非均勻路段交通流的元胞自動機模擬
2022-11-15 05:56:50周文海李舒健董力耘
上海大學學報(自然科學版) 2022年4期
周文海,李舒健,董力耘,
(1.上海大學力學與工程科學學院上海市應用數學和力學研究所,上海 200072;2.上海市能源工程力學重點實驗室,上海 200072)
大多數城市的地面道路通過設置交通燈來均衡路網中的車流運行,減少延誤時間和尾氣污染,提高路網的通行效率.因此,與高速公路或城市快速路的連續交通流不同,地面道路交通流是受到交通燈控制的間斷交通流.間斷交通流具有與連續交通流顯著不同的性質.在高速公路上觀察到的一些自組織現象,在地面道路可能難以觀察到,這一方面是由于地面道路較短,車流無法充分演化,另一方面地面道路受交通燈的影響較大.交通燈作為城市地面道路系統的重要交通設施,對交通網絡的運行效率影響極大.合理的交通燈控制策略可以提高道路網絡的整體運行水平,因此這個問題一直是人們關注的熱點.
1992年Nagel等[1]提出了描述高速公路交通流的元胞自動機模型(NaSch模型).此后,元胞自動機模型被廣泛用于交通流的建模和模擬.國內外研究者提出了許多改進模型,如考慮慢啟動效應的VDR(velocity-dependent-randomization)模型[2].Jiang等[3]提出了交通燈控制下考慮停車時間的元胞自動機交通流模型,該模型將NaSch模型中的隨機慢化概率與停車時間相關聯(停車時間越長,慢化概率越大).李春盛等[4]的研究表明,在交叉路口設置智能交通燈,顯著提高了主干道車輛的平均速度和流量.鄭容森等[5]建立了開放邊界條件下路口等距分布的主干道交通流模型,該模型設定路口由同步交通燈控制,數值模擬結果顯示:在低密度下,流量與路口數無關;在高密度下,流量和路口路數有關;調整交通燈周期可改善主干道通行能力.Mhirch等[6]研究了開放邊界和周期邊界條件下由固定周期交通燈控制的單車道交通流模型,并給出了進車概率、出車概率、綠燈持續時間和事故發生概率的關系.Aleko等[7]提出一種連續路口模型,該模型根據動態更新在路口等待的車輛數量,對紅燈相位增加一段延時以同步連續路口主干道的綠燈相位.值得注意的是,自組織交通燈為城市地面道路交通流的優化提供了一種可行的方式,且僅需要局部道路的交通信息.Gershenson[8]發現自組織交通燈能夠自我組織并適應不斷變化的交通狀況,減少等待時間和停車數量,提高平均速度.Gershenson等[9-10]評估了自組織方法和傳統的綠波法兩種交通燈策略對于單車道網絡模型的控制效果,模擬結果表明在很大的密度范圍內,自組織方法優于綠波方法.Cesme等[11]研究了一種用于交通信號控制的范式,該范式基于局部規則創建協調機制,通過VISSIM軟件進行模擬,結果表明總體延遲減少.Zapotecatl等[12]提出了一種使用簡單的傳感器來實現自組織交通燈協調的新方法.Zou等[13]提出了一個自組織模型來設計有效的交通信號策略,研究結果表明,基于自組織的策略在排隊長度和等待時間方面都明顯優于固定策略和基于觸發的調度策略.
與連續交通流相比,從交通流模型角度研究間斷交通流的工作相對較少.目前大多數研究以單個十字路口或均勻路段的情形為主,而對于路段長度不同的多路段道路研究相對較少.在非均勻路段上如何實現綠波控制也是一個有趣而值得研究的問題.因此,本工作采用元胞自動機模型研究單車道多路段系統中非均勻路段下不同交通燈控制策略對系統的影響,并重點關注綠波現象.
1 模型和交通燈控制策略
1.1 考慮交通燈影響的細化VDR模型
日常生活中人們常能觀察到車輛的延遲啟動,這在城市地面道路交通流中尤其明顯,如綠燈剛啟亮時因司機反應遲鈍所導致的慢啟動.因此,本工作采用考慮慢啟動的VDR模型[2]為基本模型.原始VDR模型中,一個元胞的尺寸為7.5 m.一方面,車輛變速時的加速度不小于7.5 m/s2,相當于急加速或急減速,車速變化過于劇烈;另一方面,交通擁堵時車間距一般都小于車長,如果采用較大的元胞尺寸,則會導致車間距為0,無法再現真實交通中車輛在小間距下仍可起動這一現象.為了更準確地描述車輛的運動過程,本工作采用細化的元胞,即每個元胞的尺寸為1 m.此外,模型還需引入交通燈的影響.
假定第i輛車在t時刻的位置和速度分別為xi(t)和vi(t),且該車輛當前位于第n個路段,對應的路口位置為Xn,車輛的運動規則如下.
(1)確定隨機減速概率pd.

