推拿手法數據手套及數據采集系統的研發
2022-11-21 08:06:14謝俊成陳潔徐剛李少雄劉堂義
按摩與康復醫學 2022年23期
關鍵詞:研究
謝俊成,陳潔,徐剛,李少雄,劉堂義△
(1.上海中醫藥大學,上海 201203;2.長沙市第八醫院,湖南 長沙 410199)
推拿又稱“按摩”、“導引”、“按蹺”等,有著悠久的歷史。《素問·異法方宜論篇》中明確記載:“中央者,其地平以濕,天地所以生萬物也眾,其民食雜而不勞,故其病多痿厥寒熱,其治宜導引按蹺,故導引按蹺者,亦從中央出也。”提示推拿可以治療痿痹、厥逆、傷熱等疾病。推拿產生療效的關鍵在于手法,推拿手法量化問題是解決目前推拿諸多問題的關鍵點,是促進手法操作從經驗化到客觀化、規范化轉變的關鍵[1]。
有學者認為目前研制成功的手法測定儀僅能在儀器上進行手法操作并檢測,但在人體身上操作時并不能加以檢驗,忽略了臨床因素,因此促進手法的量化需要進行大量的基礎研究[2],量化推拿手法的相關參數傳統的測量儀器[3-4]多為離體試驗、單式手法測定試驗,如使用TDL-Ⅰ型手法動態力測定器、FZ-Ⅰ型推拿手法測力分析儀等測力平臺,操作者在測力平臺上進行手法操作,通過測力平臺得出手法的相關參數,容易忽略真實操作環境中對人體進行手法操作時,受試者的主觀反饋、環境影響等因素,增大了數據誤差。為解決既往研究手段的不足,本研究擬研發一款可實時在體測定推拿手法參數的手套式測定儀器,并對其數據采集功能、數據分析功能、手套性能進行一系列測定和評估,為推拿手法參數量化提供一種新的研究手段。
1 推拿手法數據手套及數據采集系統的研發流程
推拿手法數據手套的關鍵設備與技術支持是多點式柔性薄膜壓力傳感器和ELVIS技術,主要由信息采集模塊和數據分析模塊兩個部分構成(如圖1)。基于多點式柔性薄膜壓力傳感器和ELVIS技術的“推拿手法數據手套”主要用于在PC端實時顯示操作手的手法物理學參數和保存數據以供日后量化研究,協助推拿操作者進行教學和臨床考核。信息采集模塊由彈性手套、柔性薄膜壓力傳感器和電阻轉換模塊組成,操作手可以通過穿戴配置有傳感器的手套直接在人體各個部位操作,轉換模塊則通過與傳感器連接,將電阻信號轉換為模擬輸出信號(A0)信號并傳送到信息采集系統。信息采集系統包括硬件和軟件兩部分,硬件部分負責接收A0信號并轉換成電壓信號,然后經過電腦PC端傳送到軟件端,接收信號處理與分析,最終在PC界面實時顯示以及后臺存儲數據。
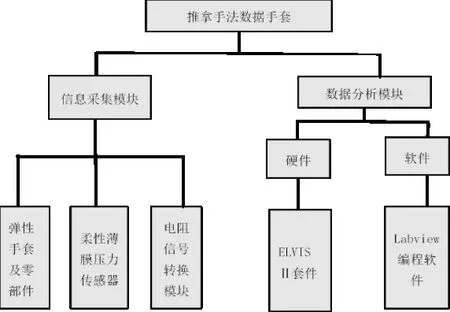
圖1 “推拿手法數據手套及數據采集系統”系統框圖
2 推拿手法數據手套
2.1 主要材料 彈性手套、I-motion IMS-C10A型電阻式薄膜壓電傳感器、43x17x18.5mm電阻轉換模塊、WT-500系列電子數顯彈簧拉壓試驗機。
2.2 制作方法 參考既往文獻[5-8]運用WT-500系列電子數顯彈簧拉壓試驗機對傳感器進行定標,同時讀取力值和電壓值,運用SPSS21.0統計軟件得出x值(電壓)和y值(力值)的回歸方程:y=-7.68x+38.5,以便在軟件用戶操作界面直接讀取到實時力值。完成定標后,將7枚傳感器分別放置于小魚際側面、小魚際背側和大拇指指腹處(1和4、2和5、3和6一一對應),并通過用熱縮套管進行塑封及固定的杜邦線與電阻轉換模塊相連接,制成“推拿手法數據手套”。數據手套通過ELVISⅡ套件與Labview2017連接,構成“推拿手法數據手套及數據信息采集系統”。結構如圖2、圖3所示。

