基于MPI并行計(jì)算的衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
2022-12-01 01:06:10葉應(yīng)輝
計(jì)算機(jī)測(cè)量與控制 2022年11期
關(guān)鍵詞:系統(tǒng)
葉應(yīng)輝
(吉林大學(xué) 地球探測(cè)科學(xué)與技術(shù)學(xué)院,長(zhǎng)春 130026)
0 引言
遙感衛(wèi)星是指可對(duì)外層空間進(jìn)行監(jiān)控的人造衛(wèi)星設(shè)備,常以遙感平臺(tái)作為基礎(chǔ)應(yīng)用結(jié)構(gòu)。一般情況下,一顆穩(wěn)定的遙感衛(wèi)星可在同一軌道上運(yùn)行數(shù)年。對(duì)于地球遙感衛(wèi)星來說,其在規(guī)定時(shí)間內(nèi)能夠完全覆蓋地球表面的任意指定區(qū)域,在衛(wèi)星設(shè)備沿地球同步軌道運(yùn)行時(shí),其對(duì)于指定地域的遙感探測(cè)行為也可以保持連續(xù)狀態(tài)[1]。在衛(wèi)星遙感任務(wù)中,所得數(shù)據(jù)變化指征與非變化指征之間始終存在一定的數(shù)值誤差,且這種誤差的實(shí)際取值越大,衛(wèi)星主機(jī)對(duì)于遙感數(shù)據(jù)傳輸變化行為的監(jiān)測(cè)準(zhǔn)確性也就越低。
為避免上述情況的發(fā)生,相關(guān)領(lǐng)域?qū)W者針對(duì)衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)進(jìn)行研究,毋琳[2]等設(shè)計(jì)了河流徑流雷達(dá)衛(wèi)星遙感監(jiān)測(cè)系統(tǒng)。該系統(tǒng)以雷達(dá)高度計(jì)和SAR遙感技術(shù)為基礎(chǔ),對(duì)河流寬度、水位和徑流進(jìn)行了計(jì)算,實(shí)現(xiàn)了參數(shù)計(jì)算功能。該系統(tǒng)的推廣和應(yīng)用,可以為河道徑流雷達(dá)衛(wèi)星遙感的實(shí)時(shí)監(jiān)控提供技術(shù)支持。但系統(tǒng)對(duì)于指征參量的實(shí)際控制能力有限,并不能完全滿足準(zhǔn)確監(jiān)測(cè)衛(wèi)星遙感數(shù)據(jù)傳輸變化行為的實(shí)際應(yīng)用需求。尤淑撐[3]等設(shè)計(jì)了自然資源衛(wèi)星遙感常態(tài)化監(jiān)測(cè)框架。通過對(duì)一系列關(guān)鍵技術(shù)的突破,包括衛(wèi)星遙感的常規(guī)監(jiān)測(cè),對(duì)全國的全要素進(jìn)行了定期的季度監(jiān)測(cè),重點(diǎn)地區(qū)的高頻率、高精度的實(shí)時(shí)監(jiān)控,以及“量-質(zhì)-生態(tài)”的實(shí)時(shí)監(jiān)控,服務(wù)于自然資源普查、監(jiān)督等方面,建立全方位、多層次的衛(wèi)星遙感監(jiān)測(cè)系統(tǒng)。該系統(tǒng)能夠加強(qiáng)對(duì)自然資源衛(wèi)星遙感數(shù)據(jù)的支撐、常規(guī)監(jiān)測(cè)、信息服務(wù)、決策支持等方面的綜合應(yīng)用。但該系統(tǒng)的監(jiān)測(cè)準(zhǔn)確性較低。
