永磁同步電機雙矢量無權重模型預測轉矩控制
2022-11-18 09:38:08陳商玥
微特電機 2022年11期
陳商玥,高 強,陳 愚
(1.天津理工大學 電氣電子工程學院,天津 300380;2.國網天津市電力公司 城西供電分公司,天津 300110;3.天津中德應用技術大學 智能制造學院,天津 300350)
0 引 言
永磁同步電機(以下簡稱PMSM)驅動器高性能控制的主要控制策略為磁場定向控制和直接轉矩控制[1]。模型預測控制(以下簡稱MPC)以其動態響應快、可直接控制多個目標等優點,被應用于電機控制領域[2]。
MPC可分為模型預測電流控制和模型預測轉矩控制[3]。與模型預測電流控制相比,模型預測轉矩控制目標函數包含轉矩分量和磁鏈分量,能夠直接控制轉矩控制。由于轉矩與磁鏈量綱不同,需在目標函數加入權重系數以平衡轉矩和磁鏈的影響程度。然而權重系數需要不斷調整,繁瑣且耗時[4]。
為了消除權重系數,文獻[3]通過轉矩和磁鏈無差拍求出最優電壓矢量,構建基本電壓矢量和最優電壓矢量之差的目標函數,消除了量綱。文獻[5]的目標函數為定子磁鏈矢量誤差,無需權重設計。文獻[6]計算不同基本電壓矢量作用下的轉矩和磁鏈誤差,分別對轉矩和磁鏈誤差排序,選擇排序后序號之和最小值對應的基本矢量作為最優矢量。文獻[7]提出一種級聯MPC方法,根據控制變量的優先級,先選擇使優先級最高的控制變量預測誤差最小的基本矢量組合,再從中選擇使優先級次之的控制變量預測誤差最小的矢量作為最佳矢量,但該方法未說明矢量集合的一般選取方法。