低壓塑殼斷路器操作機構計算機仿真及優化設計
2022-11-22 06:16:08王少民李志雄陸佳琳蘇杭方舒何濤
農村電氣化 2022年11期
王少民,李志雄,陸佳琳,蘇杭,方舒,何濤
(1.云松電力技術有限公司,浙江 溫州 325604;2.俊郎電氣有限公司,浙江 溫州 325604;3.中國農業大學信息與電氣工程學院,北京 海淀 100083;4.溫州職業技術學院,浙江 溫州 325000)
塑殼斷路器是低壓配電網最常用的保護電器之一[1],其性能直接關系到下游側供電回路中電氣設備的運行安全。操作機構[2]是塑殼斷路器的最核心部件,負責斷路器的合閘、分閘、自由脫扣及復位等功能。
低壓斷路器操作機構的傳統設計方法復雜而煩瑣,通常需要4個方面的工作和流程才能完成。首先,需要計算和建立斷路器操作機構各桿件的力學參數、尺寸、相互位置等技術數據。其次,需要圖解法作出每個時刻各機構的空間運動軌跡及位置。再次,須要進行產品設計和制作樣機。最后,須要通過樣機實驗來驗證設計方案的正確性。這個過程往往須要反復進行、多次優化修正,這給斷路器操作機構設計帶來諸多不便。
將計算機輔助設計(CAD)[3]應用于低壓塑殼斷路器操作機構的設計與優化,對于提升我國低壓控制電器的自主設計和數字仿真水平具有非常重要的意義和作用:(1)通過取代人工,可以大大縮短設計周期和提高設計效率;(2)通過虛擬可視化操作,可以隨時調整產品參數和改善產品性能;(3)通過Pro/E軟件[4]的三維建模和動態過程仿真,可以取代常規的樣機制作和物理實驗驗證,并節省大量人力、物力和財力。
本文首先分析塑殼斷路器操作機構的工作原理,然后介紹塑殼斷路器的性能參數設計方法。在此基礎上,重點介紹塑殼斷路器的三維建模過程及仿真結果,主要包括斷路器零部件繪制、關鍵部件應力分析、斷路器裝配和分解、操作機構動作過程仿真。
1 塑殼斷路器操作機構的工作原理