MPI是一種可進(jìn)行跨語言傳輸?shù)耐ㄓ嵾B接協(xié)議,常用于編寫并行代碼指令,同時(shí)支持點(diǎn)對(duì)點(diǎn)、面對(duì)面等多種協(xié)議連接形式[4]。從作用機(jī)制的角度來看,MPI連接協(xié)議同時(shí)具有可移植性、大規(guī)模性、高性能性等多重作用能力,故而在數(shù)據(jù)處理、互聯(lián)網(wǎng)部署等多個(gè)領(lǐng)域中都具有極強(qiáng)的執(zhí)行能力[5]。因此,為解決上述問題,設(shè)計(jì)基于MPI并行計(jì)算的衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)。通過與Zigbee網(wǎng)絡(luò)的節(jié)點(diǎn)進(jìn)行A/D變換電路的匹配,根據(jù)需要傳感器和協(xié)調(diào)器設(shè)備分配衛(wèi)星遙感數(shù)據(jù),完成系統(tǒng)的硬件設(shè)計(jì)。將MPI的基本調(diào)用與數(shù)據(jù)進(jìn)程編寫原則結(jié)合起來,以此完善MPI并行計(jì)算。在此基礎(chǔ)上,利用傳感器的幾何校正原理,計(jì)算出遙感數(shù)據(jù)的度量值,并對(duì)其核函數(shù)進(jìn)行配置,從而實(shí)現(xiàn)了對(duì)衛(wèi)星遙感數(shù)據(jù)的處理,完成衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)設(shè)計(jì)。由此減小衛(wèi)星遙感數(shù)據(jù)變化指征與非變化指征之間的實(shí)值誤差,準(zhǔn)確監(jiān)測(cè)衛(wèi)星遙感數(shù)據(jù)傳輸變化行為。
1 數(shù)據(jù)采集與監(jiān)測(cè)終端硬件設(shè)計(jì)
基于MPI并行計(jì)算的衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)流程,將A/D變換電路與Zigbee網(wǎng)絡(luò)節(jié)點(diǎn)進(jìn)行匹配,利用傳感器模塊和協(xié)調(diào)器設(shè)備,分配衛(wèi)星遙感數(shù)據(jù)。設(shè)計(jì)并行拓?fù)浣Y(jié)構(gòu),結(jié)合MPI調(diào)用與數(shù)據(jù)進(jìn)程編寫原則,完善MPI并行計(jì)算。利用傳感器幾何校正原理,計(jì)算遙感數(shù)據(jù)度量值,并核函數(shù)進(jìn)行配置,完成衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)設(shè)計(jì)。整體監(jiān)測(cè)系統(tǒng)架構(gòu)如圖1所示。
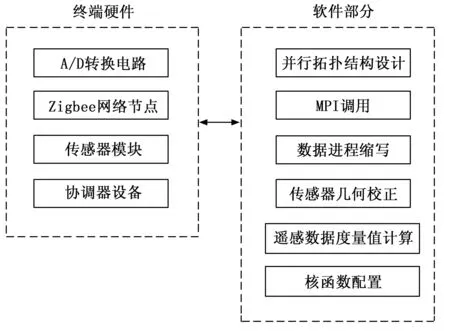
圖1 整體監(jiān)測(cè)系統(tǒng)架構(gòu)
衛(wèi)星遙感數(shù)據(jù)采集與監(jiān)測(cè)終端的硬件執(zhí)行環(huán)境,由A/D轉(zhuǎn)換電路、Zigbee網(wǎng)絡(luò)節(jié)點(diǎn)、傳感器模塊、協(xié)調(diào)器設(shè)備四部分共同組成,具體設(shè)計(jì)方法如下。
1.1 A/D轉(zhuǎn)換電路
A/D轉(zhuǎn)換電路負(fù)責(zé)為衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)提供數(shù)字電量傳輸信號(hào),可以在正負(fù)極端口節(jié)點(diǎn)之間,實(shí)現(xiàn)對(duì)電信號(hào)參量的按需調(diào)節(jié),從而將正向點(diǎn)電荷、負(fù)向點(diǎn)電荷反饋至既定電量消耗設(shè)備之中。為維持A/D轉(zhuǎn)換電路的實(shí)時(shí)連接能力,正極端口節(jié)點(diǎn)與衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)的高壓輸入端相連,負(fù)極端口節(jié)點(diǎn)與低壓輸出端相連,隨著電信號(hào)輸入量的增大,兩個(gè)端口呈現(xiàn)出交替閉合的連接狀態(tài),直至完成對(duì)剩余電量信號(hào)的按需轉(zhuǎn)存與處理[6]。