文獻[8]在文獻[7]的基礎上比較了先對磁鏈誤差排序再對轉矩誤差排序和先對轉矩誤差排序再對磁鏈誤差排序的優劣。文獻[7-8]沒有給出當同時存在兩個最小值時最優矢量的選取方法。文獻[9]分別選擇使得轉矩和磁鏈誤差最小的三個基本矢量,再從兩組基本矢量中選擇共有的基本矢量作為最佳矢量。此外,還可以通過構建控制變量的鏡像表達式[10]、歸一化[11]等方法消除權重系數。
傳統的模型預測轉矩控制一個控制周期只作用一個基本矢量,轉矩和磁鏈脈動較大。為提高穩態性能,占空比控制被應用于模型預測轉矩控制,傳統方法首先通過目標函數選出最優矢量,然后再計算占空比[12],所選電壓矢量的目標函數值不一定最小,且目標函數仍包含權重。文獻[13-14]分別通過目標函數最小化、轉矩誤差積分最小化求解矢量作用時間。文獻[15]將兩個備選矢量兩兩組合,提高了穩態性能,但是計算量較大。文獻[16]將查表法得到的備選矢量和所有基本矢量兩兩組合,和文獻[15]相比計算量雖有所減小,但矢量覆蓋的區域有重復,計算量仍然較大。文獻[17]通過轉矩和磁鏈誤差的大小確定備選矢量,目標函數為轉矩無差拍矢量作用時間和磁鏈無差拍矢量作用時間之和。文獻[18]選取第一個矢量的方法和文獻[16]相同,第二個矢量從第一個矢量相鄰的矢量及零矢量中選擇。文獻[19]通過磁鏈矢量的增量所在扇區來確定備選矢量組合,減小了計算量;占空比通過轉矩和磁鏈幅值無差拍確定。此外,增加備選矢量亦可提高穩態性能[20]。
