步進電動機驅動器的電流衰減仿真分析
2022-11-18 10:17:14葉鵬,官濤
微特電機 2022年11期
葉 鵬,官 濤
(中國電子科技集團有限公司第二十九研究所,成都 611730)
0 引 言
步進電動機是一種將電脈沖信號轉換成角位移的執行元件,其位移與輸入的脈沖數成正比,無累計誤差,并依靠電磁力鎖定電機軸。步進電動機在開環控制方式下也能獲得較高精度,它大量應用在中低端伺服控制領域的輕負載場合,如打印機、小型雷達轉臺等。同時,步進電動機相比于無刷直流電機,具有機械結構簡單可靠、控制算法簡單的特點,因此在高可靠性的航天領域也廣泛應用,如衛星天線的指向機構等[1]。
目前,步進電動機的控制技術以細分驅動恒流斬波為主,細分驅動技術可以提高步進角度分辨率、減小振動、改善低頻特性[2]。文獻[3-6]對該方法進行了深入研究,但很少涉及恒流斬波時電流的衰減模式對步進電動機控制的影響。本文利用Simulink軟件搭建二相混合式步進電動機的驅動控制模型,研究不同衰減模式對步進電動機的驅動電流紋波的影響。
1 步進電動機驅動原理
1.1 二相混合式步進電動機數學模型
二相混合式步進電動機電壓平衡方程(忽略各相繞組的互感現象)[6]:
(1)
式中:Ua、Ub分別是步進電動機的二相電壓;ia、ib分別為二相電流;R為電機繞組電阻;L為電機繞組電感;Km為反電動勢系數;ω為電機轉速;θ為旋轉角度;Nr為轉子齒數。
步進電動機轉矩方程[7]:
(2)
電機轉速與角度關系:
(3)
1.2 細分控制與電流衰減原理
細分驅動技術是將步進電動機的一個步距角細分成若干步,通過對電流的控制使電機的合成磁場大小不變,均勻旋轉,從而保持電磁轉矩穩定。二相步進機的兩相電流與轉子位置之間的關系滿足下式[8]:
(4)
細分后電機A、B相繞組的電流如圖1所示。
