基于FMCW雷達(dá)的鋼筋混凝土檢測方法研究
2022-11-24 13:07:50王權(quán)李國洪
傳感器世界 2022年9期
王權(quán) 李國洪
天津理工大學(xué) 天津市復(fù)雜系統(tǒng)控制理論及應(yīng)用重點實驗室,天津 300384
0 前言
在對鋼筋混凝土進(jìn)行檢測時,鋼筋保護(hù)層厚度和鋼筋的位置是影響無損檢測的因素之一[1-3]。使用雷達(dá)對鋼筋混凝土進(jìn)行檢測具有速度快、操作方便、可連續(xù)檢測、結(jié)果精確直觀的優(yōu)點。而FMCW雷達(dá)具有低功耗、高分辨率和高集成度的優(yōu)點,可以極大地減小鋼筋混凝土檢測儀的體積和降低成本。FMCW雷達(dá)常用于待測目標(biāo)的距離、速度和方位角的檢測[4]。對于文獻(xiàn)[5]中,F(xiàn)MCW雷達(dá)對鋼筋混凝土檢測的方法具有盲目性、結(jié)果精確度較差的問題,本文對這種方法進(jìn)行改進(jìn),提出一種“一發(fā)兩收”天線結(jié)構(gòu)的FMCW雷達(dá),檢測出鋼筋與雷達(dá)的距離和方位角,推導(dǎo)出鋼筋保護(hù)層厚度,從而既得到了保護(hù)層的厚度又計算出了鋼筋的位置,并對此方法進(jìn)行了仿真和驗證。
1 FMCW雷達(dá)工作原理