為了消除權重系數,本文將轉矩誤差和磁鏈誤差轉換到α,β坐標系下,構建以矢量到轉矩誤差直線和磁鏈誤差圓的距離之和的目標函數。仿真和實驗驗證了本方法的有效性和可行性。
1 數學模型
兩電平電壓源逆變器驅動PMSM系統拓撲如圖1所示。圖1中,udc表示直流電壓,Cdc表示直流側紋波吸收電容,S1~S6構成了三相電壓型逆變橋,ia、ib、ic表示三相PMSM定子電流。
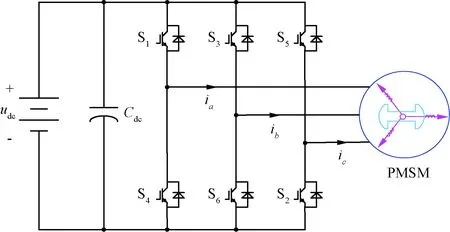
圖1 三相電壓源型逆變器PMSM驅動系統拓撲結構
兩電平電壓源逆變器共有8種開關狀態,對應8種基本電壓矢量,其空間分布如圖2所示。
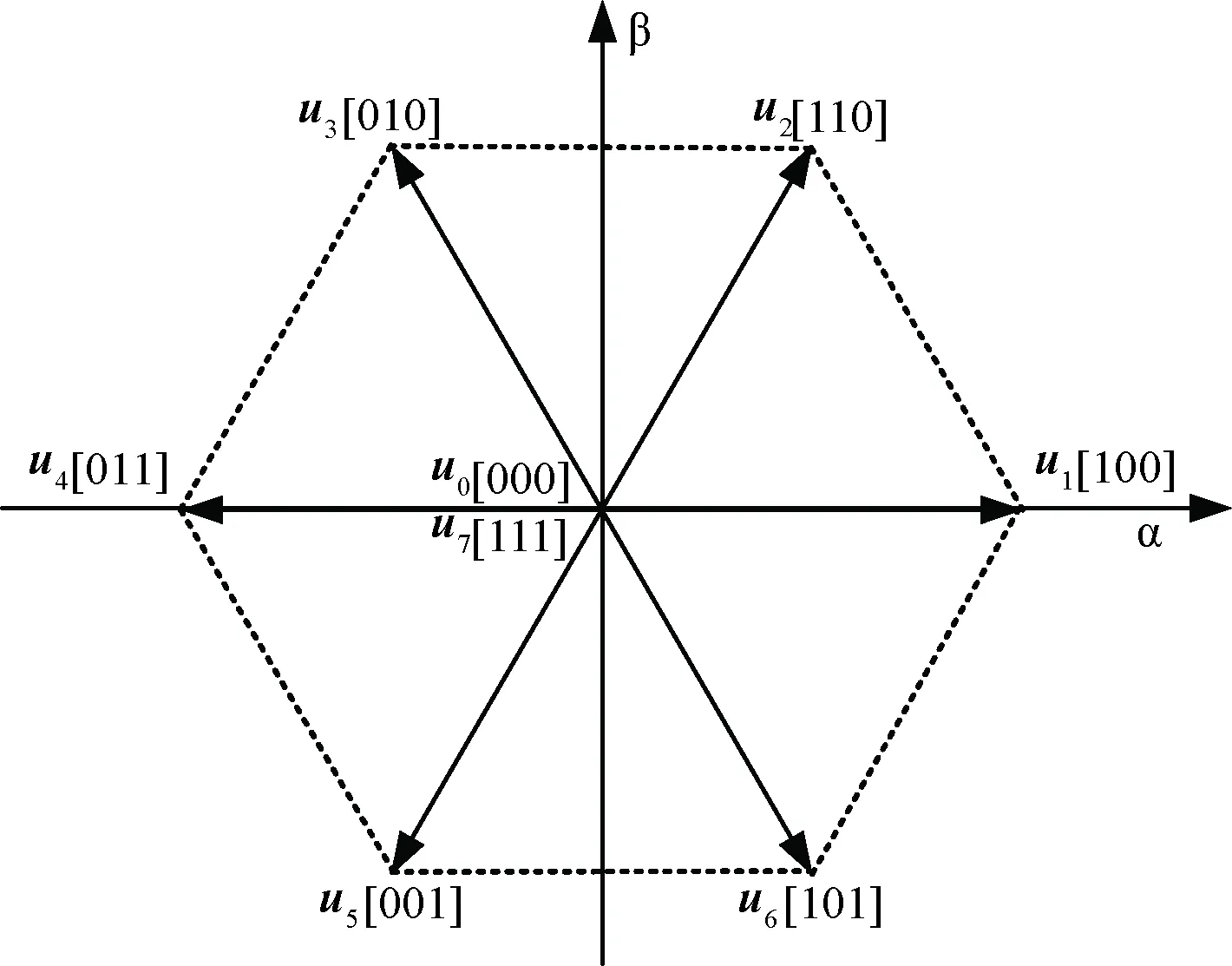
圖2 矢量空間分布圖
兩相旋轉坐標系下,PMSM電壓方程可表示:
(1)
(2)
式中:Rs,ωe分別表示定子電阻和電角頻率;ud,uq表示d,q坐標系下定子電壓;id,iq表示d,q坐標系下定子電流;ψd,ψq為d,q坐標系下定子繞組磁鏈,其表達式:
ψd=Ldid+ψf
(3)
ψq=Lqiq
(4)
式中:Ld,Lq為d,q坐標系下的等效電感;ψf為永磁體磁鏈。
d,q坐標系下的轉矩和磁鏈方程:
(5)
(6)
式中:p為極對數。
采用一階歐拉公式得到id、iq預測公式:
(7)

(8)
(9)
(10)
