大跨度鋼拱橋平轉施工多尺度有限元分析
2022-11-19 01:33:26岳建彬楊添翼稂其林
西部交通科技 2022年8期
岳建彬,彭 濤,楊添翼,稂其林
(1.廣西建設職業技術學院,廣西 南寧 530007;2.長沙理工大學,湖南 長沙 410114)
0 引言
鋼拱橋不僅具有優良的靜動力性能,而且造型優美、易與周圍環境和諧統一[1],以上海盧浦大橋、重慶朝天門大橋、廣西南寧大橋等為代表的鋼拱橋成為越來越多大城市的標志性建筑之一。大跨度鋼拱橋施工過程中的安全風險高于其成橋狀態。施工過程的精確數值模擬是保證其施工安全的重要手段,目前大跨度鋼拱橋有限元分析主要分為整體宏觀模型和微觀精細化模型兩大類。宏觀模型一般采用平面或空間桿系單元建立,在計算效率方面占據優勢,但難以精確模擬一些復雜結構和微觀行為;微觀模型一般采用空間殼、實體單元建立,理論上可以從整體結構中取出局部構件進行較為精細的微觀分析,但其邊界條件難以準確確定,而對實際復雜結構進行全局的微觀模型模擬時,工作量巨大,效率較低[2-4]。近年來,為了兼顧計算精度和計算效率,國內外研究人員提出了采用不同類型和尺度的單元來模擬具有不同特征結構部位的多尺度模型方法,其關鍵是建立能夠實現宏觀尺度模型與微觀尺度模型協同計算的連接方式。目前,國內外研究人員對多尺度模型進行了大量卓有成效的探索和實踐[5-7],為大跨度鋼拱橋施工過程的精細分析提供了有效的模擬方法。本文在現有研究成果基礎上,以廣東某主跨300 m的鋼拱橋為背景,提出了大跨度三肋鋼拱橋平轉施工多尺度有限元分析方法。
1 工程概況
背景工程某大橋為主跨300 m的帶副拱的三肋式鋼箱拱橋,橋面寬度為48.6 m,主拱肋采用拱軸系數為1.1、凈矢跨比為1/4.55的三肋式懸鏈線拱,肋間凈距為16 m,截面形式為變高度箱型截面,拱肋寬度保持1.2 m不變,高度從4.5 m變化至3.0 m;主、副拱肋合并處截面高度為7.2 m,拱頂處截面高度為4.0 m;副拱采用等截面箱型截面,截面高2.0 m,寬1.2 m。大橋吊桿及上、下立柱采用“H”形截面鋼結構,與主、副拱肋及鋼系桿同寬。
