基于圖像識別技術的隧道工程監控管理系統設計
2022-12-01 01:06:10何方圓
計算機測量與控制 2022年11期
何方圓
(北京市政建設集團有限責任公司,北京 100045)
0 引言
在大型隧道工程運維過程中,由于隧道內部與地面存在空間隔離,隧道因其具有改善路網,節約土地等優點,逐漸成為公路建設的重要組成部分。但由于隧道具有空間狹窄、結構封閉、視線差等缺陷,行車在隧道中容易出現交通事故,也容易因為隧道的盲區導致災難性事故,由于隧道入口的行車無法獲知隧道內的車輛信息,使交通事故進一步擴大。一旦發生事故,救援工作復雜困難,而且容易造成嚴重的交通阻塞,并有可能引發火災,從而引發災難性的后果,因此,保證隧道行車安全至關重要。同時,對于一些進入隧道內的常規車輛,比如追查肇事司機、查詢過往車輛,常規的裝置就很難實現。大量工程建設的進展情況,但仍舊存在一些問題。
文獻[1]在隧道工程建設中采用光纖傳感技術實現隧道工程測量,光纖傳感技術由于其自身具有的技術特性,能夠實現數據信息的無線傳輸,自動化程度高,檢測精度高,而且能夠實現數據信息的實時采集,能夠大大提高隧道工程的診斷能力,精度高。雖然預警能力提高,但該方法成本較高,難以普及。文獻[2] 通過應用分布式光學溫度傳感器實現隧道內電纜技術的檢測,通過隧道巡檢機器人實現異常數據信息獲取,這種方法能夠檢測隧道內電纜故障,并采用了拉曼分布式光纖溫度傳感器,雖然精度提高,但數據分析能力欠佳。
為了提高隧道工程故障診斷能力,采用圖像識別技術實現隧道工程故障診斷,成本低,故障診斷分析能力高。
1 隧道工程可視化監管方案設計
為了提高本研究的技術創新點,本研究設計了一套圖像識別技術實現隧道工程內數據信息獲取和分析,構建多傳感器數據信息融合模型來對巡檢機器人采集的多種數據進行匯總分析,輸出整個隧道工程的運維進度以及運維的相關細節信息。設計一種可視化管理系統,該系統通過多傳感器數據信息融合模型輸出的數據是使模型中的各個單元進行交互,使模型能夠反映隧道工程的運維情況,同時在系統終端通過對模型狀態進行修改[3-4],該可視化管理系統可以自動化的向運維具體負責人傳輸控制信息,高效的完成對隧道工程與模型的交互。隧道工程進行可視化方案的運維建構如圖1所示。