式中:id(k)、iq(k),ud(k)、uq(k)分別為kTs時刻d,q坐標系下定子電流、定子電壓;id(k+1),iq(k+1)分別為(k+1)Ts時刻d,q坐標系下定子電流預測值;Te(k+1),ψs(k+1)分別為(k+1)Ts時刻轉矩和磁鏈預測值;Ts為采樣周期。
2 傳統預測轉矩控制
傳統單矢量模型預測轉矩控制代價函數如下:
g=|Teref-Te(k+1)|+λ|ψsref-ψs(k+1)|
(11)
式中:Teref與ψsref分別表示轉矩與磁鏈的給定值。ψsref表達式:
(12)
將8個基本電壓矢量代入式(7)~式(11),選擇使g最小的基本電壓矢量,輸出給逆變器。
對轉矩和磁鏈單獨定義代價函數,表示如下:
gTe=|Teref-Te(k+1)|
(13)
gψ=|ψsref-ψs(k+1)|
(14)
傳統占空比預測轉矩控制(以下簡稱Duty-PTC)先通過目標函數選擇最佳有效矢量uopt,再通過轉矩無差拍的原則計算uopt的占空比,不能保證uopt全局最優。如圖3所示,通過目標函數選擇的最佳矢量為u2,由于u0作用效果的方向為斜向下,但其作用時間為零,則u2和u0合成矢量為u2,此時誤差仍然存在。
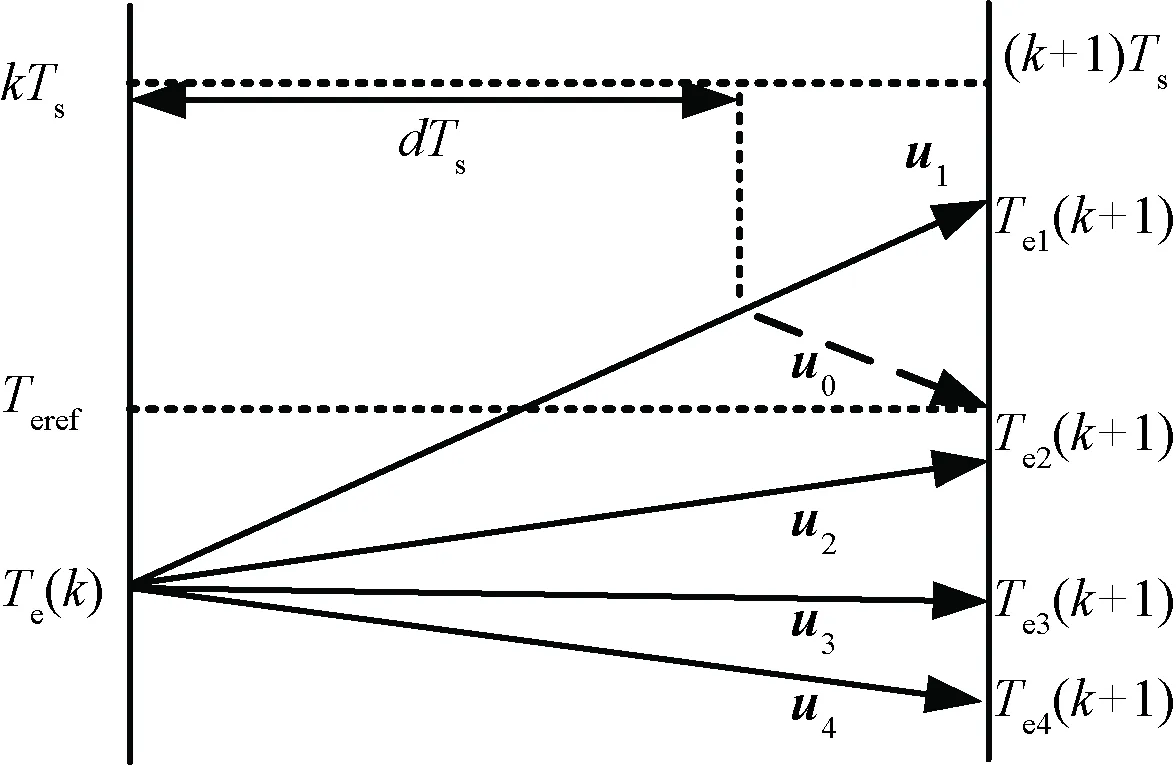
圖3 矢量選擇示意圖
由式(9)可知,零矢量作用時Te變化率sT0:
(15)
(16)
有效電壓矢量作用時Te變化率sTi:
(17)
式中:udi(k)和uqi(k)分別為第i個有效矢量ui的d,q軸分量,i=1,2,…,6。
