融合駕駛風格識別的插電式混合動力汽車自適應控制策略
2022-11-25 01:03:04李奎良林歆悠
福州大學學報(自然科學版) 2022年6期
李奎良,林歆悠
(福州大學機械工程及自動化學院,福建 福州 350108)
0 引言
插電式混合動力汽車(plug-in hybrid electric vehicle,PHEV)因其電池容量大、外部充電、續航里程長等優點而越來越受歡迎[1].然而,擁有良好的能量管理策略是 PHEV 性能的基礎.事實上,能量管理策略不僅受交通環境的影響[2],而且與駕駛方式也有很大關系[3].研究表明,喜歡提高駕駛速度和加速度的駕駛員會經歷25%至68%的油耗增加[4].因此開展駕駛風格識別的研究和基于識別的駕駛風格設計能量管理策略具有重要意義.
許多學者研究了駕駛方式對傳統車或PHEV燃油經濟性的影響[5].在文獻[6]中,在線部分執行所涉及的能量管理策略,將駕駛員的駕駛風格納入等效消耗最小化策略(ECMS)中.文獻[7]使用模糊邏輯控制器將典型的駕駛循環分類為不同的駕駛模式,并識別實時駕駛模式.實現駕駛員風格識別的第一步是提取特征參數.影響駕駛風格的因素很多,如駕駛員的性格特征、駕駛條件、環境因素等[8],而識別駕駛類型的常用方法是機器學習和基于規則的算法.文獻[9]提出一種支持向量機方法來識別駕駛風格并將駕駛員分為兩類:激進型和溫和型.通過K-means聚類對駕駛風格進行聚類,在此基礎上采用支持向量機算法對駕駛風格進行識別,縮短了識別時間,提高了駕駛風格的識別率,同樣,Wang等[10]提出一種半監督支持向量機識別方法來提高10%左右的分類準確率.在文獻[11]中,卷積神經網絡用于提取特征參數,還使用 CNN 對智能手機收集的加速度數據提取有關駕駛風格、車輛、環境和人類特征的知識.在文獻[12]中,使用K-最近鄰(KNN)、神經網絡和隨機森林等幾種方法將駕駛風格分為正常駕駛和激進駕駛,結果表明具有前向選擇的KNN取得了良好的性能.文獻[13]設計了一種基于模糊邏輯的駕駛風格識別系統,對不同的駕駛風格進行分類,控制魯莽駕駛,進而減少交通事故的發生.
盡管已有一些學者將駕駛風格融合到能量管理控制策略的研究中,但大多數對駕駛風格的分類過于簡單,這使得設計EMS的連續控制過程變得不靈活.本研究搭建模糊邏輯和神經網絡識別模型,將駕駛風格分為6類,提出融合駕駛風格識別的ECMS控制策略,實現基于駕駛風格的等效因子自適應調整.
1 PHEV主要零部件

圖1 插電式混合動力汽車結構Fig.1 Plug-in hybrid electric vehicle structure
PHEV的動力系統結構如圖1所示,發動機和電機可單獨驅動,也可混合驅動,混合驅動的最優轉矩分配即可達到最優的燃油經濟性.
結合PHEV的縱向動力學特性,汽車在行駛時受到的總阻力矩可表達如下:
Tf_all=Tf+Ti+Tw+Tj=mgrfcosα+

(1)
其中:Tf_all為整車的總阻力矩;Tf、Ti、Tw、Tj分別為滾動阻力矩、坡度阻力矩、空氣阻力矩和加速阻力矩;m為整車的質量;α為所行駛的工況坡度;ρair是空氣密度;Cd是空氣阻力系數;Acar為車輛的前擋風面積;r是車輪的半徑;δeng為汽車的旋轉質量換算系數;g為重力加速度;v為車速;t為時間.
