智能門鎖回力模塊可靠性技術研究
2022-11-26 09:35:34婁彥亮楊玉麗李德念
日用電器 2022年10期
婁彥亮 楊玉麗 李德念
(珠海格力電器股份有限公司 珠海 519070)
引言
智能門鎖具有便捷性、智能化等特點,也受到越來越多的用戶的選擇;但是在使用過程中的“小黑盒事件”“感應卡復制事件”等安全隱患問題也逐漸暴露,所以在門鎖設計制造環節提前識別失效模式并對各項失效模式進行預防控制至關重要。
1 門鎖回力模塊概述
智能門鎖是以數字化認證開鎖方式替代原有的機械鑰匙認證開鎖方式,同時此類產品大多從設計上采用機械鑰匙開鎖在內,并結合密碼、指紋和門卡等多種數字化認證開鎖方式的復合開鎖方式,以進一步提升產品體驗[3]。智能門鎖由前面板、鎖體、后面板;前面板包括含有主芯片的主控電路板、密碼鍵盤、指紋識別模塊、電機和顯示屏、回力模塊等器件,鎖體結構與傳統機械鎖基本相同,后面板大多由通訊模塊如WIFI 等、反鎖控制鍵、回力模塊、電池槽以及后把手構成。
隨著智能門鎖的快速發展,“小黑盒事件”、“感應卡復制事件”等安全隱患問題也逐漸暴露,造成用戶財產和生命威脅。造成智能門鎖的安全隱患主要包括兩大方面,一是產品機械故障,如鎖芯質量、把手回力模塊質量等,可通過貓眼開鎖、撬壓開鎖和機械性技術開鎖等;二是信息安全漏洞,如密碼錄入、指紋或指靜脈生物識別、藍牙解鎖、電磁干擾等產品電子部分漏洞開鎖。所以,如圖1我們需要對智能門鎖進行全面的失效模式分析,才能對失效點逐一進行預防,提升門鎖質量。

圖1 門鎖結構示意圖
回力模塊是控制門鎖開鎖、關門的重要器件之一,如圖2。回力模塊包括離合套、離合套壓片、撥片彈簧、前蓋板、壓片螺絲、蓋板螺絲、執手頭、前底座等。離合套設有固定柱和撥動片,離合套壓片通過螺絲固定于離合套。執手頭前端設有聯動部、軸承部和用于插入把手的把手部。當給執手頭施加旋轉力時,離合套設有固定柱和撥動片會帶動套于換向撥片的撥片彈簧壓縮,同步帶動離合套旋轉;松開執手頭施加旋轉力,壓縮彈簧會帶動離合套自動旋轉會原始位置。本文研究的是外面板把手回力模塊失效問題。

圖2 回力模塊示意圖
2 回力模塊失效驗證及原因分析
2.1 失效原因分析
