船載嵌入式網絡視頻監控圖像模糊細節增強系統
2022-11-26 12:51:02張俊生赫英鳳仝曉剛
艦船科學技術 2022年19期
張俊生,赫英鳳,楊 鵬,仝曉剛
(1.太原工業學院 電子工程系,山西 太原 030008;2.中北大學信息探測與處理山西省重點實驗室,山西 太原 030051)
0 引言
近年來,信息技術與計算機技術得到了大力的發展與普及,數字視頻技術也迎來了高速發展期,受到多個領域的關注與應用,尤其是航海領域[1]。嵌入式網絡的出現,使得船舶之間通信更加便利、穩定。嵌入式網絡具有較好的適用性與便捷性,能夠直接搭載在船舶,為船舶視頻監控提供有效的支撐。
船載嵌入式網絡視頻監控圖像由于天氣因素、環境因素、設備因素等影響,存在著大量的噪聲點、模糊點,使得視頻監控圖像清晰度較差,細節信息無法得到完整的、準確地顯示,影響視頻監控圖像的應用以及船舶航行狀態的判定,是現今導致船舶航行事故發生的關鍵原因之一[2]。為了避免上述事件的發生,引入模糊集理論提出船載嵌入式網絡視頻監控圖像模糊細節增強系統設計。
1 視頻監控圖像模糊細節增強系統
1.1 視頻監控圖像預處理
由于船舶航行環境較為復雜,致使船載嵌入式網絡視頻監控圖像存在著顏色失真的現象,對細節增強具有不利影響,故通過動態范圍拉伸模式預處理視頻監控圖像。由于圖像細節增強過程中,計算機系統對亮度變化較為敏感,因此在視頻監控圖像預處理過程中只對亮度通道進行處理[3]。為了方便研究的進行,將拉伸后的圖像RGB 顏色空間轉換為HSI 顏色空間,轉換公式為:

上述過程完成了視頻監控圖像的預處理,消除了視頻監控圖像顏色失真現象,為后續視頻監控圖像細節模糊熵的計算奠定基礎。
1.2 視頻監控圖像細節模糊熵計算
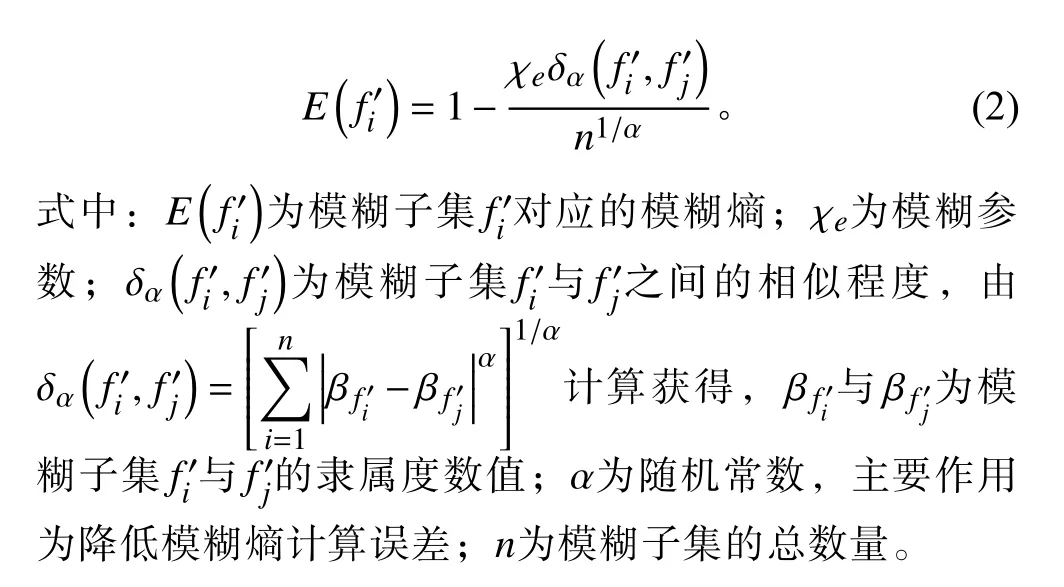
以上述預處理后的視頻監控圖像f′(x,y)為依據,基于模糊集理論計算視頻監控圖像細節模糊熵,為圖像細節增強做好準備[4]。將視頻監控圖像看作為一個模糊集合,傳統系統采用隸屬度函數表示模糊集合的不確定性,其會受到主觀影響,無法實現模糊程度的定量描述[5]。因此,引入模糊熵概念,對視頻監控圖像細節模糊程度進行定量表示。假設視頻監控圖像f′(x,y)模糊集合表示為代表像素i對應的模糊子集,其模糊熵計算公式為:
1.3 最佳模糊參數確定
以獲得的視頻監控圖像細節模糊熵為基礎,利用遺傳算法確定最佳模糊參數,為最終圖像細節增強做準備。遺傳算法具有較強的并行性自動搜索與全局尋優能力,可以在最短時間內獲取最佳模糊參數,以此來降低圖像細節增強運算時間,便于設計系統的實際應用[7]。基于遺傳算法的最佳模糊參數確定程序如圖1所示。
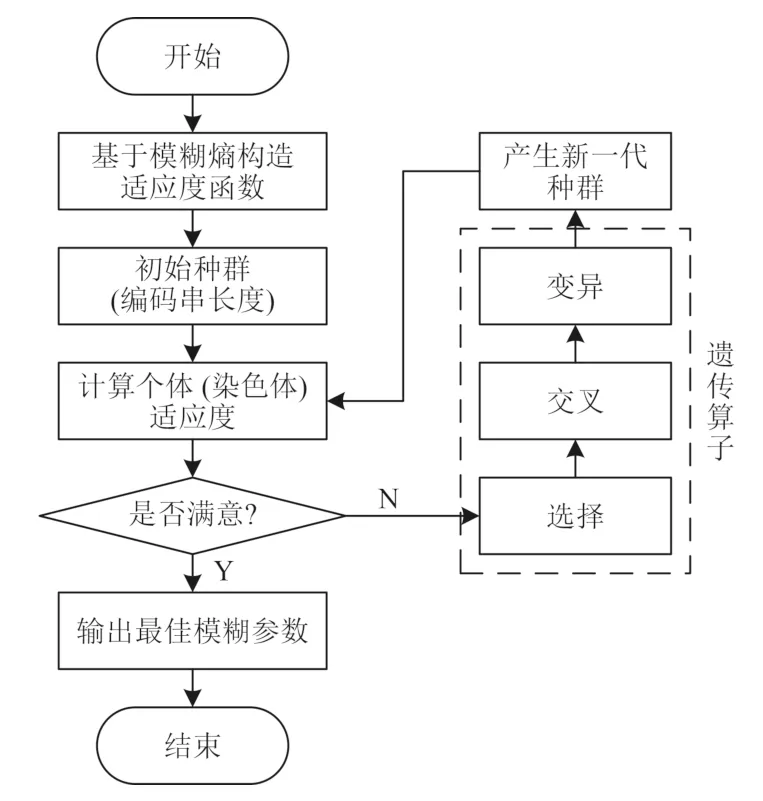
圖1 最佳模糊參數確定程序圖Fig.1 Program diagram for determining the optimal fuzzy parameters
對視頻監控圖像f′(x,y)中的每一個細節進行編碼處理,編碼結果顯示為8 為二進制串,由數字0 與1 構成[8]。另外,由于視頻監控圖像灰度值范圍為[0.255],則模糊參數 χe的取值范圍為[0.255],其初始數值采用隨機方式產生。適應度函數的構造是遺傳算法的關鍵環節,此研究以模糊熵為基礎,構造合理的適應度函數,表達式為:

式中:K(xi)為適應度函數,xi為第i個染色體;M為染色體種群規模;εi為誤差校正項,主要作用是調節適應度數值的計算精度。
依據式(4)對全部個體適應度數值進行計算,以此為基礎,選擇前m個染色體作為交叉、變異操作的對象,設置交叉方式為單點交叉,獲取新的個體,表示為:

計算新染色體的適應度數值,重復進行上述操作,直至適應度數值達到最大值max[K(xi)]為止,其對應的模糊參數 χe即為最佳模糊參數,將其記為。
1.4 視頻監控圖像模糊細節增強
以上述確定的最佳模糊參數為基礎,計算擴散系數,融合視頻監控圖像模糊梯度場情況,應用變分法求解修正隸屬度函數,通過逆變換將視頻監控圖像從模糊域轉換到灰度域,即可獲得細節增強后的船載嵌入式網絡視頻監控圖像。為了體現視頻監控圖像細節的模糊信息,基于最佳模糊參數計算擴散系數,表達式為:

由式(6)可以看出最佳模糊參數與擴散系數之間存在著緊密的聯系,關系擬合曲線如圖2 所示。可知,隨著最佳模糊參數的增大,擴散系數呈現逐漸下降的趨勢,最終趨向于1。擴散系數的添加,可以避免視頻監控圖像邊緣細節過分增強的現象,使增強后的圖像更加柔和。
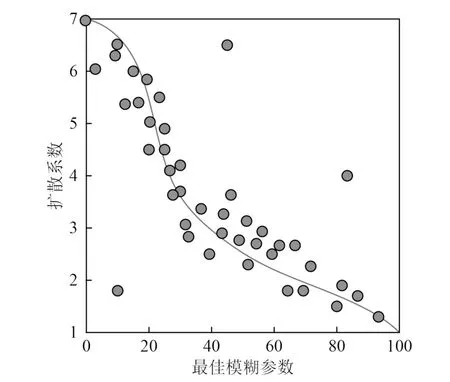
圖2 最佳模糊參數與擴散系數關系擬合曲線圖Fig.2 Fitting curve of the relationship between the best fuzzy parameter and diffusion coefficient
視頻監控圖像模糊梯度場情況也是細節增強的關鍵所在。原始隸屬度函數由視頻監控圖像灰度值決定,表達式為:

式中:β(x,y)為像素素(x,y)對應的隸屬程度;R(x,y)為像素(x,y)的灰度值;Rmin(x,y)與Rmax(x,y)為灰度值的最小值與最大值。
以式(6)計算結果為基礎,獲取像素(x,y)的模糊梯度:Γ(x,y)是模糊梯度數值,可獲得放大后的視頻監控圖像模糊梯度場模型,表達式為:

式中,T(x,y)為放大處理后的圖像模糊梯度場。
以此為基礎,構造泛函公式,表達式為:

2 仿真實驗
2.1 實驗準備
為了驗證設計系統的應用性能,選取某船載嵌入式網絡為實驗對象,內部結構如圖3 所示。船載嵌入式網絡會連接多個客戶端——船舶、岸上基站或者監測設備等,會獲取限定范圍海域的視頻監控圖像,將其作為實驗數據。
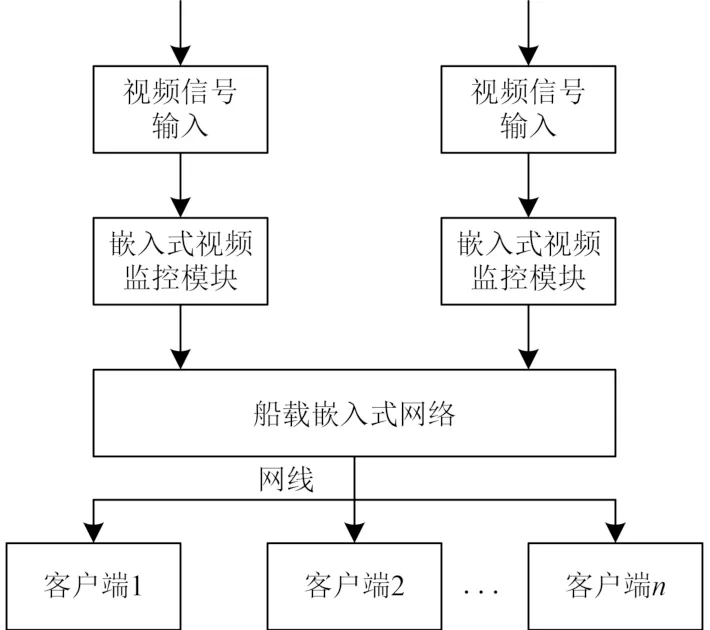
圖3 船載嵌入式網絡結構示意圖Fig.3 Schematic diagram of shipborne embedded network structure
在視頻監控圖像獲取過程中,由于各種因素(設備振動、海上環境等)的影響,使得視頻監控圖像中包含大量的噪聲,并且存在著圖像輪廓不清晰的現象,若是直接將其作為實驗數據,會降低實驗結論的精度。因此,在實驗進行之前,對實驗數據?視頻監控圖像進行預處理。首先,應用中值濾波去除視頻監控圖像中的噪聲,表達式為:

式中:F(i,j)與G(i,j)為含噪與無噪視頻監控圖像;Med{·}為中值濾波函數;M(i,j)為濾波窗口,(s,t)為M(i,j)的子集。
其次,應用拉普拉斯算子銳化處理視頻監控圖像,表達式為:

式中:D(i,j)是銳化處理后的視頻監控圖像;μo為銳化系數。一般情況下,銳化系數 μo越大,視頻監控圖像銳化效果越好;反之,銳化系數 μo越小,視頻監控圖像銳化效果越差。
2.2 實驗結果分析
以實驗準備內容為依據,進行視頻監控圖像模糊細節增強實驗。以某一幅視頻監控圖像為例,基于設計系統對其進行處理,獲得視頻監控圖像模糊細節增強結果如圖4 所示。
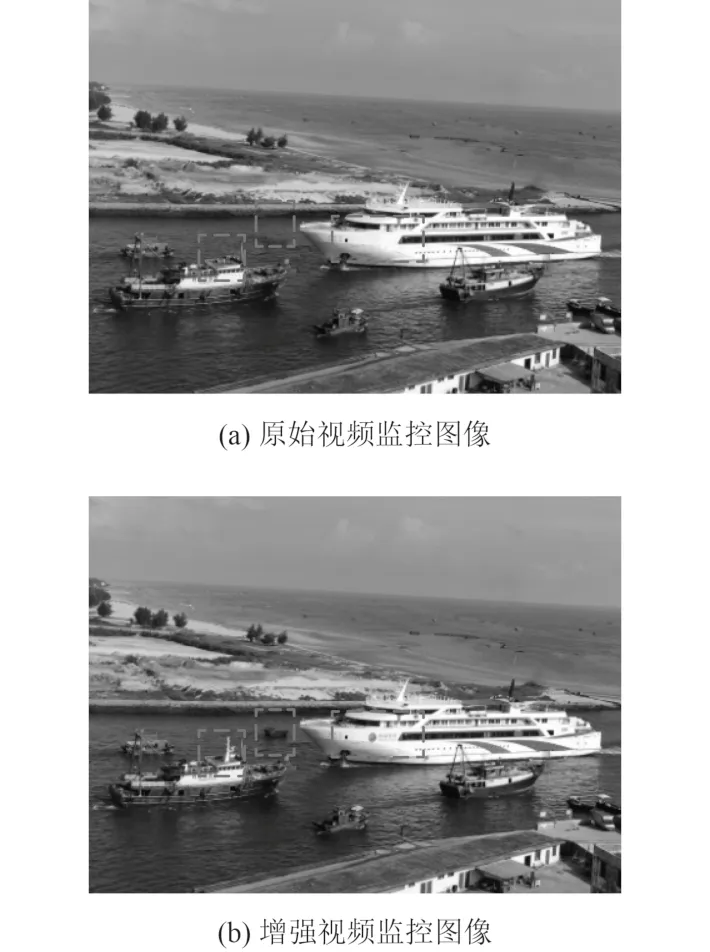
圖4 視頻監控圖像模糊細節增強結果示意圖Fig.4 Schematic diagram of fuzzy detail enhancement results of video surveillance image
可知,應用設計系統后,原始視頻監控圖像中未顯示的細節信息得到了增強與恢復,充分證實了設計系統的可行性。
3 結語
視頻監控是船舶航行過程中的關鍵保障手段,不但能夠對船艙內部、外部環境進行監測,也能通過網絡獲取整個海域情況,實時為船舶航行提供圖像數據支撐。但是,由于海上環境多變,監控設備自身缺陷等多種因素的影響,致使視頻監控圖像存在著細節缺失、模糊等現象,威脅著船舶的航行安全,故提出船載嵌入式網絡視頻監控圖像模糊細節增強系統設計。實驗數據顯示:設計系統大幅度提升了增強圖像的信息熵數值,能獲取具備更對細節信息的視頻監控圖像,為船舶航行決策制定提供精準依據,也為圖像增強相關研究提供一定的借鑒作用。
猜你喜歡
家庭影院技術(2020年10期)2020-12-14 07:53:50
小學生優秀作文(低年級)(2018年10期)2018-10-13 01:56:50
鐵道通信信號(2018年2期)2018-04-18 12:18:23
電鍍與環保(2016年3期)2017-01-20 08:15:32
Coco薇(2016年10期)2016-11-29 19:59:58
上海金屬(2015年5期)2015-11-29 01:13:59
上海金屬(2015年6期)2015-11-29 01:09:09
數學物理學報(2015年2期)2015-02-28 16:06:39
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
自動化博覽(2014年4期)2014-02-28 22:31:15