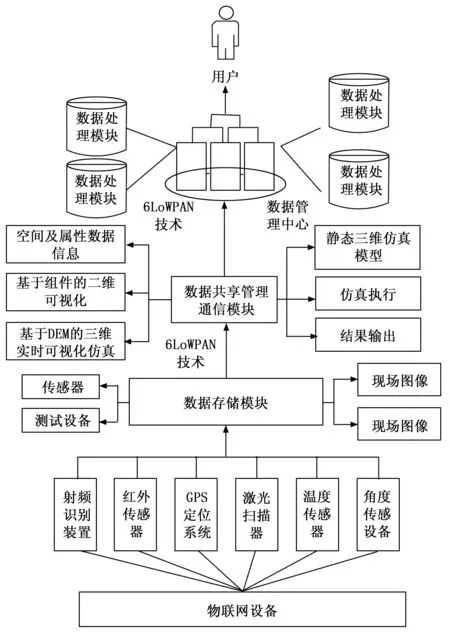
圖1 隧道工程可視化管理體系架構
如圖1所示,本研究設計的運維可視化管理體系通過利用巡檢機器人攜帶多種信息采集裝置,通過多種數據采集裝置采集運維進度信息,并將采集到的設備信息存儲到數據庫中,利用多傳感器數據信息融合模型對數據進行處理[5-6],并通過數據共享管理通信模塊對數據進行處理,通過三維可視化模型對數據進行可視化展示,同時用戶也可以通過三維可視化模型對運維進度進行修正,以此完成對運維進度的雙向監督,雙向管理[7-8]。
1.1 圖像識別技術
該研究采用圖像識別技術實現隧道內的煙、霧、火、溫度的感測,通過報警系統及時提醒行人隧道內的情況以及車輛信息。能夠對霧天、雨天、不同光線下的圖片進行處理、識別,正確地識別圖像中的車輛、車牌、行人,并對行車信息進行保存,方便后續的查詢、跟蹤。行人通過無線藍牙通訊,當行車接近該研究時,可通過手機、PDA與該研究進行無線通訊,用戶通過手機或PDA獲知該研究的信息[9],更進一步地了解該研究的存儲信息。
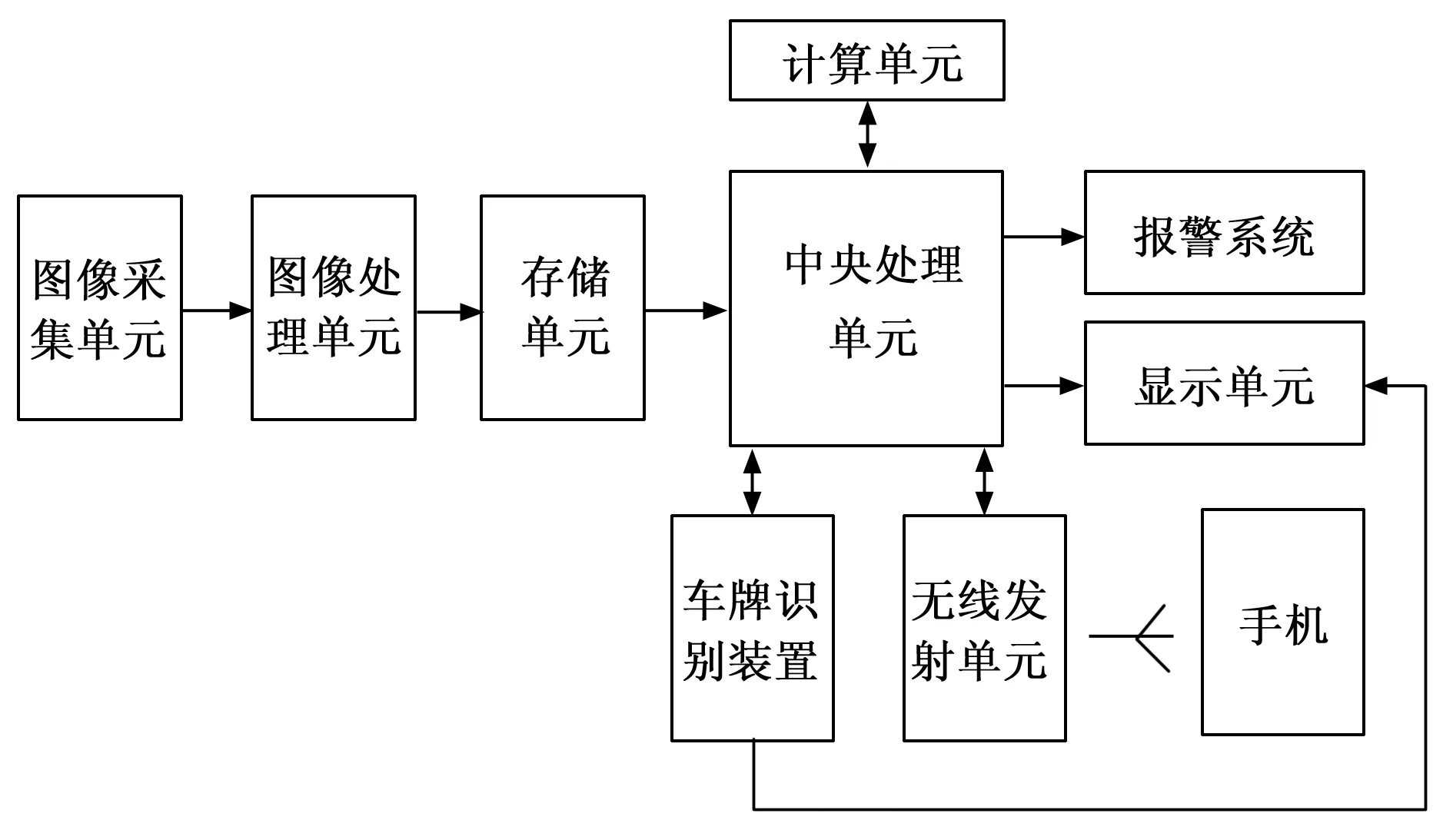
圖2 隧道工程圖像數識別原理架構圖
圖像采集過程是在光源提供照明的條件下,數字攝像機拍攝目標物體,并將其轉化為數字圖像信號,最后通過圖像采集卡傳輸給圖像處理單元。在進行車輛車牌識別時,車輛駛入時,圖像采集單元首先對車牌圖像采集,然后對車牌圖像預處理,進行去噪,圖片更加清楚,在對車牌圖像進行分割,然后對車牌圖形中字符識別,將是識別后車牌圖形中字符存儲,通過顯示單元將車牌圖形中字符顯示。
在圖像采集環節,一般通過CCD攝像頭與視頻卡直接連接完成的,在圖像采集過程中,外界環境可能受惡劣天氣、光照不均、亮度低、對比度太小、傾斜等影響,這些都會影響車牌字符的分割而降低了車牌識別率。對車牌進行預處理就是提高圖片的識別率。