團隊在進行智能門鎖性能和可靠性試驗測試時,出現門鎖鎖門功能失效且把手沒有回彈力,進一步拆機檢查發現為回力模塊失效導致。如圖3經對故障件回力模塊進行拆解核實,發現為回力模塊內部回力彈簧彈出,導致轉動把手時,彈簧無法頂住回力模塊內限位塊帶動門鎖開關鎖動作,而出現開關鎖失效情況。

圖3 回力模塊失效故障圖
對此,進一步分析回力彈簧彈出原因,失效模式包括門鎖安裝原因、把手用力不當導致彈簧彈出等外部原因,和把手回力模塊彈簧性能異常、彈簧尺寸不滿足要求、回力模塊限位塊異常、螺釘凸臺異常等產品本身質量原因。通過模擬轉動把手開關門使用,發現在多次轉動后會存在一定比例回力模塊失效情況,且故障現象和故障件一致,確定為產品本身質量問題。把手回力模塊在零部件引入時,測試10萬次壽命實驗沒異常。對此,把故障件和前期實驗無異常樣品進行結構對比分析,具體見表1。
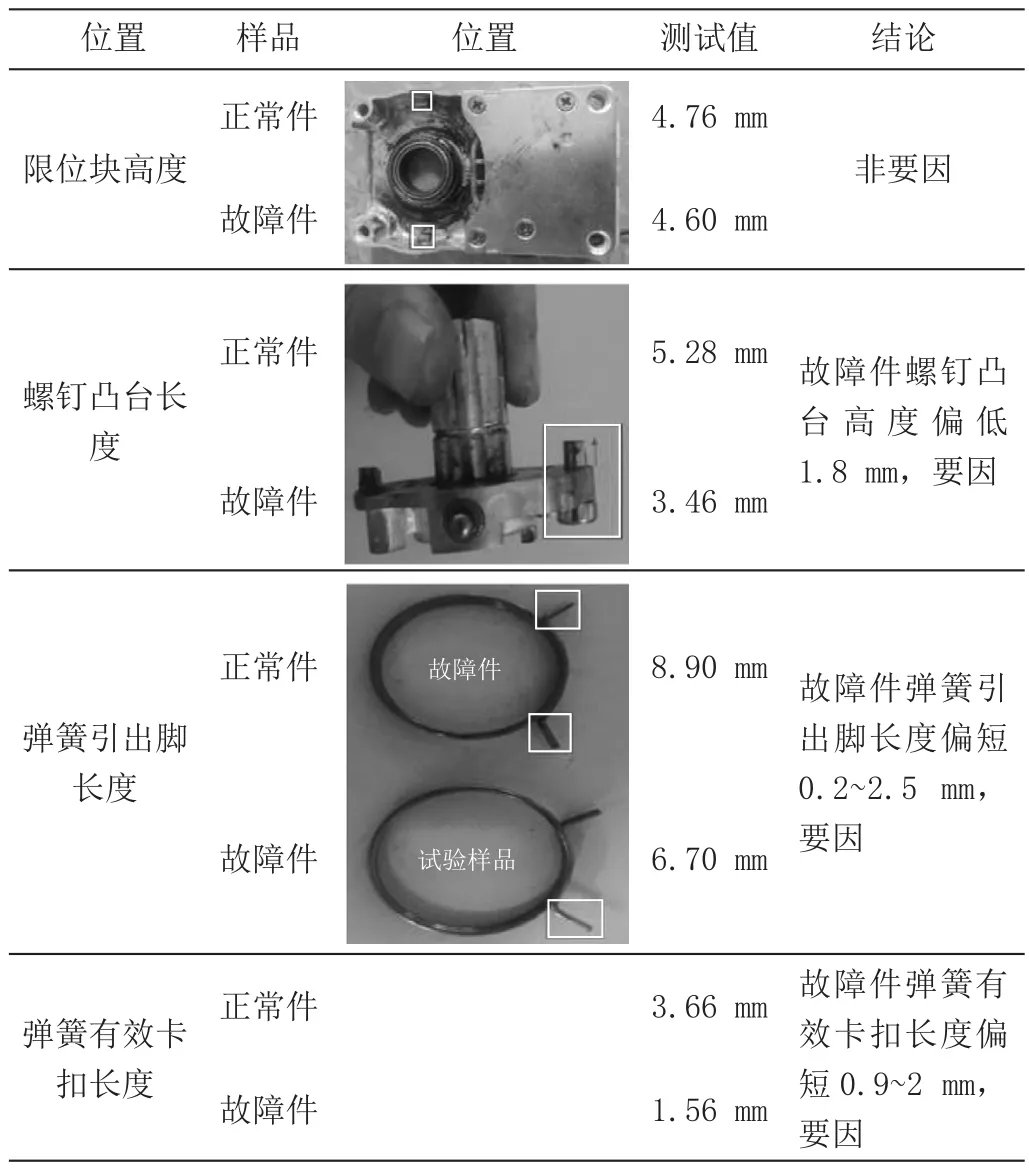
表1 回力彈簧結構尺寸對比數據
通過如表1可看出,回力模塊彈簧腳長度偏短,彈簧與內殼凸臺限位配合有效接觸面較短。且在把手回力模塊轉動過程中會壓縮回力彈簧造成彈簧塑性變形產生,當回力模塊內部彈簧彈出時彈性勢能消失,由于配合間隙過小造成把手回彈力失效,在把手轉動頂住限位時從內測滑出,導致彈簧失效。
2.2 故障再現及整改方案驗證
現場抽取部分庫存把手回力模塊進行可靠性復現試驗,發現部分模塊在轉動把手時彈簧會越過內殼限位塊,彈簧彈出失效,可復現故障。通過失效模式分析和實驗驗證,總結回力模塊失效原因為為回力模塊內彈簧與內殼凸臺限位配合有效接觸面較短,導致在門鎖開關時彈簧脫出而出現門鎖失效情況。對此,為解決該問題初步方案為加大彈簧與限位塊配合尺寸,并通過壽命實驗驗證,最后落地零件標準。
3 預防整改措施及技術研究
結合對故障件的失效分析及原因鎖定,通過頭腦風暴及實驗驗證,確定從產品結構上進行優化,識別關鍵控制點受控設計圖文,研究壽命檢測工裝等方案進行研究整改和預防。
3.1 加長彈簧腳長度,加大彈簧與限位塊配合尺寸
通過實驗驗證分析,增加尺寸控制為彈簧與限位塊距離<0.3 mm(圖4),高度距離>2 mm,并對樣件進行壽命實驗驗證能滿足要求。
