基于超導電動懸浮車輛的動力學模型研究
2022-11-29 02:31:56張曉旭張賽馬衛華李騰飛王自力羅世輝
機械 2022年10期
張曉旭,張賽,馬衛華*,,李騰飛,王自力,羅世輝
基于超導電動懸浮車輛的動力學模型研究
張曉旭1,張賽2,馬衛華*,1,李騰飛1,王自力1,羅世輝1
(1.西南交通大學 牽引動力國家重點實驗室,四川 成都 610031;2.中國中車長春軌道客車股份有限公司,吉林 長春 130000)
相比于電磁懸浮,超導電動懸浮的超導磁體與軌道線圈之間的動態相互作用關系更為復雜,無法采用與電磁懸浮相類似的等效磁軌關系建立動力學模型。針對此問題,本文對超導電動懸浮車輛動力學模型建模方法進行了探究。首先,基于車輛懸浮系統的基本工作原理,利用有限元軟件仿真計算得到不同速度及間隙下的二維磁力矩陣;其次,基于MATLAB組建數據庫,借鑒曲面積分思想和極限理論,利用SIMULINK平臺將離散化的二維磁力矩陣搭建成維關系矩陣,為后續超導電動懸浮車輛磁軌關系提供一定的基礎;最后,基于多體動力學軟件SIMPACK及其SIMAT技術完成SIMPACK與MATLAB的聯合仿真模型。此外,通過對比分析系統固有頻率驗證了動力學模型的正確性,并利用所建立動力學模型分析了時速700公里系統的動力學響應,結果顯示車輛運行各項動力學指標的仿真結果大小均在合理范圍。本文工作可為今后超導電動懸浮列車動力學研究提供一定參考。
超導磁浮;電動懸浮;動力學模型;磁軌關系;維查表法
磁浮列車采用無接觸懸浮的導向與驅動系統,具有速度快、能耗低、噪音低與安全舒適等優點,日漸成為軌道交通行業的研究熱點[1]。在高速與磁浮技術并存的技術類型中,相比于電磁型懸浮技術,電動懸浮技術的磁浮車輛技術更為成熟,優勢也更為明顯。