塑殼斷路器操作機構由動觸頭支架e、下連桿f、上連桿g、跳扣j、鎖扣m等部分組成。動觸頭可繞支點O2轉動,跳扣可繞支點A轉動,手柄可繞支點O1轉動。塑殼斷路器操作機構的運動,可以分為分閘、合閘、自由脫扣和再扣4個動作。下面將具體介紹4個動作過程的工作原理。
1.1 分閘、合閘動作
分閘和合閘動作[5]過程如圖1所示。鎖扣m鎖定,使跳扣j固定不動,手柄i在外力作用下繞支點O1逆時針轉動,當彈簧h越過支點B點時,通過彈簧拉力使連桿g、f脫離死區,牽動觸頭分開,完成分閘動作。
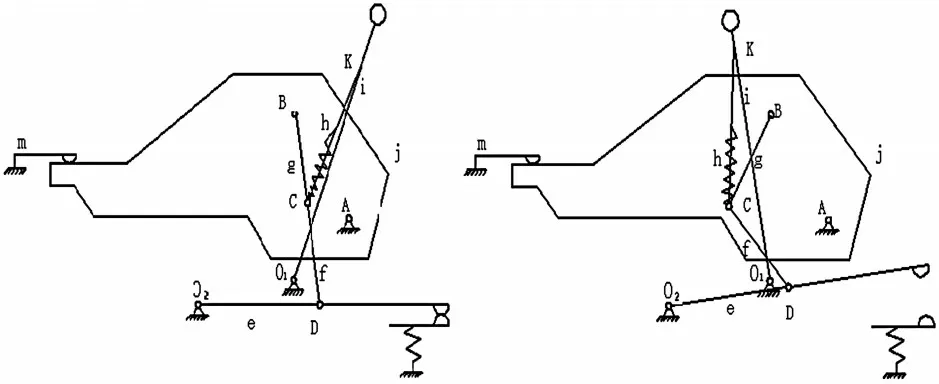
圖1 分閘、合閘狀態示意圖
當手柄反方向運動,并使彈簧越過B支點時,通過彈簧拉力拉動連桿g、f運動,并牽引動觸頭運動,使動觸頭和靜觸頭接觸,完成合閘動作。
1.2 自由脫扣動作
自由脫扣動作[6]是操作機構最為復雜的一個運動過程,可以抽象為一個四桿機構變成一個五桿機構的過程。在電路過載或短路等情況下,自由脫扣機m脫扣。如圖2所示,m脫扣瞬間,整個系統受彈簧h的拉力、觸頭斥力和重力的作用。跳扣j與手柄i在彈簧h的拉力下分別沿順、逆時針轉動,此時C點受跳扣j限制(C點與跳扣j存在限位關系)使A、B、C三個點相對靜止,此時桿g與桿AB(跳扣j上兩點)可看作一個整體,即整個機構為e、f、AB、AO2的四桿機構。其驅動力為彈簧h的拉力。
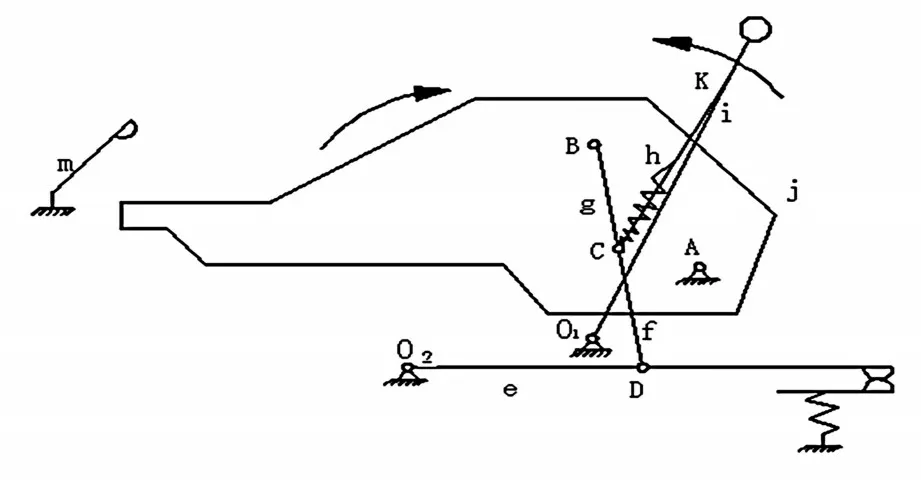
圖2 脫扣瞬間運動簡圖
如圖3所示,當跳扣j與手柄i運動到一定位置,即彈簧h越過B點。彈簧h的拉力使桿g脫離鎖扣j的限位,桿g相對于鎖扣j順時針運動,此時A、B、C三點不再相對靜止,系統又四桿機構轉變為由e、f、AB、AO2組成的五桿機構。
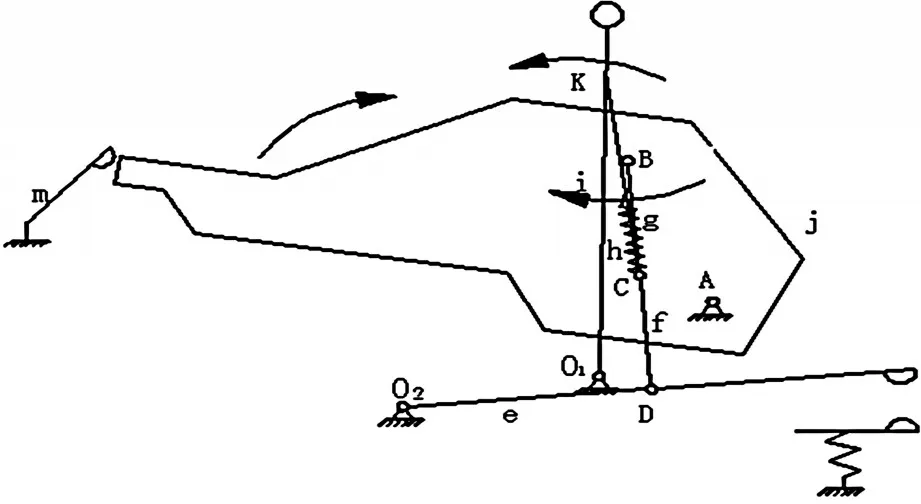
圖3 四桿-五桿機構臨界狀態簡圖