目標圖像識別單元為基于SPCA563B芯片的圖像識別單元,能夠對目標圖像提取單元提取的圖像進行識別,對圖像進行處理、分析,該單元具有圖片識別與處理能力,其提供320*240的8位CMOS圖像傳感器接口,具有自動白平衡和獲得參數控制功能,具有圖像顏色校正和圖像Gamma校正功能,同時也具有良好的減少噪聲的濾波器[10-11]。
報警系統包括報警按鈕、與所述報警按鈕通過總線串聯連接的感煙探測器、感溫探測器、火焰探測器。所述中央處理單元設置有主板,所述主板上設置有主頻為1.86 GHz的Intel Atom D2550處理器。
在該研究中,特征匹配目標計算單元是采用利用目標的局部模板在當前幀進行匹配獲取目標候選區域,利用改進的距離加權彩色直方圖計算候選區域與局部模板的相似度,結合直方圖的相似度和卡爾曼預測確定目標的位置。在具體實施例中,在進行特征匹配時,首選要判斷目標的運動狀態,比如,新的行車目標的出現、舊的行車目標的消失、目標匹配、目標分裂以及目標之間的相互遮擋,在該實施例中,利用目標的運動特征建立數據關聯矩陣判斷目標的運動狀態,然后對各狀態分別進行針對性的處理[12]。
在進行目標跟蹤前,需要檢測出場景出現的目標,在具體應用中,通過目標檢測模型進行目標檢測計算,為了能夠實時對目標進行跟蹤,在具體應用中采用背景建模來提取攝像機場景中的目標輪廓,實用混合高斯計算模塊對視頻場景進行建模,利用背景減除單元提取前景目標,然后利用形態學濾波器關聯斷裂的目標并去噪聲,最后根據場景中目標的尺度閾值過濾掉尺度較小的目標,最終獲得當前幀出現的運動目標的輪廓外接矩形。根據外形特征,再調用模板進行匹配,在匹配過程中,由于各模板中的前景和背景的像素比不同以及各模板尺度差異等因素,使得僅根據匹配度確定最終匹配區域是不合理的,模板匹配的最有匹配區域僅僅只能作為候選區域,因此為確定目標的位置,還需要結合目標的其他特征進行精確匹配。與其他特征(比如,紋理、梯度直方圖等)相比,目標的顏色特征對圖像的尺度、方向、視角的依賴性較小,在該研究一個具體實施中,采用顏色特征對模板匹配的結果進行進一步的精確匹配[13]。
圖像處理單元可以不僅可以處理圖像,還具有視頻圖像處理的功能,圖像處理單元利用計算機視覺技術與數字圖像處理技術能夠處理道路上交通監控的實時視頻圖像信息,達到運動車輛自動檢測、運動狀態預測、車輛自動跟蹤等目的,從而自動快速檢測車道變換、超速、慢速、停止、交通阻塞等事件及進行車型、平均車速等交通參數的統計,并自動記錄相關數據。