圖2 推拿手法數據手套

圖3 推拿手法數據手套及采集系統實物圖
3 推拿手法數據分析模塊
3.1 硬件部分 本課題硬件系統采用美國國家儀器公司(NI)研發的ELVISⅡ型模板,主要利用ELVISⅡ的AI接口接收與IMS-C10A型傳感器配套電阻轉換模塊輸出的AO信號,并將AO信號轉換成計算機可識別的模擬信號,ELVISⅡ的模GROUND接口與電阻轉換模塊的外接GND接口連接,ELVISⅡ的±5V接口與電阻轉換模塊VCC電源接口相連接,EL‐VISⅡ的USB接口與PC端的USB接口連接,將轉換的模擬信號傳輸到Labview軟件,具體連接示意圖如圖4。“推拿數據手套”有7枚傳感器,每個傳感器感測的信號都與電阻轉換模塊連接,引入線0-6分別接入通道ai0-ai6,如圖5所示。

圖4 ELVISⅡ電路板、轉換模塊、PC連接圖

圖5 推拿手法數據手套采集裝置
3.2 軟件開發 本研究使用的編程軟件為美國NI儀器公司開發的一款可視化編程軟件——Labview 2017。本系統軟件分為基礎設置程序、數據接收程序、數據分析程序三個部分。基礎設置程序包括通路設置、定時設置和記錄設置,單點式柔性薄膜壓電傳感器感觸的電阻信息經過電阻轉換模塊轉換為AO信號傳送到ELVISⅡ程序板上后,基礎設置程序負責配置ELVISⅡ的采樣模式、需要接收的傳感器通道、采樣率和數據的存儲。采樣模式為連續采樣。數據接收程序將推拿手法數據手套傳輸給ELVISⅡ的模擬信號,實時轉換為電壓信息并在軟件用戶界面顯示。數據分析程序則負責將電壓信息通過函數等代碼換算為力值、頻率、幅值等物理學參數。
4 “推拿手法數據手套及數據采集系統”性能檢測
4.1 舒適度測試
4.1.1 研究目的 通過試驗測試系統操作的舒適度。
4.1.2 試驗對象 上海中醫藥大學及附屬醫院針灸推拿專業學生和老師各20名、共40名。
4.1.3 測試方法 準備好不受干擾的測試房間,提前預約受試者參加測試,采用單盲法,所有受試者測試時間隔開,互不溝通,告知所有受試者測試目的是想了解佩戴手套進行推拿操作是否舒適。測試前受試者在測試房間安靜休息兩分鐘,排除外界因素干擾,受試者帶上手套后在志愿者身上進行?法和揉法操作各5分鐘,操作結束后收集受試者對手套的感受,并囑咐志愿者隔2-3天由其他操作者進行手法操作。
4.1.4 測試結果 推拿手法數據手套的主觀舒適度分為舒適、較舒適、和不舒適三種,結果如下圖6所示:20名教師中,13人佩戴推拿手法數據手套進行手法操作感覺舒適,6人覺得較舒適,1人覺得不舒適。20名學生中,15人感覺佩戴手套操作感覺舒適,5人覺得較舒適。總體來說,97.5%的人佩戴該手套感覺舒適度較好,不會影響推拿手法操作。