式中:p0、p1分別為靜止、運動車輛的減速概率值,且p0?p1.這表明在t時刻處于靜止狀態的車輛有更大的減速概率,平均啟動延遲時間會更久.
(2)確定車輛的間距.
當第n個路口為綠燈時,車輛可以通行,第i輛車與前車的間距為

式中:xi+1(t)是第i輛車前方緊鄰車輛的位置;lc為車輛長度.本工作中假設所有車輛長度相等,即lc為常數.當第n個路口為紅燈時,抵達路口的第i輛車不能越過停車線的位置X(n),因此其與前車的間距為

另外,綠燈轉紅燈時已經通過停車線而尚未完全越過路口的車輛不受當前紅燈的影響,繼續行駛.
(3)加速.

式中:t′表示中間時間步;vmax為車輛的最大速度或路段限速.
(4)基于安全考慮的減速.

式中:t′′表示中間時間歩;ds為安全間距.本工作采用細化的模型,因此車輛的最小間距ds不必為0.在真實交通中,即使擁堵時相鄰的車輛也會保持間距1~2 m,但在原始VDR模型中因元胞尺寸太大無法刻畫這種現象.
(5)以概率pd隨機減速.

(6)車輛的運動.

模擬中車輛的運動采取并行更新方式.由于采用周期邊界條件,研究場景為多個路段(單車道)組成的環形道路,車輛僅沿一個方向運動,且在路口也不會轉出或轉入,因此車輛數是守恒的.
1.2 交通燈控制策略
1.2.1 交通燈同相和反相
圖1所示為周期邊界條件下的多路段交通流,共有6個路段,1~6表示路口所在位置,路口所對應的上游路段用同樣的數字表示,如路段1為路口1和路口6之間的路段.假設交通燈僅有紅燈和綠燈兩種狀態,交通燈的信號周期為C,綠燈和紅燈周期分別為TG和TR,則有C=TG+TR,且綠信比λ=TG/C.假定TG=TR,則有λ=0.5,但不同交通燈之間可以有相位差.交通燈同相是指所有交通燈在任意時刻都保持同步,或同為紅燈,或同為綠燈.同相交通燈并不要求TG=TR.交通燈反相是指相鄰兩交通燈在任意時刻都處于不同的狀態,在這種情況下,必有TG=TR.

圖1 周期邊界條件下非均勻路段交通燈示意圖Fig.1 Schematic diagram of traffic lights on non-uniform road sections under periodic boundary condition
1.2.2 自組織交通燈
自組織交通燈是指根據局部交通信息動態調整紅綠燈周期的長度.綠燈期間,如果停車線后一段距離內沒有經過車輛,則可提前切換為紅燈;紅燈期間,如果車輛排隊長度超過一個閾值,就可以強制切換為綠燈[8].
本工作借鑒文獻[12]設計自組織交通燈的控制算法,由于僅考慮了單向的車流,不但給定了最短綠燈時間和最長綠燈時間,而且設定了最短紅燈時間和最長紅燈時間,其中lR、lG和lJ如圖1所示.
(1)在紅燈狀態,設置一個計數器:①當車輛排隊長度超過閾值lR且下游有足夠的空間(在交通燈前方lJ內沒有靜止的車輛)時,則切換為綠燈,否則仍保持紅燈狀態;②當紅燈周期超過時,則強制轉換為綠燈;③紅燈狀態一旦開啟,至少要保持才能切換為綠燈.
(2)在綠燈狀態,設置一個計數器:①當路口上游附近(停車線后lG范圍內)有車輛要通過路口時,則保持綠燈;②路口上游附近無車時轉紅燈,而當綠燈周期超過時,則強制轉換為紅燈;③綠燈狀態一旦開啟,至少要保持才能切換為紅燈.
1.3 交通流特征量
假設m個路段的長度均為ln,則道路總長度道路中僅有一種車輛(小轎車),在周期邊界條件下道路中的車輛數守恒,全局密度ρ表示車道上的平均擁擠程度.
考慮相鄰兩車的最小間距ds,整個車道上可以容納的最大車輛數為Nmax,全局密度為ρ,系統在每個時間步的平均速度為V(t),系統的平均速度為〈V〉,平均流量為〈J〉,則有