加入占空比后的轉矩預測值:
Te(k+1)=Te(k)+sTidiTs+sT0(1-di)Ts
(18)
令Te(k+1)=Teref,可得ui的占空比:
(19)
將di代入式(11),選擇gi最小的di。
3 雙矢量無權重預測轉矩控制
由Teref=Te(k+1)及式(5)可得:
(20)
結合式(7)和式(8),設:
id(k+1)=k1+kud
(21)
iq(k+1)=k2+kuq
(22)
式中:
(23)
(24)
(25)
則將式(21)~式(24)代入到式(19)并轉換到α,β坐標系,有:
(26)
記:
(27)
由式(25)知,Teref=Te(k+1)在α,β坐標系下對應一條直線l,可以將式(13)轉換為任意矢量(uα,uβ)到l的距離dT,dT表達式:
dT=|-uαsinθ+uβcosθ-dT|
(28)
將式(20)~式(24)代入到ψsref=ψs(k+1)并轉換到α,β坐標系,有:
(29)
式中:
(30)
(31)
ψsref=ψs(k+1)在α,β坐標系下對應一個圓c,圓上任意點均滿足磁鏈無差拍,可以將式(14)轉換為任意矢量(uα,uβ)到c的距離dF,dF表達式:
(32)
由式(28)和式(32)可知,dT和dF均為同一坐標系下的距離公式,有相同的含義,故可以構建新的無權重目標函數如下:
g=dT+dF
(33)
記所本提方法為SVB-NWF-PTC,其選擇矢量的示意圖如圖4所示。