為了減小施工對橋下河流通航及防洪的影響,大橋采用豎轉加平轉的施工方法,在大橋豎轉施工完成后,平轉施工中采用副拱代替常規的臨時扣索,除了施加小噸位的配重外,不再需要附加其他臨時構件,形成由主拱、副拱、邊拱及轉盤等結構自身構件構成的平轉體系。平轉體系主要由上、下轉盤、中心轉軸、撐腳及環道等組成,通過張拉液壓同步千斤頂提供牽引力實現整體平轉,單個半拱的平轉重量約為14 800 t,平轉角度北岸為104.6°,南岸為180°。大橋總體布置如圖1所示。
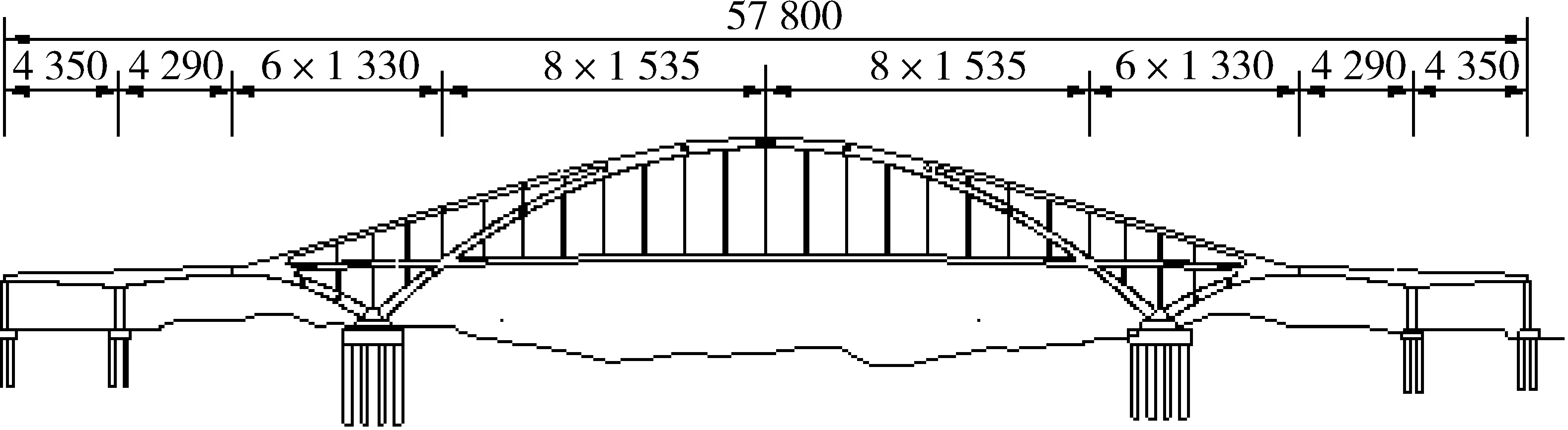
圖1 大橋總體布置示意圖(cm)
2 多尺度有限元建模方法
2.1 建模思路
現代大跨徑鋼拱橋構造一般較為復雜,例如本文的背景工程就包含主拱與副拱、主拱與剛性系桿、邊跨拱結構與副拱和系桿箱等多個構件連接節點,而傳統的桿系模型難以對這些復雜節點部位的剛度和質量進行精確模擬;鋼拱橋平轉過程中的轉盤結構普遍采用包含預應力的塊體混凝土結構,轉體過程中的巨大重量通過轉盤傳遞到中心轉軸和撐腳上,轉盤結構在轉體過程中的受力較為復雜,傳統的桿系模型難以對其進行模擬。為了對大跨度鋼拱橋平轉施工進行精細的模擬,本文提出了大跨度鋼拱橋平轉施工多尺度有限元分析方法,采用不同尺度的單元類型模擬結構的不同部位的多尺度建模策略,可以采用殼單元對復雜的構件連接節點進行精細模擬,采用實體單元對轉盤結構進行精細模擬,采用梁單元對拱肋、系桿箱、吊桿和橫撐等構件進行模擬。要使具有不同節點自由度、網格尺寸和剛度矩陣的不同類型單元構建成為一個多尺度模型并實現協同工作,最大的難點是解決不同類型單元之間的界面連接問題。土木工程結構多尺度有限元分析中,常見的主要有梁與殼單元、梁與實體單元以及殼與實體單元之間的這三種連接形式,不同連接形式的基本原理和實現方法基本類似,限于篇幅,本文以梁單元與實體單元間的連接為代表,基于變形協調原理實現不同尺度單元界面間的連接。
