加速度傳感器的實現(xiàn)與檢測
2022-12-06 14:44:34劉驊鋒嚴(yán)世濤劉金全
物理實驗 2022年11期
劉驊鋒,楊 正,嚴(yán)世濤,劉金全
(華中科技大學(xué) 物理學(xué)院,湖北 武漢 430074)
加速度傳感器是測量載體加速度的儀器,通常借助于彈簧和振子(質(zhì)量塊)構(gòu)成的力學(xué)系統(tǒng),利用質(zhì)量塊的慣性,將載體運(yùn)動的加速度轉(zhuǎn)變?yōu)檎褡酉鄬τ谳d體的機(jī)械運(yùn)動,將這種相對運(yùn)動轉(zhuǎn)換為電信號,即可以實現(xiàn)對加速度的測量. 在地面附近,除去重力加速度的影響后,可得到物體相對慣性空間的運(yùn)動加速度,對運(yùn)動加速度進(jìn)行一次和二次積分可以得到導(dǎo)航和制導(dǎo)所需的載體速度和位置[1]. 二次世界大戰(zhàn)中,德國人在V2型火箭上首次應(yīng)用積分加速度傳感器;至今,已有近百種不同類型的加速度傳感器問世,并被廣泛應(yīng)用于智能手機(jī)、可穿戴設(shè)備、無人機(jī)、自動駕駛、工業(yè)控制、汽車制動啟動報警、環(huán)境監(jiān)測、工程測振、地質(zhì)勘探、地震檢測、建筑結(jié)構(gòu)動態(tài)特性和安全偵查等領(lǐng)域[2-7]. 此外,高精度加速度傳感器在重力測量、空間探索、引力波探測等尖端領(lǐng)域也扮演著日益重要的角色[8].
本文通過在實驗室中實現(xiàn)開環(huán)、閉環(huán)加速度傳感功能,讓學(xué)生領(lǐng)略并掌握高精度加速度傳感過程中涉及的物理概念和精密測量手段,包括加速度-位移-電容信號轉(zhuǎn)換、開環(huán)/閉環(huán)工作模式、微弱信號檢測、精密標(biāo)定等內(nèi)容.
1 加速度傳感器的基本原理
加速度傳感器的種類繁多. 按照電信號檢測方式,可分為電容-位移檢測式、諧振式和光學(xué)式加速度傳感器等;按工作模式,可分為開環(huán)和閉環(huán)2類. 本實驗以電容式加速度傳感器為對象,分機(jī)械敏感模塊(加速度-位移轉(zhuǎn)換)、電容-位移檢測模塊、微弱信號檢測電路模塊(電容-電壓轉(zhuǎn)換)和閉環(huán)工作模塊4部分進(jìn)行功能介紹,并對傳感器性能和輸入-輸出關(guān)系進(jìn)行了探究.
1.1 機(jī)械敏感結(jié)構(gòu)的基本原理
加速度傳感器的力學(xué)模型是質(zhì)量-彈簧-阻尼器力學(xué)系統(tǒng),敏感質(zhì)量塊(振子)通過約束部件連接在殼體上,殼體通常與載體固連,其模型示意圖如圖1所示.

圖1 線加速度傳感器的力學(xué)模型
該系統(tǒng)為模型的二階連續(xù)時間系統(tǒng).假設(shè)載體和加速度傳感器一起以加速度a(t)運(yùn)動,則敏感質(zhì)量塊m感受到的慣性力為F=-ma(t).同時,在載體(殼體)坐標(biāo)系中,質(zhì)量塊偏離平衡位置的位移為x(t).通過測量位移,可以得到F,即可以獲得加速度的測量值.該力學(xué)模型滿足二階微分方程[9]:
(1)
將式(1)進(jìn)行零初始條件下拉氏變換,得到
(ms2+γs+k)X(s)=-mA(s) ,
(2)
其中,s為拉氏算子,X(s)和A(s)分別為x(t)和a(t)的拉氏變換.得到加速度與質(zhì)量塊位移間的傳遞函數(shù)為
(3)
由式(3)可見,加速度傳感器無阻尼自振角頻率(本征諧振頻率)為
(4)
將靜態(tài)情況下加速度傳感器的靈敏度定義為靜態(tài)靈敏度Ks,其表達(dá)式為
(5)
由式(4)和式(5)可知,對于線加速度傳感器,敏感質(zhì)量越大,彈性勁度系數(shù)越小,系統(tǒng)的無阻尼自振角頻率越低,加速度傳感器靈敏度越高.將s=jω代入式(3)可得到該機(jī)械結(jié)構(gòu)的響應(yīng)幅值隨頻率變化的函數(shù)(簡稱為幅頻響應(yīng)函數(shù)),其表達(dá)式為
(6)