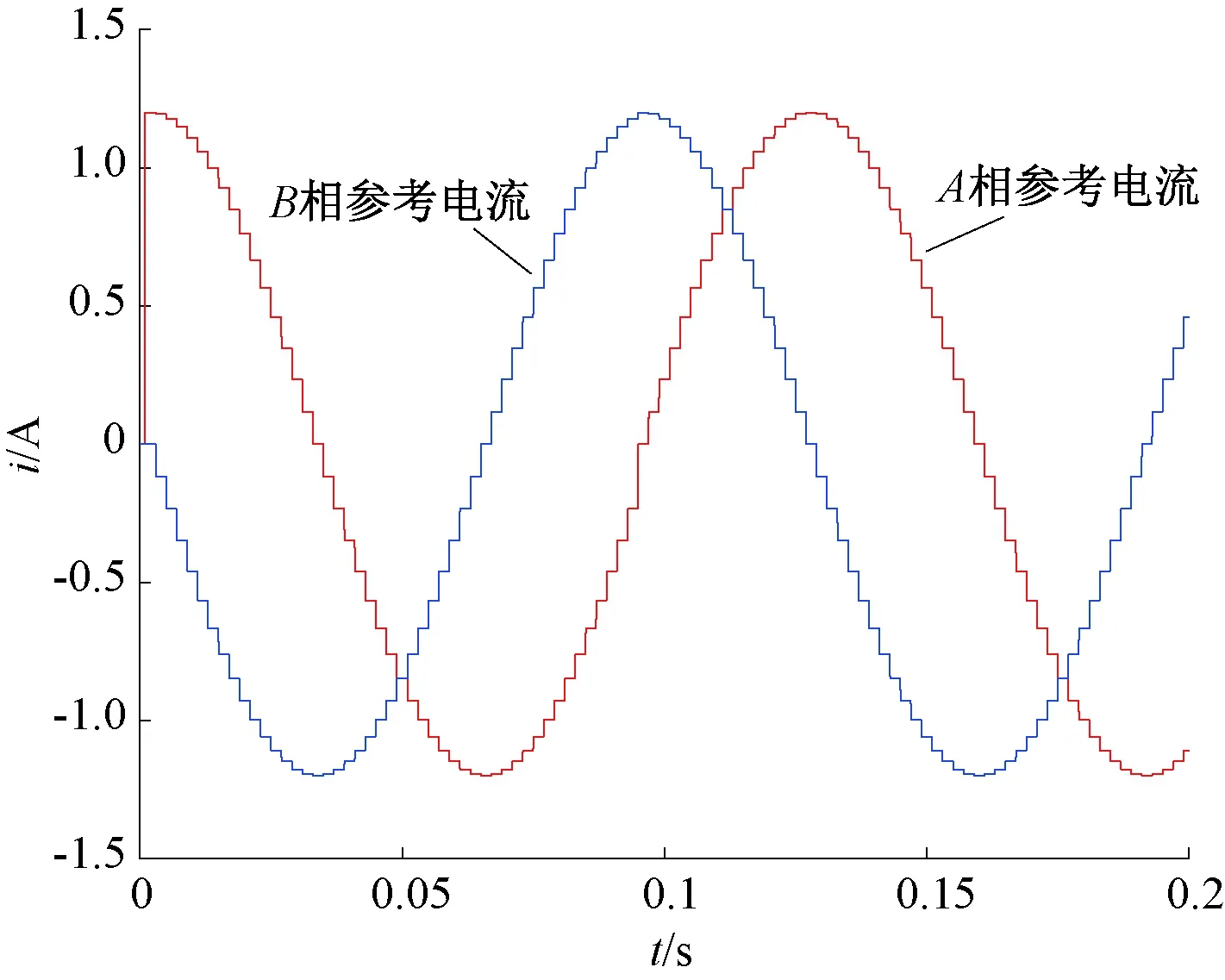
圖1 16細分參考電流曲線
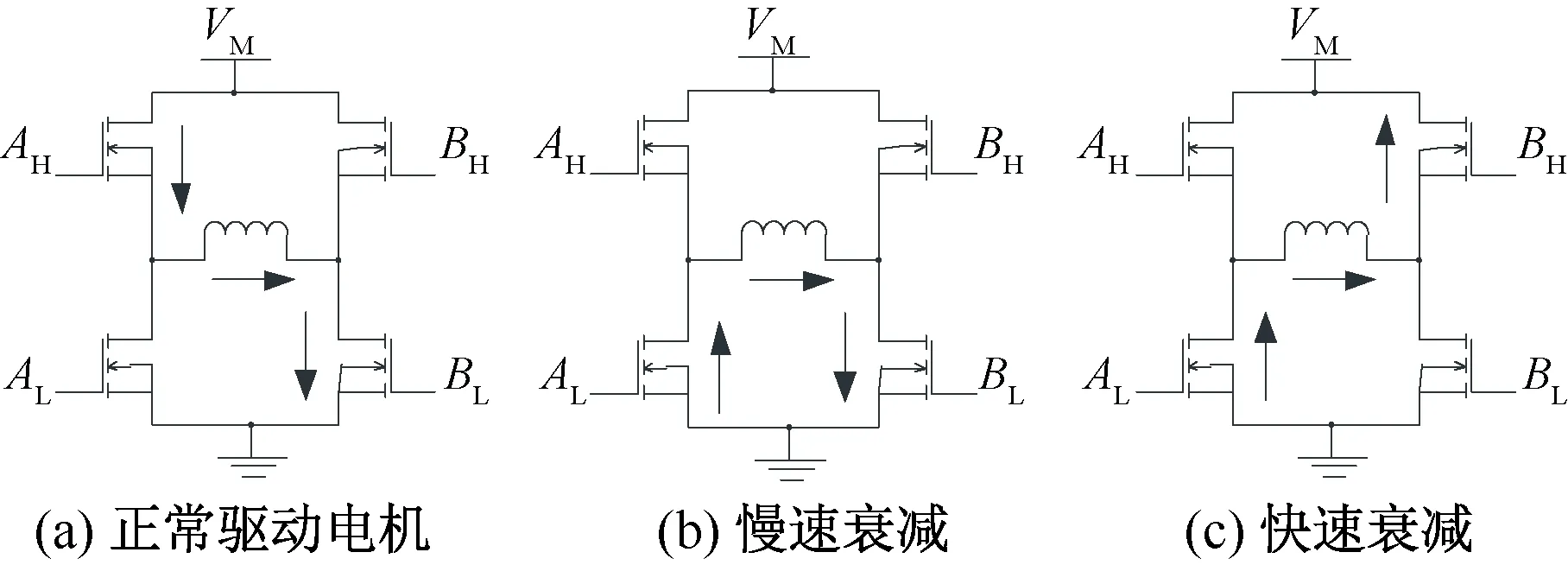
圖2 H橋電路拓撲結構
細分控制通常使用恒流斬波的方式實現,通過控制H驅動橋的通斷,調整流過電機線圈的電流。對于一個全橋電路如圖2(a)所示,電機繞組正常供電時,電流從母線正極經A半橋的高側開關管、電機繞組和B半橋的低側開關管回流至母線負極,形成回路。當流經繞組的電流達到細分電流的閾值時關閉開關管,由于電機繞組是感性負載,當禁用H橋或施加了反相電壓極性,電流需要保持原方向的流動,開關管通常是并聯的體二極管,提供電流通路,因此使用開關管的導通電阻作為電流衰減的安全路徑更為有效。從H橋電路的拓撲結構可知,具有兩條通路可以提供電流衰減路徑。如圖2(b)所示,關閉H橋的兩個高側開關,打開兩個低側開關,這種模式稱之為慢速衰減;如圖2(c)所示,打開對側的開關管,這種模式稱之為快速衰減。