2.2 基于變形協調原理的界面連接
梁單元與實體單元在彎矩和軸力作用下分別發生轉角和軸向位移的節點位移協調如圖2所示。圖中:S1,S2…Sn表示實體節點,α為界面在XZ平面內的轉角,M為截面上彎矩,N為截面上軸力,A為梁單元節點。

圖2 節點位移協調示意圖
當梁單元變形時,實體單元界面上各節點的位移可由梁單元節點A得到,計算公式如下:
Δxsi=ΔxA+rsisinα
(1)
ΔZsi=ΔZA+rsi(cosα-1)
(2)
rsi=Zsi+ZA
(3)
式中,Δxsi,ΔxA——表示實體單元Si節點和梁單元A節點的X軸方向位移;
ΔZsi和ΔZA——表示實體單元Si節點和梁單元A節點的Z軸方向位移;
Zsi、ZA——表示實體單元節點和梁單元節點的Z軸坐標值。
當實體單元變形時,梁單元節點A的位移可由實體單元界面上的所有節點位移求得,計算公式如下:
(4)
(5)
(6)
3 多尺度有限元分析工程應用
3.1 多尺度有限元模型的建立
采用ANSYS軟件建立背景工程大橋的多尺度有限元模型,主拱肋、副拱、系桿箱、橫撐采用空間梁單元Beam188模擬,主拱肋、副拱、系桿箱間連接的節點采用殼單元shell63模擬,橋面縱橫梁格采用Beam188單元模擬,橋面板結構采用shell91單元模擬,混凝土拱座及上轉盤采用實體單元solid65模擬,拱座內勁性骨架和預應力筋采用三維桿單元link10模擬。平轉配重以集中質量的形式均布施加于端橫梁。不同尺度單元的連接基于上述方法,在界面上建立約束方程實現。大橋平轉施工多尺度有限元模型如圖3所示。

圖3 大橋平轉施工多尺度有限元模型圖
3.2 動力特性計算
利用建立的背景工程大橋的平轉施工多尺度有限元模型計算得到了北岸半拱結構前7階動力特性如表1所示。由于結構的動力特性對結構的剛度、質量和邊界條件較為敏感,而建立的多目標模型精細地模擬了大橋平轉前的真實狀態,利用殼單元模擬各構件相交處的復雜節點,利用實體單元模擬拱座與轉盤結構,按照真實的支撐狀態對轉盤施加了約束。