電動懸浮技術又分為永磁電動懸浮與超導電動懸浮;其中永磁電動懸浮技術是利用永磁體與軌道感應板相互作用產生懸浮力,時速可達到500公里,該技術目前仍處于試驗階段[2-3];超導電動懸浮技術是利用超導磁體與軌道線圈間感應產生懸浮力與導向力,日本自20世紀70年代起開展了一系列超導電動懸浮技術研究,相比于永磁電動懸浮技術,超導電動懸浮技術研究更為成熟,且其懸浮間隙可達到100 mm以上,不需要附屬控制單元就可以實現穩定的懸浮和導向[4-6]。因此對于發展高速及超高速軌道交通,超導電動制式懸浮更具優勢。
由于超導電動懸浮列車的優越性能,各國學者開展了相關技術研究,超導電動懸浮基礎理論研究也取得重要進展,美國HE等[7-8]、日本大橋俊介等[9]、意大利CARBONARI N等[10]運用動態電磁理論推導了超導電動懸浮系統的等效電路和電磁力表達式,并提出三維力解析模型;美國Davey K等[11]對超導磁體縱進行縱向諧波近似橫向指數衰減,推導了車輛點頭運動時的懸浮力與導向力;我國目前對于電動懸浮研究處于初級階段,對超導電動懸浮型磁浮列車技術研究較少。萬尚軍等[12]、王志濤等[13]先后運用電磁理論建立動態電路模型分析了超導電動懸浮的基本特性。目前,除了日本學者外鮮有開展超導電動磁浮列車的動力學仿真分析,對于超導電動懸浮列車動力學模型也鮮有涉及[14]。因此開展超導電動懸浮車輛動力學模型研究,充分考慮超導電動懸浮導向系統的非線性,建立準確有效的超導電動懸浮車輛動力學模型,顯得尤為重要。
針對上述問題,本文以某超導電動懸浮的磁浮車輛為研究對象,首先對其磁力特性進行分析,并基于超導電動懸浮工作原理和超導電動懸浮磁力的特性,建立了超導電動懸浮的磁浮系統動力學模型,通過對比分析模型系統的固有頻率對所建立的動力學模型進行驗證,最后利用所建立的模型對超導電動懸浮車輛動力學性能進行分析,為超導磁浮列車的電動懸浮系統動力學研究和懸浮架設計提供理論依據和應用參考。