在快速衰減模式下,當電流衰減至零時,要及時關閉高側開關,避免電流反向流動。在電流衰減過程中通過控制開關管,使電流先快速衰減,然后再慢速衰減,這種模式稱為混合衰減。
2 建立仿真模型
利用Simulink軟件,通過仿真研究不同衰減模式對步進電動機驅動電流的影響。利用Stateflow和Simscape工具箱搭建如圖3所示的步進電動機驅動模型。模型由步進脈沖發生器、環形脈沖計數模塊、驅動橋控制模塊、驅動及電機模塊組成。仿真參數如表1所示。
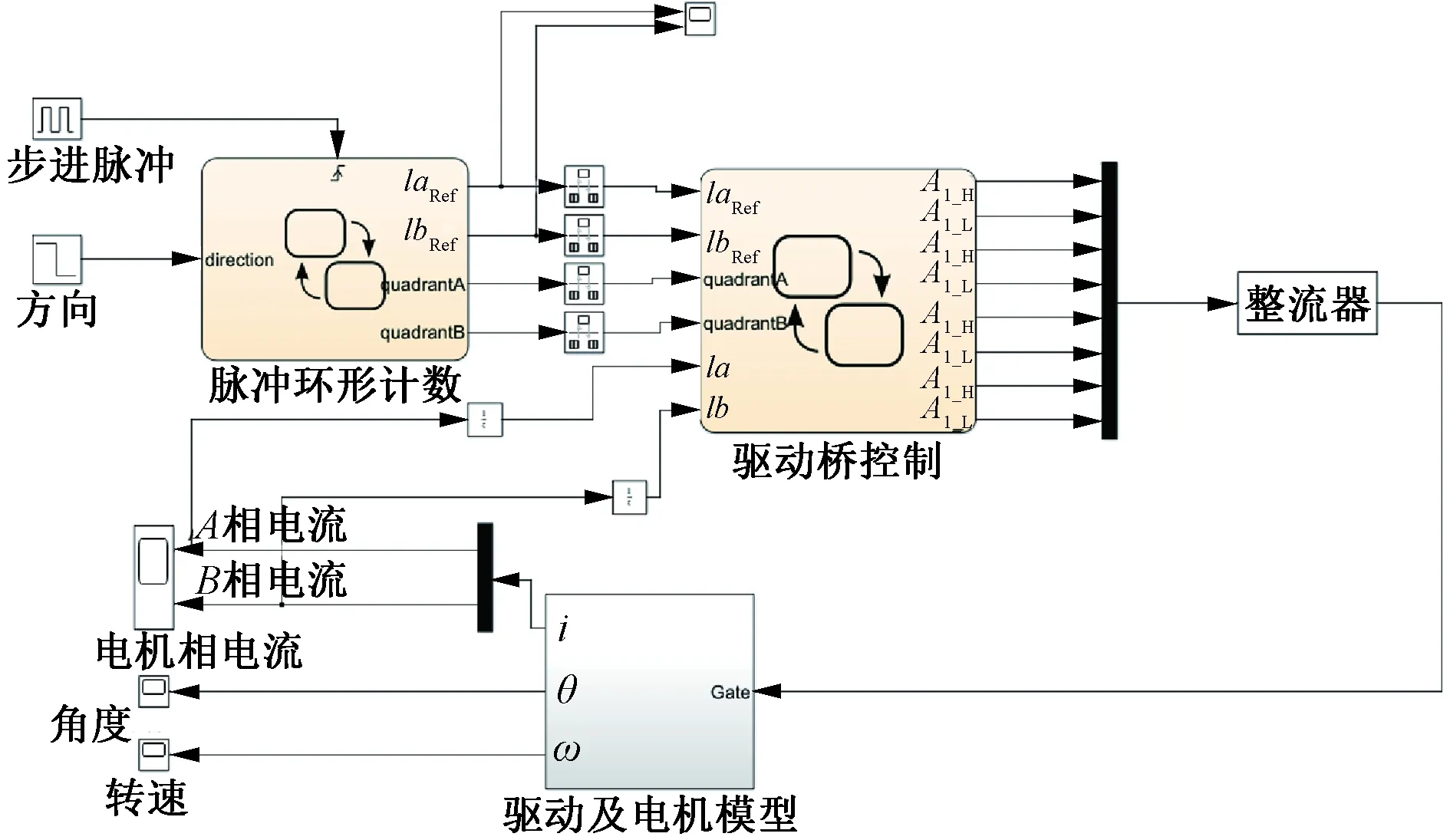
圖3 仿真模型總體結構
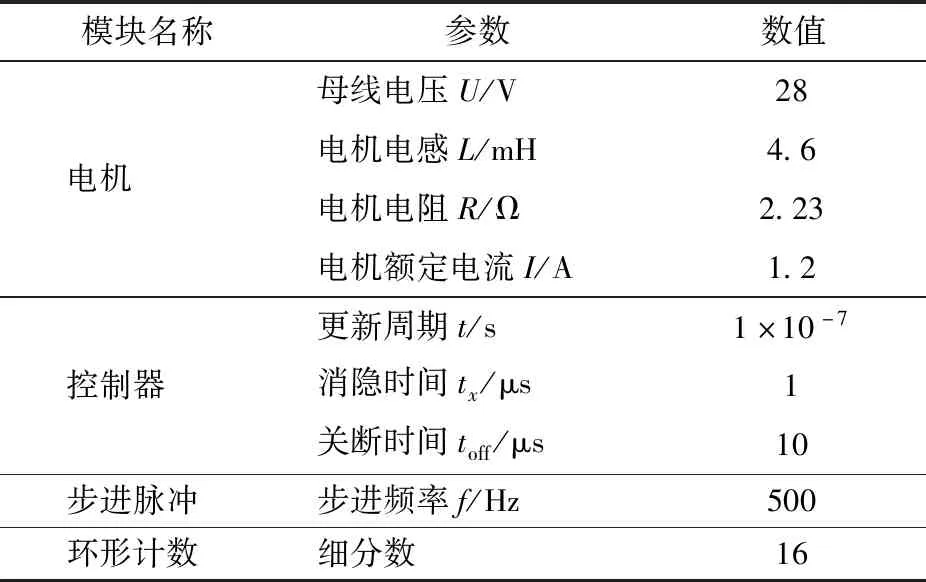
表1 仿真模型參數
環形計數模塊主要實現16細分步進計數,并根據正余弦函數,生成相應微分步的A、B兩相電流參考值,并送給驅動橋控制模塊。