1.2 多傳感器數據信息融合模型
由于巡檢機器人采用多種形式的傳感器,需要對采集到的數據信息進行融合,以提高數據采集和處理能力。多傳感器數據信息融合模型,如圖3所示。
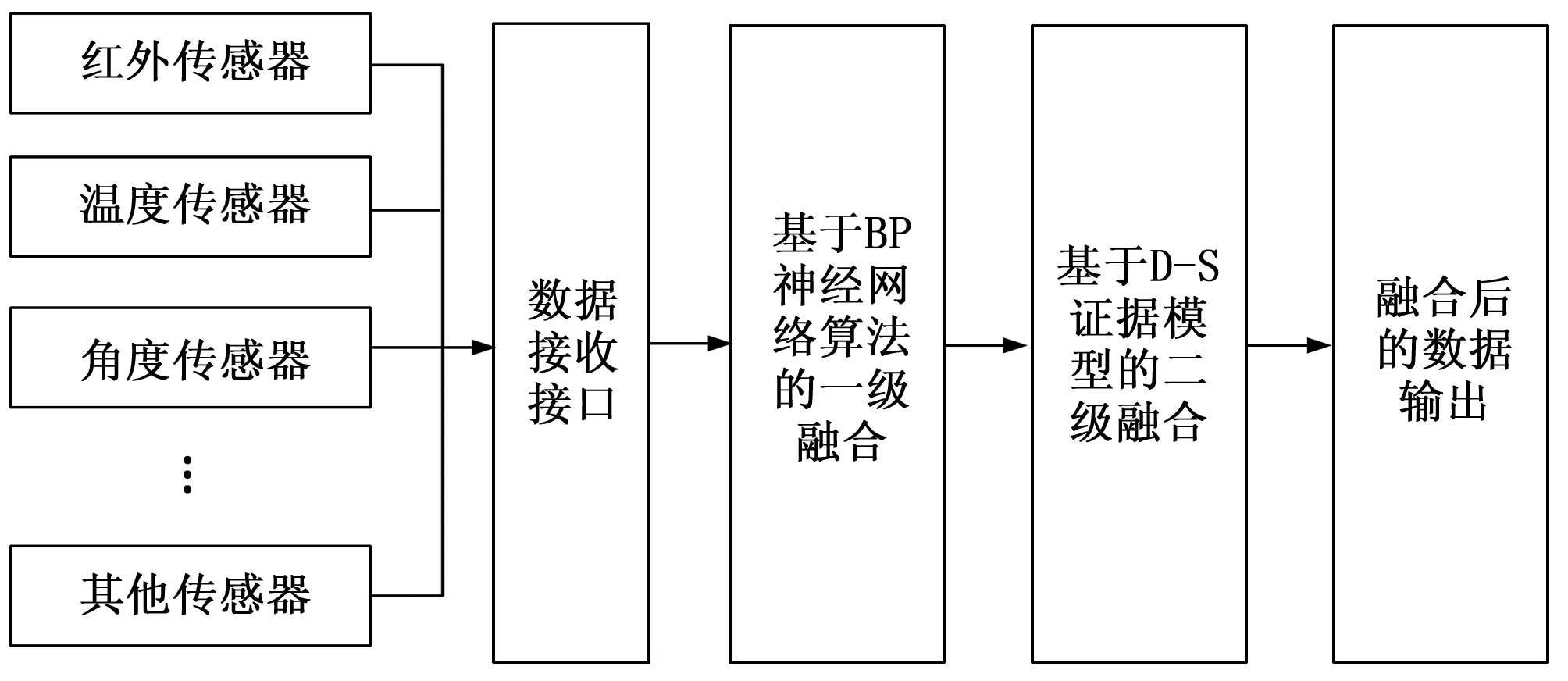
圖3 多傳感器數據信息融合模型
設多種傳感器輸入的數據信息集合記作為W={xi},融合后的輸出傳感器指標數據結合為H={1,2,…,N},多種不同的數據傳感器數據點xi和xj信息之差距離為Dij,為了提高不同傳感器數據處理能力,將不同數據傳感器數據之間定義為距離Dc,通過這種方式進而輸出隧道運維數據信息集中,然后選擇隧道運維采集到的不同數據中心點的局部密度特征量ρ[14],通過以下函數表示:
(1)

(2)
式(2)表示(Mi,Kj)神經網絡算法模型中的網絡權值,χ為神經網絡算法模型中的閾值,αi為神經網絡算法模型中的數據輸入節點,βi表示為神經網絡算法模型中的隱含節點,εi表示為神經網絡算法模型中的輸出節點,τ為神經網絡算法模型中的加權因子,υ表示為神經網絡算法模型中的步長[16]。
所有傳感器融合后的數據信息的誤差公式可以為:
(3)
由于輸入層中特征參數不同,維度也不同,用ω表示。其中用I={I1,I2,…,In}表示為神經網絡算法模型的輸入層神經元,則經過一次數據融合后的數據信息表示為:
(4)
然后再進行二次數據融合,采用D-S證據模型能夠將多種建筑運維數據信息實現全局融合,提高數據信息的融合度,假設存在m:2S→[0,1],基本概率分配函數用識別框架S表示,在函數方程中,存在基本可信數m(B)∈[0,1],在該函數方程中,數據的概率分布存在這樣的數據屬性:?B?S。由于隧道運維中各種證據數據信息來源不同,則會輸出n個不同的隧道運維可視化基本概率分配函數[17],在多種數據傳感器輸出后的信息中,m1,m2,…,mn分別表示相同識別框架S上不同隧道運維信息,則輸出的多信息融合模型可以通過以下公式表示:

(5)