FMCW雷達(dá)是由調(diào)頻信號發(fā)生器產(chǎn)生掃頻信號,此信號分成兩路[5],一路經(jīng)天線發(fā)射出去,遇到待測目標(biāo)發(fā)生反射,被接收天線接收,經(jīng)過混頻器得到差頻信號。根據(jù)發(fā)射信號與回波信號的頻率差、相位差來獲取目標(biāo)信息的雷達(dá)體制[6]。FMCW雷達(dá)可以對單個或者多個目標(biāo)的距離、角度、速度進(jìn)行測量。以下簡要說明FMCW雷達(dá)測量單個靜止目標(biāo)的距離、角度工作原理。
1.1 FMCW雷達(dá)距離測量原理
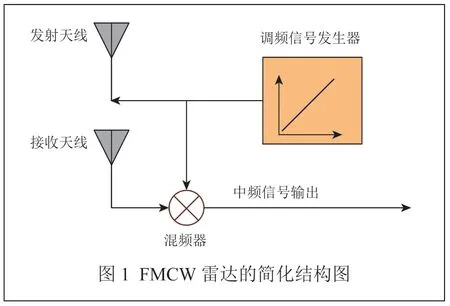
圖1為FMCW雷達(dá)的簡化結(jié)構(gòu)圖,展示了FMCW雷達(dá)的主要射頻元件。FMCW雷達(dá)的調(diào)頻方式一般為鋸齒波調(diào)頻和三角波調(diào)頻。圖2為一個調(diào)頻周期內(nèi)測量相對靜止的目標(biāo)時鋸齒波調(diào)制信號與時間的曲線圖。
首先,信號發(fā)生器產(chǎn)生一個調(diào)頻信號f1,輸?shù)桨l(fā)射天線和混頻器;發(fā)射天線接收到信號之后將信號發(fā)射出去;發(fā)射信號遇到檢測目標(biāo)后產(chǎn)生反射信號f2,并由接收天線接收;之后,混頻器將發(fā)射信號f1與反射信號f2混頻后得到中頻信號Δf。
發(fā)射信號f1為:
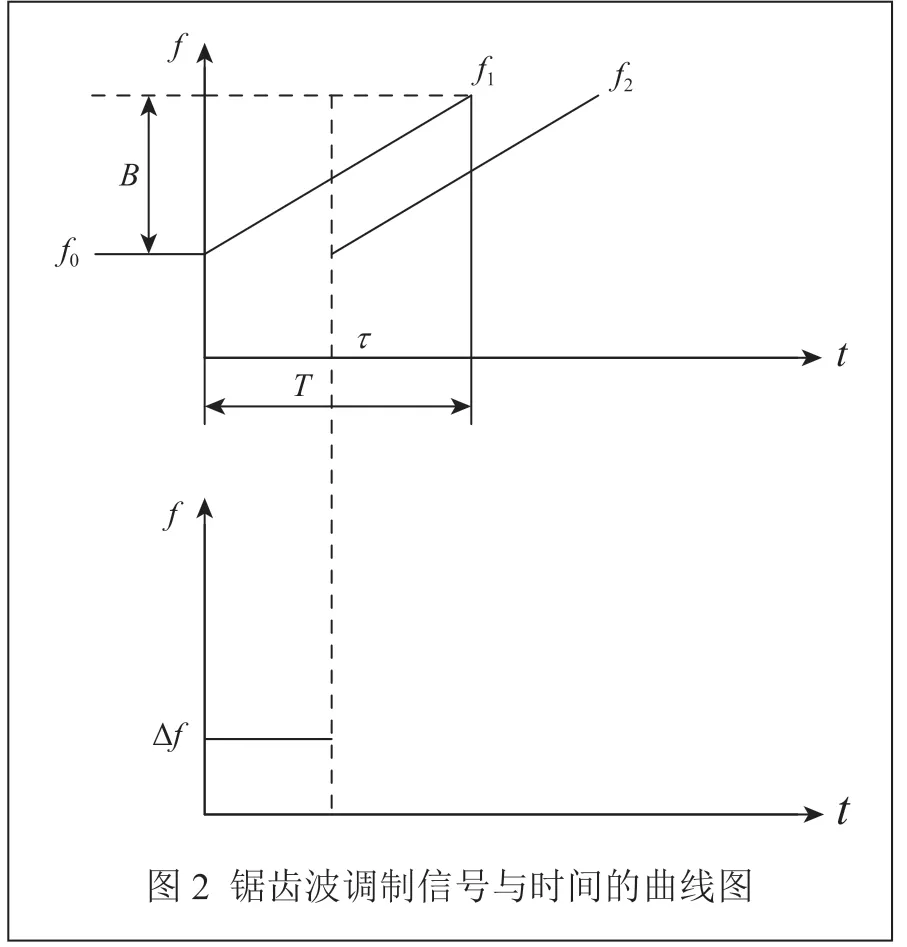

