面向沙土環境的仿生軟體機器人及交互力學模型
2022-11-15 05:58:26齊宇燕趙永健鐘宋義
上海大學學報(自然科學版) 2022年4期
楊 揚,齊宇燕,王 舜,趙永健,鐘宋義
(上海大學機電工程與自動化學院,上海 200444)
近年來,隨著行星探測、沙漠勘測、地質調查等科學活動的不斷推進,大量機器人代替了人類工作,被應用于軟土環境中.日本千葉大學的Aoki等[1]設計開發了一種名為Tri-StarⅣ的輪式月球車,該月球車具有高效的運動能力;在輪式探月機器人的基礎上,Wakabayashi等[2]設計了一種履帶式月球探索機器人,該機器人展現出更高效的爬坡越野能力,能更好地適應松軟的地形,如沙地、泥地等;里約熱內盧聯邦大學的Dunker等[3]設計出一種仿生月球資源探測足式機器人,該機器人主要用于收集月球表土,并快速返回中央處理點;佐治亞理工學院的McInroe等[4]在對海龜的爬行方式進行模仿分析的基礎上,設計出一種具有良好的通過性能的仿海龜爬行機器人.傳統的剛性移動機器人雖然能夠利用其自身的結構特性實現高精度、高效率的運動,但是制造復雜、體積和質量較大,難以實現多自由度運動,且環境適應性較差.在覆蓋有細粒的松軟沙土面上運動時,傳統的剛性移動機器人經常因打滑、沉陷、翻倒等原因失效,甚至導致任務失敗[5].可見,有必要探索一種環境適應性強、結構簡單、易于控制,以及可平穩安全工作的移動機器人.
隨著仿生技術、新材料技術和3D打印技術的不斷發展和進步,以柔軟材料作為機體或執行器的仿生軟體機器人的研究正不斷走向成熟[6-9].加州大學圣地亞哥分校的Ishida等[10]開發出一種能夠在粗糙表面上行走的氣動軟體機器人,該機器人由3D打印軟材料制成,可以根據環境的改變來調整步態并通過障礙;佐治亞理工學院的Liu等[11]設計出一種剪紙皮軟體蠕蟲機器人,這種機器人通過結合剪紙皮與徑向膨脹的氣動執行器,模擬蚯蚓的錨定運動;哈佛大學的Tolley等[12]利用化學驅動的方式研制出一種三足柔性機器人,該機器人攜帶有燃料、氣動裝置、控制器和電池,可通過丁烷的爆炸性燃燒來驅動執行器并實現定向跳躍.與剛性機器人相比,軟體機器人在受到外界沖擊后不易損壞,具有質量小、系統安全性高、環境適應性強等特點,在醫療、軍事及探測等領域得到了廣泛的應用[13-15].此外,軟體機器人的本體大多采用3D打印、硅膠澆筑等方式來制備,成本較低.
軟體機器人的本體建模通常比較困難,并且與軟沙土的交互力學特性較為復雜,因此目前很少有學者研究軟體機器人在軟沙土上的運動特性和交互力學特性.本工作提出了一種面向沙土環境的氣動仿生軟體爬行機器人,并深入研究其在沙土上的運動機理以及與沙土之間的交互力學特性,為軟體機器人在沙土上的實用化研究提供了基礎.
1 結構設計與步態分析
1.1 結構設計
圖1為仿彈涂魚軟體機器人的結構示意圖,其結構參數如表1所示.圖1(b)為仿彈涂魚軟體機器人整體結構圖.該機器人由一個3D打印材料制成的中間集成模塊和3個硅膠制成的軟肢體模塊組成.中間集成模塊位于整體結構中心,作為機器人的軀干.3個軟肢體模塊分別位于中間集成模塊的左右兩側和后側,模擬彈涂魚的雙鰭和尾部.每個軟肢體內部開了3個氣腔,可通過調節腔內氣壓控制機器人在沙土上的運動.