2 駕駛風格識別算法
考慮到不同的駕駛風格對車輛的燃油經濟性和排放性能也有很大影響,在本研究中,將駕駛風格融入到能量管理控制策略的制定中,以促進插電式混合動力汽車的燃油經濟性和排放性能.駕駛風格的識別主要分為駕駛風格數據的采集和駕駛風格識別算法的應用,模糊控制不需要建立精確的數學模型且有較強的魯棒性,能夠解決一些非線性的數學求解問題,因而可以應用到駕駛風格的識別中,而神經網絡基于歷史數據的訓練過程中,能夠建立出駕駛風格的識別模型從而識別不同的駕駛風格,因而采用該兩種方法進行駕駛風格的識別,并通過后面的仿真分析結果確定最優的駕駛風格識別方法.
2.1 駕駛風格數據的采集
對于駕駛風格識別數據的獲取,首先選擇多名實驗人員進行問卷調查,問卷上均是關于其駕駛習慣的相關問題,并根據回答對測試者進行評分.而后依據評分選擇一名駕駛行為最激進的人來進行模擬駕駛試驗,在駕駛界面上選定運行工況,記錄相應的數據.同理,選擇一名最溫和的實驗員來模擬駕駛試驗,以此來采集溫和型駕駛風格的識別數據.
具體操作如圖2所示,駕駛員在仿真界面上根據兩車的相對距離踩下油門或剎車踏板,此時測試平臺上的數據采集傳感器根據駕駛員的駕駛行為動態記錄對應的數據,將得到的數據進行相應的平滑處理,并進行駕駛工況的劃分,提取出相應的特征參數.記錄出相關的特征參數數據,而車速、加速度和油門開度是影響駕駛風格的3個重要因素.

圖2 駕駛風格數據的采集Fig.2 Collection of driving style data
2.2 基于模糊專家算法的駕駛風格識別
考慮到油門開度變化率可以最好地反映駕駛員對車輛動力需求的緊迫性,結合節氣門開度平均值和節氣門開度標準差,進一步精確識別駕駛風格[14].節氣門開度平均值及其標準差被視為模糊控制器的輸入.通過分析所獲得的數據可進行如下設計.