圖6 老師和學生舒適度調查
4.2 數據采集的穩定性研究
4.2.1 研究目的 通過試驗研究系統數據采集的穩定性。
4.2.2 試驗對象 本課題的研究對象為從事臨床工作10年以上的專業醫師1名、無明顯推拿手法禁忌癥的健康志愿者1名。
4.2.3 測試方法 測試前連接好手套和數據采集軟件,打開ELVISⅡ總電源開關和原型板開關,軟件端設置采樣率1000Hz。提前1天通知推拿醫師不要進行劇烈運動。測試時推拿醫師戴好推拿手法數據手套,為避免心理因素干擾,推拿醫師安靜休息5min后開始在志愿者身上手法操作,按照高等教材《推拿手法學》[9]中丁式?法的操作要求進行操作。手法采集系統實時采集、記錄并保存手法過程中術者第小魚際附近6個傳感器與受試者皮膚之間壓力變化的時間-力曲線。操作者每次連續操作3min,連續采集5次,每次采集時間間隔為3 min。選取醫師丁式?法操作較穩定階段的500個力值數據,使用SPSS 21.0統計軟件,對操作手法力值的平均值、峰值、谷值進行量化分析,數據采用均數±標準差(±s)表示。
4.2.4 測試結果
①時間-力值曲線圖:圖7為隨機選取的5次?法操作時6個通道的力值曲線圖,從曲線圖可以看出來,每條通路的力值大小不同,通路ai1、3、4、6手法變化有規律,波峰、谷峰相對較穩定。通路ai2和ai5力值偶有增高,考慮可能是操作者手法瞬間加力習慣的影響所致。剔除掉通路2和5,就5次操作的力值曲線圖的整個走勢而言,丁式?法的最大值、最小值以及平均力值一直維持在一定水平,三種力量的變化都較平穩,說明該手套獲取的數據具有可重復性(注意:通道ai2和ai5的數據出現漂移,但是每次數據重復性好,漂移問題在后文將提出解決方案)。

圖7 力值曲線圖
②推拿手法量化指標:由表1、圖8的數據可以得知,剔除掉通路2和5,丁式?法通道ai1、3、4和6的平均作用力分別為(0.593±0.034)kg、(0.567±0.02)kg、(0.577±0.023)kg、(0.606±0.002)kg。最大作用力分別為(0.6±0.035)kg、(0.579±0.045)kg、(0.594±0.062)kg、(0.619±0.03)kg。最小作用力分別 為(0.586±0.003)kg、(0.56±0.019)kg、(0.57±0.024)kg、(0.599±0.03)kg。丁式?法操作時,測得的各通道五次操作的最大力、最小力和平均力值基本穩定,離散度小,說明推拿手法數據手套及數據采集系統具有可重復性。
表1 滾法各通路力值參數(±s,kg)

表1 滾法各通路力值參數(±s,kg)
平均值最大值最小值例數5 5 5 Ai1 0.593±0.034 0.6±0.035 0.586±0.003 Ai3 0.567±0.02 0.579±0.045 0.56±0.019 Ai4 0.577±0.023 0.594±0.062 0.57±0.024 Ai6 0.606±0.002 0.619±0.03 0.599±0.03

圖8 丁氏?法力值參數(kg)
4.3 “推拿手法數據手套”的矯正與調試
4.3.1 矯正目的 調試通路ai2和ai5力值傳感器,減小飄移誤差。
4.3.2 矯正方法 重新調整傳感器位置,加大傳感器之間的位移。
4.3.3 矯正結果 按照章節3.2中的方法重新測量三次,結果如圖9,丁式?法6個通路的最大值、最小值以及平均力值一直維持在一定水平,三種力量的變化都較平穩,說明經矯正后該手套獲取的數據更穩定。