1 電動懸浮系統結構與工作原理
超導電動懸浮系統如圖1所示,主要包含U型軌道、懸浮架、車體等部件,其中懸浮架由超導磁體、構架、橫梁、空氣彈簧及連接裝置等組成。U型軌道是整個系統的重要組成部件,為一些部件提供安裝基礎,例如其兩側對稱安裝有用于驅動的驅動線圈及用于懸浮導向的“8”字形零磁通軌道線圈。懸浮架是超導電動磁浮車輛車體與軌道連接的重要部件,懸浮架兩側安裝有超導磁體。當列車前進時,車載超導磁體與軌道“8”字形線圈產生相互作用力,其垂直方向產生一個向上的分力用于支撐列車起懸浮作用,水平方向分力用于控制列車左右運動起導向作用。車體是承載的重要部件,其作用是承載乘客及各種設備,同時起到磁屏蔽作用,避免列車乘客受到電磁輻射影響。
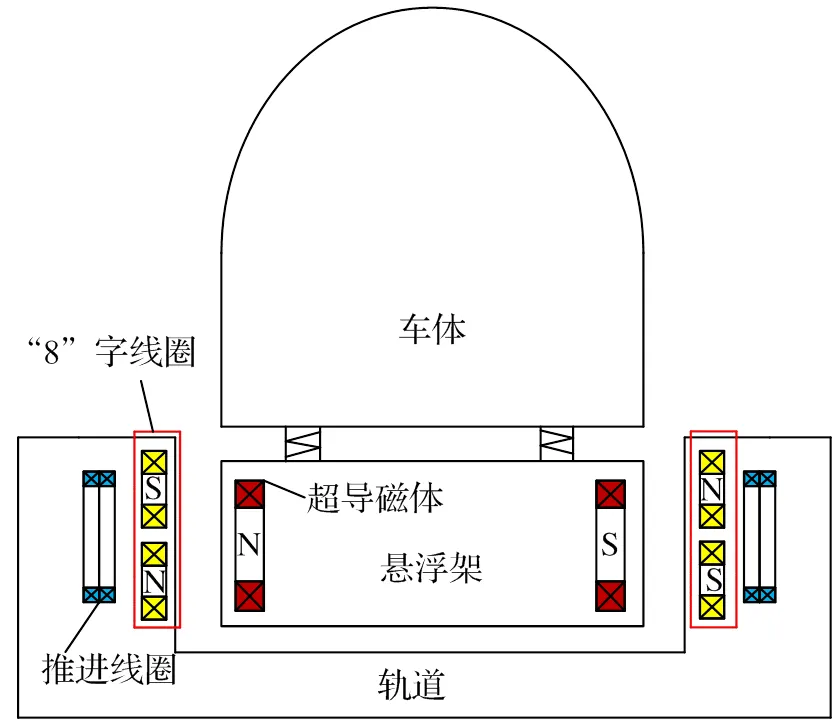
圖1 電動懸浮列車截面圖
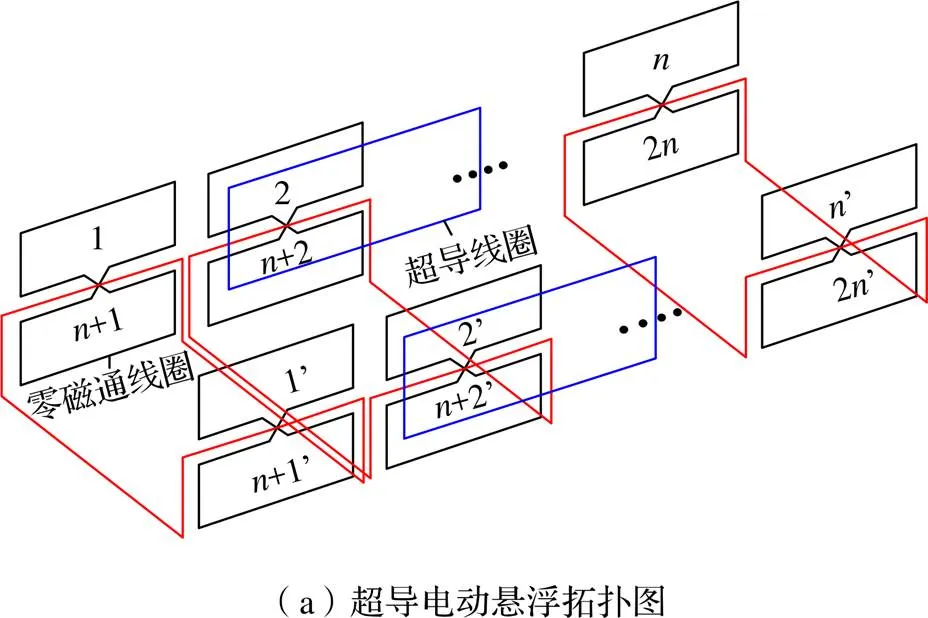
超導電動懸浮原理如圖2所示。圖2(a)為超導電動懸浮拓撲結構,系統由零磁通線圈和超導線圈組成,零磁通線圈通過鉸鏈線連接。圖2(b)為懸浮與導向原理示意圖,車輛前進時帶動超導磁體前進,從而引起“8”字形線圈中磁場的不斷變換產生感應電流。由于線圈上下兩環為交叉環繞,感應出的電流方向相反,當超導體位于中間位置時上下環路內電流大小相同,當超導磁體向下移動時兩環路內感應電流大小不同,從而引起線圈內有電流通過,相互作用產生懸浮力。水平方向上,由于兩側的零磁通線圈通過鉸鏈線連接,當車體偏離軌道中心線時兩側線圈感應電動勢不同,相連的線圈會產生電流,靠近超導磁體的一側會產生斥力,遠離超導磁體的一側產生吸引力,最終合力推動車輛向軌道中心位置靠近。