節氣門開度平均值及其標準差的范圍為:[0,0.8],[0,0.4],對應的論域為:小(S),中(M),大(B),選擇的隸屬函數類型為梯形和三角形的組合.輸出的是駕駛員風格,駕駛風格根據其激進風格和溫和型風格分為六種類型,如下所示,Slevel={-3,-2,-1,1,2,3}.平均油門開度均值及其標準差隸屬函數如圖3 所示.模糊推理算法采用常用的Mamdani法,而去模糊化則采用面積重心法將模糊推理結果轉化為實際控制量[15].
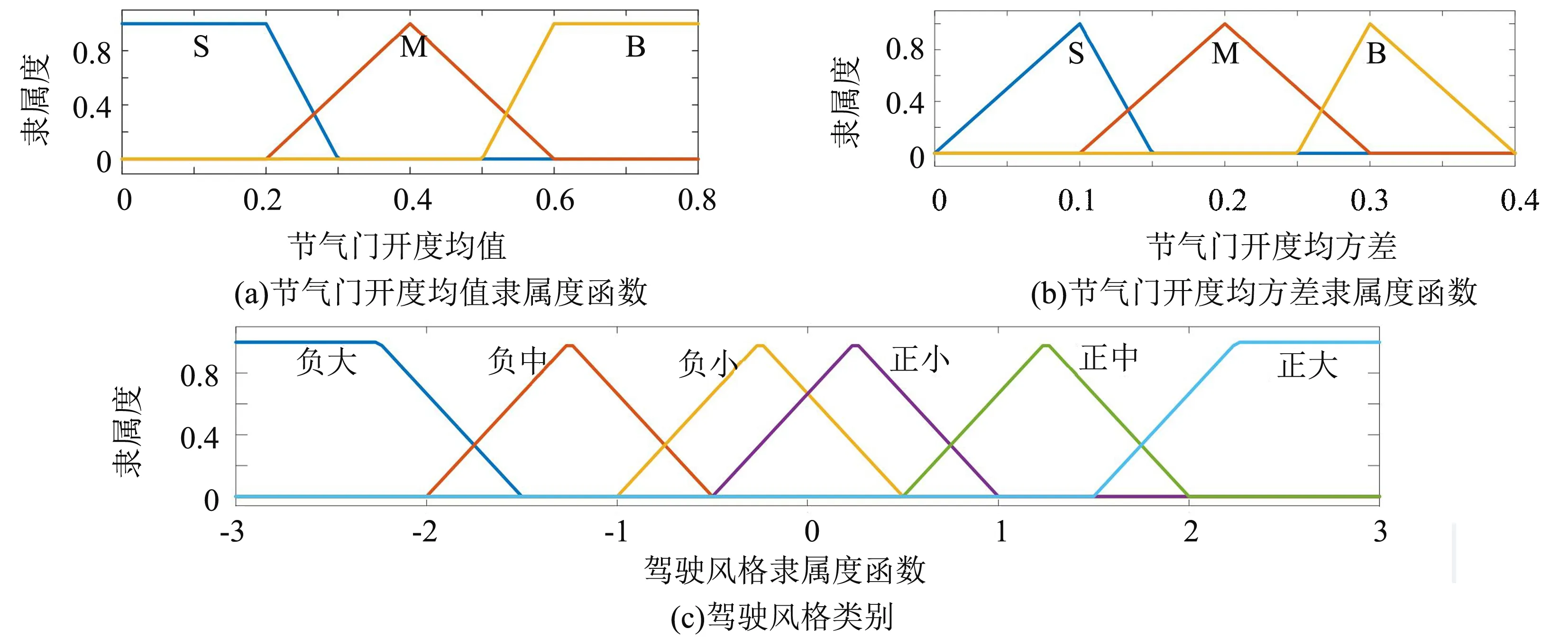
圖3 模糊控制器輸入量及輸出量的隸屬度函數Fig.3 Membership function of the input and output of the fuzzy controller
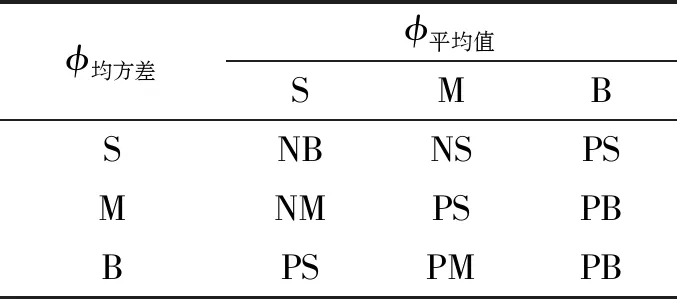
表1 駕駛風格識別的模糊推理規則 Tab.1 Fuzzy reasoning rules for driving style recognition (%)
車輛的節氣門開度均值和節氣門開度均方差越大,則代表車輛加速度越大且相互之間的波動也越大,即代表其急加速急減速的次數較多,也就是說駕駛風格越偏向激進型.歸納的駕駛風格識別的模糊推理規則如表1所示,圖4為其相對應的模糊規則map圖.
2.3 基于神經網絡的駕駛風格識別
為了采用神經網絡算法識別出不同駕駛風格類型,首先引入K-means算法將駕駛員風格類別進行劃分,將駕駛風格類型分為6類.具體操作如下:分別提取溫和型,激進型駕駛員的行駛數據,得到出他們各自的節氣門開度均值,并計算出節氣門開度均方差,并將其作為劃分駕駛風格類別的特征參數,將駕駛風格等級劃分為Slevel={1,2,3,4,5,6},Slevel=6,代表駕駛員操作風格最為激進,分類結果如圖5.