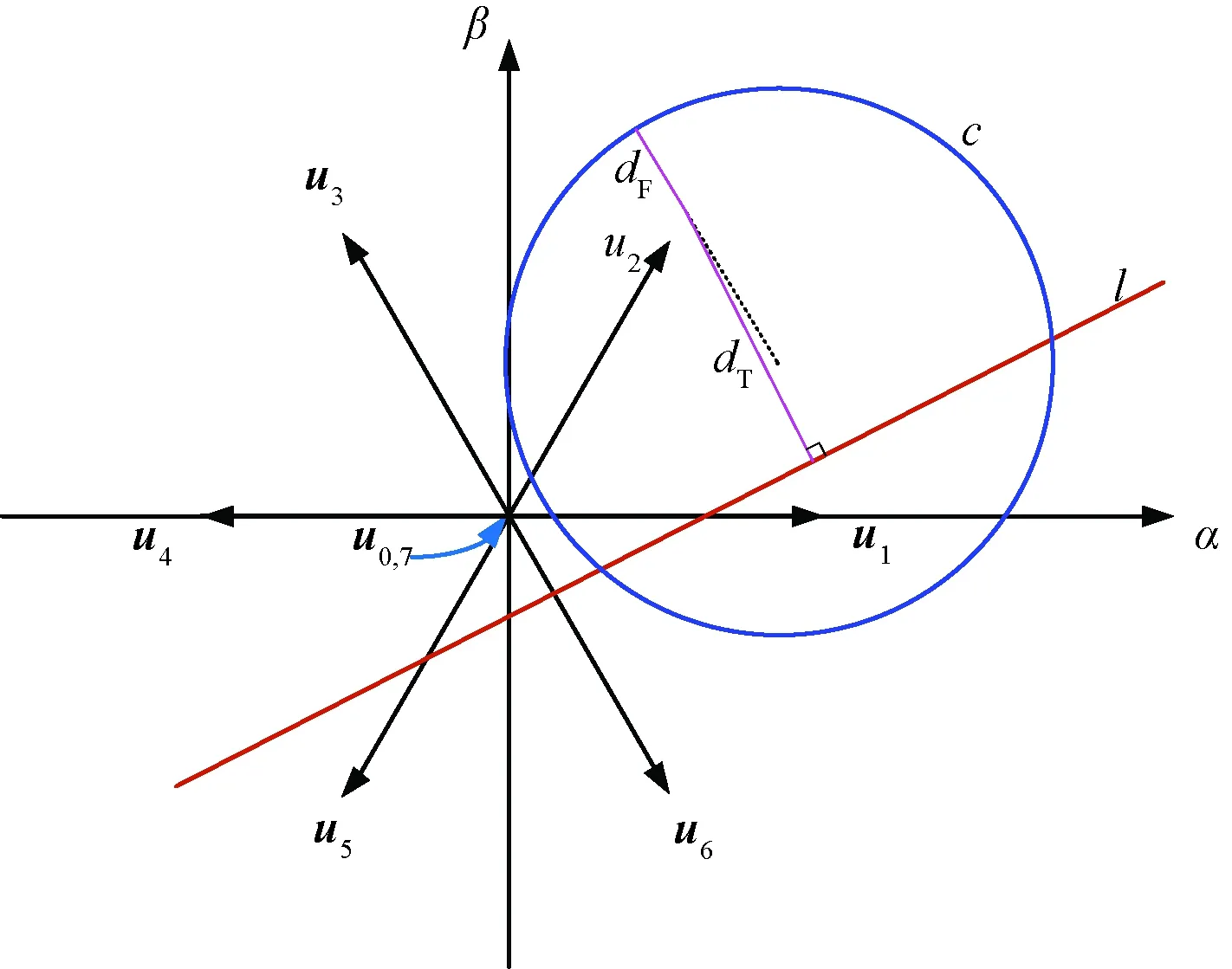
圖4 SVB-NWF-PTC矢量選擇示意圖
基于式(33)引入占空比,記為SVB-NWF-PTC,可以借助式(13)或式(28)分別求解作用時間。
(1) 基于式(13)
該方法和Duty-PTC采用的方法完全相同。求出ui占空比di后,ui和u0合成矢量為(diuαi,diuβi),將其代入式(33),尋優后得到uopt和dopt。
(2) 基于式(28)
對于矢量ui和u0,有:
dTi+dT0=di(-uαisinθ+uβicosθ)
(34)
(35)
令dT=0,di表達式如式(35)所示。若di>1,則di=1;若di<0,則di=0。然后將ui和u0合成的矢量(diuαi,diuβi)代入式(33)尋優。SVB-NWF-PTC控制框圖如圖5所示。
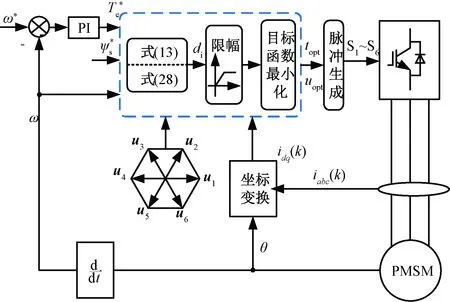
圖5 SVB-NWF-PTC控制框圖
4 仿真與實驗分析
為了驗證SVB-NWF-PTC的有效性,給出了Duty-PTC和本方法的加減轉速、加減負載和穩態仿真波形。PMSM參數如表1所示,采樣頻率設置為20 Hz。
表1 PMSM參數
在轉速1 000 r/min、轉矩8 N·m和額定轉速3 000 r/min額定負載15 N·m兩種工況下,PMSM都設置空載起動,在0.2 s時突加負載轉矩,比較Duty-PTC和SVB-NWF-PTC的A相定子電流ia和THD分析,如圖6和圖7所示。