驅動橋控制模塊,通過利用Stateflow的狀態機實現對H驅動橋的恒流斬波控制。其原理如下:通過采集電機繞組的兩相電流,將其與環形計數模塊輸出的電流參考值進行比較,當實際相電流小于參考電流時未觸發電流門限(Itrip=1),則打開驅動橋,直到實際相電流大于參考值時觸發電流門限(Itrip=1),此時關閉電橋。具體的邏輯狀態轉移見圖4所示。其中消隱狀態與驅動狀態均為電橋正常導通狀態,消隱狀態是為了避免開關管打開時的電流噪聲,等待1 μs,進入驅動狀態后開始比較繞組實際電流與參考電流,繞組電流達到設定的參考閾值時,H橋進入關斷狀態。快速衰減與慢速衰減狀態為H橋關斷狀態,提供電流再循環的回路,仿真中關斷狀態時間固定,通過分配快速衰減和慢速衰減的時間占比,實現不同衰減模式的驅動仿真。
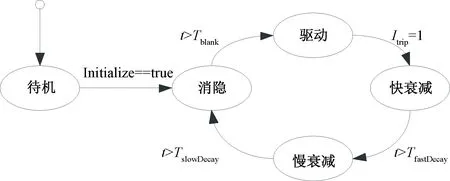