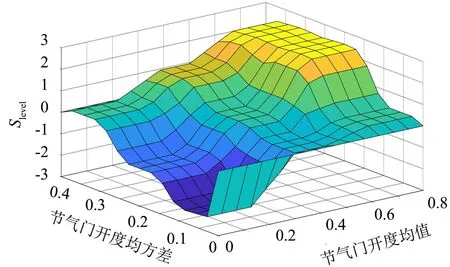
圖4 駕駛員風格識別模糊規則Fig.4 Fuzzy rules for driver style recognition
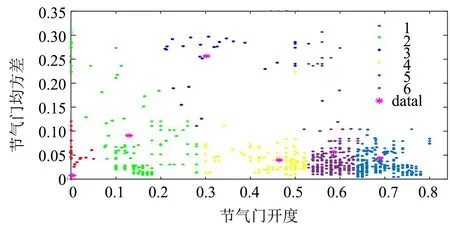
圖5 K-means駕駛風格分類結果Fig.5 K-means driving style classification results
根據分類的結果,以此作為分類依據,用于BP神經網絡的數據訓練,從而實現實時分類駕駛風格類別.BP神經網絡由輸入層、隱含層和輸出層組成[16].將輸出結果和期望結果之間的誤差經中間層反饋給輸入層,通過各網絡層神經元的權值和閾值可以根據誤差的大小進行調節,最終使得輸出結果不斷逼近于期望值.將節氣門開度和節氣門均方差作為神經網絡的輸入層,輸出結果為6種不同程度的駕駛風格類別,神經網絡識別如下.
1) 各網絡層神經元個數的確定.將2個典型的特征參數作為BP神經網絡的輸入,故輸入層的神經元個數為2,即Nin=2,共構建了6種駕駛風格類別,因此神經網絡輸出層的神經元個數為6,Nout=6,即隱含層的神經元個數一般參考經驗公式,即:取α=6,計算得Nh=10.

(2)
2) 選擇神經網絡的激勵函數,訓練函數.分別選擇Tansig函數和Purelin函數作為隱含層和輸出層的激勵函數,公式如下.

(3)
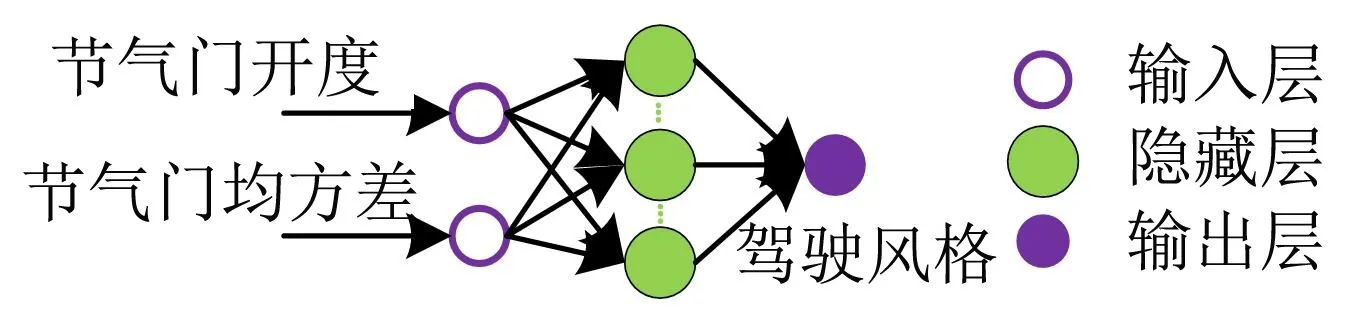
圖6 駕駛風格神經網絡識別模型Fig.6 Driving style neural network recognition model
綜合考慮所采用的BP神經網絡的復雜程度、權值數量和駕駛風格識別的分類情況,最終選擇Trainlm函數作為訓練函數.
3) 迭代次數為1 000次,訓練目標性能為10-6.駕駛風格神經網絡識別模型如圖6所示.
3 融合駕駛風格的自適應控制策略
通過自定義的監督控制策略,混合動力系統中的動力分配可以按照最優化燃料經濟性進行動力系統的分配.采用融合駕駛風格識別的最小等效燃油消耗控制策略(ECMS)進行能量的分配.
