2.2%。基于模糊自適應(yīng)的輪轂電機(jī)矢量控制具有更好的動(dòng)態(tài)性能以及較強(qiáng)的魯棒性。