式中:N為當前車道上的總車輛數;Nj為路段j上的車輛數.
2 數值模擬和討論
本工作中模擬設定參數如下:最大速度vmax=15,車輛長度lc=4,安全間距ds=1,綠信比λ=0.5,靜止車輛減速概率ρ0=0.2,運動車輛減速概率ρ1=0.02.假設總路段長度L=5 400,路段數m=6,則平均路段長度lm=900,但是路段2和5的長度通常不等于平均路段長度(l2/=lm,l5/=lm,但l2+l5=2lm).表1為模擬中的路段長度分布,其中第9種情形對應均勻路段.

表1 路段長度分布Table 1 Distribution of road length
2.1 同相和反相交通燈策略
作為對比,首先給出均勻路段時平均流量隨信號周期的變化關系.根據自由行駛的車輛通過一個平均長度路段所需的時間定義暢行時間,即

Tf可以作為一個特征時間.下面主要討論信號周期為Tf整數倍的情況.
圖2為均勻路段下平均流量隨信號周期的變化曲線.由圖2(a)可以看出:低密度下平均流量隨信號周期的增加而振蕩衰減,相鄰峰值所對應的周期差值約為2Tf;當ρ=0.2,0.3時,平均流量隨C的增大而持續增加,直到信號周期很大時;對于中高密度,當信號周期足夠大時平均流量會隨信號周期的增加而明顯減小.由于交通燈反相時,總有一半是綠燈,因此低密度下信號燈切換的影響不如交通燈同相那樣明顯.由圖2(b)可以看出,在低密度下,當C>120時,平均流量是隨信號周期增加而單調下降.值得注意的是,當C=30,120時均會出現一個顯著的峰值,而在C≈60時出現一個谷值(分別對應于“完全綠波狀態”和“完全紅波狀態”),其他流量值所對應的車流狀態則介于二者之間,其狀態需要具體分析.與同相情況不同,當信號周期較大(C>240)時,高密度下平均流量隨信號周期的增加而呈增大的趨勢.因此,在較高車輛密度和長信號周期時,信號燈反相策略比同相策略更有效.Brockfeld等[14]利用ChSch模型[15]研究了均勻路網,給出了類似的結果.從交通實踐的角度考慮,對低密度車流應采用較短的信號周期,而對高密度車流應采用較長的信號周期,這樣道路的平均流量較高.