圖4 驅動橋控制模型狀態機
驅動及電機模塊利用Simscape工具箱中的IGBT元件搭建2個H全橋驅動電路,并驅動步進電動機,模型如圖5所示。
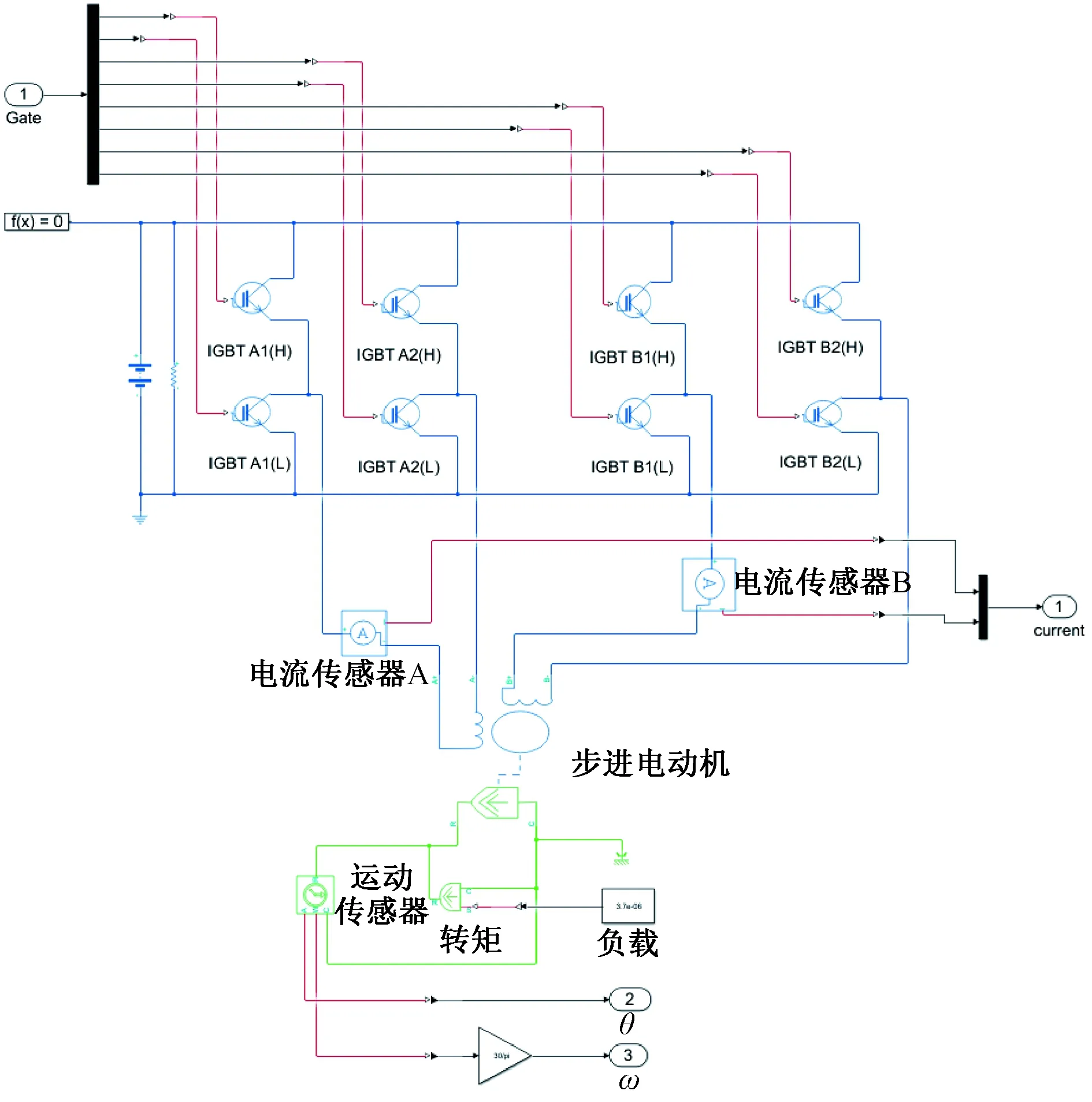
圖5 驅動及電機模型
3 仿真結果分析
3.1 慢速衰減模式
仿真中將快速衰減模式的時間占比設置為0,即在H橋關斷期間全部使用慢速衰減,得到的仿真結果如圖6所示。從圖6可知,慢速衰減模式下,電流在下降階段無法很好地跟隨給定的正余弦電流參考值。這是由于慢速衰減模式下電流下降較慢,造成電流在下降階段出現畸變,這種失真容易造成電機的振動和轉矩的不平順性。
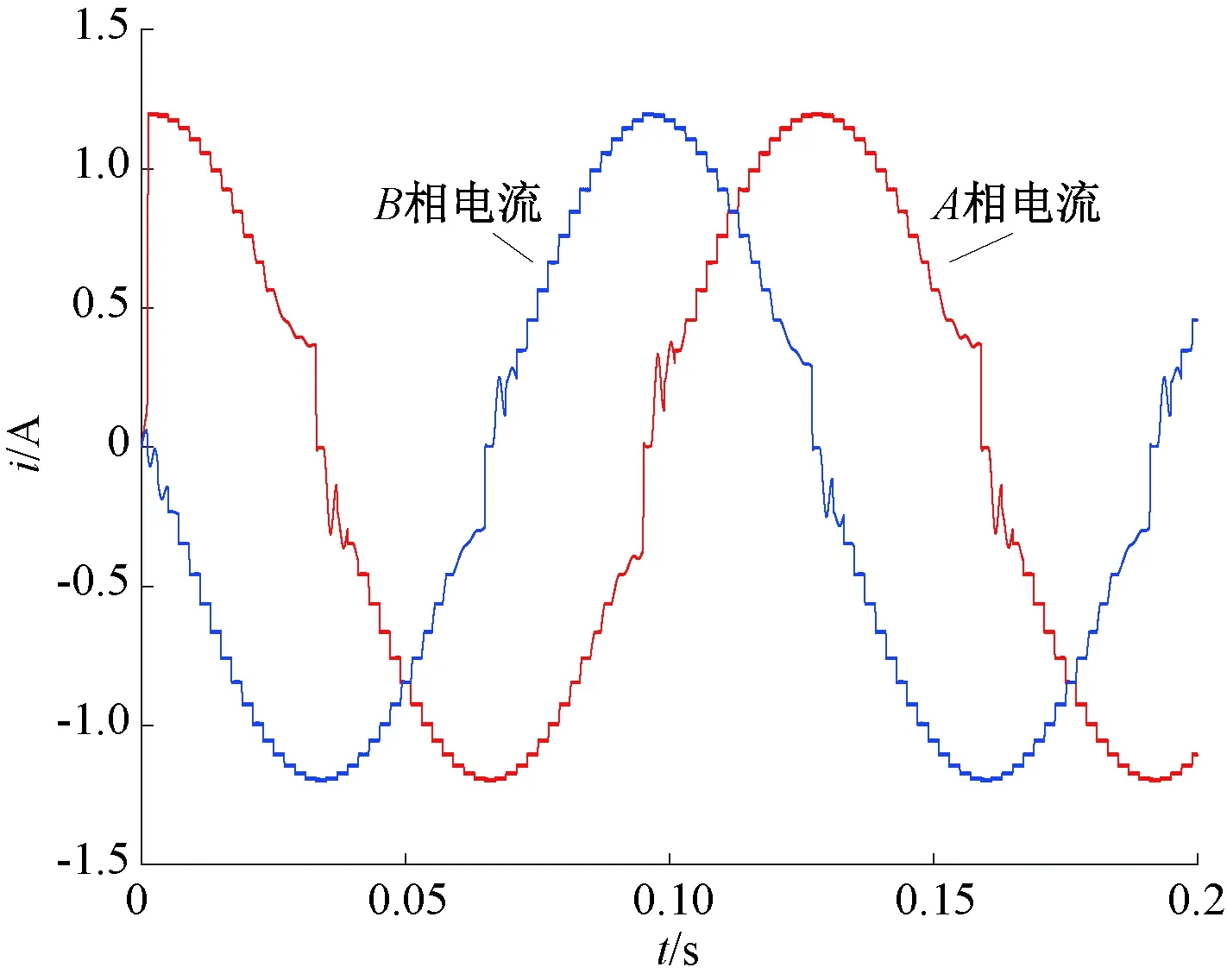
圖6 慢速衰減電流波形
圖7顯示了在慢速衰減模式下細分階段電流的紋波,紋波大小在0.007 A左右。