3.1 ECMS的制定
ECMS是一種實時方法,無需使用有關未來的信息,將全局優化問題簡化為瞬時最小化問題.在數學上,混合動力系統在燃油經濟性方面的優化控制問題可以概括為

(4)
對于求解方程(4)使用龐特里亞金極小原理(PMP)構造Hamilton函數求解[17],如下:

(5)
其中:λ(t)是拉格朗日乘數.基于 PMP,共態方程表示如下:
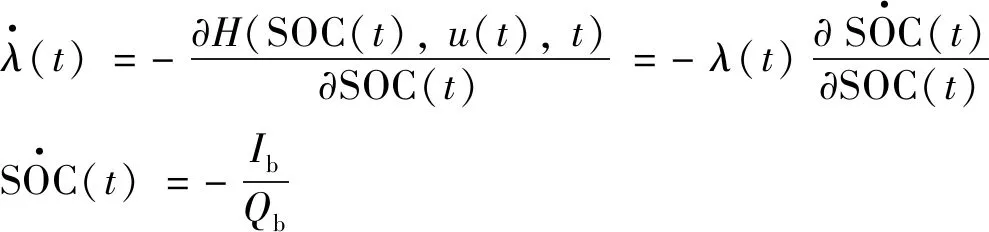
(6)
(7)
其中:SOCf代表行程結束時電池的 SOC 值;SOCobj是目標 SOC 值;SOCmin、SOCmax分別是電池的最小值和最大值.動力電池的功率由下式得到:
Pb(t)=IbVoc
(8)
式中:Voc表示電池的開路電壓.結合式(6)和(8),則式 (5) 可改寫為:

(9)
結合等式(6)和(9),s(t)可以表示為:
(10)
對于 PHEV,ECMS的關鍵是找到最佳的等效因子s(t)以獲得電池和發動機能量的最佳實時分配.然而,在標準 ECMS 中,等效因子是恒定的,不能適應不同駕駛員,因此要針對不同駕駛風格來相應調整等效因子,以實現等效因子隨著駕駛風格的變化而變化,提高整車控制策略對于不同駕駛員的適應性.
3.2 融合駕駛風格的A-ECMS制定
為了獲得最小總燃油消耗,有必要使控制策略的制定適應個體駕駛員.因此,本研究提出融合駕駛風格的自適應ECMS(AECMS)的制定.對于電荷可持續性,等效因子通常根據SOC與其參考值的偏差(SOC(t)-SOCr)進行自適應調整.自適應等效因子的表達式如下:

(11)
將式(11)用更為精確的PI 控制器控制,如下式所示:

(12)

為了確定實時等效因子的系數,將考慮駕駛風格的參考SOC與實時SOC的差值及其變化率作為模糊控制器的輸入.對兩個輸入信號的模糊化,以及基于模糊規則的模糊推理,最終推理出比例系數和積分系數兩個輸出.由于三角隸屬函數靈敏度高、計算簡單,因此輸入輸出均采用三角隸屬函數,定義的語言變量為“負大(NB)、負小(NS)、零(ZR)、正小(PS)、正大(PB)”.輸入和輸出字段為[-0.1,0.1]和[-1,1],模糊控制規則如表2和表3所示.