如圖4所示,當達到四桿、五桿臨界狀態后,機構在彈簧h的拉力下繼續運動,從而實現分斷狀態。在由e、f、AB、AO2組成的五桿機構中存在兩個自由度,而整個系統只有一個驅動力(彈簧h的拉力)。因此,觸頭分斷與手柄無關,同時系統運動與初始條件(四桿、五桿臨界狀態)時的運動規律關系很大。
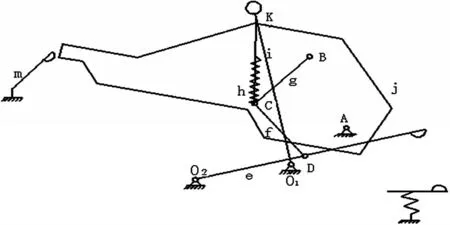
圖4 自由脫扣分斷狀態簡圖
1.3 操作系統的再扣
操作系統的再扣[7]就是使m重新鎖定鎖扣,鎖扣j再次被固定(C、O2兩點固定不動)。此時,系統為e、f、g、CO組成的反四桿機構,觸頭的運動再次與手柄i聯系,在合閘時彈簧h為反四桿機構的驅動力。此時機構為分閘狀態,可以通過搬動手柄i完成手動合閘,如圖5所示。
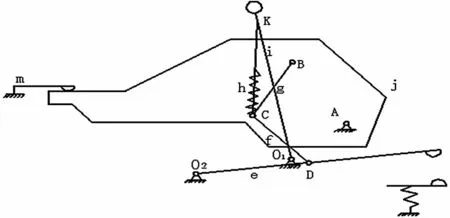
圖5 操作系統再扣狀態
2 塑殼斷路器性能參數優化設計
2.1 塑殼斷路器主要性能指標
2.1.1 觸頭開距
觸頭開距是指動靜觸頭之間的最長距離,即分閘狀態時動靜觸頭之間的距離。開距的作用是,在一定的短路電流下動靜觸頭斷開,觸頭之間有一定的間隙空間,能把電弧拉長拉細,增加其自然滅弧能力;也為了在規定的試驗電壓下不被擊穿而引起電弧重燃。原則上觸頭開距越大,電弧越容易被拉長,也就越容易熄滅,但考慮到塑殼斷路器的總體高度已經確定,給下觸頭和附件腔留出合適的空間后,確定開距取21 cm較為合適[8,9]。
2.1.2 觸頭超行程
超程的實際測量方法是,在合閘位置時,移去靜觸頭,測量此時動觸頭繼續運動的距離即為超程。塑殼斷路器操作機構設計時,要保證在斷路器電壽命結束前,動靜觸頭仍能可靠的接觸。一般規定,超程設計范圍為2~4 mm。
2.1.3 觸頭終壓力