2 超導電動懸浮磁力特性分析
本文利用有限元軟件,借鑒曲面積分思想和極限理論,將其劃分成微段,每一微段等效線性化,求得微段節點的磁力值,其余位置磁力值采用差值計算,求得同一速度下系統對應位置的磁力,通過計算得到懸浮力、導向力與磁阻力如圖3所示,可以發現,隨著垂向位移的增加,懸浮力與導向力呈逐漸增大趨勢;隨著橫向位移的增加,懸浮力、導向力與磁阻力均不斷增大;此外,懸浮力、導向力與磁阻力隨縱向位置的變化呈周期性正弦變化。
3 動力學模型建模方法研究
對超導電動懸浮車輛磁力特性分析可以發現其力學特性受懸浮間隙、導向間隙、縱向運行速度與縱向相對位置四方面因素影響,具有的非線性,想要建立更為細致的描述列車運行狀態的動力學仿真模型,關鍵是要解決列車建模過程中的超導磁體與軌道線圈間磁力特性的正確表達,從而建立完整的動力學模型,實現超導電動懸浮車輛的動態仿真分析。
3.1 磁軌關系處理
建立超導電動磁浮車輛動力學模型,首要問題是解決磁軌關系,其中電磁型磁浮系統的磁軌關系處理主要分為兩種[15-16]:一種是考慮懸浮控制算法,建立包含控制算法實現車軌相互作用,稱之為懸浮控制法;另一種則是將非線性主動控制力等效簡化為彈簧阻尼力,稱之為彈簧阻尼法。本文所研究的超導電動懸浮系統不包含主動控制,且由第2.3節磁力分析可以發現,超導電動懸浮系統具有很強的非線性,不宜直接線性化處理。因此利用MATLAB組建數據庫,在SIMULINK建立維查表法框圖,創建與SIMPACK接口,從而可實時獲取超導電動懸浮系統的位置與速度,傳遞至SIMULINK利用查表法獲取對應的懸浮力、導向力與磁阻力,從而完成磁軌關系的確立,如圖4所示。