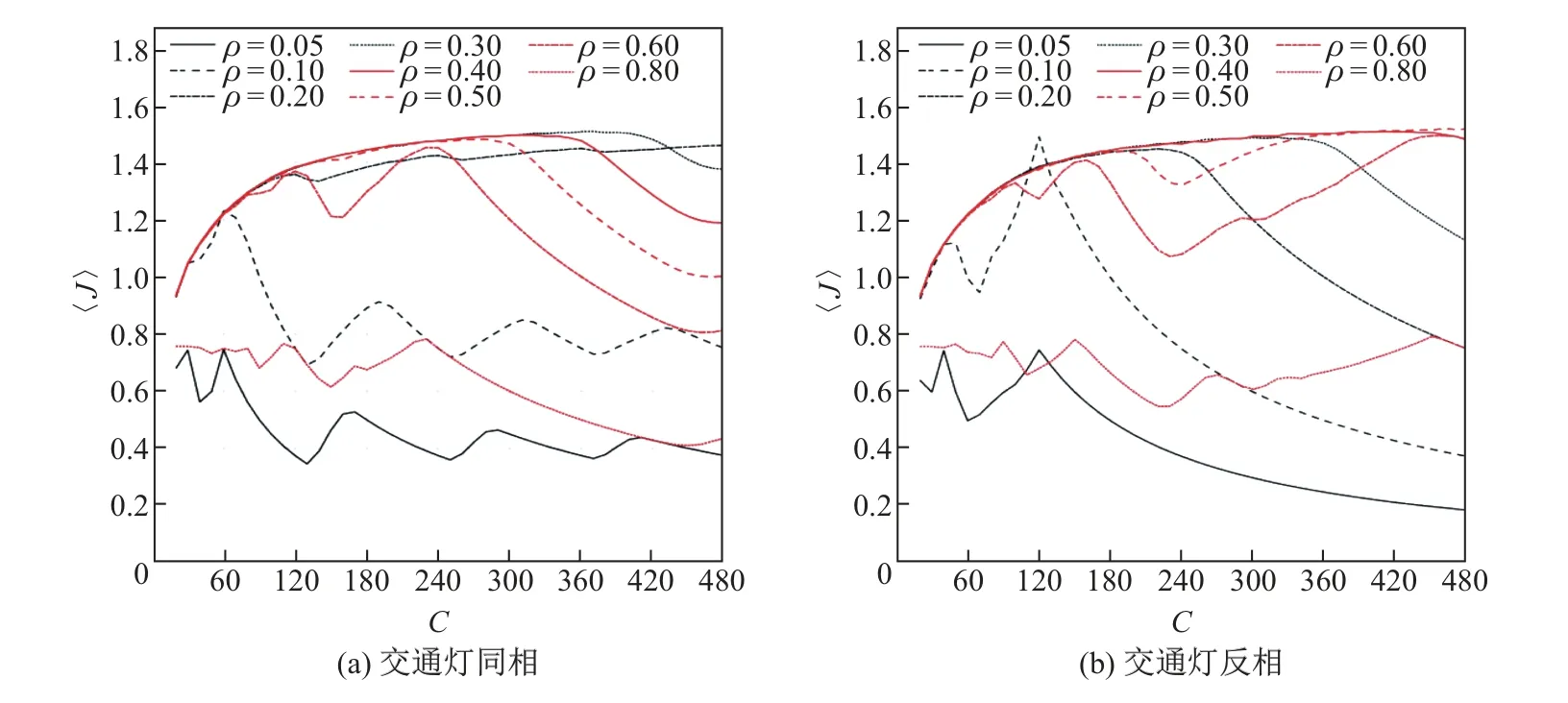
圖2 均勻路段下平均流量隨信號周期的變化曲線Fig.2 Variation of flux with signal period for uniform sections
圖3給出交通燈同相時的路段交通流基本圖,可見平均流量〈J〉和平均速度〈V〉依賴于信號周期C和相位.由圖3(a)可以看出,對于給定的信號周期C,存在臨界密度ρ1和ρ2:當ρ<ρ1時,流量隨密度近似線性增長(未飽和狀態);當ρ1≤ρ≤ρ2時,出現一個不隨密度變化的流量平臺(飽和狀態);當ρ>ρ2時,流量隨密度近似線性減小(過飽和狀態).當信號周期C≤360時,隨著C的增大,平臺流量值逐漸增大,而平臺出現的密度范圍相應減小,其中ρ1略有增大,而ρ2明顯減小.值得注意的是,當ρ<ρ1時,C=60對應的流量曲線斜率最大.從3(b)可以看出,〈V〉≈vmax對應于一種特殊的車流運行狀態(完全綠波),即車流運動與綠燈信號完全同步,車隊連續通過綠燈路口并一直不會遭遇紅燈.這是由于一旦運動中的車隊遭遇紅燈,就不可能維持這種高速運動狀態.
圖4給出交通燈反相時的基本圖.與交通燈同相時的基本圖(見圖3)相比,二者具有一些類似的特征,如出現一個流量平臺,隨著信號周期的增加,其平臺流量值增大且對應的密度范圍縮小等.但交通燈反相和同相時的基本圖也有一些不同的特征:當C=120時,在低密度下會出現完全綠波現象.對比圖3(a)和4(a)可以看到,在高密度下,交通燈反相策略更有效.由圖4(a)可見,低密度下平均流量確實隨著密度呈線性增大(平均速度為常數),而在圖3(a)中,C=120,300時的平均流量隨密度變化曲線在低密度范圍實際由兩段斜率不同的直線構成.