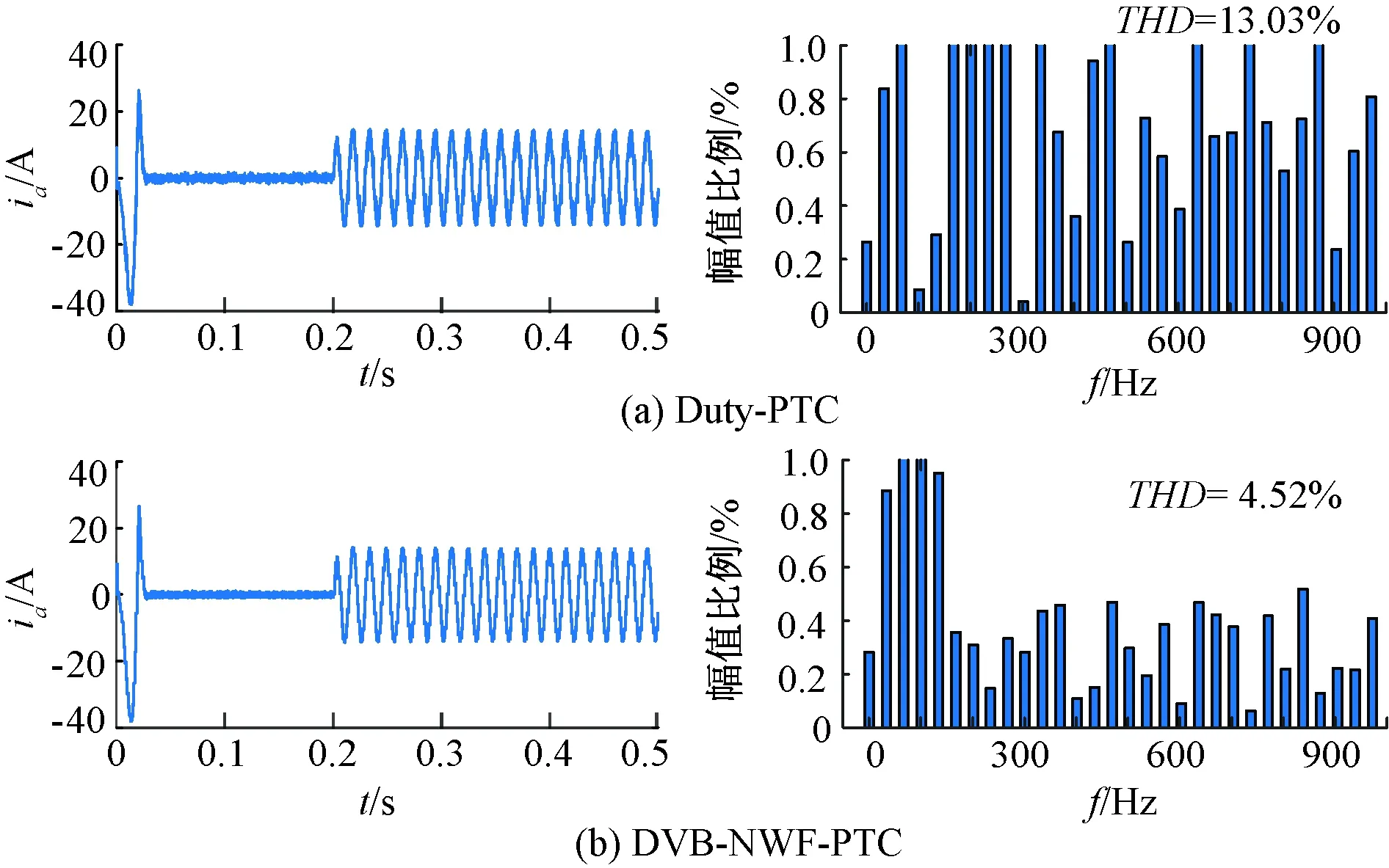
圖6 轉速1 000 r/min、轉矩8 N·m下的相電流及THD分析
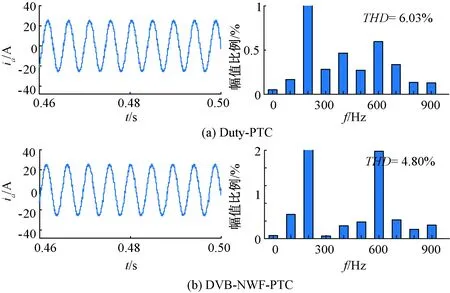
圖7 額定轉速、額定轉矩15 N·m下相電流及THD分析
由圖6和圖7可得,相較于Duty-PTC,轉速1 000 r/min和轉矩8 N·m下本方法A相電流諧波畸變率THD減小了65.31%;額定轉速、額定轉矩條件下本方法A相電流諧波畸變率THD減小了20.40%。
兩種工況下本方法和Duty-PTC的轉矩和磁鏈脈動如圖8、圖9所示。
轉矩和磁鏈脈動表達式如下:
(36)
(37)
式中:Te_ripple和ψe_ripple分別為轉矩和磁鏈脈動;N為采樣個數;Te_ref和ψe_ref分別為轉矩和磁鏈參考值。
由圖8和圖9可知,不同工況下,本方法的轉矩和磁鏈脈動都小于Duty-PTC。

圖8 轉矩8 N·m、不同轉速和額定轉速、不同轉矩條件下Duty-PTC和SVB-NWF-PTC的磁鏈脈動
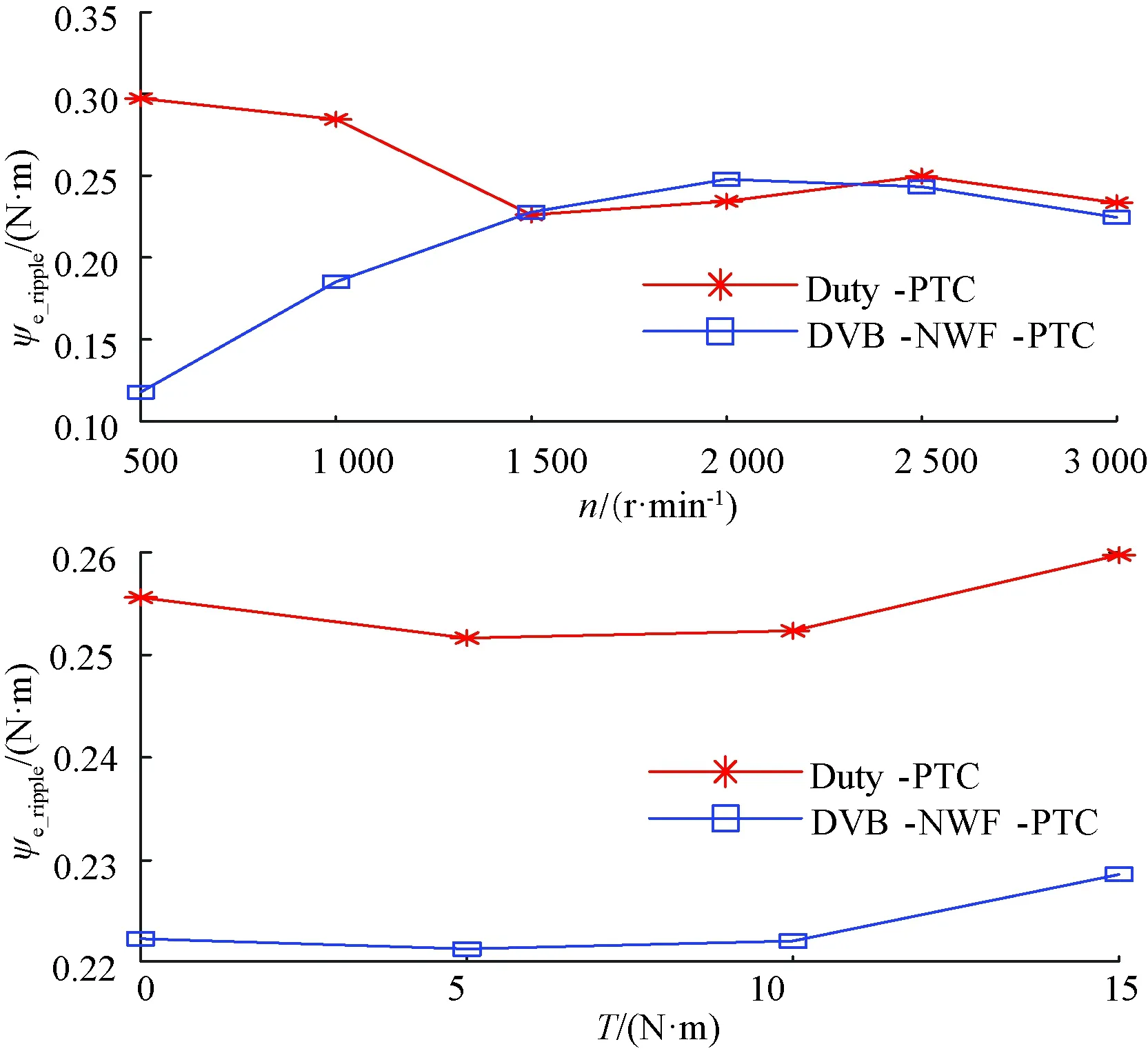
圖9 轉矩8 N·m、不同轉速和額定轉速、不同轉矩條件下Duty-PTC和SVB-NWF-PTC的轉矩脈動