其中,f1為發(fā)射信號;f2為接收信號;B為調(diào)頻脈寬;T為調(diào)頻周期;τ為發(fā)射信號與接收信號的時間延遲;Δf為中頻信號。
反射信號f2為:

差頻信號Δf為:

由于目標(biāo)距離τc/2,故目標(biāo)距離與差頻信號之間的關(guān)系為:

雷達(dá)的距離分辨率為:

1.2 FMCW雷達(dá)角度測量原理
圖3為“一發(fā)兩收”天線結(jié)構(gòu)圖。2個接收天線RX之間的間距為l,待測目標(biāo)與天線之間的方位角為θ,發(fā)射天線發(fā)出調(diào)頻信號,通過2個接收天線接收,然后通過混頻器混頻得到的中頻信號之間的相位不同,提取2個接收天線的相位差Δφ,根據(jù)式(5)即可計算出待測目標(biāo)的方位角:

其中,λ為波長,l=λ/2,當(dāng)ω>0時,表示待測目標(biāo)在雷達(dá)的左邊,當(dāng)ω<0時,則表示待測目標(biāo)位于雷達(dá)的右邊[7]。
2 鋼筋保護(hù)層厚度檢測建模及分析

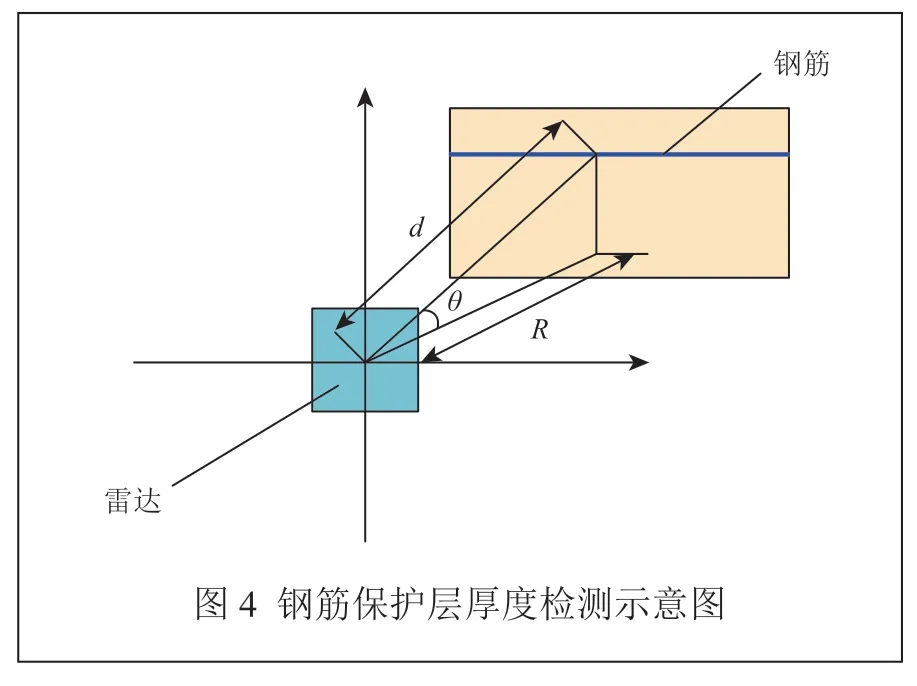
圖4為鋼筋保護(hù)層厚度檢測示意圖。建立FMCW雷達(dá)測量鋼筋保護(hù)層厚度的數(shù)學(xué)模型,從而推導(dǎo)出保護(hù)層厚度R的計算公式。對中頻信號作快速傅里葉變換(Fast Fourier Transform,F(xiàn)FT),得到雷達(dá)與待測目標(biāo)的距離d[8],然后再對兩接收天線的回波數(shù)據(jù)作FFT,得到待測目標(biāo)的方位角θ,代入式(7)即可計算出鋼筋保護(hù)層的厚度R。
將式(4)和式(5)代入R=dcosθ,得:

2.1 計算待測目標(biāo)與雷達(dá)距離d
離散傅里葉變換(Discrete Fourier Transform,DFT)是分析信號頻域特性的一種重要工具,而FFT并不是一種新的變換方法,它是一種利用DFT的奇、偶、虛特性將長序列分解,是一種與DFT完全等效的一種換算方法[9-11]。
設(shè)x(n)是長度N=2β(β為整數(shù))的序列:

設(shè)n=2r與n=2r+1(r為整數(shù)),則:
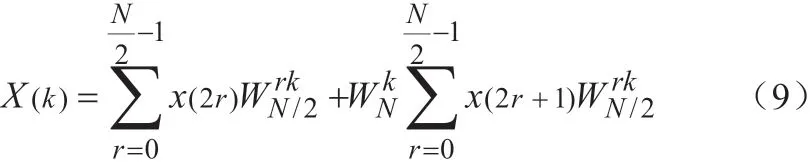
令:
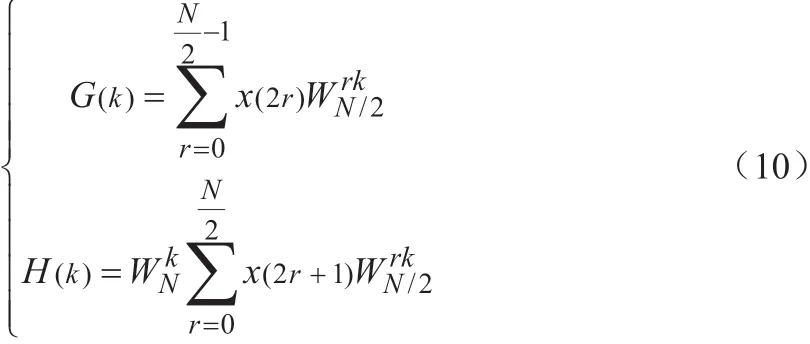
則式(8)可寫為:

式(11)表明,求N點的DFT只需求2個N/2點的DFT,H(k)和G(k)減少了直接傅里葉變換的計算量。
設(shè)一個周期內(nèi)線性調(diào)頻連續(xù)波雷達(dá)的發(fā)射信號為:

其中,A1為發(fā)射信號的幅值為發(fā)射信號的初相位。
經(jīng)過時間延遲τ之后,回波信號變?yōu)椋?/p>

其中,A2是回波信號的幅值。
經(jīng)過混頻器混頻之后得到差頻信號的表達(dá)式為:

其中,A是差頻信號的幅值。
對式(14)作FFT,得到單峰值頻譜圖,其峰值對應(yīng)的頻率就是Δf,代入式(4)即可計算出待測目標(biāo)與雷達(dá)的距離d。
2.2 計算待測目標(biāo)方位角θ
本文采用的是“一發(fā)兩收”的線性調(diào)頻連續(xù)波雷達(dá)結(jié)構(gòu)。發(fā)射信號經(jīng)發(fā)射天線發(fā)出后遇到待測目標(biāo);反射回來的反射回波被2個接收天線接收,由于2個接收天線之間存在距離為l的間距,使反射回波存在波程差[12]lsinθ;將2個接收天線接收到的回波信號分別與混頻器混頻,得到2個中頻信號SIF1(t)和SIF2(t);最后對這2個中頻信號作FFT,得到相位不同的2個尖峰。
接收天線RX1與RX2接收的回波數(shù)據(jù)經(jīng)混頻后得到的中頻信號[13]為:

其中,AX1、AX2分別是兩中頻信號的幅值;τ1、τ2分別是延遲時間。
對式(14)兩中頻信號作FFT,得到其對應(yīng)差頻頻率Δf1和Δf2,將其分別代入式(3)得:

則由于波程差產(chǎn)生的相位差為:

由于π(τ22-τ21)<<2πf0(τ2-τ1),故式(17)可改寫為:

將式(18)代入式(6)即可計算出待測目標(biāo)的方位角θ,由此可確定鋼筋的位置。
3 仿真分析
對上述方法進(jìn)行仿真,考慮到角度分辨率與測角精度,對測量角度范圍選取為-60°~60°鋼筋混凝土的厚度與理論值對比并分析測量精度。雷達(dá)的參數(shù)選取為:調(diào)頻連續(xù)波雷達(dá)的調(diào)頻帶寬B為300 MHz;調(diào)制周期T為0.2 ms;中心頻率f0為10 GHz。雷達(dá)的發(fā)射信號、接收天線RX1與RX2的回波信號、差頻信號的仿真結(jié)果如圖5、圖6所示。混凝土承重柱的保護(hù)層厚度一般為70 mm,設(shè)在此厚度下待測目標(biāo)與雷達(dá)的距離為140 mm,得到如圖7、圖8所示頻譜。根據(jù)圖7、圖8可知,鋼筋的方位角為56.1°右側(cè),誤差為3.9°,混凝土的厚度為75.5 mm,誤差為5.5 mm。
在-60°~60°的仿真結(jié)果如表1所示。由表1可知,在鋼筋附近,-60°~60°范圍內(nèi)均可檢測出鋼筋的位置,越接近0°,檢測精度越高,在±10°時誤差為0.4°。
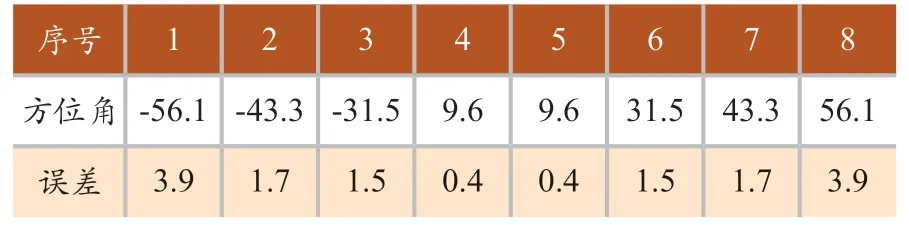
表1 方位角仿真結(jié)果(單位:°)
鋼筋保護(hù)層厚度的仿真結(jié)果如表2所示。由表2可知,隨著方位角的減小,鋼筋保護(hù)層厚度的檢測精度就越高,在±10°時,檢測誤差為2.6 mm。