CD4051芯片、TLPS21-2芯片作為A/D轉(zhuǎn)換電路中的核心應(yīng)用結(jié)構(gòu),前者負(fù)責(zé)記錄點(diǎn)電荷的實(shí)時(shí)傳輸總量,后者負(fù)責(zé)感知衛(wèi)星遙感數(shù)據(jù)的定向傳輸行為,在外部負(fù)載電壓數(shù)值不發(fā)生改變的情況下,點(diǎn)電荷與衛(wèi)星遙感數(shù)據(jù)相互交換,并可以借助多個(gè)連接電阻,實(shí)現(xiàn)對(duì)電量信號(hào)傳輸行為的按需調(diào)控。A/D轉(zhuǎn)換電路的結(jié)構(gòu)如圖2所示。
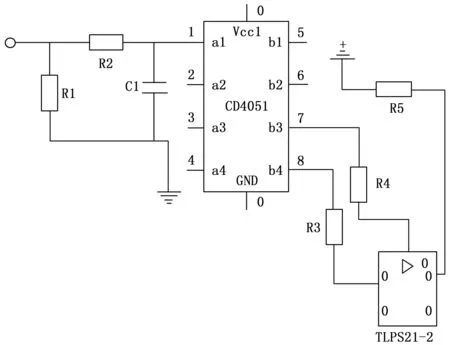
圖2 A/D轉(zhuǎn)換電路的結(jié)構(gòu)示意圖
在A/D轉(zhuǎn)換電路中,處于不同連接位置處R電阻所承擔(dān)的電量信號(hào)處理行為也有所不同。
1.2 Zigbee網(wǎng)絡(luò)節(jié)點(diǎn)
在衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)中,Zigbee網(wǎng)絡(luò)節(jié)點(diǎn)負(fù)責(zé)協(xié)調(diào)A/D轉(zhuǎn)換電路與傳感器模塊及協(xié)調(diào)器設(shè)備間的實(shí)時(shí)連接關(guān)系,可以根據(jù)射頻信號(hào)的輸入形式,規(guī)劃衛(wèi)星遙感數(shù)據(jù)的后續(xù)傳輸行為,從而使得主控器元件能夠準(zhǔn)確感知網(wǎng)絡(luò)節(jié)點(diǎn)與監(jiān)測(cè)主機(jī)之間的遙感數(shù)據(jù)傳輸情況[7]。CC2530控制器作為Zigbee核心控制單元中的主控器元件,能夠與A/D轉(zhuǎn)換設(shè)備、I/O負(fù)載結(jié)構(gòu)建立實(shí)時(shí)連接關(guān)系,隨著Zigbee射頻元件中衛(wèi)星遙感數(shù)據(jù)輸出量的不斷增大,主控單元與下級(jí)設(shè)備之間的連接關(guān)系也在逐漸趨于緊密,這也是系統(tǒng)監(jiān)測(cè)主機(jī)能夠?qū)崟r(shí)準(zhǔn)確掌握衛(wèi)星遙感數(shù)據(jù)傳輸變化行為的主要原因[8]。完整的Zigbee網(wǎng)絡(luò)節(jié)點(diǎn)布置形式如圖3所示。
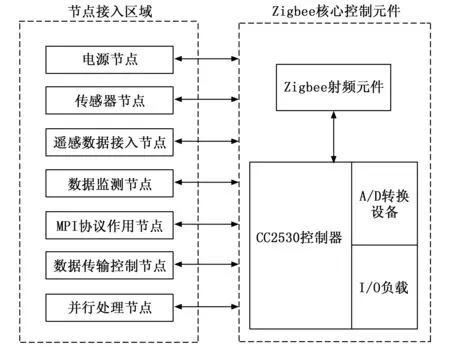
圖3 Zigbee 網(wǎng)絡(luò)節(jié)點(diǎn)布置形式
節(jié)點(diǎn)接入?yún)^(qū)域位于Zigbee核心控制元件旁側(cè),由電源節(jié)點(diǎn)、傳感器節(jié)點(diǎn)、遙感數(shù)據(jù)接入節(jié)點(diǎn)、數(shù)據(jù)監(jiān)測(cè)節(jié)點(diǎn)、MPI協(xié)議作用節(jié)點(diǎn)等多個(gè)端口機(jī)制共同組成。當(dāng)Zigbee核心控制元件進(jìn)入完全閉合狀態(tài)后,所有網(wǎng)絡(luò)節(jié)點(diǎn)在同一時(shí)間呈現(xiàn)定向連接行為,此時(shí)衛(wèi)星遙感數(shù)據(jù)經(jīng)由傳輸網(wǎng)絡(luò)進(jìn)入CC2530控制器,并可以在A/D轉(zhuǎn)換設(shè)備、I/O負(fù)載結(jié)構(gòu)的作用下,將這些數(shù)據(jù)信息參量反饋給系統(tǒng)核心監(jiān)測(cè)主機(jī)。
1.3 傳感器模塊
衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)的傳感器模塊由衛(wèi)星遙感數(shù)據(jù)采集、數(shù)據(jù)變化行為感知、電量控制、MPI協(xié)議作用、數(shù)據(jù)并行運(yùn)算5個(gè)單元共同組成,其組成形式及具體作用能力如表1所示。
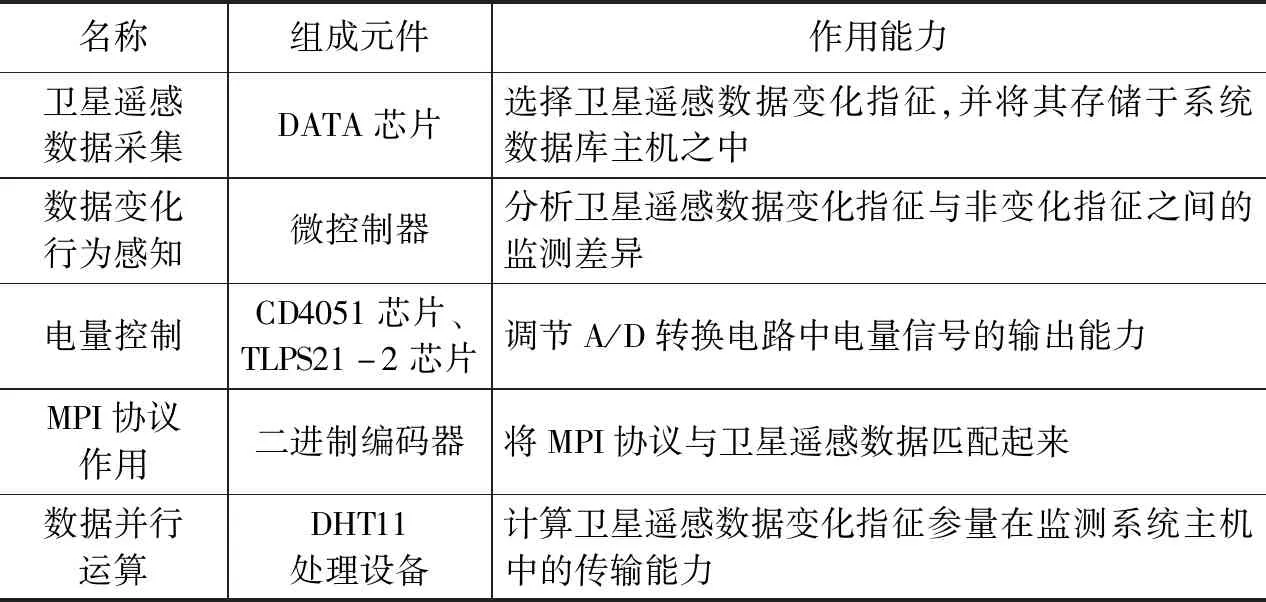
表1 傳感器模塊組成
為使傳感器模塊的執(zhí)行能力能夠匹配衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)的實(shí)時(shí)運(yùn)行狀態(tài),DATA芯片、微控制器元件、CD4051芯片、TLPS21-2芯片、二進(jìn)制編碼器、DHT11處理設(shè)備之間的實(shí)時(shí)連接關(guān)系不會(huì)受到其他系統(tǒng)應(yīng)用結(jié)構(gòu)的影響[9-10]。作為A/D轉(zhuǎn)換電路與Zigbee網(wǎng)絡(luò)節(jié)點(diǎn)的下級(jí)附屬結(jié)構(gòu),傳感器模塊也具備調(diào)度系統(tǒng)協(xié)調(diào)器設(shè)備的處理能力。
1.4 協(xié)調(diào)器設(shè)備
協(xié)調(diào)器設(shè)備以微控制器、DM9000協(xié)調(diào)芯片作為核心調(diào)控裝置,可以聯(lián)合MT8389、RJ45、SDRAN、SPI等多個(gè)通信接口,判斷監(jiān)測(cè)主機(jī)對(duì)于衛(wèi)星遙感數(shù)據(jù)變化行為的感知能力[11]。微控制器裝置分別與PL2303接口、JTAG接口、MT8389接口、SDRAN接口相連,負(fù)責(zé)確定衛(wèi)星遙感數(shù)據(jù)的實(shí)時(shí)傳輸位置,其作用能力會(huì)隨著衛(wèi)星遙感數(shù)據(jù)輸入量的增大而不斷增強(qiáng),當(dāng)數(shù)據(jù)信息累積量達(dá)到微控制器元件的上限承載條件之后,4個(gè)通信接口同時(shí)進(jìn)入開啟狀態(tài),并可將暫存的衛(wèi)星遙感數(shù)據(jù)傳輸回系統(tǒng)監(jiān)測(cè)主機(jī)。DM9000協(xié)調(diào)芯片與RJ45接口、串行外設(shè)接口(serial peripheral interface,SPI)接口相連,能夠預(yù)判衛(wèi)星遙感數(shù)據(jù)的后續(xù)傳輸行為,并可以判定當(dāng)前運(yùn)行指令是否滿足提取數(shù)據(jù)變化指征的應(yīng)用需求[12]。完整的協(xié)調(diào)器設(shè)備連接結(jié)構(gòu)如圖4所示。
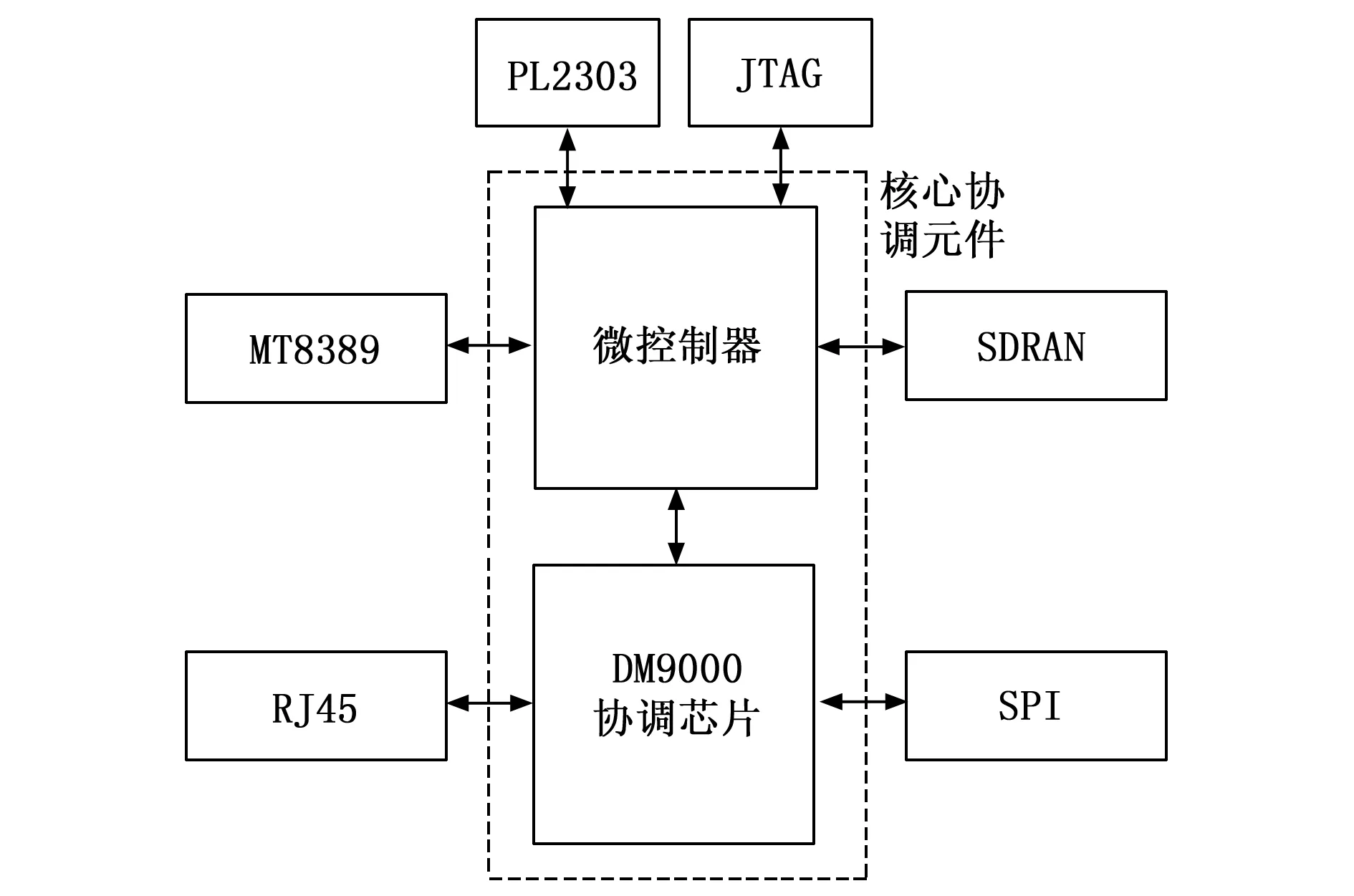
圖4 協(xié)調(diào)器設(shè)備連接結(jié)構(gòu)
對(duì)于協(xié)調(diào)器設(shè)備而言,微控制器元件與DM9000協(xié)調(diào)芯片之間存在一種不可逆的映射連接關(guān)系,且只有當(dāng)PL2303接口、聯(lián)合測(cè)試工作組(joint test action group,JTAG)接口、MT8389接口、同步動(dòng)態(tài)隨機(jī)存儲(chǔ)器(synchronous dynamic random access memory,SDRAN)接口、RJ45接口、SPI接口同時(shí)處于開啟狀態(tài)時(shí),協(xié)調(diào)器設(shè)備對(duì)于衛(wèi)星遙感數(shù)據(jù)傳輸變化行為的感知能力才能夠達(dá)到最強(qiáng)。
2 MPI并行計(jì)算
MPI并行計(jì)算作為衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)的約束標(biāo)準(zhǔn),其搭建流程由并行拓?fù)浣Y(jié)構(gòu)設(shè)計(jì)、MPI調(diào)用、數(shù)據(jù)進(jìn)程編寫三部分共同組成。