表1 軟體機器人結構參數Table 1 Structural parameters of the soft robot

圖1 仿彈涂魚軟體機器人結構示意圖Fig.1 Schematic diagram of the structure of the soft robot imitating the marlin
為防止軟肢體充氣后發生徑向膨脹,本工作使用了一種纏繞在硅膠體外部的雙向螺旋纖維線(見圖1(c)).由于纖維線具有限制作用,故軟肢體只能沿著中心線產生軸向變形,可有效抑制徑向膨脹,使肢體表現出更加優越的彎曲性能.同時,本工作還提出了一種由薄型3D打印材料制成的平板鰭,可黏附在軟肢體的末端.當機器人模仿彈涂魚往沙土中壓入鰭和尾部肢體時,軟肢體帶動平板鰭插入沙土,增大了軟肢體與沙土的接觸面積,從而增大了機器人運動時所需的推力.
根據彈涂魚的運動特性,當機器人即將在沙土上前進時,身體部分抬起,其腹部與沙土的接觸面積越小,運動時產生的摩擦也越小.圖1(c)為中間集成模塊,其底部為四邊圓弧形.該設計不僅減小了機器人在運動時與沙土之間的摩擦,而且還能夠有效抑制沙土堆積.
1.2 運動步態
根據彈涂魚的運動特點,可將機器人的一個完整的運動步態分解為插入、推進、收抬、釋放這4個階段.在插入階段中,左右2個肢體豎直插入沙土并使身體底部抬起,減小行進過程中自身與沙土間的摩擦(見圖2(a));在推進階段中,左右2個肢體往后撥動沙土獲得一個向前的力,當該力大于尾部摩擦時,機器人向前推進(見圖2(b));在收抬階段中,左右2個肢體從沙土中收抬出,其空間軌跡為弧形,避免破壞除平板鰭撥動范圍外的平整沙土面(見圖2(c));在釋放階段中,左右2個肢體的腔體氣壓全部釋放,機器人回到初始狀態(見圖2(d)).這里,3個扇形組成的圓形從左到右分別表示左右2個肢體的腔體充放氣狀態,其中黃色表示腔體充氣,藍色表示腔體無氣壓.
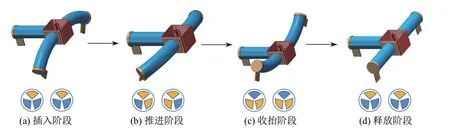
圖2 運動步態示意圖Fig.2 Schematic diagram of walking gait
2 軟體機器人-沙土交互力學建模
2.1 軟肢體主動彎曲分析
圖3(a)展示了軟肢體的截面結構參數定義.圖中,r為軟肢體半徑;r1為軟肢體氣腔扇形半徑;α為軟肢體氣腔的扇形圓心角;t為軟肢體的壁厚.
當各氣腔充入不同氣壓時,軟肢體會發生彎曲變形,且各個腔體之間存在耦合現象.本工作將軟肢體的3個氣腔簡化為3個彈簧,每個彈簧分別穿過所在氣腔的形心,與原點距離為r0,通過幾何計算可知

圖3(b)為軟肢體偏轉彎曲示意圖.軟肢體的彎曲變形為均勻連續變形,根據圖中幾何關系可得

圖3 軟肢體截面與軟肢體偏轉彎曲示意圖Fig.3 Schematic diagram of cross section and deflection and bending of soft limb

式中:l1、l2、l3為彈簧長度;φ為偏轉角;θ為彎曲角.
基于如圖3所示的軟肢體模型,根據軟體機器人建模方法[16],氣腔壓力與大氣的壓力差ΔPi和簡化模型中的彈簧軸向伸長量Δli存在線性關系,即ΔPi=ΔliK,比例系數K為

式中:E為硅膠材料的彈性模量;L為軟肢體長度.
結合式(1)~(4)可得軟肢體彎曲及偏轉模型:

2.2 軟肢體-沙土交互力學模型
基于上述軟肢體主動彎曲分析,本工作通過構建單個軟肢體與沙土的交互力學模型,表征氣壓與肢體插入力、推進力之間的關系.
2.2.1 插入階段力學交互特性
在恒定輸入氣壓下,當外力發生變化時軟肢體的形態也會發生變化.軟肢體-沙土交互作用力如圖4所示.在考慮等效沙土外力矩的作用下,力矩平衡公式可表述為

式中:Mpi為平衡氣壓力對軟肢體彎曲軸的力矩;Ma為硅膠材料彈性力對軟肢體彎曲軸的力矩;Ms為沙土對軟肢體彎曲軸的作用力矩.
結合軟肢體建模方法[16]以及式(7),軟肢體與沙土交互過程中的彎曲角可表述為

式中:Ds為平板鰭端部到身體部分的水平距離;Fs為平板鰭所受升力.
圖4為軟肢體模型.圖4(a)為軟肢體在插入階段的靜態下沉模型,其中L為軟肢體長度;H為軟肢體與身體連接處到沙土面的距離;R為軟肢體彎曲半徑;θ1為軟肢體彎曲角;r2為平板鰭尖端到肢體端部的豎直距離;h1為軟肢體在豎直方向上的彎曲距離;h為平板鰭插入沙土中的有效深度.