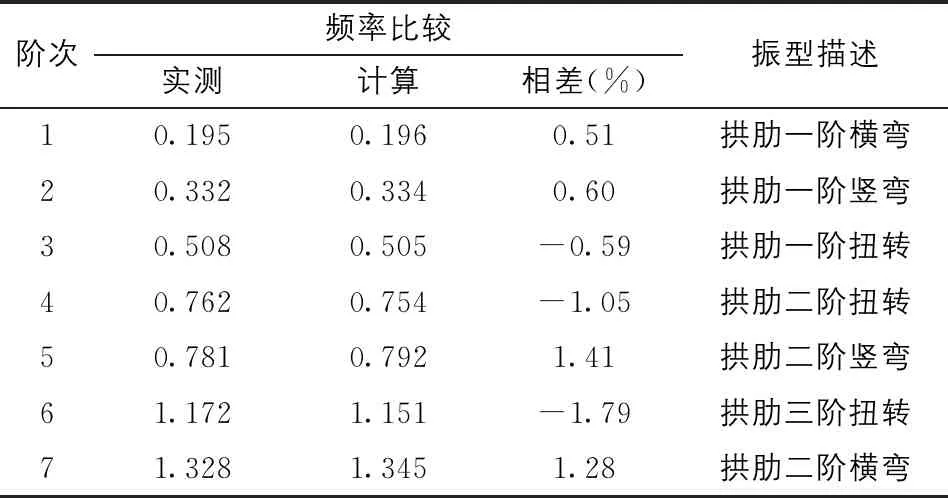
表1 北岸半拱平轉前前7階頻率實測值與計算模態參數比較表
從表1可知,北岸半拱平轉前的前7階動力特性的多尺度模型結果和實測結果較為接近,計算頻率和實測頻率相差最大為1.8%,表明多尺度模型精確地模擬了結構的剛度、質量和邊界條件。為了驗證模型計算的準確性,對大橋轉體前狀態進行了模態試驗,北岸半拱平轉前模態試驗的單個拱肋上共布置25個測點,全結構三個拱肋共布置75個測點,單個拱肋的測點布置如下頁圖4所示。
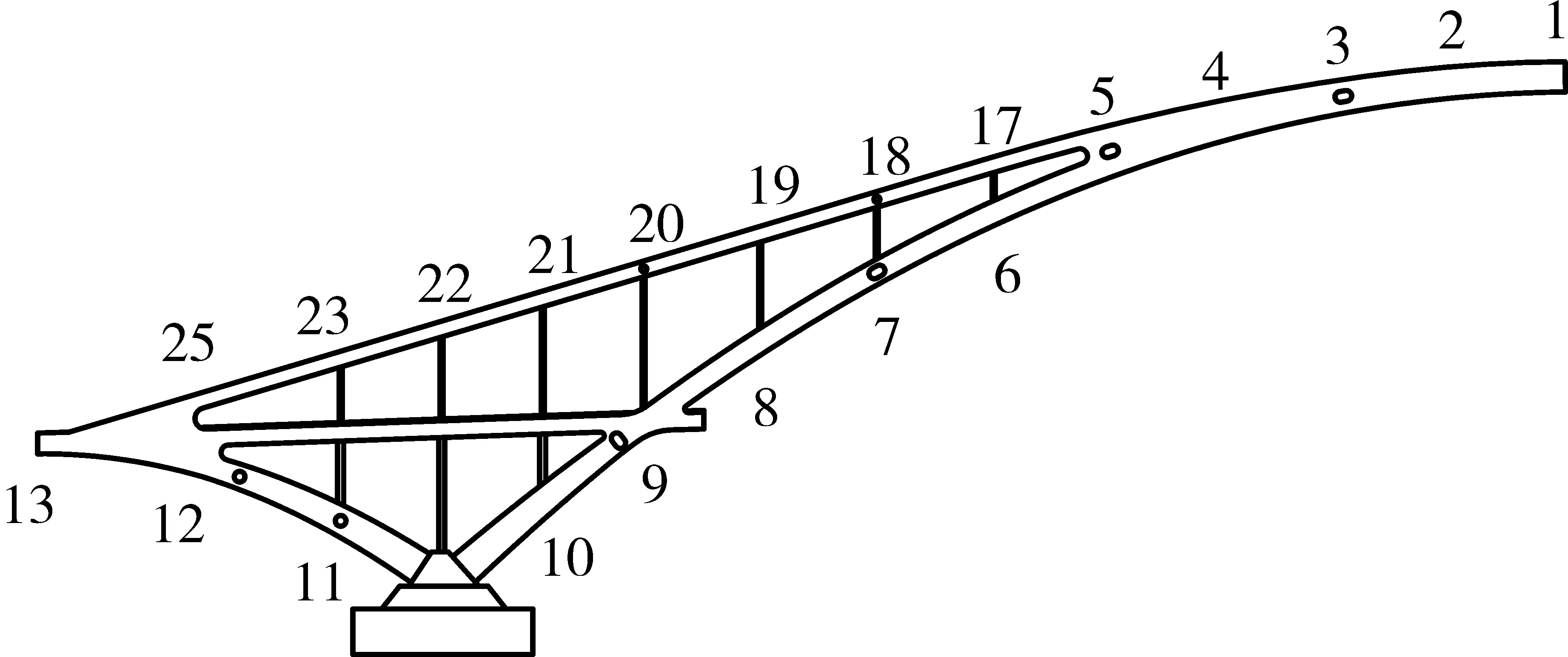
圖4 模態試驗測點布置圖
3.3 靜力計算結果
3.3.1 上部結構控制截面應力及平轉配重計算
大橋平轉前及轉體過程中,主拱及邊拱肋處于最大懸臂狀態,拱腳截面的彎矩較大,副拱連接主拱肋和邊拱肋,類似于常規平轉中的“扣索”作用,使得整個半拱結構能夠達到平衡狀態,副拱承擔較大的拉力作用,有必要對處于最大懸臂狀態中的上部結構進行精細的應力分析,保證轉體過程中上部結構的安全。利用多尺度模型計算得到平轉前最大懸臂狀態下的上部結構各控制截面應力與施工控制得到的實測數據對比情況如表2所示。由表2可知,主拱拱腳頂面受拉、底面受壓,承受負彎矩,最大應力計算值為213.3 MPa;邊拱拱腳頂面受壓、底面受拉,承受正彎矩,最大應力計算值為-198.7 MPa;副拱L/2截面上的最大拉應力計算值為243.3 MPa。各控制截面應力計算值與實測值的最大偏差為6%,計算與實測較為吻合,實測值都略小于計算值,且均小于Q345c材料的容許應力值,表明平轉施工過程中結構受力處于安全狀態。
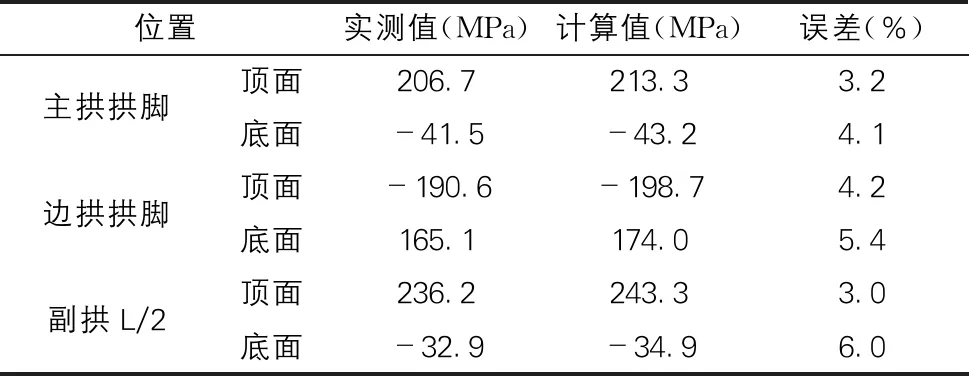
表2 北岸半拱平轉前各控制截面應力表