圖9 ?法力值軌跡圖
5 討論
推拿是中醫外治法之一,基于經絡原理,以手法在人體體表進行規范性操作,以求達到防治疾病的目的[10]。從上世紀80年代,王國才[8]基于力學原理將推拿作用于人體的力按照X.Y.Z三個方向分解并加以測定,選用垂直力感受器、橫向水平力感受器、縱向水平力感受器等組成測力器。李義凱、畢勝[13-14]等人采用ABAQUS6.1有限元軟件建立腰椎L4-L5有限元模型,但此模型只包括椎體、終板、小關節和韌帶,并沒有將相關神經、皮膚、血管等包括在內,忽視了推拿是基于經絡原理通過手法產生治療作用,部分手法可通過一定的頻率和施力范圍產生向人體內部滲透的“熱”[11-12]。陳守吉、許世雄等[15]將三個剛體O1O2(上臂)、O2O3(小臂)、O3O4(手掌)通過鉸鏈連接,模擬手臂進行手法操作,以此描述手法操作中的運動學量,但因其在操作過程中始終成握拳狀,且小指關節始終與接觸部位固定不變,手法操作過于機械化,只能為推拿手法的量化研究提供一個研究思路。在之后,張延海[16]建立6自由度剛體胸-腰椎生物力學模型,運用MAT‐LAB/Simulink進行仿真,認為振蕩激勵腰椎推拿斜扳法比脈沖激勵腰椎推拿斜扳法更安全,研究結果為醫生提供一個比較合理的振蕩激勵腰椎推拿斜扳法操作參數的范圍。嚴曉慧[17-18]應用推拿手法測試系統、三維運動解析系統以及用C#和MATLAB開發的配套數據軟件對手法動力學三維力的大小、頻率、周期進行研究,對既往文獻研究參數數值進一步具體化,但脫離人體操作,使用視頻技術難免會受環境影響,且只是通過機器采樣,不能模擬真實的臨床環境,從而導致部分數據存在誤差。方磊[19]通過使用表面肌電圖(sEMG)測定MF、IEMG、CR,了解施術者上肢的肌電信號,得出結論認為在手法操作過程中存在核心肌群,上肢核心肌群的運動存在規律,為手法達到“持久”的要求提供量化手段,但表面肌電圖(sEMG)在推拿領域的樣本量小、研究時間較短,技術尚不成熟[20]。張廣明[25]使用MFF壓力測試系統對一指禪推法的輕、中、重三個壓力度進行研究,為一指禪推法的動力學參數和相應的壓力曲線提供相關數據。通過對既往研究可以發現,不同醫家在對推拿手法參數研究中運用不同的手段進行研究,如建立數學模型[21-22]、運用表面肌電圖[23-24]、采用傳統測定儀等,為現代化研究手段提供不同研究思路,完善了推拿手法參數數據,但同時也存在不足,如易受環境因素影響、離體試驗、僅能對單式手法進行研究、不同手段研究的參數和手法單一、多從動力學和運動學角度進行研究等。
本研究研發的“推拿手法數據手套及數據采集系統”由信息采集模塊和數據分析模塊共同構成。具備以下功能及特點:①多點數據采集。以搭載經過定標后的多枚傳感器為主的體表部信息采集模塊,在穿戴手套后可直接操作手法作用于體表部,并對手法操作時多個接觸部位的力值、頻率、周期等相關參數進行實時采集,對手法操作的更多技術細節描述更加詳實,克服了傳統測定儀器對手法操作細節的忽視,同時避免了環境因素導致數據誤差。②基于真實環境的推拿手法數據采集,體驗感強。因自制手套體積小、便于攜帶,因此可實時在體采集數據,避免了離體試驗對于受試者主觀感受的忽視,使獲取的數據更加符合真實的臨床環境。③應用于推拿手法操作的學習和評價。同步、動態顯示操作手在操作過程不同部位的參數變化曲線,直觀反應推拿手法的操作過程,通過本系統采集的手法操作軌跡、頻率、周期等參數對學生手法進行矯正,并可以用于推拿手法操作的考核,避免主觀考核帶來的誤差。
基于實用性與適用性的考慮,本課題對自制手套進行舒適度及穩定性測試,在對佩戴手套操作者中感覺舒適的人占97.5%,同時對同一操作者丁氏?法不同通路的最大值、最小值、平均值進行初步測定,結果顯示波形穩定,數據重復性好,總體可以認為“推拿手法數據手套及數據采集系統”具有較高的實用性和適用性。由于本項研究初步研制成功,尚處于基礎階段,在后續優化中,可考慮優化算法模型,豐富采集的參數類型,如?法進行前擺和回擺時的皮溫差、3D運動軌跡、手法運力方向等;增加傳感器數量,便于獲取其它手法參數,擴大手法樣本量,基于臨床考慮,發掘在臨床治療某類疾病的最優手法組合;優化手套固定材料,兼顧實用與美觀。
總之,目前基于多點式柔性薄膜壓力傳感器和ELVIS技術的“推拿手法數據手套及數據采集系統”初步研制成功,主要用于在PC端,實時采集、同步顯示操作手的手法物理學參數和保存數據,以供日后量化研究,同時可以用于推拿操作的教學和教學效果評估。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19