其中的Q為D-S證據模型中的沖突權值。當Q≠1,表示D-S證據模型中輸出的證據不同,當Q=1,表示D-S證據模型中的證據存在沖突行為。
通過上述二次數據融合,實現了多種傳感器數據信息的融合。
1.3 基于GIS技術的可視化仿真
本研究利用GIS技術設計動態可視化仿真模型,其中針對于模型進行變形處理,通過對組成元素進行坐標變換,使三維模型在屏幕上以二維圖形進行顯示,通過實驗控制器進行設計合適的用戶界面,分析用戶輸入的內容提供合適的響應方式。
在對隧道數據進行分析的過程中,本研究采用層次模型的細節生成方案,方案通過設計一種均勻的高度場來對隧道進行處理[18],分析建立隧道矩陣,在水平二維空間中建立空間坐標系,其中高度通過空間坐標函數z(x,y)來表示。
在模型建立的過程中需要分析真實空間中的坐標到模擬建立的模型中的坐標過程中發生的偏差。其中在獲取真實坐標時需要對其進行測量,這將可能發生一定的偏差;在模型投射到屏幕上的圖像同樣會發生誤差。
在真實空間坐標測量誤差中,由于不同高度場中的物體通過測量獲取其與原點之間的偏差,可以計算出不同空間位置的坐標變換[19]。通過分析各個點之間的偏差,其中遞增的誤差如式(6)所示。
(6)

(7)
如式(7)所示,其中Di,j表示為通過對三角形進行遞歸對分法所產生的子節點構成的數據集合,就可以得出采用該方案進行誤差處理,可以使其在構成的菱形圖案中需要所產生的誤差縮減為i與其子集之間的最大誤差之間[20]。
在針對于計算屏幕空間的誤差問題,本研究選擇通過分析視覺方向和坐標與視覺點的距離進行屏幕誤差分析,該方案可以通過更小的計算量實現誤差的計算。其中投影誤差分析圖像如圖4所示。
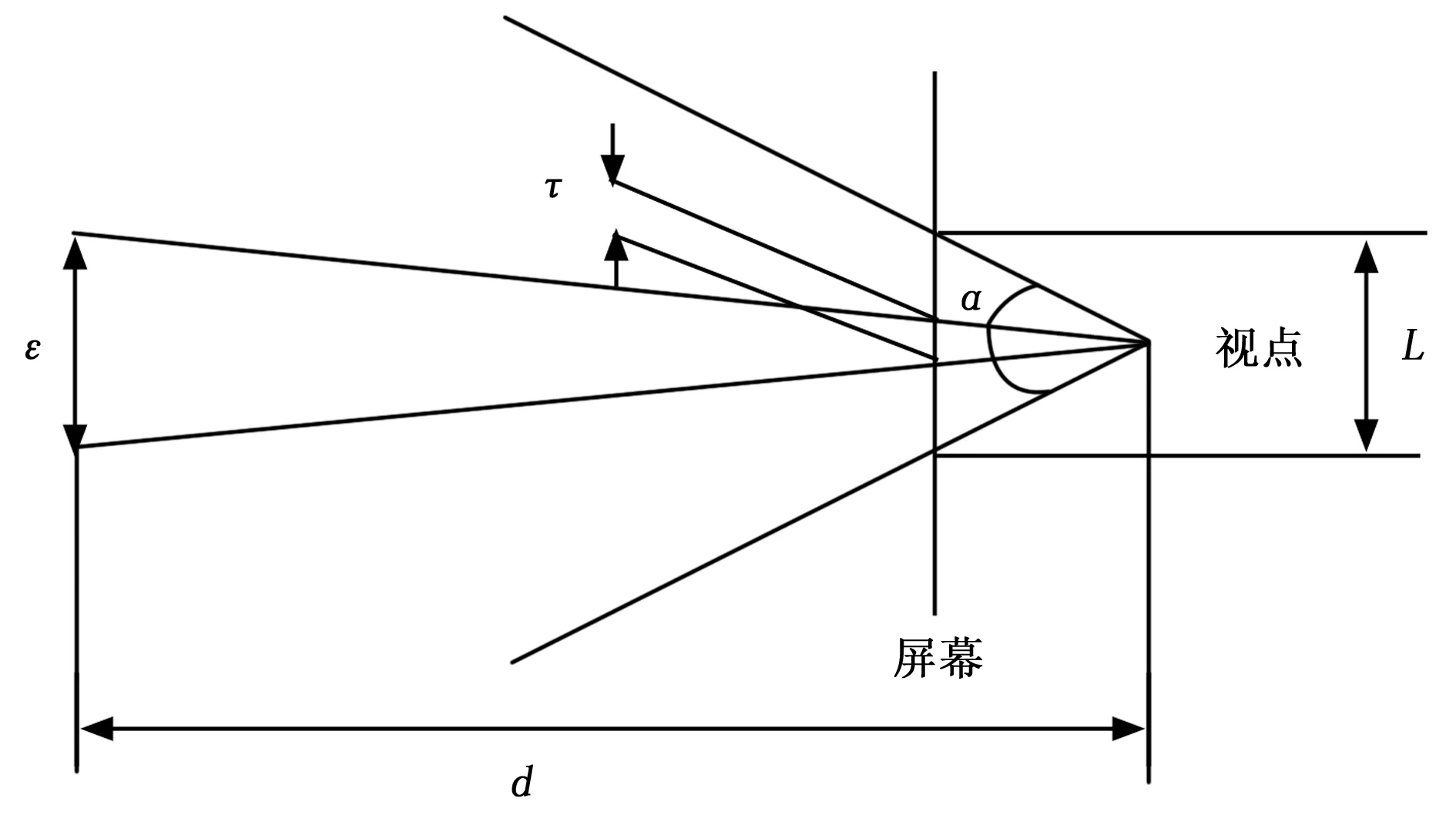
圖4 屏幕投影示意圖
如圖4所示,該圖像表示為一個立體物體在屏幕上進行投影,其中屏幕的長度為L,其人物視角的張角為α,需要被投影的線段長度為ε,人物視點與進行投影的物品之間的距離為d,其中幾何變換形式公式如式(8)所示。
(8)
如式(8)所示,通過透視投影對模型數據進行投影,可以得出隨著視點與投影物品之間的距離逐漸變大,其投影誤差將會變小[21]。假設線段在屏幕中的投影長度為ρ,那么其的長度如式(9)所示。