斷路器的觸頭終壓力主要取決于觸頭通過較大電流時,不至于因電動斥力產生跳動而引起熔焊。但它有別于采用短路電流產生的很大電動斥力,使得短路電流尚未達到最大值時,觸頭在瞬動機構動作之前被斥開,以取得限流的效果。因此,觸頭終壓力是個限定范圍內的值。脫扣器設計值是在12倍額定電流(100 A)即1200 A時開始動作,在電流1200 A時,得電動斥力為5 N,而當電流增大到2400 A(短路電流)時電動斥力為10 N左右。因此,設定觸頭終壓力為每相大約10 N。
2.2 塑殼斷路器相關參數及空間尺寸計算
斷路器手柄處于合閘位置,彈簧力作用線KC與上連桿BC有一定的夾角ALF,稱為合閘安全角,這時下連桿CD上的分力就是觸頭系統的合閘力,該力相對與主軸回轉中心O2的轉矩就是合閘力矩,如圖6所示。
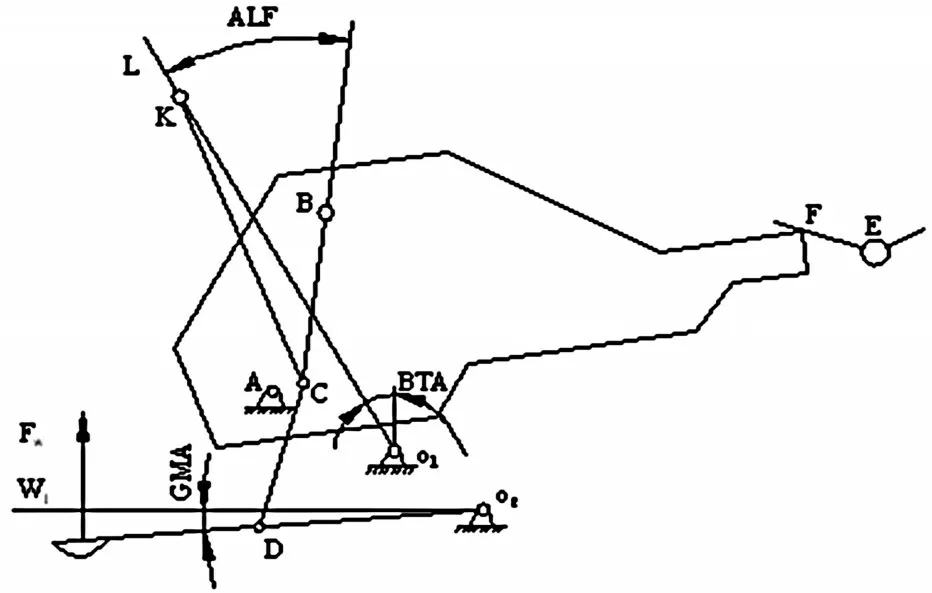
圖6 合閘力及力矩計算圖
合閘力矩,即下連桿CD受力對O2的轉矩,設合閘時觸頭反力(給定的觸頭初壓力)為Fw,則求出相應的反力矩和安全合閘條件。
根據圖6建立的對應坐標系,如圖7所示。
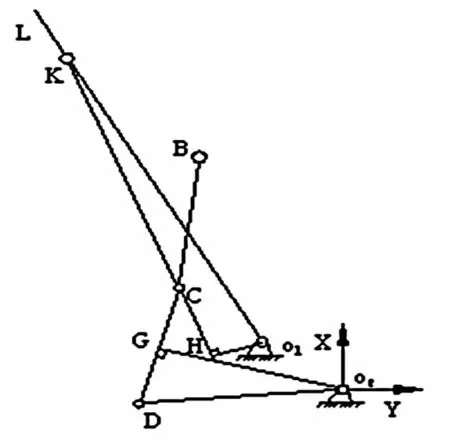
圖7 操作機構坐標系
主軸回轉中心O2為坐標系原點,給出下列參數。
點坐標:A、O1、E坐標;B相對于A的坐標(兩種狀態:再扣和自由脫扣)、F相對于E的坐標。
各杠桿長度:Lab、Lbc、Lcd、Ldo2、Lko1、Lw1o2、Llo1。
結構角度:手柄LO1與垂直方向(Y軸)夾角BTA;觸頭支架DO2與X軸負方向夾角GMA。
彈簧原長L,剛度K=Gd4/(8D32n),G剪切彈性模量,中徑D2,簧絲直徑d,有效工作圈數n。
通過受力分析,可以進行合閘力計算,計算出開閘力、脫扣力、再扣操作力等相關力和力矩。最終,在開距、超程、觸頭壓力確定后,初步確定機構各桿件的長度和位置尺寸:Lab=21 mm、Lbc=19.5 mm、Lcd=15 mm、Lo2a=18 mm。
3 塑殼斷路器的三維建模