另一方面,雖然有了副拱的連接作用,使得半拱結構基本處于平衡狀態,但由于主拱的懸臂長度大于邊拱,因此還需要在邊拱最外側的端橫梁上設置一定的配重,保證轉體結構的中心位于轉盤的中心偏邊拱一側。由于轉盤結構構造復雜,常規的有限元分析難以精確地模擬所有的結構質量和剛度,難以精確地計算結構的重心位置和配重重量,而本文建立的多尺度有限元模型中嚴格按照轉盤的實際構造建立了精細模型,參與轉體的所有結構和重量都已包含在模型中,應用ANSYS的查詢命令得到各單元的自重后,按式(7)計算就可以得到結構的重心坐標:
(7)
式中,xi,yi,zi——表示各單元的重心坐標值;
xc、yc、zc——表示整個結構的重心坐標值;
Pi——各單元重量。
計算得到北岸結構配重為80 t時轉體結構的重心位于轉盤中心,施工時實際配重設為90 t。
3.3.2 轉盤結構應力分析及平轉牽引力計算
平轉過程中,巨大的結構轉體重量由上轉盤的中心轉軸和撐腳支撐,進而傳遞到下轉盤。上轉盤拱座之間的混凝土橫梁、中心轉軸和撐腳的局部應力較大且受力較為復雜,其安全性關系到平轉施工的成敗。由于上轉盤是構造復雜的塊體結構,拱座之間的混凝土橫梁承受較大的彎矩和剪力,為了改善橫梁受力,在橫梁內部布置了大量的預應力筋,采用多尺度有限元模型能夠模擬轉盤在轉體過程中的真實受力,得到轉盤結構的精確計算結果。計算得到北岸上轉盤結構的主拉應力云圖和主壓應力云圖分別如圖5和圖6所示。
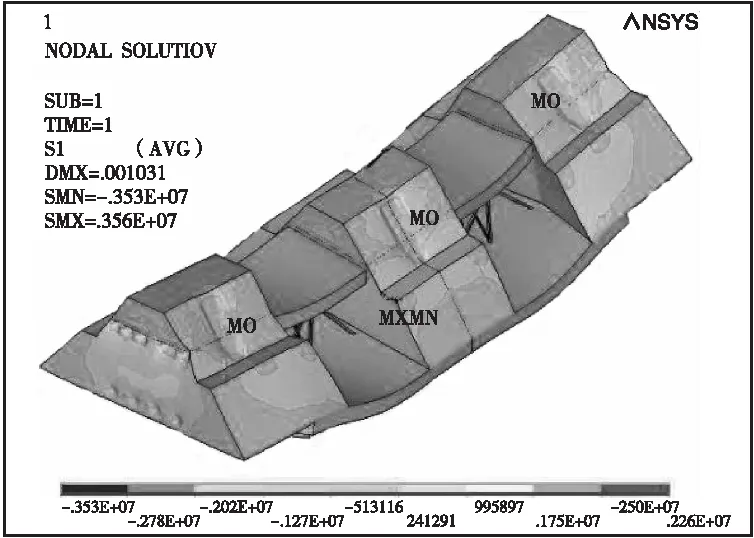
圖5 北岸上轉盤主拉應力云圖(Pa)
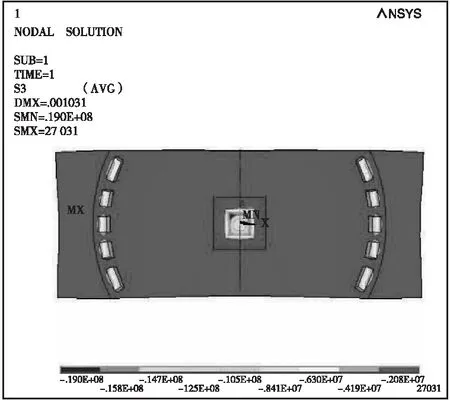
圖6 北岸上轉盤主壓應力云圖(Pa)
通過多尺度模型計算得到,拱座之間的混凝土橫梁在恒載和預應力的作用下,除預應力筋的錨固處外基本處于受壓狀態;上轉盤混凝土的最大豎向壓應力位于中心轉軸,最大值為15.3 MPa,撐腳混凝土的豎向壓應力為4~12 MPa;中心轉軸和撐腳分別承擔的轉體重量為5 535 t和9 265 t,分別為總重的37.4%和62.6%。多尺度分析表明,平轉過程中上轉盤各構件的受力都處于安全狀態。