圖7 慢速衰減A相電流紋波
3.2 快速衰減模式
仿真中將快速衰減模式的時間占比設置為100%,即在H橋關斷期間全部使用快速衰減模式,得到的電流波形如圖8所示,電流紋波如圖9所示。從圖8、圖9可知,快速衰減模式下,電流雖然可以跟隨正弦參考值,但是電流的紋波顯著增大,在0.06 A左右,比慢速衰減的紋波增大了一個數量級,較大的紋波會產生較高的電磁噪聲,不適用于電磁敏感的場合。
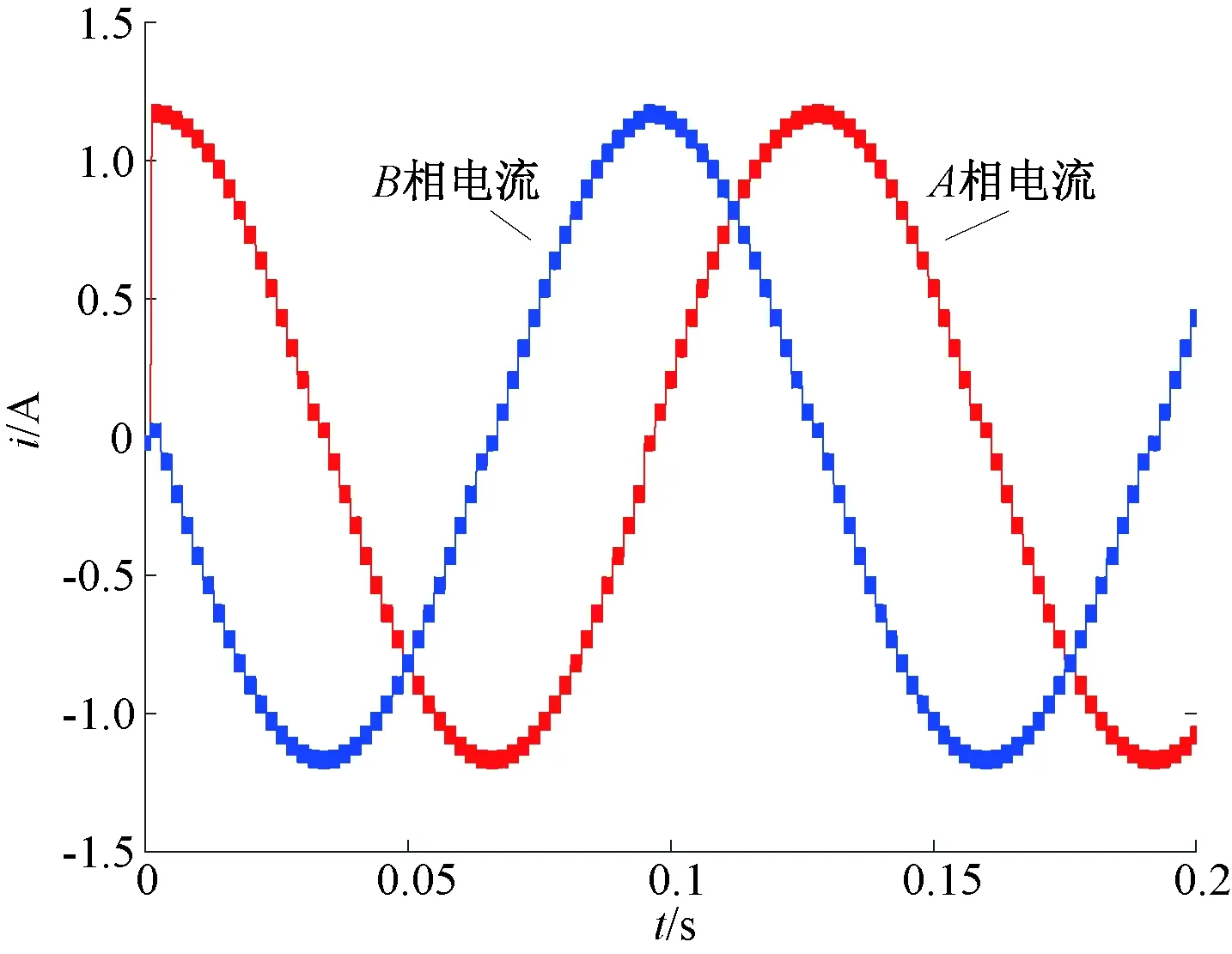
圖8 快速衰減電流波形

圖9 快速衰減A相電流紋波
3.3 混合衰減模式
仿真中將快速衰減模式的時間占比設置為30%,在H橋關斷器件先進行3 μs快速衰減,再進行7 μs慢速衰減,得到結果如圖10、圖11所示。圖11中的電流紋波明顯展示了混合衰減模式下的電流變化情況,電流上升是打開H橋的驅動狀態,達到電流參考閾值之后,進入關斷狀態,電流開始衰減,先進行快速衰減,再進行慢速衰減。