3.1 斷路器零部件繪制
塑殼斷路器動觸頭支架的實體模型如圖7所示,可以通過Pro/E的建模命令完成繪制。
3.2 斷路器關鍵部件應力分析
采用Pro/E軟件,可以對塑殼斷路器的各個部件進行應力分析。本文以斷路器脫扣器的一個面的反射命令為例,展示其應力的空間分布,如圖8所示。如果顯示的條紋間隔較為均勻且沒有突然的跳動,說明不存在應力集中問題。否則,如果存在應力集中的問題,就必須結合設計要求,在不影響產品性能的前提下對零件參數進行動態調整。
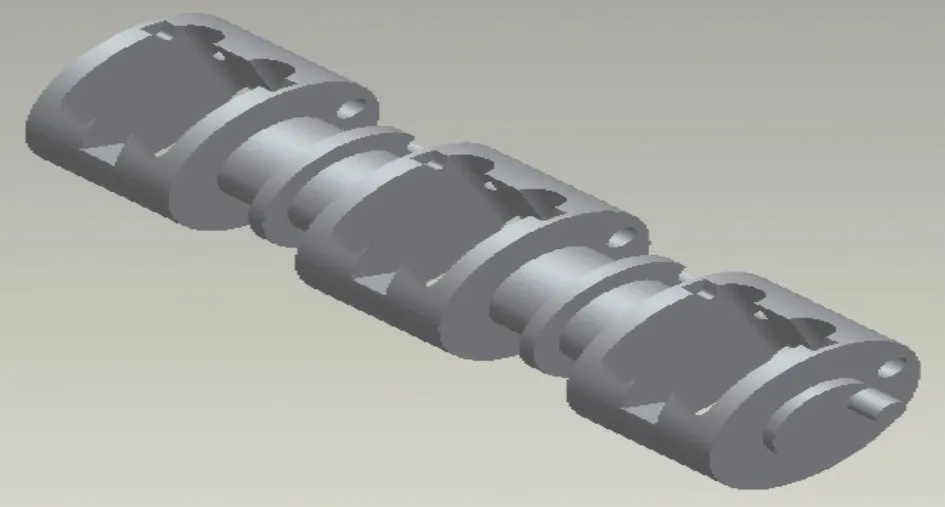
圖8 動觸頭支架實體模型圖
3.3 塑殼斷路器Pro/E動態仿真
3.3.1 斷路器的裝配和分解
Pro/E為我們提供了裝配和分解,所有零件裝配起來了如圖9所示。裝配圖可以給人直觀的產品效果,可以更好地發現裝配時各個零件的安裝關系。
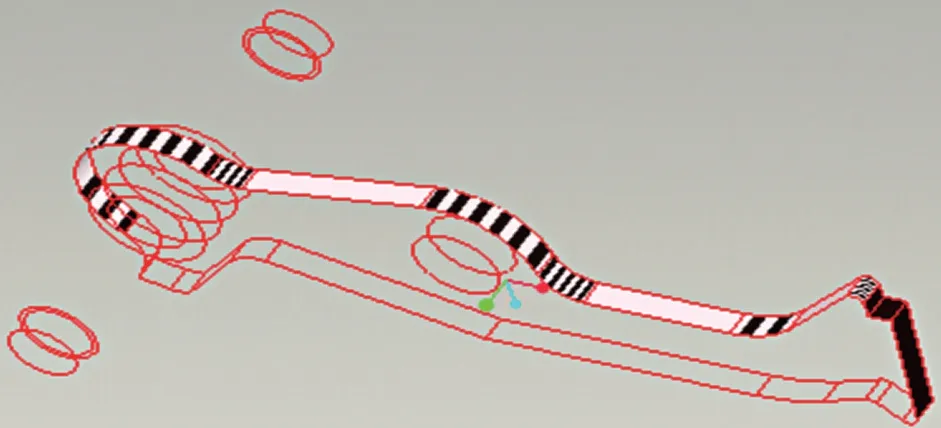
圖9 條紋狀應力空間分布分析圖
3.3.2 操作機構動作過程仿真、分析及應用
動作過程仿真:三維模型的動態仿真能讓設計者看清操作機構的整體運動狀態,各零件間的相互運動關系,是否有干涉,而Pro/E的測量分析為產品提供了良好的性能驗證途徑。
首先,生產分析的測量結果,彈出測量結果對話框。其次,創建測量目標,系統提供了速度、加速度、沖力、沖量等一系列相關測量目標。最后,獲得分析測量結果,如圖10所示。
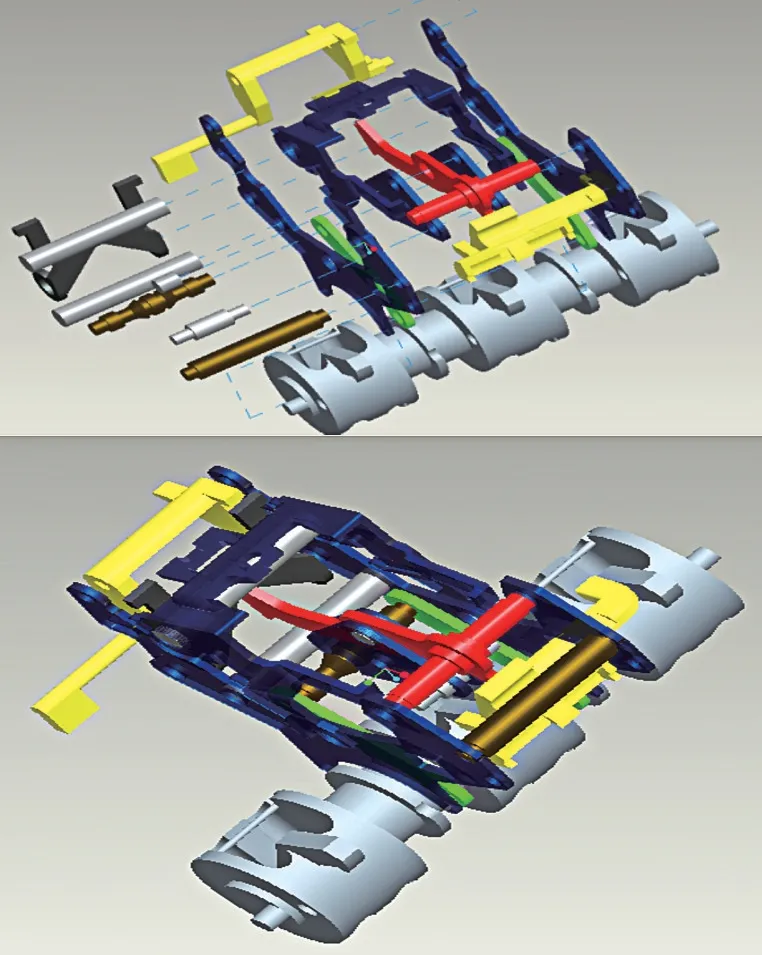
圖10 模型分解與裝配
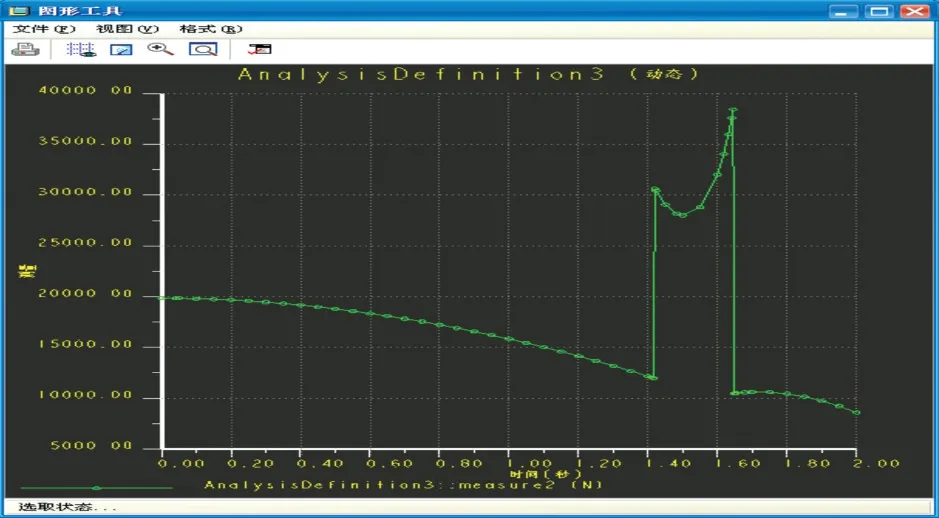
圖11 分析測量結果圖
仿真結果分析及應用:由圖10可知,曲線表示搖臂和跳扣之間的相互作用力,是在塑殼斷路器合閘的過程中測得的。由測量結果可以獲得下列參數變化規律和設計成果:
由于彈簧一開始處于拉伸狀態,隨著搖臂的轉動彈簧長度開始縮短,彈簧力開始逐漸減小;
在t=1.4 s時,相互作用力急劇上升,其原因是跳扣處存在一個曲率較大的圓弧。當圓弧曲率越大時,相互作用力就越大;相互作用力越大,所需要的合閘力也就越大。
根據上述仿真過程及結果,通過動態調整跳扣中曲率較大圓弧的曲率大小,并調整合閘力的大小,對低壓塑殼斷路器的跳扣進行優化設計。經實測和工程驗證,所設計跳扣能在合閘力作用下平順、可靠地被鎖扣鎖住,確保低壓供用電系統中塑殼斷路器的靈敏可靠動作。
4 結束語
塑殼斷路器的操作機構是實現其功能和性能的關鍵。本文利用計算機輔助設計專業軟件和仿真工具開展塑殼斷路器的優化設計,主要工作與結論如下:
低壓塑殼斷路器的工作原理及動作過程須要根據新型配電網建設和發展的實際不斷進行更新;
采用Pro/E專業軟件,可以有效進行斷路器的三維建模、尺寸優化和動作機構應力分析;
再進行計算機三維動態建模和仿真之前,須要預先建立斷路器操作機構及關鍵零件的幾何關系和受力分析數學模型;
通過運動過程的動態仿真,可以獲得操作機構及零件的最優尺寸、結構關系和整體運動特性,進而對跳扣裝置進行優化設計,保證低壓塑殼斷路器的靈敏和可靠動作;
計算機輔助設計和仿真,可以取代常規的樣機制作和物理實驗驗證,顯著減少設計周期、提高設計效率、并節省大量人力、物力和財力。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
海峽姐妹(2017年7期)2017-07-31 19:08:17
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
Coco薇(2017年5期)2017-06-05 08:53:16
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41