圖4 軟肢體模型Fig.4 Model of soft limb
由圖中幾何關系可知,平板鰭插入沙土中的深度為

在松散的沙土面上,平板鰭對沙土施加的垂直載荷主要取決于靜態下沉量.通過Bekker公式可知[17],平板鰭穿入沙土深度h處的靜態壓力p(h)為

式中:kc為沙土內聚變形模量;kφ為沙土摩擦變形模量;b為平板鰭在沙土中的插入面積;n為沉陷指數.
通過聯立式(8)~(10)可知,平板鰭所受壓力與軟肢體腔體氣壓之間的關系為

由作用力與反作用力可知,平板鰭所受升力Fs為

2.2.2 推動階段力學交互特性
由于軟肢體在與軟沙土交互過程中的變形較為復雜,因此本工作對軟肢體彎曲及偏轉模型進行近似修正,其中修正后的彎曲角θeq和偏轉角φeq分別為

式中:ξ1為彎曲角修正系數;ξ為偏轉角修正系數.
軟肢體-沙土交互過程中垂直于平板鰭側面的推力Fn可表述為

式中:Sp為平板鰭插入沙土中的有效面積;τ為平板鰭上單位面積的剪應力.
在軟肢體推動沙土的過程中,剪應力-剪切位移特性可表示為[17]

式中:p(h)為插入階段的垂直壓力;c為土壤內聚力;γ為沙土內摩擦角;h3為軟肢體末端在前進方向上的位移;k為剪切系數.
圖4(b)為軟肢體推動階段受力分析圖.軟肢體與沙土的作用面為平板鰭側面.從圖中幾何關系可知,前進方向上的推進力Ft為

聯立式(13)~(18),氣壓與推力之間的關系可表述為

2.3 機器人-沙土交互力學模型
以軟肢體-沙土交互力學模型為基礎,建立機器人在前行運動過程中的機器人-沙土交互力學模型,構建氣壓與機器人步態間的關系(見圖5).

圖5 機器人前行運動的受力分析與運動圖Fig.5 Force analysis and motion diagram of the robot during forward motion
機器人開始推進的前提條件為身體底部與沙土面剛好不發生接觸,當推進力Ft大于尾部阻力fa時機器人開始前行.
綜上所述,從圖5(a)、(b)可知,機器人在向前運動過程中需要如下條件限制:

式中:Ls為兩側肢體到尾部肢體的距離;Lm為機器人重心到兩側肢體的距離.
如圖5(c)、(d)所示,平板鰭滑動沙土后的軌跡長度M為

式中:l為平板鰭的長度.
機器人在推進過程中的位移d可表述為

式中:D為機器人滑行后平板鰭端部至機器人腹部下的距離;h2為機器人軟肢體中心連接處到沙土面的高度.
聯立式(14)、(22)~(24)以及限制條件(20)、(21),機器人位移d與氣壓之間的關系可表述為

3 實驗與討論
3.1 實驗平臺搭建
軟肢體-沙土交互力學特性的測試實驗臺是由氣源、電控減壓閥、氣壓測量傳感模塊、3維力傳感器等部分構成,由STM32控制(見圖6).軟肢體通過導氣管與電控減壓閥的端口相連.氣壓傳感模塊通過導氣管與軟肢體氣腔相連并安裝在STM32上.3維力傳感器一側安裝軟肢體,另一側通過T型板固連在移動臺上.氣壓傳感模塊將測得的氣壓值反饋給STM32.當軟肢體與沙土交互時3個方向上的力由3維力傳感器測量并記錄.