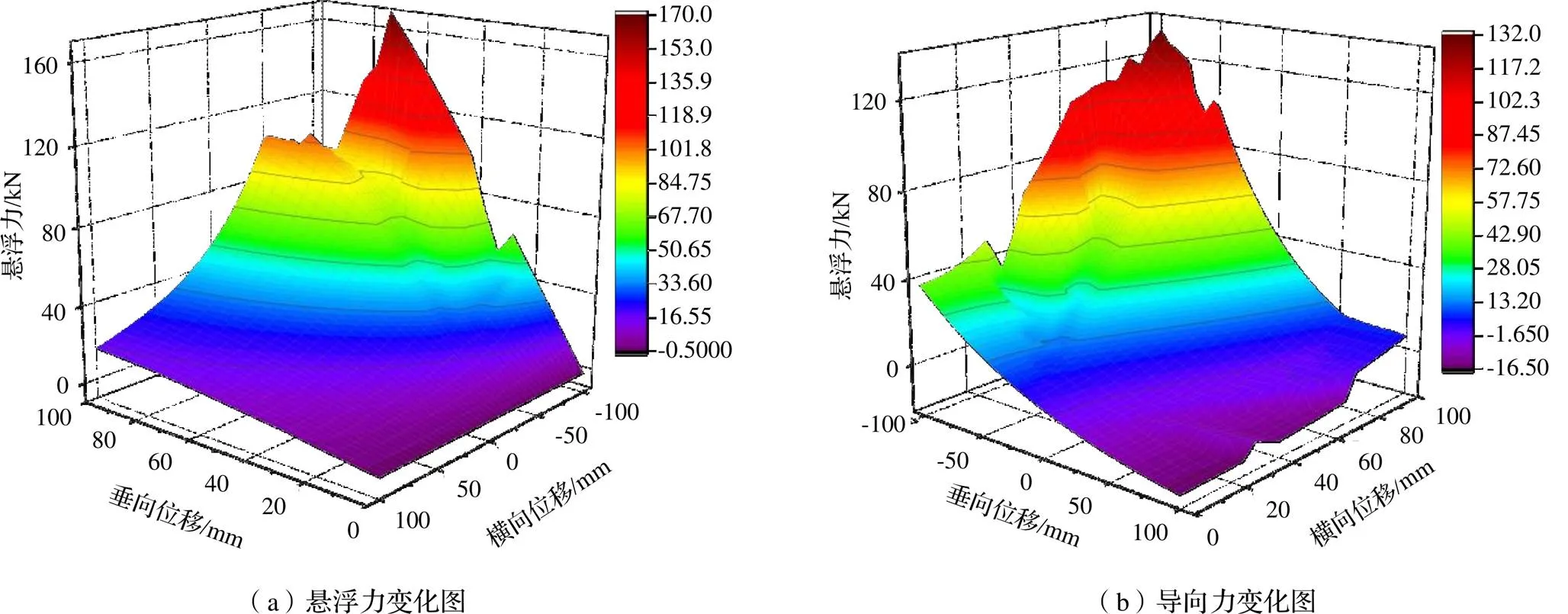
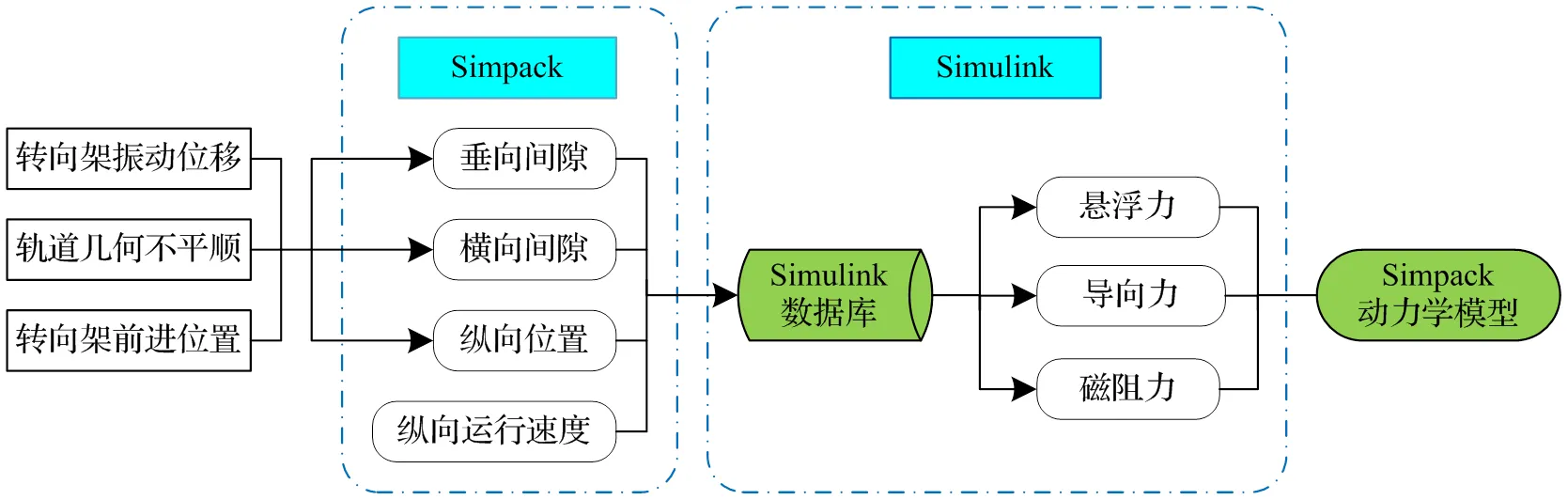
圖4 磁軌關系處理流程圖
維查表法的具體原理如圖5所示,通過Simulink中的n-D Lookup Table模塊計算一個函數的變量采樣表示形式為=(1,2, …, x),其中函數可以是經驗函數。此模塊函數通過查找或插入使用模塊參數定義的值表,將輸入映射到輸出值。在查表法中,第一個輸入標識第一個維度(行)斷點,第二個輸入標識第二個維度(列)斷點,依此列推。
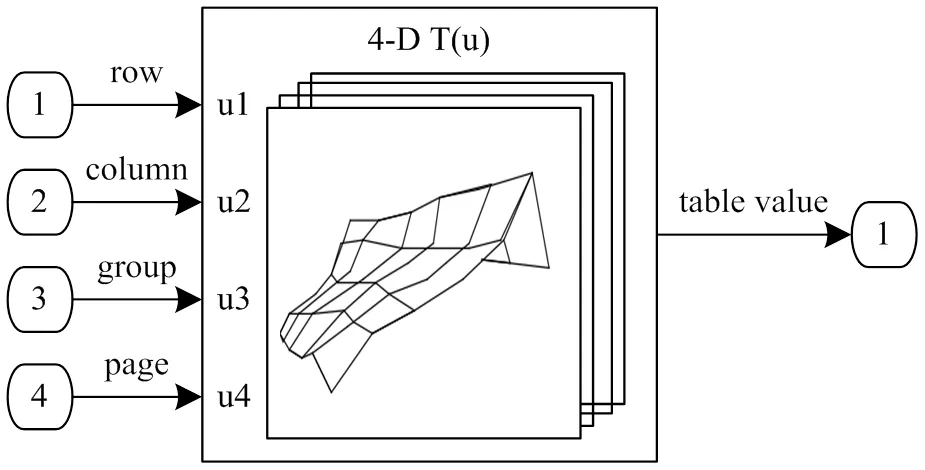
圖5 n維查表法示意圖
3.2 動力學模型建模
本文以SIMPACK為例介紹超導電動磁浮系統的動力學建模方法。首先確定研究對象,本文研究對象為超導電動磁浮車輛,懸浮系統的基本結構主要由超導磁體、構架、橫梁、一系懸掛裝置、二系懸掛裝置、牽引拉桿等組成。超導磁體與U型軌道推進線圈通過直線電機作用產生縱向牽引力傳遞至構架,再通過牽引拉桿牽引車體前進;橫向力由于構架與超導磁體之間的一系懸掛裝置,所以由超導磁體產生的橫向力經過一系裝置傳遞至構架,再通過二系懸掛裝置傳遞至車體;在車輛完全起浮后,超導磁體與軌道線圈之間產生的垂向力由超導磁體傳遞至構架,再經由二系空氣彈簧裝置傳遞至車體。根據超導電動懸浮列車結構組成與力的傳遞過程,利用SIMPACK建立列車動力學仿真模型如圖6所示,主要參數如表1所示。
4 模型驗證與仿真分析
采用建立的磁浮車輛動力學模型,施加如圖7所示的地面垂向不平順樣本,開展超導磁浮車輛動力學仿真分析計算。首先進行動力學模型驗證,然后計算車輛以速度700 km/h直線運行時的垂向和橫向動力學響應。