由于上轉盤為構造復雜的塊體結構,且撐腳、中心轉軸和下轉盤間的接觸狀態較為復雜,采用解析法和常規的有限元模型難以精確計算出平轉牽引力。平轉開始啟動的臨界條件是牽引力矩等于阻力矩,阻力矩由上、下轉盤間的摩擦力產生。平轉啟動瞬間對應的牽引力稱為臨界牽引力,對應的力矩稱為臨界力矩,其值等于上、下轉盤間最大靜摩擦力所產生的阻力矩。利用多尺度有限元分析結果,本文提出了臨界牽引力T0的計算公式如下:
(8)
式中,n——上轉盤中心轉軸和撐腳底部產生摩擦力的單元數量;
Ai——某個產生摩擦力單元的面積;
σi——其接觸面上的法向應力;
ri——其面積的形心與轉動中心之間距離;
D——牽引力力臂;
μ——接觸面間的靜摩擦系數。
根據同類工程的統計資料,此類轉體的靜摩擦系數μ值通常位于0.06~0.08,無實測數據時取其均值0.07。
通過多尺度有限元分析,可以提取得到上轉盤中心轉軸和撐腳底部接觸面上的精細應力分布,計算得到北岸平轉臨界牽引力為656 t,實測值為640 t,二者誤差為2.5%,可見該方法可精確地計算平轉牽引力。
4 結語
(1)基于變形協調原理提出了大跨度鋼拱橋平轉施工多尺度有限元分析方法,實現了不同尺度模型之間的變形協調,并基于有限元軟件ANSYS進行了實際工程應用,結果表明此方法可有效實現不同尺度模型之間的變形協調,計算結果精確、可靠。
(2)利用多尺度模型計算得到了背景工程北岸半拱平轉前的前7階動力特性,與實測結果較為接近,計算頻率和實測頻率最大誤差為1.8%,表明多尺度模型精確地模擬了結構的剛度、質量和邊界條件。
(3)利用多尺度模型計算并復核了轉體結構的局部應力,確保了結構的安全;基于多尺度有限元分析,提出了平轉結構的重心坐標和牽引力計算方法,解決了平轉施工中傳統方法難以計算的難題,為大跨度鋼拱橋平轉施工的安全高效實施提供了技術支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