2.1 并行拓?fù)浣Y(jié)構(gòu)
并行拓?fù)浣Y(jié)構(gòu)反映了MPI協(xié)議的作用能力,屬于一種映射型連接判別條件,可用來查詢衛(wèi)星遙感數(shù)據(jù)傳輸行為的變化形式,其連接框架中包含多個(gè)協(xié)議管腳,分別用來監(jiān)測(cè)不同的衛(wèi)星遙感數(shù)據(jù)對(duì)象,并可以根據(jù)MPI協(xié)議的執(zhí)行需求,調(diào)整數(shù)據(jù)信息之間的關(guān)聯(lián)特征[13-14]。協(xié)議管腳與MPI協(xié)議主體之間的連接需要借助并行映射條件,前者作為客體對(duì)象能夠準(zhǔn)確記錄衛(wèi)星遙感數(shù)據(jù)的實(shí)時(shí)傳輸位置,并可以在映射條件的作用下,將已記錄信息聚合成數(shù)據(jù)包結(jié)構(gòu),以供MPI協(xié)議主體的直接調(diào)取與利用。MPI協(xié)議主體作為并行拓?fù)浣Y(jié)構(gòu)的核心管控單元,可以借助映射連接通路管控協(xié)議管腳,并對(duì)其中存儲(chǔ)的衛(wèi)星遙感數(shù)據(jù)進(jìn)行管理。并行拓?fù)浣Y(jié)構(gòu)連接原理如圖5所示。

圖5 并行拓?fù)浣Y(jié)構(gòu)連接原理
在并行拓?fù)浣Y(jié)構(gòu)中,MPI協(xié)議、協(xié)議管腳、并行連接映射作為3個(gè)相關(guān)管理的作用結(jié)構(gòu),其連接形式保持獨(dú)立,但對(duì)于衛(wèi)星遙感數(shù)據(jù)而言,這些連接結(jié)構(gòu)之間存在明顯的信息互通行為,且隨著數(shù)據(jù)信息傳輸量的增大,關(guān)聯(lián)拓?fù)浣Y(jié)構(gòu)與系統(tǒng)核心監(jiān)測(cè)主機(jī)之間的連接關(guān)系也會(huì)逐漸趨于穩(wěn)定。
2.2 MPI的基本調(diào)用
MPI調(diào)用也叫MPI協(xié)議調(diào)試。對(duì)于并行拓?fù)浣Y(jié)構(gòu)而言,在制定MPI并行計(jì)算制度時(shí),由于無法控制相關(guān)衛(wèi)星遙感數(shù)據(jù)之間的信息互傳關(guān)系,所以要以MPI協(xié)議為基本原則,對(duì)這些待存儲(chǔ)數(shù)據(jù)信息參量進(jìn)行調(diào)試與整合處理[15-16]。規(guī)定a、s表示兩個(gè)隨機(jī)選取的MPI協(xié)議并行拓?fù)湎蛄浚襛≠s的不等式條件恒成立。da表示與系數(shù)a相關(guān)的MPI協(xié)議調(diào)度權(quán)重指標(biāo),ds表示與系數(shù)s相關(guān)的MPI協(xié)議調(diào)度權(quán)重指標(biāo),ka,s表示MPI協(xié)議的并行變分處理系數(shù),當(dāng)向量a取值不等于向量s時(shí),該項(xiàng)物理指標(biāo)的最小值定義結(jié)果也始終大于物理自然數(shù)“1”。聯(lián)立上述物理量,可將MPI協(xié)議的基本調(diào)用表達(dá)式定義為:
(1)
式中,αa表示與系數(shù)a相關(guān)的MPI協(xié)議并行運(yùn)算強(qiáng)度,αs表示與系數(shù)s相關(guān)的MPI協(xié)議并行運(yùn)算強(qiáng)度。在對(duì)向量a、向量s進(jìn)行取值時(shí),要求兩者不能同時(shí)等于最大值或最小值條件,即在調(diào)用MPI協(xié)議時(shí),至少有一個(gè)并行拓?fù)湎蛄康娜≈到Y(jié)果不等于極限值。
2.3 數(shù)據(jù)進(jìn)程編寫