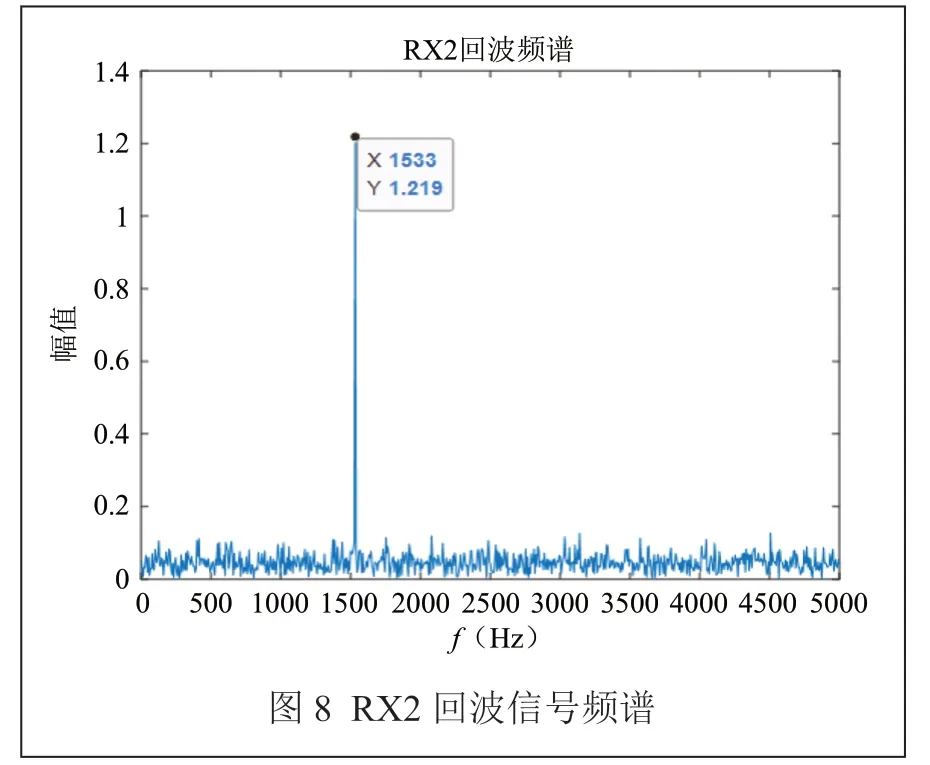
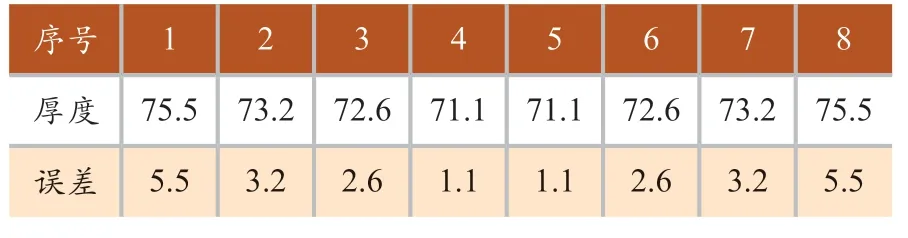
表2 鋼筋保護(hù)層厚度仿真結(jié)果(單位:mm)
4 結(jié)束語
本文對FMCW雷達(dá)的測距、測角原理進(jìn)行了分析,結(jié)合雷達(dá)測距和測角原理推導(dǎo)出鋼筋保護(hù)層厚度的數(shù)學(xué)模型,提出了一種操作方便的鋼筋混凝土檢測方法。通過對FMCW雷達(dá)的中頻信號作FFT,得到鋼筋的位置信息和鋼筋與雷達(dá)的距離信息,計算出鋼筋保護(hù)層的厚度并與理論值進(jìn)行對比。仿真結(jié)果表明,該方法的準(zhǔn)確度與精確性在鋼筋附近-60°~60°內(nèi)檢測誤差為0.4°,保護(hù)層厚度的檢測誤差最小為1.1 mm。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