(9)
如式(9)所示,其中表示為屏幕中線段在屏幕中所占的像素數。因為式(3)所設計的函數進行投影是進行投影到一個圓上,需要一個參數對其進行調節,使其變換成為一個平面投影[22-24]。本研究設計的GIS的可視化仿真是通過數據采集模塊進行采集相關地理和事物信息,通過采集的信息設計合理的分析模型,其基于GIS技術的動態可視化模擬仿真系統如圖5所示。
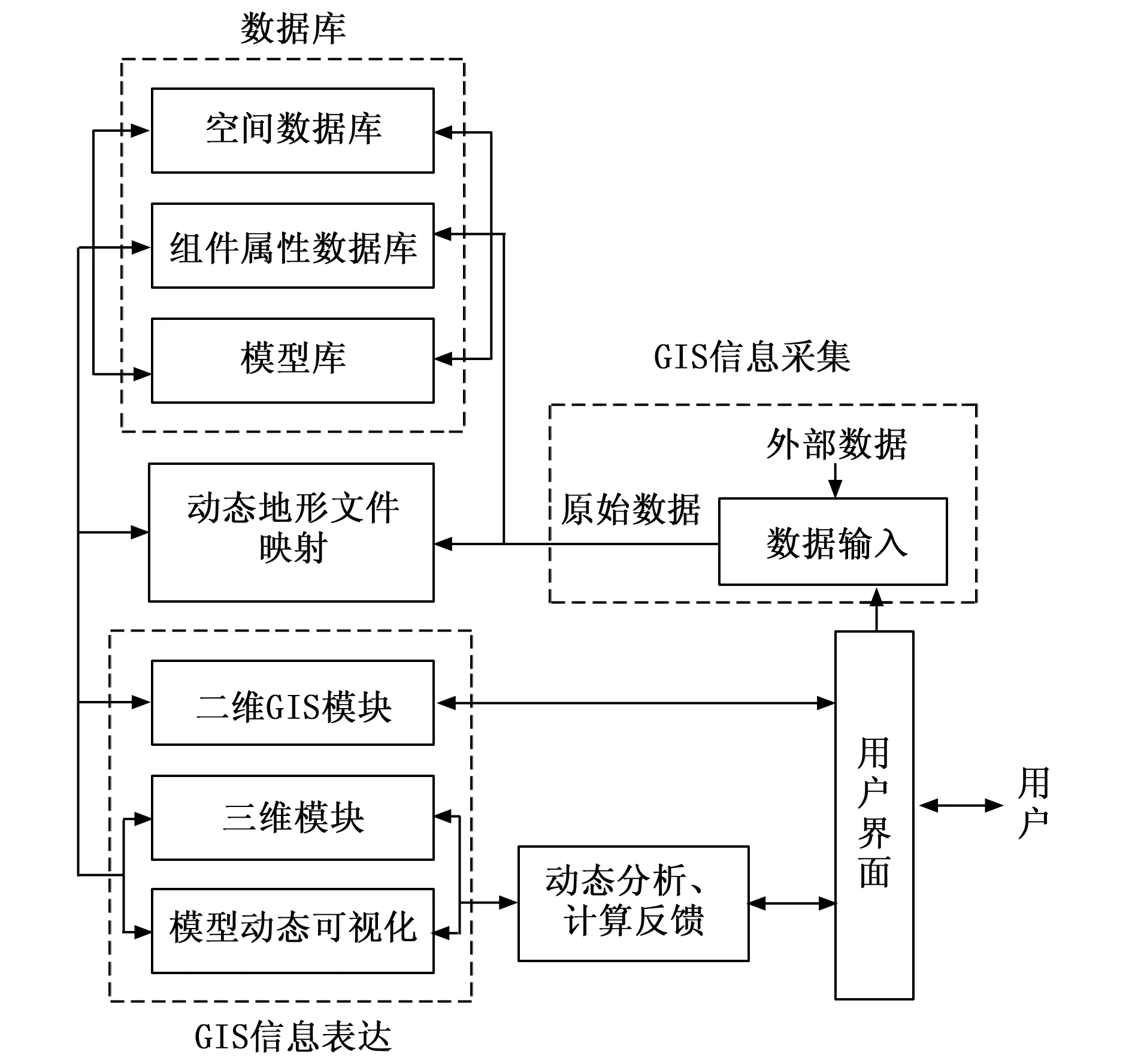
圖5 基于GIS技術的動態可視化模擬仿真系統
如圖5所示,本研究設計的動態可視化模擬仿真系統利用圖像采集系統采集原始的外部圖像數據,通過數據輸入接口輸入數據庫中,通過對采集的圖像信息進行處理,分析圖像中所包含的各個組成元件以及其的相關屬性[25],并建立其空間中各個組成元素的空間坐標建立空間數據庫,并根據實際采集的圖像數據進行分析進行各個組成單元的虛擬模型,通過在動態的隧道文件夾中進行空間坐標的內存映射,利用二維的GIS技術進行模擬仿真分析,并且利用數據庫中的相關數據建立三維模塊,分析建立的三維模塊實現三維的可視化數據處理模型[26]。
當利用GIS技術建立數字模型需要分析空間中各個組成單元之間在時間的交互關系,以此建立一個多組成單元相關交織形成的三維模型,該三維模型通過建立一個能夠真實反映工程進度的靜態和動態的時空信息的三維數字模型[27],以此實現隧道工程的可視化仿真。
在對地理信息建立數字化建模時常采用不規則的三角網模型和規則的網格模型進行分析。其中不規則的三角網模型通過在隧道中設計選取不同的坐標點,利用坐標點之間進行連接,對隧道的全面覆蓋,其中各個三角網之間完全不覆蓋,通過三角網的變化體現出隧道的高低變化[28]。規則網格模型通過利用大小相同的柵形網格完全的覆蓋地面,以此表示較為平坦的地面。用于大型隧道較為復雜,因此本研究選用不規則的三角網模型對隧道進行建模,其中針對于靜態的隧道數據的流程如圖6所示。
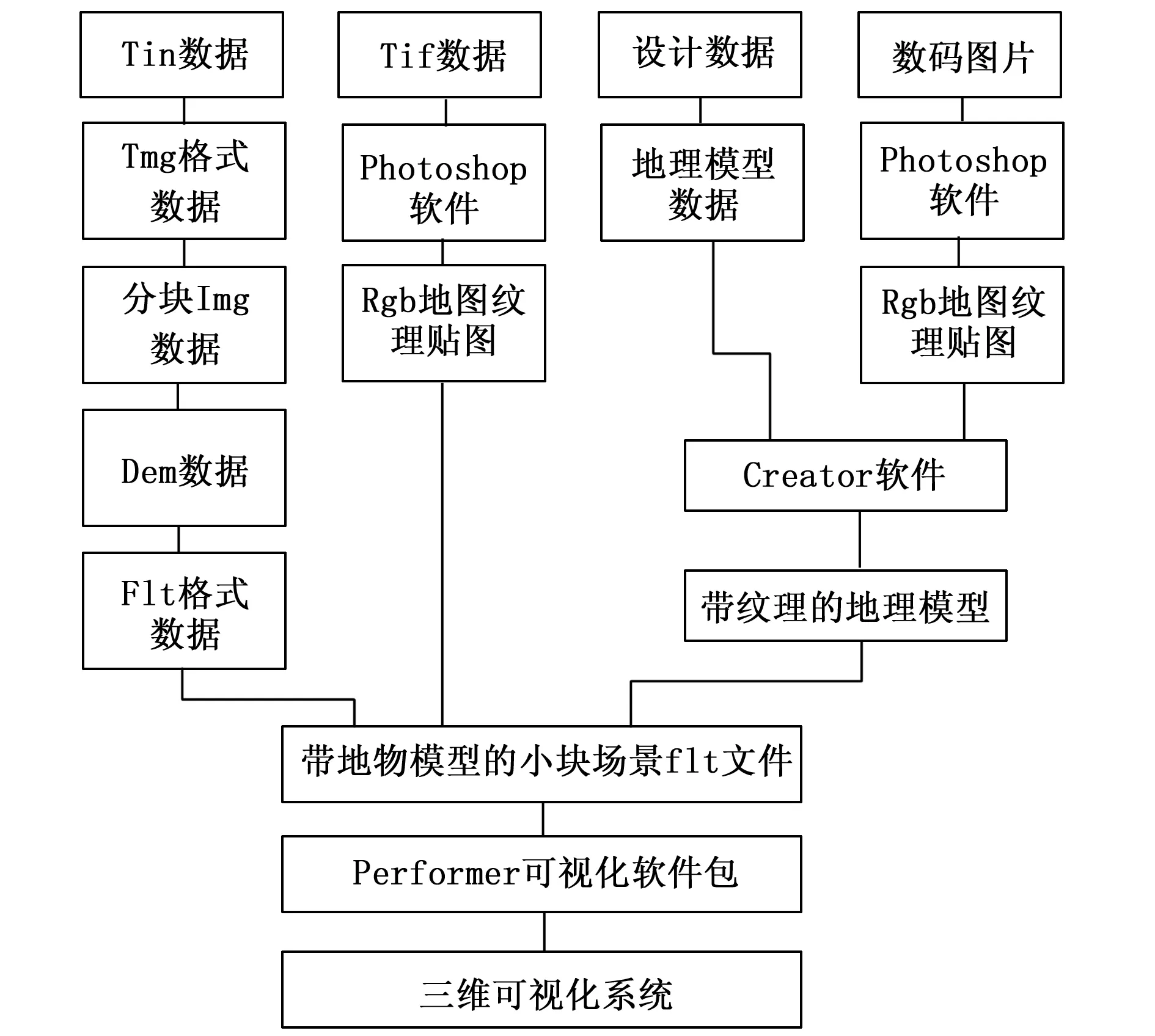
圖6 靜態隧道處理流程圖