圖3 交通燈同相時的基本圖Fig.3 Fundamental diagrams for in-phase traffic lights

圖4 交通燈反相時的基本圖Fig.4 Fundamental diagrams for anti-phase traffic lights
典型參數下的平均速度時間序列V(t)可以描述路段交通流狀態的特征.圖5(a)和(b)分別給出了交通燈同相和反相時的兩個特殊車流狀態(V(t)≈vmax),即完全綠波狀態,參考圖3(b)和圖4(b).由于交通燈的調制作用,車隊的運行與交通燈的切換完全合拍,可以一直維持高速運動狀態.達到穩態后,車隊行進過程中所遇到的全部都是綠燈,這種狀態只有在特定的信號周期和低密度下才可能出現.如對于交通燈反相的情形,出現完全綠波狀態的密度可達ρ≈0.10.圖5(c)和(d)也是在同樣的低密度下,但對應于波谷的位置.由圖5(c)可見,綠燈時車隊啟動,然后在下一個路口遇到紅燈(典型的時停時走),這也是司機最不愿意碰到的情況之一.雖然流量是線性增長的,但是其對應車流狀態有明顯的不同.由圖5(d)雖然可以觀察到周期性結構的出現,但對應的狀態較為復雜.由于當交通燈反相時,總有一半交通燈是綠燈,因此始終會有車流在運動,低密度下不會出現平均速度接近0的情況.

圖5 典型參數下的平均速度時間序列Fig.5 Time series of mean speed with typical parameters
圖6為非均勻路段的模擬結果.可以看出:當交通燈同相時,路段長度的影響不大;而當交通燈反相時,其影響就很顯著,尤其有很短路段時.這是由于交通燈同相時,雖然有很短的路段存在,但是綠燈期間,車輛可以順利通過短路段,包括部分上游的來流.而在交通燈反相時,短路段形成一個明顯的容量瓶頸.在紅燈期間,短路段容易發生溢流,而在綠燈期間,只有短路段內的車輛可以通過路口,而上游相鄰路口處于紅燈期間,上游車輛無法進入下游路段,因而短路段的車輛通行時間不能充分利用.當最短路段長度超過約時,反相交通燈的流量-周期曲線與均勻路段情形接近(見圖2).對于復雜的道路網絡,路段長短不一,采用交通燈同相控制方式,雖然并非最佳方案,但其實際效果還是可以接受的.如果采用交通燈反相控制策略,則宜選取較小的信號周期,這樣具有較高的通行效率.

圖6 非均勻路段下平均流量隨信號周期的變化曲線Fig.6 Variation of flux with signal period for non-uniform sections
圖7和8分別給出l2=100,300時反相交通燈的路段交通流基本圖.當l2=100時,流量平臺所對應的飽和流量值隨信號周期C的增大而明顯單調減小.這與均勻路段情況時正好相反.此外,流量平臺的密度范圍明顯增大,這也是在圖6(b)中僅可明顯看到4條曲線的原因,因為ρ=0.2~0.6等所對應的5條曲線均落在流量平臺范圍內而重合.另外,可以觀察到均勻路段時的完全綠波現象消失了.即使在圖6(b)中ρ=0.05時流量-周期曲線的兩個峰值所對應的狀態也不是完全綠波狀態(見圖9).當l2=300時,不同信號周期時對應的飽和流量明顯增大,流量平臺的密度范圍縮小,可辨識的流量-周期曲線增多,在極低密度下才會出現綠波(見圖8(b)).

圖7 情形1時的基本圖(反相)Fig.7 Fundamental diagrams with anti-phase traffic light for Case 1

圖8 情形3時的基本圖(反相)Fig.8 Fundamental diagrams with anti-phase traffic light for Case 3