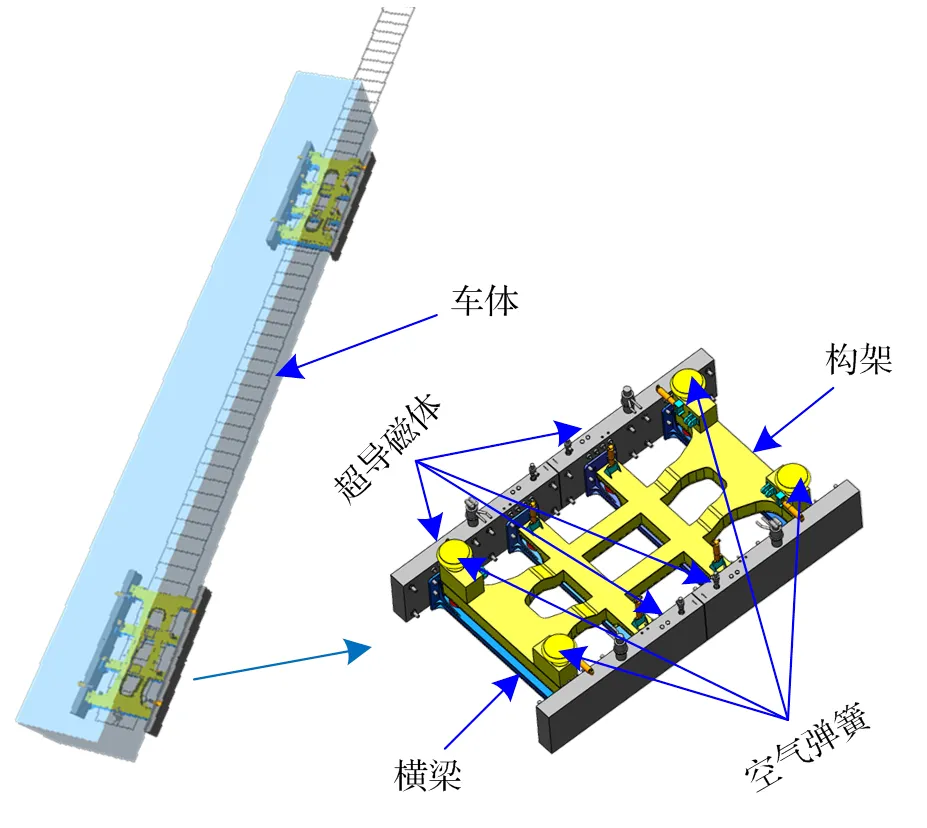
圖6 動力學模型示意圖
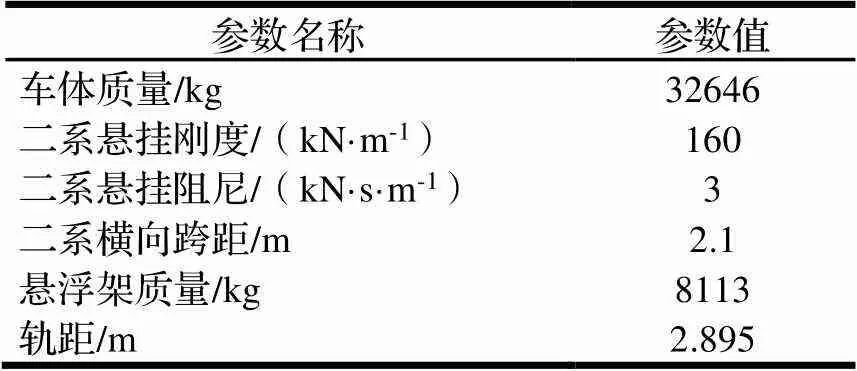
表1 動力學主要建模參數
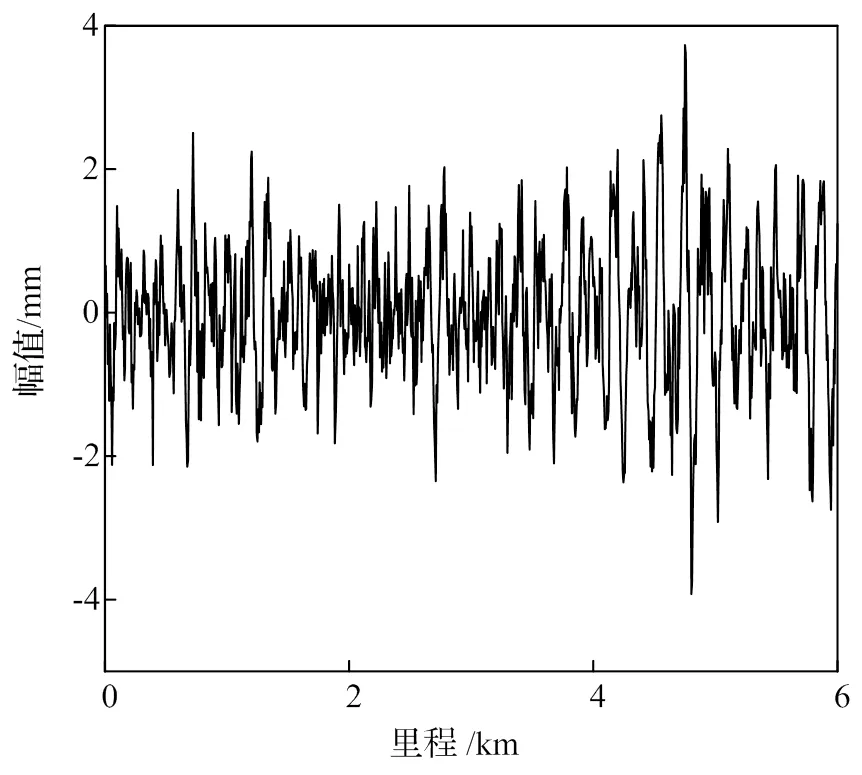
圖7 軌道垂向不平順變化圖
4.1 模型驗證
首先對超導電動懸浮系統結構進行簡化,得到超導電動懸浮系統的垂向振動力學模型如圖8所示,系統參數說明如表2所示。

表2 系統主要參數
車體的浮沉方程為:

懸浮架的浮沉方程為:

單獨計算車體浮沉自振頻率時,可將懸浮架認為是靜止的;同理單獨計算懸浮架浮沉自振頻率時也認為車體是靜止的。不考慮各剛體運動的耦合作用以及懸掛系統的阻尼[17],則車體與懸浮架的浮沉方程可簡化為:

車體與懸浮架的浮沉頻率計算公式為:
將表2中數據代入得到,系統中車體的浮沉固有頻率為0.98 Hz,懸浮架的浮沉固有頻率為4.81 Hz。同時利用所建立動力學模型進行分析,當超導電動懸浮車輛以700 km/h速度直線運行時車體垂向加速度響應時程曲線如圖9(a)所示,可見,當采用非線性電動懸浮系統時車輛垂向振動加速度響應最大值為1.16 m/s2,且其響應波形與不平順變化趨勢基本一致。此外由圖9可見,車體垂向加速度主頻為0.99 Hz,與車輛的浮沉固有頻率接近,同時懸浮架浮沉固有頻率4.83 Hz在頻譜中也有顯示,說明仿真模型的建立是正確可行的。
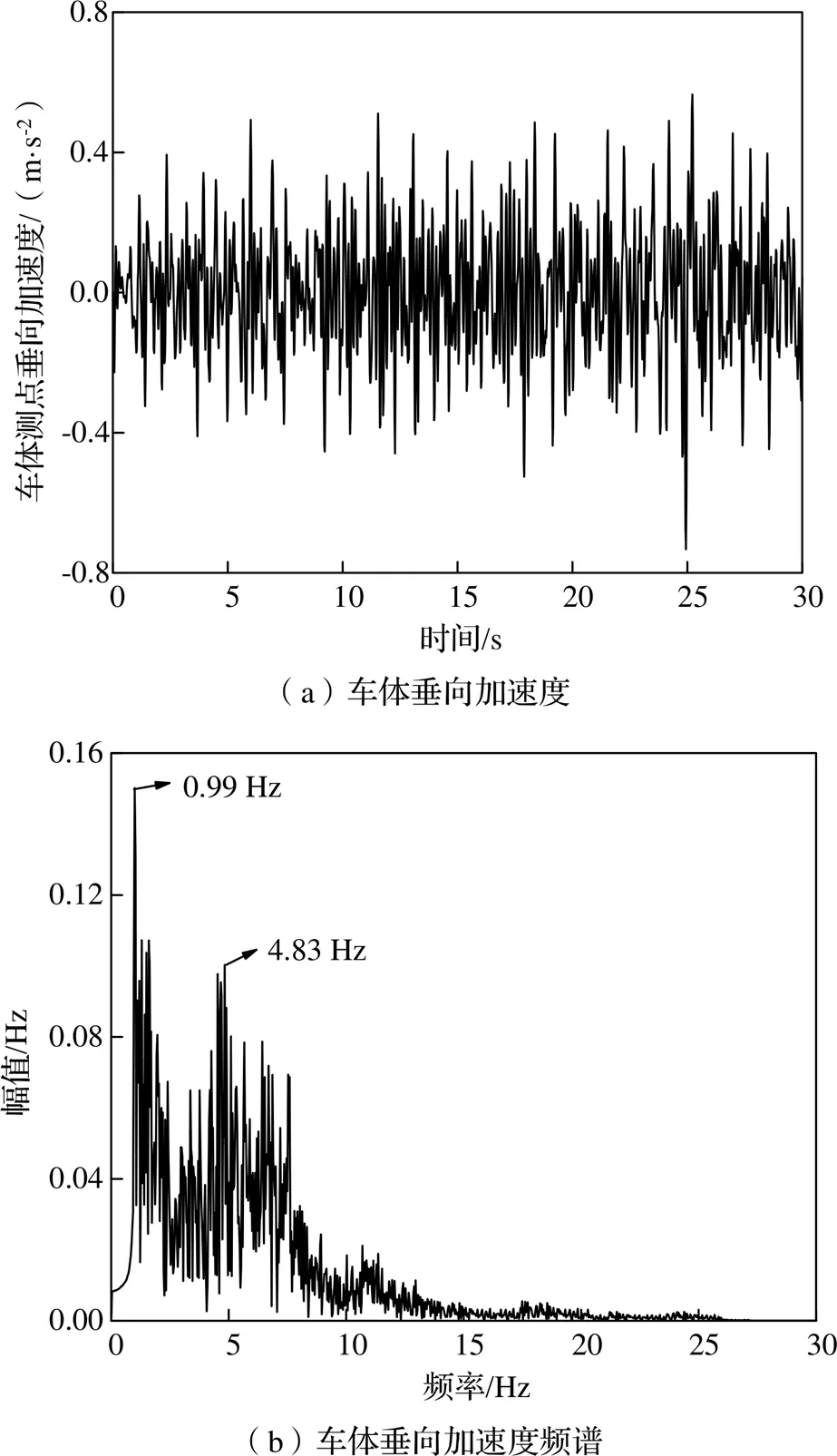
圖9 車體垂向運動特性分析
4.2 仿真分析
根據所驗證的動力學模型,研究超導電動懸浮車輛的動態響應特性,驗證超導磁浮車輛系統的穩定性,重點分析了車輛Sperling平穩性指標值、懸浮間隙最大值、空氣彈簧垂向力和垂向位移。