如圖6所示,本研究通過航拍等圖像采集方案采集大量的地貌圖像和組成單元進行建立虛擬模型,通過相應的數據轉化工具將采集的地貌數據轉化成為建立的模型數據和貼圖數據,通過模型數據建立建筑建設空間的三維模型,之后利用采集的圖像分離出來的貼圖對建立的三維模型進行貼圖,以此實現靜態三維隧道模型[29]。
2 模擬仿真
為了分析本研究設計的巡檢機器人監管方案的可行性,本研究通過分析不同情況對算法所造成的影響,通過選擇某地的一組隧道數據進行檢驗[21]。在本次實驗中所選取的計算機模擬環境為:選用Windows 10作為操作系統平臺,設置計算機內存為32 G,Intel Xeon W-2145 CPU 3.70 GHz,本次模擬仿真實驗的軟件選取matlab 7.0軟件,在本次實驗中選取某市某地選取一組1 025*1 025規格的網格隧道數據進行分析。獲取的圖像信息如表1所示。

表1 獲取的圖像信息表
實驗設計將對比本研究系統智能識別方法與BP神經網絡智能識別方法的識別準確率性能。實驗方法識別距離均在50米內(設置超過20米為遠距離),識別是否火災(X1)、是否交通擁堵(X2)與是否隧道煙霧報警(X3)這3種情況,并從這3個隧道運維圖像中隨機選擇了900張圖像,對比不同方法在不同距離條件下圖像識別準確率,BP神經網絡識別結果圖如7所示。

圖7 BP神經網絡識別準確率性能
從圖7可以看出,BP神經網絡的智能識別方法受到距離影響較大,在實驗樣本數據不斷增加的情況下,識別準確率先是逐漸增加,然后逐漸減小,這表明BP神經網絡的智能識別方法不能在大數據環境下進行智能識別,具有一定的局限性。相同條件下,關于本研究所用方法性能結果圖如8所示。
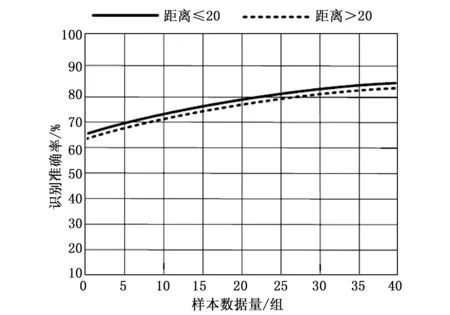
圖8 本研究系統識別準確率性能
從圖8可以看出,相對于BP神經網絡的智能識別方法來說,本研究系統的智能識別方法在距離小于20 m與距離大于20 m的環境下,識別隧道運維的準確率相差微乎及微,并且,在實驗樣本數據不斷增加的情況下,識別準確率逐步增加,最高達到了85%,具有良好的識別結果,從而證明本研究系統智能識別方法的有效性與適用性。