快速衰減模式下電流的下降斜率明顯大于慢速衰減模式下電流的下降斜率。從圖10可知,在30%的混合衰減模式下,電流可以較好地跟隨正弦參考值,電流紋波也較小,在0.02 A左右。
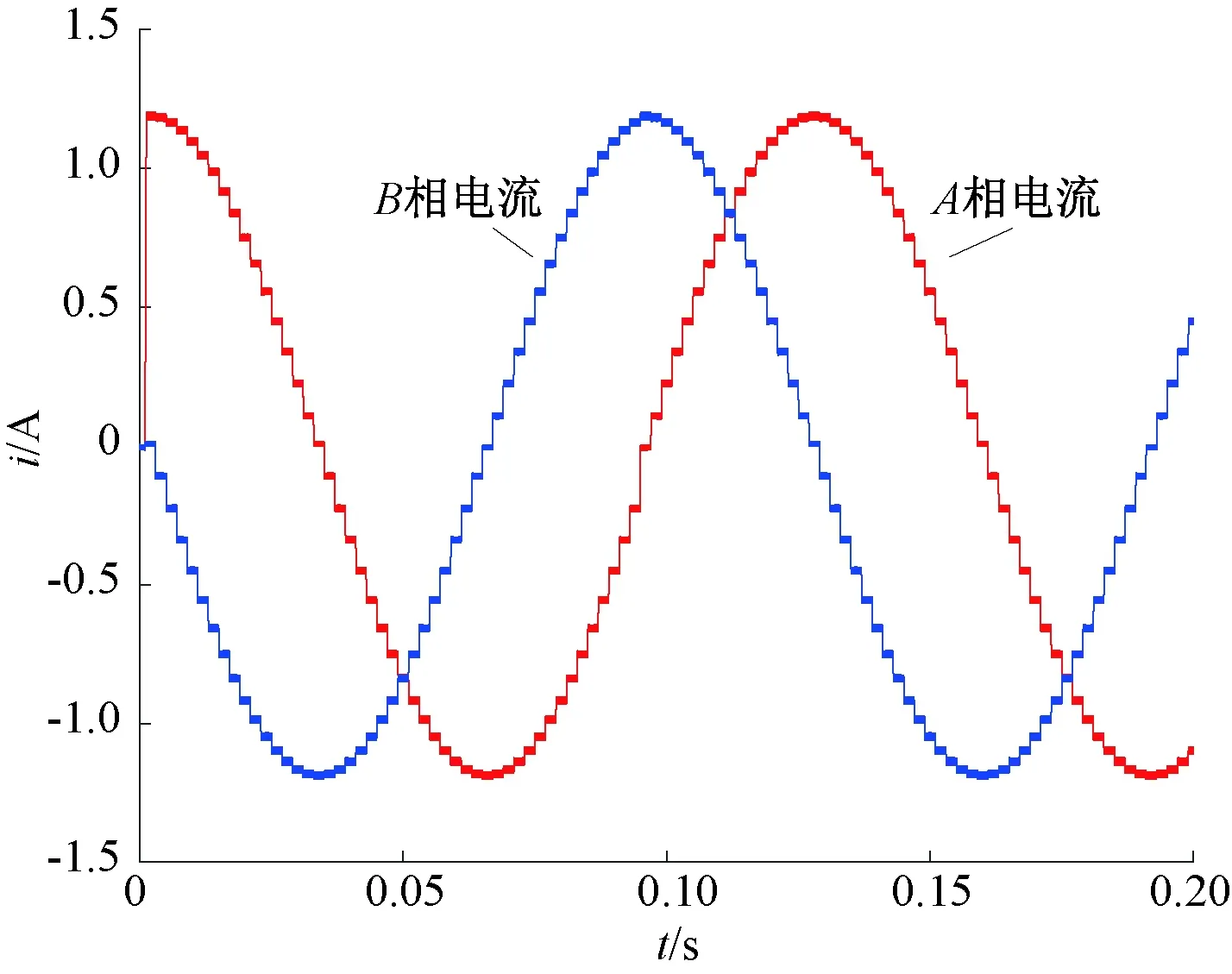
圖10 30%混合衰減電流波形
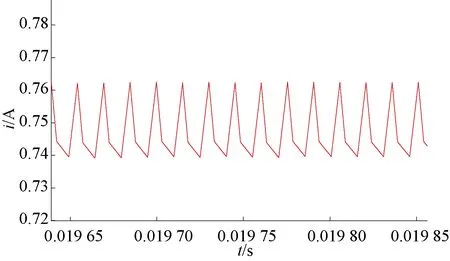
圖11 30%混合衰減A相電流紋波
4 結 語
本文對步進電動機驅動器的電流衰減原理進行分析,通過電流衰減控制策略的實現方法,搭建了Simulink仿真模型,仿真結果表明,利用混合衰減模式不僅可以實現電機繞組電流穩定跟隨正弦參考值,而且相對于快速衰減模式,可以獲得較小的電流紋波。混合衰減對步進電動機的微步驅動有重要的意義,使步進電動機運行更加平穩,減少了振動以及電磁輻射。