數(shù)據(jù)進(jìn)程決定了MPI并行計(jì)算的作用能力。在衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)中,為實(shí)現(xiàn)對(duì)數(shù)據(jù)變化指征與非變化指征的準(zhǔn)確辨別,要求數(shù)據(jù)進(jìn)程的編寫必須以MPI并行計(jì)算作為基礎(chǔ),在度量衛(wèi)星遙感數(shù)據(jù)之間關(guān)聯(lián)特性的同時(shí),將MPI協(xié)議的作用范圍限制在既定數(shù)值區(qū)間之內(nèi),一方面縮小衛(wèi)星遙感數(shù)據(jù)變化指征與非變化指征之間的實(shí)值誤差,另一方面也可以避免MPI并行計(jì)算的實(shí)際作用能力預(yù)期作用效果出現(xiàn)偏差[17-18]。設(shè)c表示衛(wèi)星遙感數(shù)據(jù)編碼特征的初始取值,n表示特征指標(biāo)c的最大取值結(jié)果,k1、k2、…、kn表示n個(gè)不同的MPI協(xié)議并行計(jì)算系數(shù)。在上述物理量的支持下,聯(lián)立公式(1),可將基于MPI并行計(jì)算的數(shù)據(jù)進(jìn)程編寫法則定義為:
(2)
其中:δ1表示第一個(gè)編寫的衛(wèi)星遙感數(shù)據(jù)指標(biāo),δn表示第n個(gè)編寫的衛(wèi)星遙感數(shù)據(jù)指標(biāo),f表示基于MPI并行計(jì)算的衛(wèi)星遙感數(shù)據(jù)編碼參數(shù)。根據(jù)并行拓?fù)浣Y(jié)構(gòu)排列方式,對(duì)MPI協(xié)議進(jìn)行調(diào)用處理,再以此為基礎(chǔ),建立完整的數(shù)據(jù)進(jìn)程編寫原則,實(shí)現(xiàn)對(duì)MPI并行計(jì)算的約束與完善。
3 基于MPI并行計(jì)算的衛(wèi)星遙感數(shù)據(jù)處理
在MPI并行計(jì)算原則的作用下,按照傳感器幾何校正、遙感數(shù)據(jù)度量值計(jì)算、核函數(shù)配置的執(zhí)行流程,實(shí)現(xiàn)對(duì)衛(wèi)星遙感數(shù)據(jù)的按需處理,再聯(lián)合各級(jí)硬件執(zhí)行結(jié)構(gòu),完成基于MPI并行計(jì)算的衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)設(shè)計(jì)。
3.1 傳感器幾何校正

(3)

3.2 遙感數(shù)據(jù)度量值
遙感數(shù)據(jù)度量值決定了MPI并行計(jì)算對(duì)于衛(wèi)星遙感數(shù)據(jù)變化行為的監(jiān)測(cè)處理能力。當(dāng)Zigbee 網(wǎng)絡(luò)節(jié)點(diǎn)與傳感器模塊之間的連接穩(wěn)定性不發(fā)生改變時(shí),主機(jī)元件對(duì)于MPI協(xié)議的調(diào)用越頻繁,遙感數(shù)據(jù)度量值指標(biāo)的計(jì)算取值結(jié)果也就越大[21]。在傳感器幾何校正行為的作用下,若衛(wèi)星遙感數(shù)據(jù)的排列狀態(tài)滿足單一集合的調(diào)度需求,則可認(rèn)為當(dāng)前情況下,MPI并行計(jì)算對(duì)于遙感數(shù)據(jù)度量指標(biāo)的影響能力越強(qiáng)[22]。設(shè)w、e表示兩個(gè)不相等的衛(wèi)星遙感數(shù)據(jù)節(jié)點(diǎn)標(biāo)記度量值,但其取值結(jié)果均處于[1,+∞)的物理區(qū)間,R表示基于MPI并行計(jì)算的遙感數(shù)據(jù)篩選系數(shù),且R≥1的不等式條件恒成立。在上述物理量的支持下,聯(lián)立公式(3),可將遙感數(shù)據(jù)度量值表達(dá)式定義為:
(4)