為了分析本研究設計的通過巡檢機器人設計的可視化方案的效果,本次是通過采集用戶對管理系統在視圖細節準確性、視圖反映速度和系統穩定性3個方面進行分析,并得出綜合的評價得分,本次評價采用5個星級的評價標準,星級越高,用戶的滿意程度越高,并將本研究設計方案與BIM監管方案進行比較,其中用戶對兩種不同監管方案的滿意度評價結果如圖9所示。
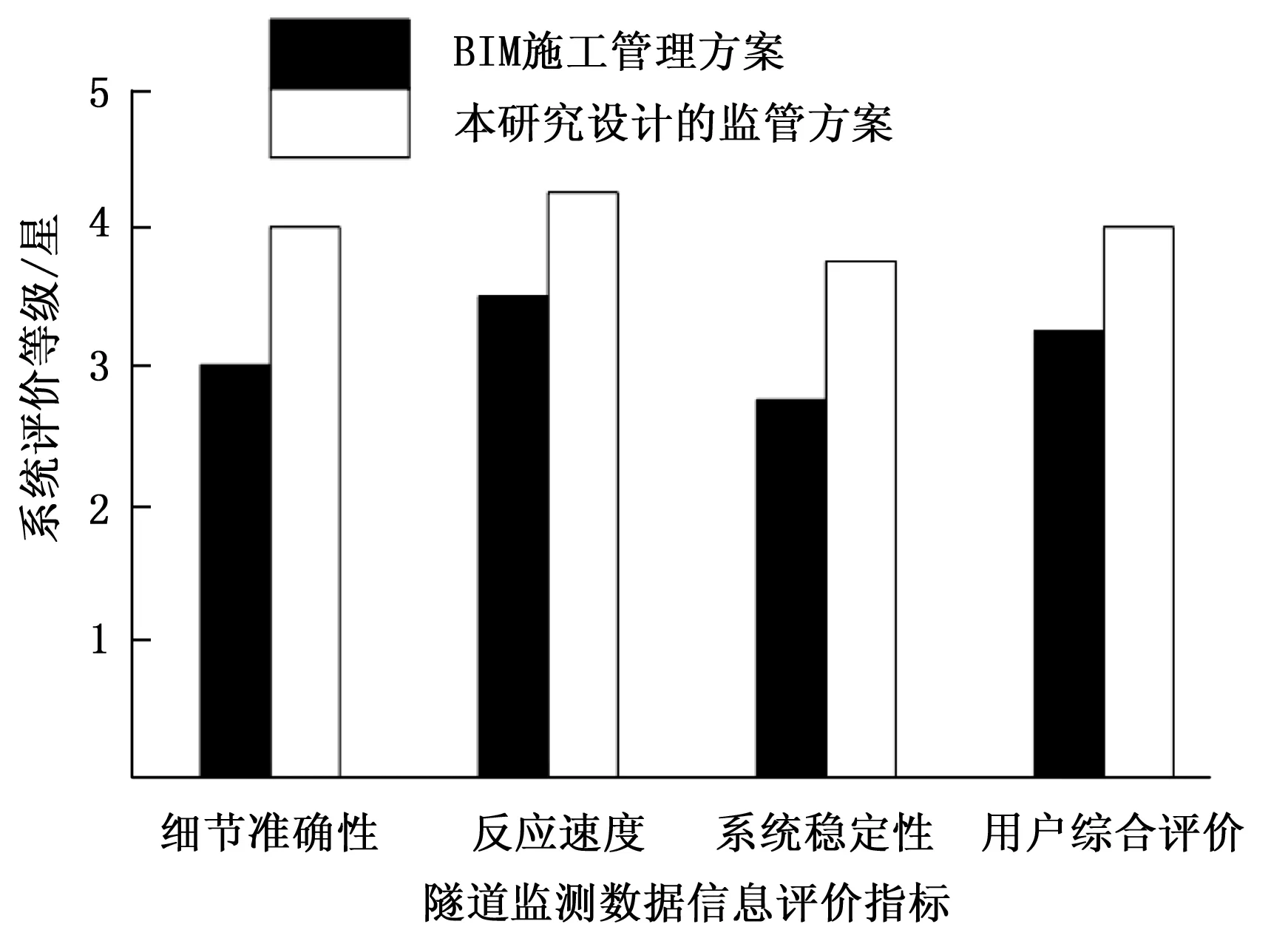
圖9 巡檢機器人監管系統評價結果
如圖9所示,其中黑色表示為對BIM運維管理方案的評價,白色的表示為本研究設計可視化管理方案,通過圖像可以得出本研設計的可視化管理方案在3個評價指標中都高于BIM管理方案,其用戶綜合評價得分中本研究設計的監管方案得分提升了21%。
3 結束語
針對隧道工程的監管方案,本研究利用巡檢機器人對運維場地進行自動化的巡檢,通過利用構建多傳感器數據信息融合模型對巡檢機器人采集的數據進行分析,并利用三維模型為基礎上實現運維項目進行可視化管理, 通過分析經過視覺點進行刪減三角形空間單元的數量,可以提高模型的刷新效率,通過對各個不同的屏幕空間誤差閾值進行分析,可以得知通過視覺點可以刪減掉約50%的三角形空間單元。通過將本研究的巡檢機器人監管方案與BIM監管方案通過用戶評價進行比較,可以得出用戶對本研究設計監管方案的評價得分比BIM監管方案高21%,因此本研究設計的可視化方案更能滿足用戶的需求。
綜上所述可以得出采用本研究設計的模型生成技術可以提高可視化圖像的生成效率和屏幕刷新率,用戶對所設計的監管系統有更高的滿意度,但是由于在真實情況運行較少,可能會出現細節性問題,需要更進一步的優化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
數學物理學報(2020年2期)2020-06-02 11:29:24
傳媒評論(2019年4期)2019-07-13 05:49:14
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
中外會展(2014年4期)2014-11-27 07:46:46