超導磁浮列車以速度700 km/h運行時,垂向Sperling指標值為2.45,橫向Sperling指標值為2.25。其余各項動態指標如圖10、圖11所示:空簧垂向力主要在40 kN左右變化,最大值40.84 kN;空簧垂向位移主要在0.8 mm左右變化,變化值最大1.55 mm;懸浮力主要在32.5 kN左右變化,最大值34.24 kN;懸浮間隙變化值主要在1 mm左右,最大值2.49 mm,各項指標均在合理范圍內。通過動力學分析進一步驗證了仿真模型的正確性,同時表明超導電動懸浮車輛運行平穩性符合要求。
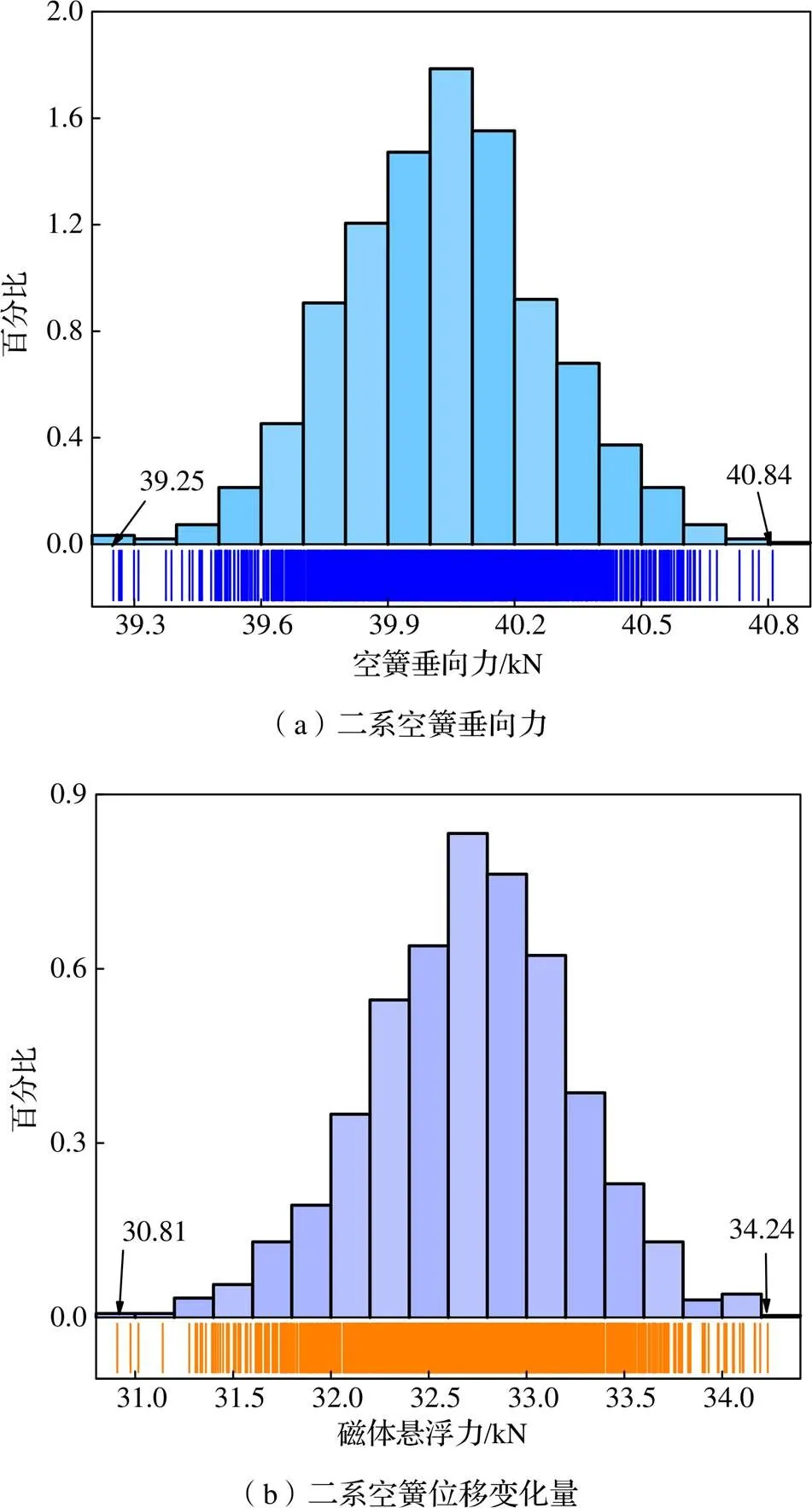
圖10 二系空簧垂向特性
5 結論
本文以超導電動懸浮車輛為研究對象,對其動力學模型進行探究,得到如下結論:
(1)電動懸浮系統磁軌關系可采用維查表法,基于MATLAB組建數據庫和SIMULINK平臺,將離散化后的磁力、速度和間隙的關系曲線搭建成維查表法框圖,然后利用SIMAT技術與多體動力學軟件SIMPACK建立接口,解決超導電動懸浮車輛磁軌關系;
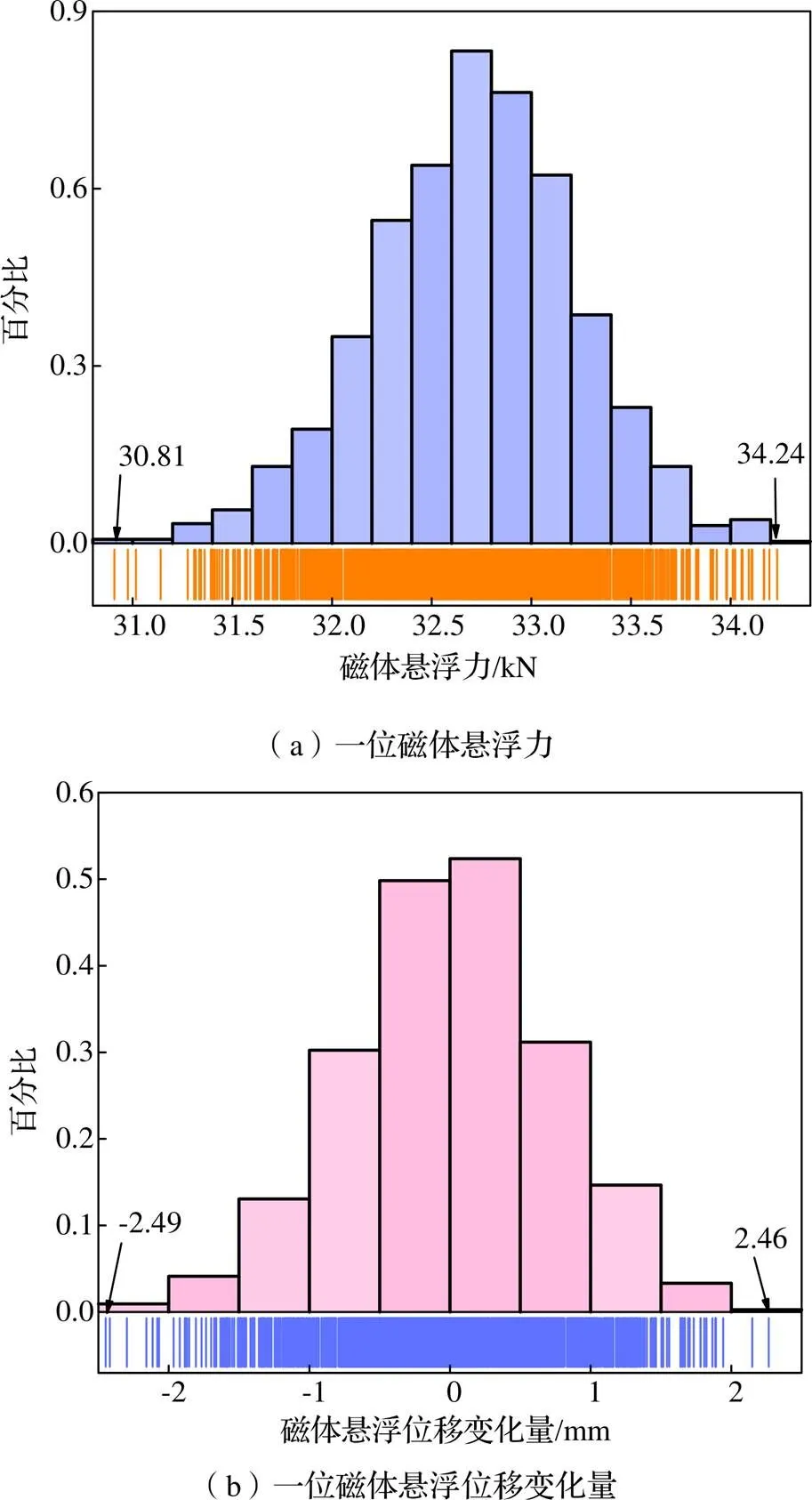
圖11 一位磁體懸浮特性
(2)通過對比動力學模型計算和理論推導下車輛車體與懸浮架的固有頻率數值,驗證了永磁電動懸浮磁軌關系和動力學模型的正確性,為后續動力學分析提供一定的基礎;
(3)超導電動懸浮車輛以速度700 km/h運行時,其運行平穩性及各項動力學指標均符合標準要求,進一步驗證了模型建立的正確性。
[1]徐飛,羅世輝,鄧自剛. 磁懸浮軌道交通關鍵技術及全速度域應用研究[J]. 鐵道學報,2019,41(3):40-49.