PMSM加減負載設置:0.2 s時突加10 N·m負載,0.3 s時突加15 N·m負載;0.4 s時將負載突減至5 N·m。圖10和圖11分別為Duty-PTC和SVB-NWF-PTC加減負載仿真波形。PMSM空載起動,兩種方法的轉矩達到限幅值,Duty-PTC的轉矩脈動大于SVB-NWF-PTC。突加或突減負載,兩種方法均經過約50 ms加速到給定轉速2 000 r/min,動態性能基本相同。
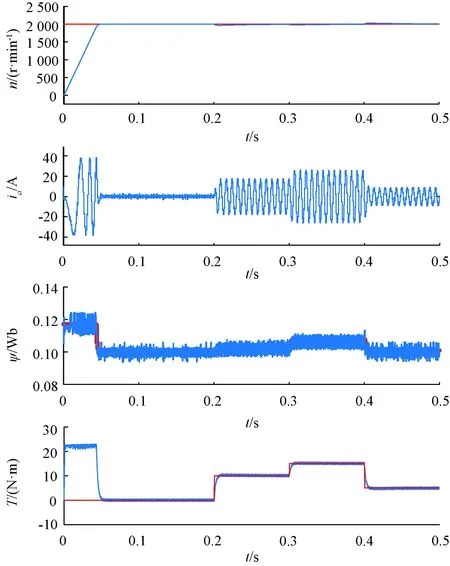
圖10 Duty-PTC加減負載仿真波形
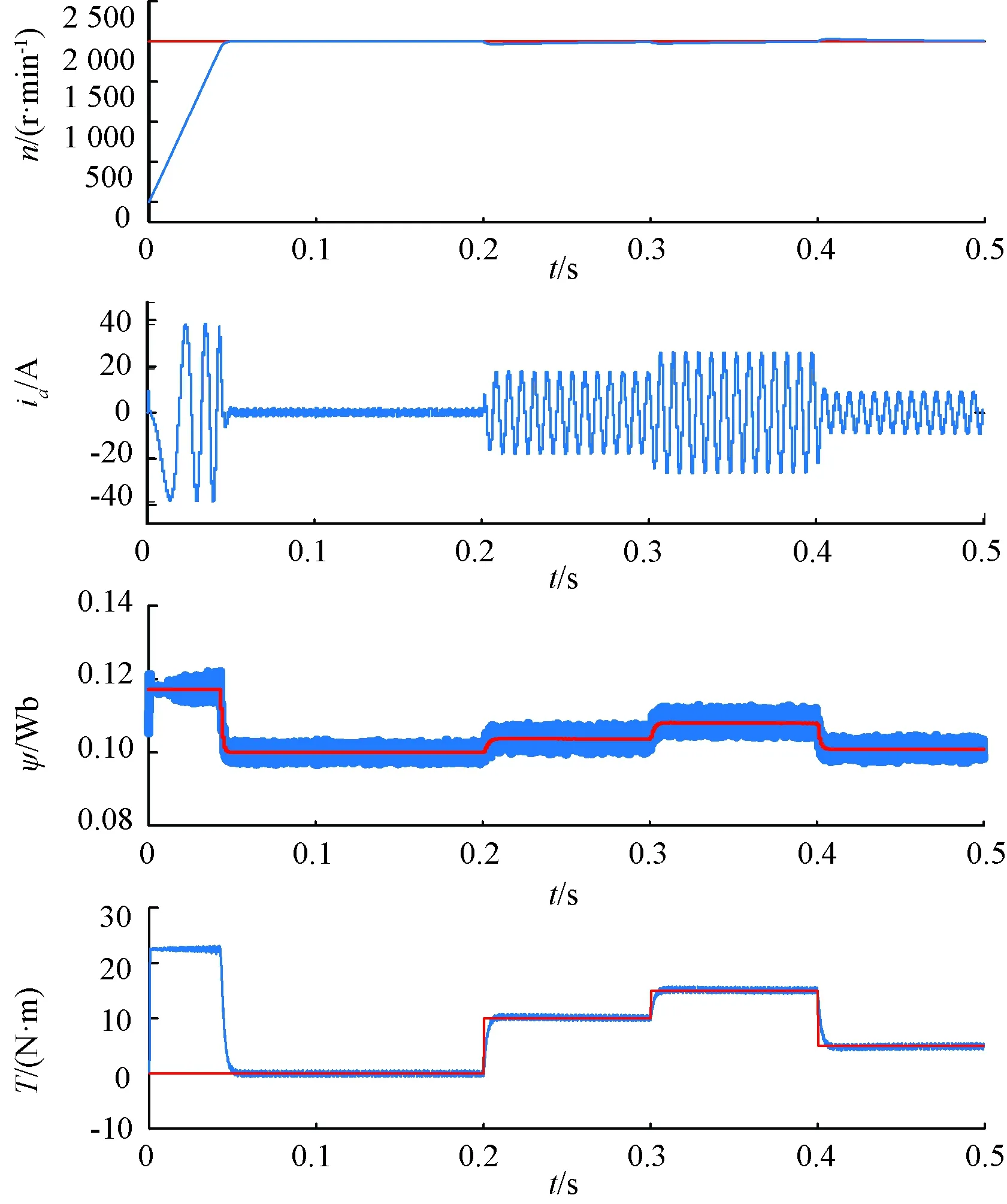
圖11 SVB-NWF-PTC加減負載仿真波形
圖12給出了轉速800 r/min,負載轉矩8 N·m工況下Duty-PTC與SVB-NWF-PTC兩種控制策略的穩態實驗波形。Duty-PTC下,電流諧波畸變率THD為13.62%,而SVB-NWF-PTC能顯著改善穩態性能,電流諧波畸變率THD僅為5.98%,其轉矩與磁鏈脈動也均小于Duty-PTC。
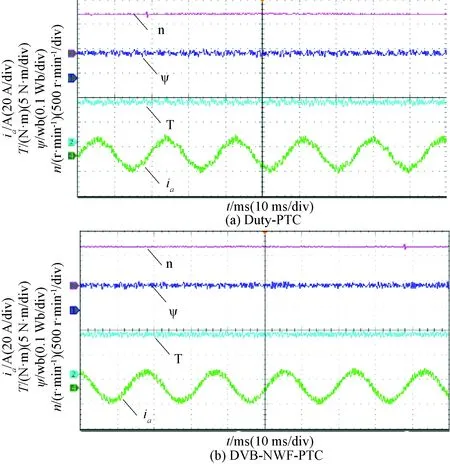
圖12 轉速800 r/min、轉矩8 N·m條件下相電流及THD分析
5 結 語
為了消除權重系數并提高穩態性能,本文提出了一種雙矢量無權重預測轉矩控制方法。仿真結果表明,與Duty-PTC相比,本方法無需權重系數,能進一步減小相電流諧波畸變率THD、轉矩脈動和磁鏈脈動,動態性能和Duty-PTC基本相同。