式中,β表示衛(wèi)星遙感數(shù)據(jù)變化行為的方向表現(xiàn)向量,λ表示監(jiān)測(cè)指令的執(zhí)行法向量。在已知傳感器幾何校正強(qiáng)度條件的情況下,對(duì)于遙感數(shù)據(jù)度量指標(biāo)的取值必須嚴(yán)格遵循MPI并行計(jì)算原理,若w系數(shù)、e系數(shù)之間的差值水平較大,則表示待處理衛(wèi)星遙感數(shù)據(jù)相對(duì)較多,為在單位時(shí)間內(nèi)獲得更加精準(zhǔn)的監(jiān)測(cè)執(zhí)行指令,應(yīng)注重對(duì)β向量、λ向量進(jìn)行區(qū)分。
3.3 核函數(shù)配置

具體的核函數(shù)表達(dá)式如下:
(5)
其中:i、u表示兩個(gè)非零函數(shù)基準(zhǔn)值,且u>i的不等式條件恒成立,qi表示與基準(zhǔn)值i相關(guān)的衛(wèi)星遙感數(shù)據(jù)變化行為管控向量,qu表示與基準(zhǔn)值u相關(guān)的衛(wèi)星遙感數(shù)據(jù)變化行為管控向量,ΔT表示監(jiān)測(cè)指令的單位執(zhí)行時(shí)長(zhǎng)。利用核函數(shù)標(biāo)準(zhǔn)對(duì)衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)的執(zhí)行能力進(jìn)行約束,既能滿足MPI并行計(jì)算的應(yīng)用需求,也可以實(shí)現(xiàn)對(duì)數(shù)據(jù)變化指征參量的準(zhǔn)確提取。
4 實(shí)驗(yàn)分析
為驗(yàn)證監(jiān)測(cè)系統(tǒng)對(duì)于衛(wèi)星遙感數(shù)據(jù)傳輸變化行為的管控能力,設(shè)計(jì)如下對(duì)比實(shí)驗(yàn)。選擇基于MPI并行計(jì)算的衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)作為實(shí)驗(yàn)組方法,選擇河流徑流雷達(dá)衛(wèi)星遙感監(jiān)測(cè)系統(tǒng)作為對(duì)照組方法,在其他干擾條件不發(fā)生改變的情況下,記錄衛(wèi)星遙感數(shù)據(jù)變化指征的實(shí)驗(yàn)數(shù)值。具體的實(shí)驗(yàn)參數(shù)配置情況如表2所示。
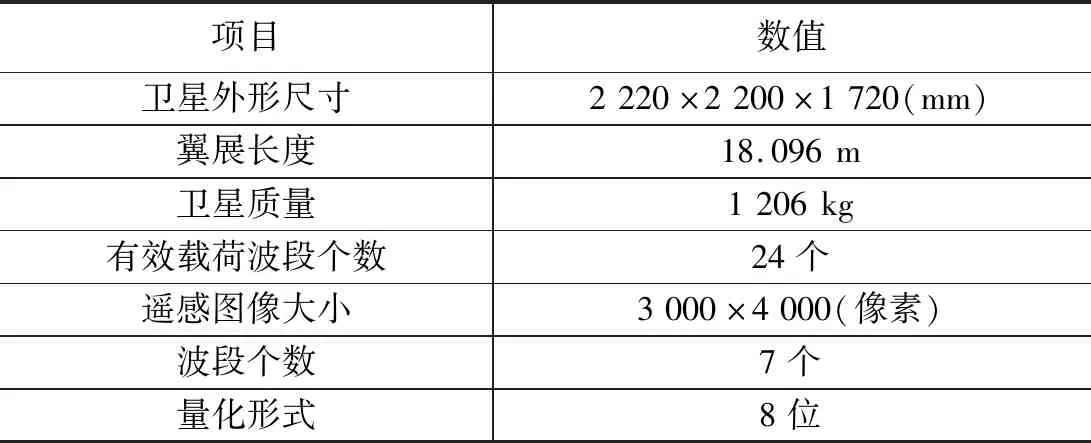
表2 實(shí)驗(yàn)參數(shù)配置
衛(wèi)星遙感數(shù)據(jù)變化指征與非變化指征之間的實(shí)值誤差,可以用來描述主機(jī)元件對(duì)于衛(wèi)星遙感數(shù)據(jù)傳輸變化行為的監(jiān)測(cè)準(zhǔn)確性。在不考慮其他干擾條件的情況下,變化指征與非變化指征之間的差值水平越小,就表示主機(jī)元件對(duì)于衛(wèi)星遙感數(shù)據(jù)傳輸變化行為的監(jiān)測(cè)準(zhǔn)確性越強(qiáng)。
誤差值計(jì)算表達(dá)式如下:
ψ=|y0-(θ1×σ1)|
(6)
式中,y0表示衛(wèi)星遙感數(shù)據(jù)的非變化指征,θ1、σ1表示兩個(gè)不相等的變化指征取值參量((?1×σ1)表示衛(wèi)星遙感數(shù)據(jù)變化指征的計(jì)算取值)。
實(shí)驗(yàn)組、對(duì)照組?1參量與σ1參量的實(shí)驗(yàn)數(shù)值如圖6所示。
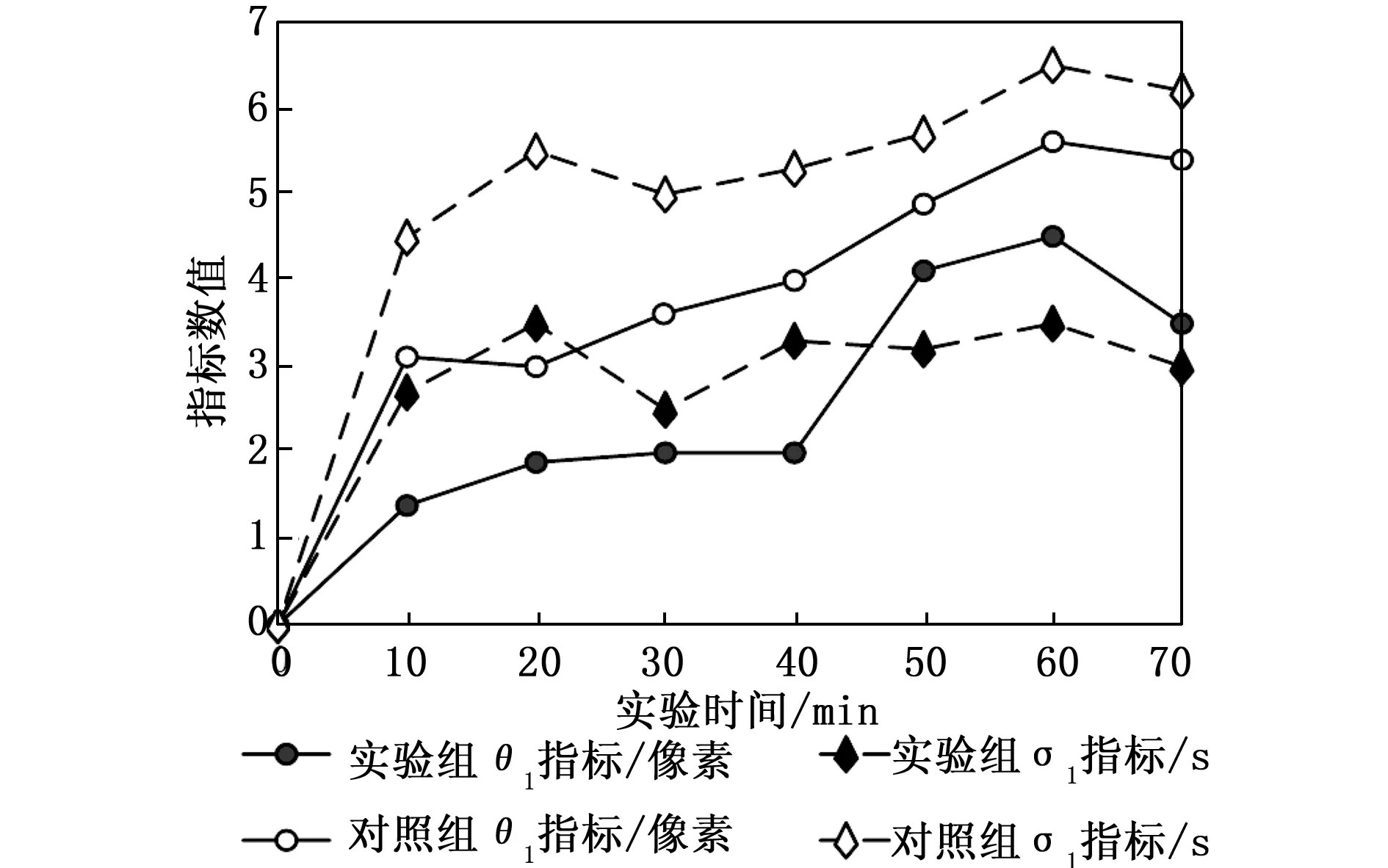
圖6 變化指征參量取值