[2]熊嘉陽,鄧自剛. 高速磁懸浮軌道交通研究進展[J]. 交通運輸工程學報,2021,21(1):177-198.
[3]過振宇,楊杰. 永磁懸浮軌道側向力控制系統的DMC-PID控制策略[J]. 鐵道科學與工程學報,2021,18(6):1371-1381.
[4]馬光同,楊文姣,王志濤,等. 超導磁浮交通研究進展[J]. 華南理工大學學報(自然科學版),2019,47(7):68-74,82.
[5]張娟,趙春發,馮洋,等. 超導磁浮列車電動懸浮導向力學特性研究[J]. 機械,2020,47(9): 25-32.
[6]Kyotani Y. Recent progress by JNR on Maglev[J]. IEEE Transactions on Magnetics,1988,24(2):804-807.
[7]He J L,Rote D M,Coffey H T. Applications of the dynamic circuit theory to Maglev suspension systems[J]. IEEE Transactions on Magnetics,1993,29(6):4153-4164.
[8]He J,Coffey H. Magnetic damping forces in figure-eight-shaped null-flux coil suspension systems[J]. IEEE Transactions on Magnetics,2002,33(5):4230-4232.
[9]Carbonari N,Martinelli G,Morini A. Calculation of levitation,drag and lateral forces in EDS-MAGLEV transport systems[J]. Archivfür Elektrotechnik,1988,71(2):139-148.
[10]Ohashi S. Weight Reduction of the Damper Coils in the Superconducting Magnetically Levitated Bogie[J]. IEEE Transactions on Magnetics,2018(11):1.
[11]Davey K,Morris T. Calculation of motion induced eddy current forces in null flux coils[J]. IEEE Transactions on Magnetics,1995,31(6):4214-4216.
[12]萬尚軍,錢金根,倪光正,等. 電動懸浮型磁懸浮列車懸浮與導向技術剖析[J]. 中國電機工程學報,2000,20(9):23-26,32.
[13]王志濤,蔡堯,龔天勇,等. 基于場-路-運動耦合模型的超導電動懸浮列車特性研究[J]. 中國電機工程學報,2019,39(4):1162-1171.
[14]張娟. 超導電動懸浮磁力特性及超導磁浮車輛動力學仿真分析[D]. 成都:西南交通大學,2020.
[15]Rote D M,Cai Y. Review of dynamic stability of repulsive-force maglev suspension systems[J]. IEEE Transactions on Magnetics,2002,38(2):1383-1390.
[16]梁鑫,馬衛華. 2種磁軌關系的磁浮車橋相互作用比較分析[J]. 鐵道科學與工程學報,2017,14(4):845-851.
[17]曾京,鄔平波,郝建華. 鐵道客車系統的垂向減振分析[J]. 中國鐵道科學,2006,27(3):62-67.
Dynamic Model of Superconducting Electric Levitation Vehicle
ZHANG Xiaoxu1,ZHANG Sai2,MA Weihua1,LI Tengfei1,WANG Zili1,LUO Shihui1
(1.State Key Laboratory of Traction Power, Southwest Jiaotong University,Chengdu 610031,China; 2.CRRC Changchun Railway Vehicles Co.,Ltd., Changchun 130000, China)
Compared with the Electromagnetic Suspension Maglev, the dynamic interaction relationship between the superconducting magnet and the orbital coil of the superconducting electric levitation is more complicated, and the dynamic model cannot be established by using the equivalent magnetic orbit relationship similar to the Electromagnetic Suspension Maglev. Aiming at solving this problem, this paper explores the modeling method of dynamic model of superconducting electric levitation vehicle. Firstly, based on the basic working principle of the vehicle suspension system, the finite element software is used to simulate and calculate the two-dimensional magnetic matrix under different speeds and gaps. Secondly, a database is established based on MATLAB, and the surface integration idea and limit theory are used for reference. The two-dimensional magnetic force matrix is built into an n-dimensional relationship matrix, which provides a certain basis for the magnetic track relationship of the subsequent superconducting electric levitation vehicle. Finally, the co-simulation model of SIMPACK and MATLAB is completed based on the multi-body dynamics software SIMPACK and its SIMAT technology. In addition, the correctness of the dynamic model is verified by comparing and analyzing the natural frequency of the system, and the dynamic response of the system at a speed of 700 kilometers per hour is analyzed by using the established dynamic model. The simulation results of various dynamic indicators of vehicle operation are all within a reasonable range. The research provides reference for future study on dynamics of superconducting electric levitation vehicle.
superconducting maglev;electric levitation;dynamic model;magnetic orbit relationship;n-d look-up table method
U237
A
10.3969/j.issn.1006-0316.2022.10.006
1006-0316 (2022) 10-0035-08
2022-02-25
國家自然科學基金面上項目(51875483);牽引動力國家重點實驗室自主研究課題(2020TPL_T04)
張曉旭(1996-),女,河北石家莊人,碩士研究生,主要研究方向為列車系統動力學,E-mail:zhangxiaoxu1225@163.com。
馬衛華(1979-),男,山東滕州人,博士,研究員,主要研究方向為機車及重載列車動力學、磁浮列車懸浮架設計及列車動力學,E-mail:mwh@swjtu.edu.cn。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19