圖9 ρ=0.05時的平均速度時間序列(反相)Fig.9 The time series of mean speed at ρ=0.05(anti-phase)
進一步的模擬結果表明,長、短兩條路段的相對位置不同對于路段流量沒有明顯的影響.這是因為系統的流量是由瓶頸確定的,因此對于給定的路段長度集合,雖然可能有多種路段排列方式,但是只要研究一種即可.現實交通中司機可以通過選擇不同的路徑盡快到達目的地,因此在周期邊界下多路段交通流的結論不能簡單推廣到交通網絡的情形.
3 自組織交通燈策略
首先研究自組織交通燈策略下典型密度下路段的基本性質.圖10為3種情形下流量隨信號周期的變化曲線.由圖10可見,雖然3種情況下路段分布明顯不同,但是平均流量-信號周期曲線在定性上是一致的,定量差別并不明顯,這說明自組織交通燈對于道路長度變化并不敏感,其中均勻路段并無明顯的優勢,在某些情況下流量甚至低于非均勻路段.與采用固定交通燈相比,在大多數參數下,采用自組織交通燈時所對應的流量明顯增大,這表明自組織交通燈可以提高道路的通行效率.當然,這與采用自組織交通燈實際達到的綠信比有關(綠信比越大,流量也會相應增大),而在本工作中綠信比是不變的(λ=0.5).此外,由圖10還可以觀察到流量-信號周期曲線沒有明顯的周期振蕩,顯示出隨機脈動的特征,這可能與交通燈的動態調整有關,此時道路系統難以達到固定信號配時下的穩態.

圖10 3種情形下流量隨信號周期的變化曲線Fig.10 Variation of flux with signal period for three cases with self-organizing traffic lights
由于低密度下道路的平均流量更大,可以推斷此時所對應的流態可能是完全綠波狀態,如ρ=0.10時的平均流量-信號周期曲線.有趣的是,在更低密度(ρ≤0.04)時,最大速度可能更低,這可能是因為車輛數較少時,車流狀態受偶然因素影響較大.如采用固定配時的交通燈,則在很低的密度下將保持綠波狀態.圖11為自組織交通燈控制策略下3種情形時的基本圖.可以看出,3種情況下的基本圖類似,平臺流量基本隨著信號周期的增加而增大.對于均勻路段,當C=360時,流量要略低于非均勻路段.另外,由速度-密度曲線可以看出,當C=60時,會有一段高速運動區域,當C=120時,則分為不連續的兩段區域,其中速度降低的原因尚待進一步探討.

圖11 自組織交通燈控制策略下的基本圖Fig.11 Fundamental diagrams for three cases with self-organizing traffic lights
下面針對均勻路段(情形9),保持其他交通燈參數不變,研究改變最長紅燈時間對基本圖的影響.取而模擬結果如圖12所示.
由圖12可見:隨著的增加,平臺流量值不斷減小,流量平臺的密度范圍相應增大;由于采用動態交通燈,在低密度范圍,流密曲線和速密曲線變化不規則.從圖12(b)可見:當時,出現車隊以最大速度運動狀態(即“完全綠波狀態”)的密度范圍最大;而當增大,即紅燈持續的時間更久,則完全綠波狀態的密度范圍縮小,甚至不會出現.

圖12 C=120,=40,60,80,100的基本圖(均勻路段)Fig.12 Fundamental diagrams with C=120,=40,60,80,100(Uniform sections)

圖13 典型參數下的平均速度時間序列Fig.13 The time series of means peed with typical parameters
4 結束語
本工作采用元胞自動機模型研究了地面多路段道路交通流的特征,重點關注非均勻路段的情形.所采用的交通燈控制策略包括同相、反相以及自組織策略等.為了細致刻畫車輛速度的變化過程以及車輛在擁堵時仍保持一定間距等特征,采用了細化的VDR模型,其中p0=0.2,p1=0.02.這樣對車輛從靜止啟動有明顯影響,而對高速行駛車輛影響很小,更容易維持綠波狀態.數值模擬結果顯示,對于非均勻路段,當采用交通燈同相控制策略時,平均流量-信號周期曲線變化不明顯;而采用反相控制策略時,則發生顯著改變,尤其是在有很短路段的情況下.在這種情況下,難以出現完全綠波狀態.采取自組織交通燈控制策略,可以達到更高的平臺流量,在一定密度范圍內也能再現完全綠波狀態,且對于路段長度不敏感.采用自組織交通燈可以充分利用道路資源.
總體而言,由于地面路段交通流的研究中涉及較多參數,難以全面了解交通流的整體特性,在交通流的組織和優化方面有較大的難度,還需要進一步研究.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