分析圖6可知,當(dāng)實(shí)驗(yàn)時(shí)間為70 min時(shí),對(duì)照組σ1指標(biāo)數(shù)值均值為5.5 s,實(shí)驗(yàn)組σ1指標(biāo)數(shù)值均值為3.04 s,而對(duì)照組θ1指標(biāo)數(shù)值均值為4.22像素,實(shí)驗(yàn)組θ1指標(biāo)數(shù)值均值為2.77像素。由此可知,在整個(gè)實(shí)驗(yàn)過程中,變化指征取值參量均值的排列順序?yàn)椋簩?duì)照組σ1指標(biāo)>對(duì)照組θ1指標(biāo)>實(shí)驗(yàn)組σ1指標(biāo)>實(shí)驗(yàn)組θ1指標(biāo)。
衛(wèi)星遙感數(shù)據(jù)非變化指征y0的數(shù)值水平如圖7所示。
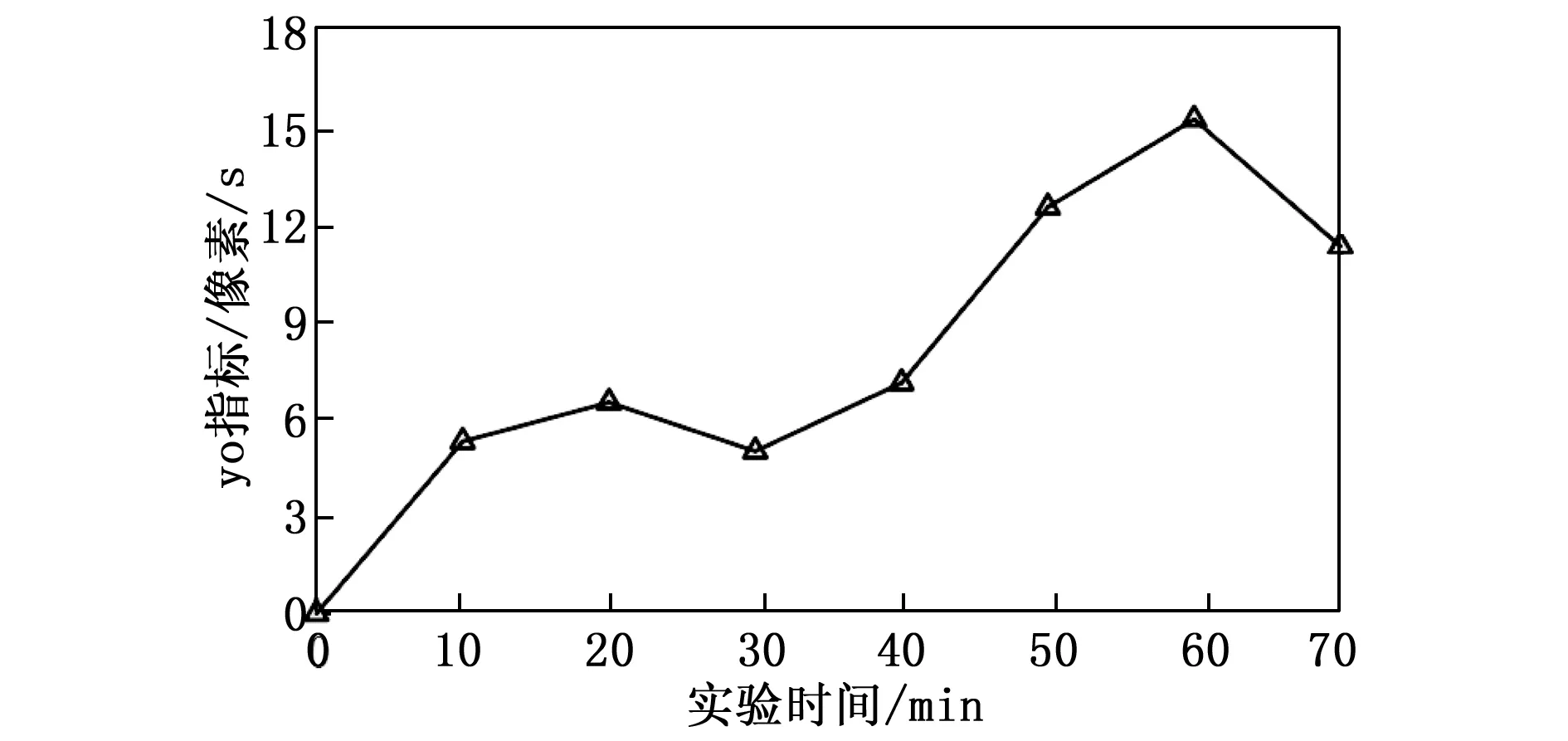
圖7 衛(wèi)星遙感數(shù)據(jù)非變化指征(y0)
聯(lián)立圖6中的記錄數(shù)值與公式(6),對(duì)實(shí)驗(yàn)組、對(duì)照組衛(wèi)星遙感數(shù)據(jù)變化指征進(jìn)行計(jì)算,具體計(jì)算數(shù)值如表3所示。
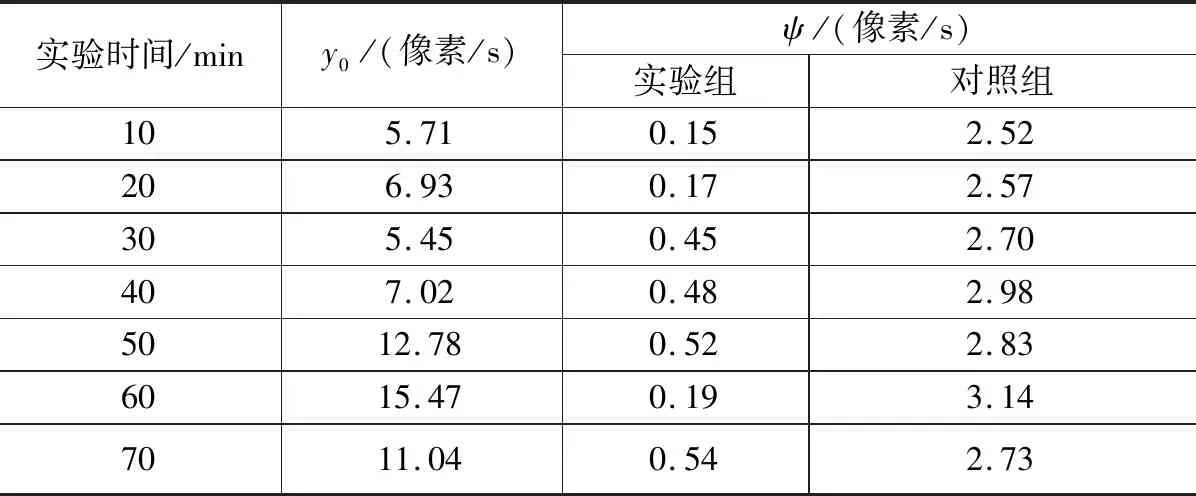
表3 誤差值
分析表3可知,當(dāng)實(shí)驗(yàn)時(shí)間為70 min時(shí),實(shí)驗(yàn)組誤差值ψ指標(biāo)達(dá)到最大數(shù)值0.54像素/s;當(dāng)實(shí)驗(yàn)時(shí)間為60 min時(shí),對(duì)照組誤差值ψ指標(biāo)達(dá)到最大數(shù)值3.14像素/s,與實(shí)驗(yàn)組誤差值最大數(shù)值相差2.6像素/s。在整個(gè)實(shí)驗(yàn)過程中,當(dāng)實(shí)驗(yàn)時(shí)間達(dá)到70 min時(shí),實(shí)驗(yàn)組誤差值ψ指標(biāo)均值為0.36像素/s,對(duì)照組誤差值ψ指標(biāo)均值為2.78像素/s,與對(duì)照組相比,實(shí)驗(yàn)組明顯縮小了2.42像素/s。
綜上可知,本次實(shí)驗(yàn)結(jié)論為:
1)隨著河流徑流雷達(dá)衛(wèi)星遙感監(jiān)測(cè)系統(tǒng)的應(yīng)用,衛(wèi)星遙感數(shù)據(jù)變化指征與非變化指征之間的實(shí)值誤差水平并不能得到有效控制;
2)在基于MPI并行計(jì)算的監(jiān)測(cè)系統(tǒng)的作用下,衛(wèi)星遙感數(shù)據(jù)變化指征與非變化指征之間的實(shí)值誤差出現(xiàn)了明顯下降的數(shù)值變化狀態(tài);
3)與河流徑流雷達(dá)衛(wèi)星遙感監(jiān)測(cè)系統(tǒng)相比,MPI并行計(jì)算更能控制衛(wèi)星遙感數(shù)據(jù)變化指征與非變化指征之間的實(shí)值誤差,實(shí)現(xiàn)對(duì)衛(wèi)星遙感數(shù)據(jù)傳輸變化行為的準(zhǔn)確監(jiān)測(cè)。
5 結(jié)束語
本文設(shè)計(jì)的衛(wèi)星遙感數(shù)據(jù)變化監(jiān)測(cè)系統(tǒng)在MPI并行計(jì)算的基礎(chǔ)上,設(shè)置了A/D轉(zhuǎn)換電路、傳感器模塊、協(xié)調(diào)器設(shè)備等多個(gè)硬件應(yīng)用結(jié)構(gòu),又通過編寫數(shù)據(jù)進(jìn)程的方式,計(jì)算得到準(zhǔn)確的遙感數(shù)據(jù)度量值結(jié)果。與河流徑流雷達(dá)衛(wèi)星遙感監(jiān)測(cè)系統(tǒng)相比,這種新型監(jiān)測(cè)系統(tǒng)可以明顯縮小衛(wèi)星遙感數(shù)據(jù)變化指征與非變化指征之間的實(shí)值誤差,在實(shí)際應(yīng)用方面,能夠滿足準(zhǔn)確監(jiān)測(cè)衛(wèi)星遙感數(shù)據(jù)傳輸變化行為的設(shè)計(jì)需求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