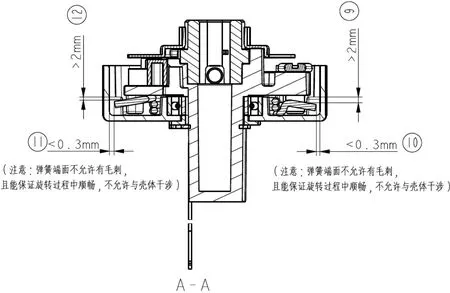
圖4 回力模塊內部解剖圖
3.2 更改回力模塊結構,在模塊兩側開槽,加長彈簧,槽孔對彈簧起到限位作用
對模塊外殼底部進行開孔對扭簧引出端進行限位,代替傳統的利用限位塊對扭簧進行限位,防止扭簧在瞬間彈性勢能的作用下,躍過限位塊導致扭簧彈出模塊失效,有效降低模塊因扭簧彈出而失效的隱患,提高智能門鎖的可靠性。對樣件進行壽命實驗驗證能滿足要求。具體如圖5。
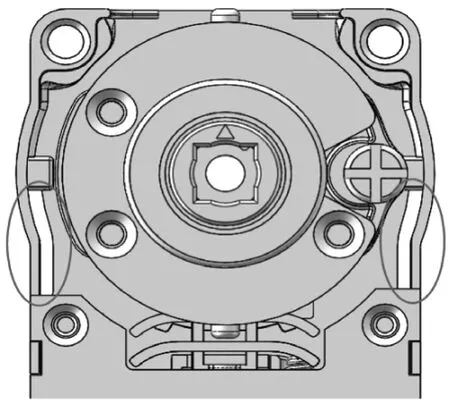
圖5 改善后的回力模塊結構圖
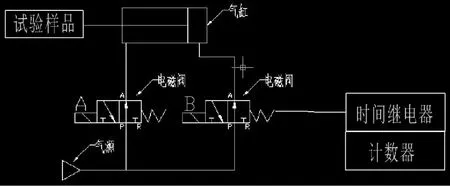
圖6 把手回力模塊結構機械壽命測試裝置原理圖
3.3 回力模塊壽命測試裝置
通過分析,回力模塊的可靠性影響其壽命,而壽命測試周期較長,如果靠人工測試會導致成本和效率的浪費。對此需研究一種回力模塊自動化測試裝備。此工裝通過時間繼電器控制電磁閥的通斷時間,通過電磁閥的通斷控制氣缸來回動作,帶動回力模塊轉動,實現回力模塊機械壽命測試,并裝有計數器。代替人工手動測試操作,起到減人增效功能。
技術要求:將把手回力模塊前傳動軸扭轉至極限位置,反復10 w次,試驗結束后,把手回力模塊應能恢復正常,各部位無變形、磨損等現象,各緊固件無松動、脫落等現象,并監測彈簧扭矩變化值和緊固螺絲退出力矩變化值。
試驗方法:采用自制工裝將把手回力模塊前傳動軸扭轉至極限位置,反復10 w次,試驗結束后,測試其彈簧扭矩值。
4 小結
隨著智能門鎖在國內市場的應用日益廣泛,居家裝修選擇智能門鎖的用戶越來越多,智能門鎖可靠性和安全性至關重要。而回力模塊是控制門鎖開鎖、關門的重要器件之一。本文結合對外把手回力模塊功能失效的故障件進行失效分析和故障復現進一步確定其失效模式;并通過頭腦風暴及實驗驗證,提出加長彈簧與限位塊有效配合距離并識別關鍵控制點受控設計圖文,且研究一種回力模塊新型結構及開發壽命檢測工裝用于測試和預防。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
汽車維護與修理(2016年10期)2016-07-10 08:17:41