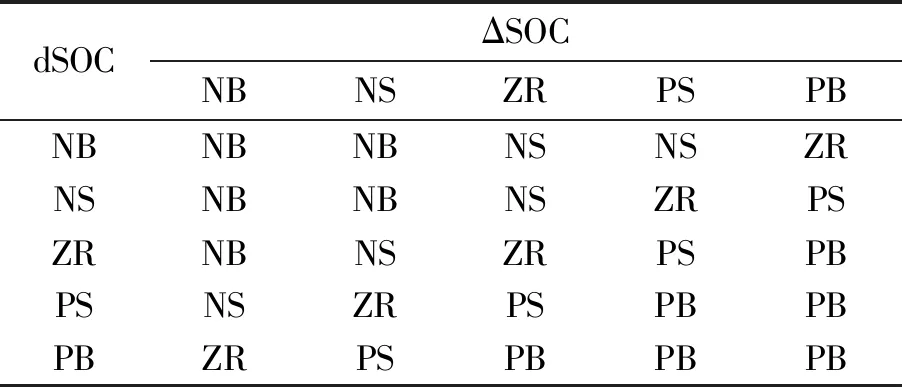
表2 Kp模糊推理規則Tab.2 Kp fuzzy inference rules
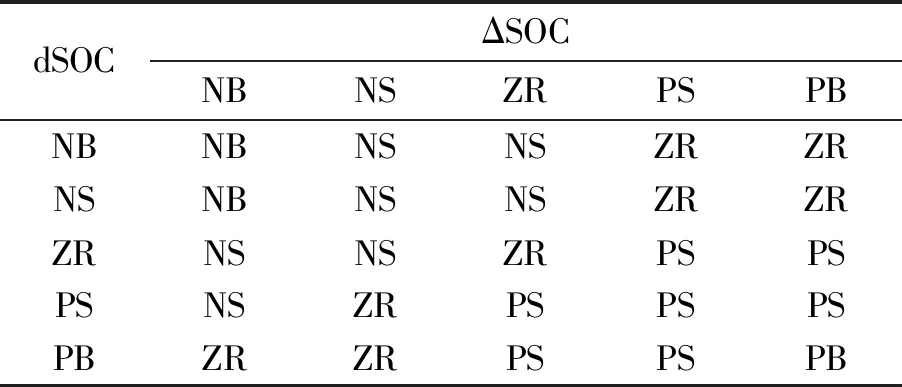
表3 Ki模糊推理規則 Tab.3 Ki fuzzy inference rules
4 實驗驗證及結果分析

圖7 NYCC行駛工況Fig.7 NYCC driving conditions
基于MATLAB/Simulink,搭建適用PHEV性能的仿真模型,采用NYCC工況,針對本研究提出的融合駕駛風格的自適應控制策略進行驗證,如圖7所示.
圖8(a)展示了駕駛員在ECMS控制策略、模糊邏輯識別駕駛風格的自適應ECMS(AECMS_FLC)和神經網絡識別駕駛風格的自適應ECMS(AECMS_NN)控制策略下,SOC隨PHEV行駛的變化.由圖可知,常規ECMS控制策略的SOC曲線在行駛整段路程后,SOC值較低,當融合駕駛風格識別后的ECMS后,SOC值有明顯的提升,此時更能保護電池,延長使用壽命.圖8(b)展示了3種控制策略的油耗(Q)情況,由圖可知,融合駕駛風格的控制策略,因為能夠可以根據駕駛員的駕駛風格對控制策略進行自適應地調整,因而在行駛里程結束時,油耗有明顯的降低,而神經網絡識別駕駛風格對應的控制策略效果更好.圖9(a)展示了時間不變ECMS的等效因子與所提出的融合駕駛風格識別的自適應ECMS控制策略在行駛工況下的變化圖.從圖中可以發現,自適應ECMS控制策略的等效因子隨著時間的延續而不斷發生變化,具有更好的適應性.圖9(b)展示3種控制策略的HC、CO、NOx總排放曲線圖.