圖6 軟肢體-沙土交互力學特性測試實驗臺Fig.6 Testbed for testing interaction force characteristics of the robot and sand
3.2 實驗設置
3.2.1 軟肢體實驗設置
(1)插入階段.實驗過程中僅對軟肢體上腔體輸入0~80 kPa的氣壓,每次遞增4 kPa.記錄軟肢體在整個過程中的插入力與氣壓以驗證模型的準確性.
(2)推動階段.首先,預設軟肢體上腔氣壓為48 kPa;然后,軟肢體右腔體單次遞增4 kPa的氣壓,直到80 kPa,通過測得的氣壓值與力傳感器反饋的推力值可以驗證模型的有效性.
3.2.2 機器人實驗設置
機器人開始向前推進的前提條件為身體底部與沙土面剛好不發生接觸.機器人整體質量為150 g,通過如式(20)所示的限制條件可知,身體抬起時所需豎直力分量為1 N,因此機器人向前推進以左右2個軟肢體在豎直方向上的合力達到1 N為前提條件.
在推進階段實驗前,給左右2個軟肢體分別通入0~48 kPa的氣壓,單次遞增4 kPa.通過氣壓傳感模塊和相機分別記錄在該過程中機器人的氣壓值和底部抬起高度.
在完成前行運動插入后,保持軟肢體上腔體氣壓大小不變,對左軟肢體右腔體和右軟肢體左腔體同時輸入0~80 kPa的氣壓,單次遞增4 kPa.通過氣壓傳感模塊和相機分別記錄該過程中機器人的氣壓值和位移量.
3.3 實驗結果與討論
3.3.1 軟肢體實驗結果
軟肢體插入階段氣壓-升力關系如圖7(a)、(b)所示.從實驗結果可以看出,升力Fs隨氣壓的增大逐漸增大,且實驗數據與模型具有較高的吻合度.圖7(c)、(d)展示了軟肢體在插入階段氣壓設定為48 kPa時推動沙土過程的實驗結果.

圖7 軟肢體插入階段和推動階段的實驗Fig.7 Experiments of soft limb insertion stage and pushing stage
從實驗結果可以看出,推力Ft隨氣壓的增大而增大.圖中出現的推力突變是由軟肢體滑破沙土導致的,極限氣壓為68 kPa.圖7(a)中實驗與模型間出現誤差的主要原因是腔體間存在耦合,插入階段氣壓越大,推動階段受影響越大.
3.3.2 機器人實驗結果
圖8為前行運動的插入階段與推進階段實驗.圖8(a)中,當輸入氣壓達到48 kPa后,機器人身體底部與沙土面分離.在軟肢體插入階段實驗中,當氣壓為48 kPa時,升力Fs為0.5 N,通過計算可知兩側軟肢共同產生的升力可將機器人身體部分抬起.
從圖8(b)的實驗結果可知,在推進階段過程中,當腔體氣壓小于32 kPa時機器人沒有發生位移,推力一直小于尾部摩擦阻力;當腔體氣壓在32~62 kPa之間時,機器人開始向前移動,位移隨氣壓增大而增大,且最大為5 cm,推力在此階段一直大于尾部摩擦阻力;當腔體氣壓大于62 kPa時,機器人位移不再隨氣壓增大而改變,這是由于隨著肢體偏轉角度的增大,機器人重心發生前移,導致身體部分接觸沙土,推力小于整體摩擦力.而平板鰭在氣壓不斷增大的情況下繼續滑動沙土,直至滑破沙土.此外,可以看出理論值和實驗值有一定的誤差,推斷為忽略了平板鰭上的摩擦以及軟肢體纖維線的作用所致.

圖8 前行運動的插入階段與推進階段實驗Fig.8 Experiments of insertion stage and pushing stage during forward movement
在軟肢體推動階段實驗中,推力在36 kPa時為0.05 N,機器人前行時尾部摩擦阻力為0.1 N,在兩側軟肢體共同作用下,機器人克服摩擦向前移動,且最大氣壓為68 kPa.
綜上所述,軟肢體插入階段與機器人插入階段使機器人身體抬起時的氣壓大小一致,皆為48 kPa;軟肢體推動階段使機器人產生位移的氣壓范圍為36~68 kPa,與機器人推動階段產生位移的氣壓范圍32~62 kPa基本一致.因此,軟肢體插入階段模型與軟肢體推動階段模型可以作為機器人推進運動的限制條件,且機器人單次有效位移范圍為0~5 cm.
4 結束語
本工作在對彈涂魚進行結構分析與模仿的基礎上,設計了面向沙土環境的軟體機器人結構,并對機器人的運動步態進行了設計分析;通過對軟肢體與沙土交互力學特性分析,創新性地建立了軟肢體-沙土交互力學模型,用于描述在交互過程中腔體氣壓與肢體末端升力、推力間的關系.在此基礎上,本工作還建立了機器人-沙土交互力學模型,用于描述腔體氣壓與機器人位姿變化間的關系,以此預測分析機器人的運動情況.最后,通過實驗分析得出該模型的準確性以及機器人與沙土交互時運動的可靠性.實驗結果表明,本工作研發的機器人環境適應性強,控制簡單,具有良好的實用價值.此外,所提出的力學模型與實驗結果吻合度較高,表明了本模型的先進性.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