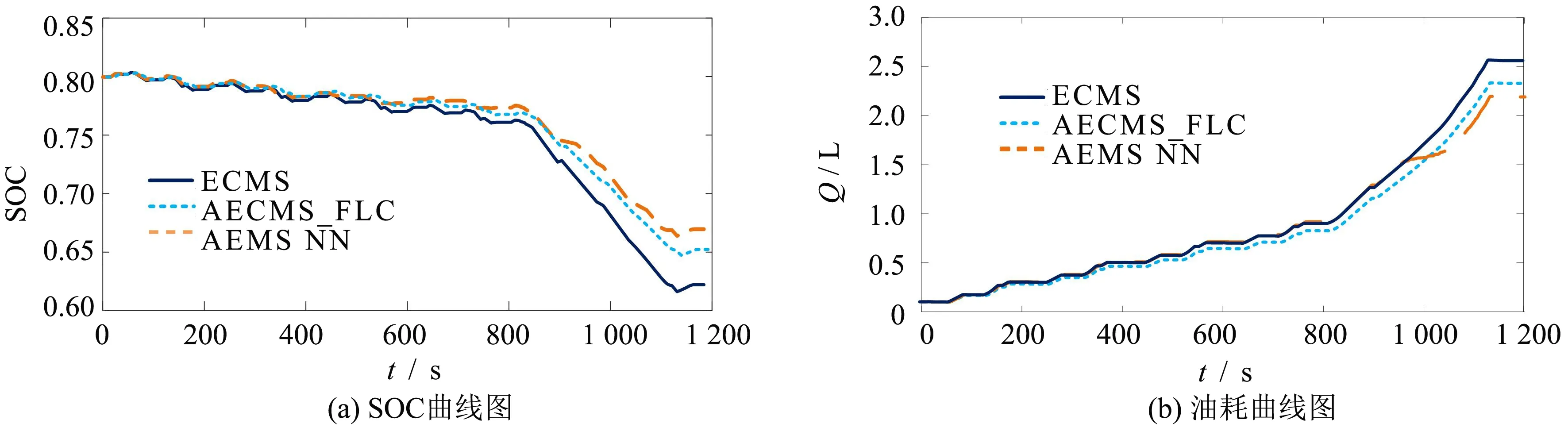
圖8 3種不同控制策略的SOC曲線變化和油耗圖Fig.8 SOC curve change and fuel consumption curve of three different control strategies
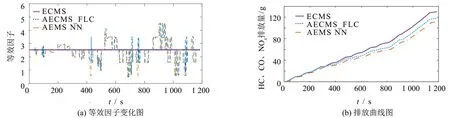
圖9 3種控制策略的等效因子變化圖和總排放曲線圖Fig.9 Equivalent factor change and total emission curve of three control strategies
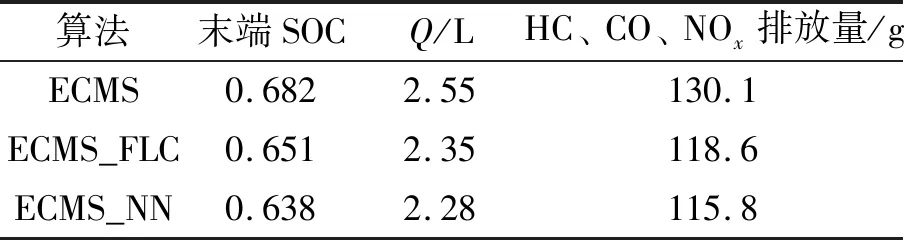
表4 3種控制策略經濟性、排放性對比Tab.4 Comparison of economy and emission of three control strategies
表4為3種控制策略下燃油經濟性和排放性的對比.由表4看出,融合駕駛風格的自適應控制策略的綜合性能有了明顯的提升,其中神經網絡駕駛風格識別的自適應控制策略性能最佳,相比時間不變的ECMS控制策略,油耗(Q)降低10.5%,HC、CO、NOx總排放降低11%.
5 結語
考慮到駕駛員駕駛風格對汽車性能影響,故而將駕駛風格融入到混合動力汽車的能量管理策略中,使得制定的控制策略能夠根據不同的駕駛風格做出自適應的調整,從而提升整車性能.將模糊邏輯、神經網絡識別模型識別出的駕駛風格類別融合到ECMS控制策略的制定,提出融合駕駛風格的自適應ECMS,相比不考慮駕駛風格的控制策略,考慮駕駛風格影響的控制策略在燃油經濟性、排放性能有顯著的提升.取一段工況使用所指定的能量管理策略,仿真結果表明,融合駕駛風格識別的策略在燃油經濟性方面最高提升了10.5%,汽車的HC、CO、NOx總排放最高降低了11%,發動機電機工作點更好地運行在最佳區域中.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車實用技術(2022年4期)2022-03-07 06:07:20
汽車工程師(2021年12期)2022-01-17 02:29:58
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
公民與法治(2016年4期)2016-05-17 04:09:26
通信電源技術(2016年1期)2016-04-16 04:57:26
四川電力技術(2015年5期)2015-12-19 11:04:54