當(dāng)外界加速度作用在敏感質(zhì)量塊上時,將會以式(6)確定的位移和加速度的振幅比例關(guān)系產(chǎn)生對應(yīng)位移,通過采用電容、壓電、光學(xué)等位移傳感手段檢測位移,即可達(dá)到加速度檢測目的.當(dāng)ω?ω0時,幅值響應(yīng)與ω2成反比,迅速衰減.由此可見降低ω0,可以提高傳感器靈敏度,但加速度傳感器較為靈敏的工作頻段相應(yīng)減小.幅值-頻率響應(yīng)關(guān)系將在實驗中通過振動臺的頻率掃描實驗進(jìn)行驗證,讓學(xué)生體會靈敏度和傳感器帶寬之間的相互制約關(guān)系,并思考如何進(jìn)行改善.
為了讓學(xué)生體會高靈敏度機(jī)械傳感結(jié)構(gòu)的設(shè)計方法及加工需求,在此階段鼓勵學(xué)生運(yùn)用力學(xué)和機(jī)械設(shè)計方面的知識對彈簧振子結(jié)構(gòu)進(jìn)行分析和設(shè)計.在此基礎(chǔ)上,對加工出來的零部件進(jìn)行實際組裝,體會如何將圖1的原理圖轉(zhuǎn)變?yōu)檎鎸嵅考?
1.2 位移-電容轉(zhuǎn)換原理
位移-電容檢測部分將敏感質(zhì)量塊位移的變化轉(zhuǎn)換為電容的變化,主要分為改變面積和改變間距2種形式.本實驗采用變間距的方式,基本原理如圖2所示.
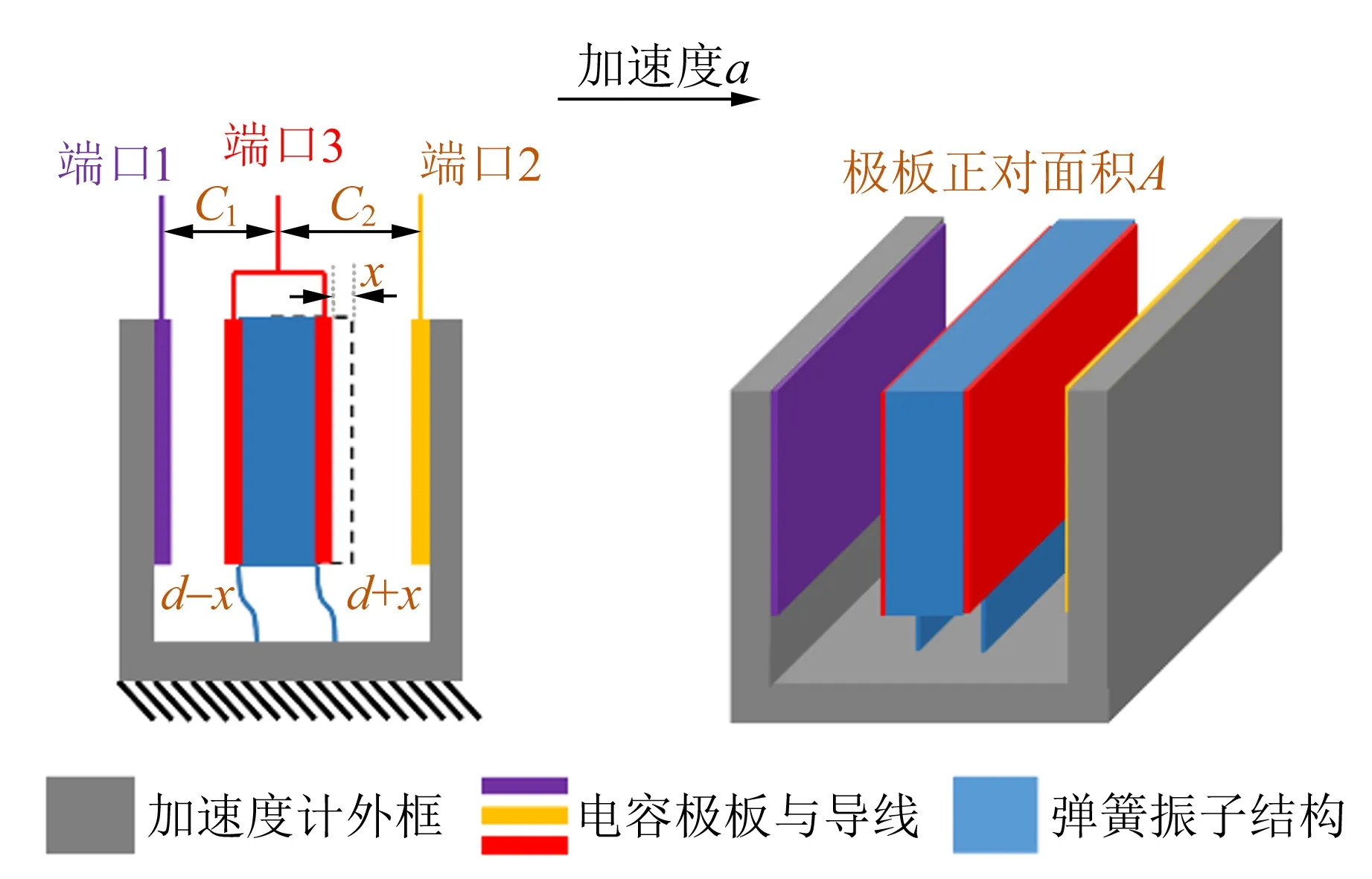
圖2 加速度傳感器位移-電容傳感原理
敏感質(zhì)量塊通過簧片與載體外殼相連,當(dāng)外界加速度信號a作用到加速度傳感器系統(tǒng)后,敏感質(zhì)量塊上的電容動極板與固定在外框上的電容定極板產(chǎn)生相對位移,從而產(chǎn)生極板間距變化x.端口1與端口3之間的電容C1以及端口2與端口3之間的電容C2發(fā)生與位移x相關(guān)的差分電容變化ΔC,通過泰勒展開可表示為

(7)
(8)

(9)
由式(9)可知,相對于采用C1或C2之一進(jìn)行檢測,差分方式消除了共同的偏置項C0,為后端信號處理電路采用較大的增益因子,放大和位移有關(guān)的微弱電容變化奠定了基礎(chǔ);同時,敏感質(zhì)量塊的平衡位置相對于定極板理想對稱的情況下,二階項消失,在位移較小的情況下提升了電容-位移檢測的線性度;當(dāng)x?d時,可以近似認(rèn)為只存在和x有關(guān)的線性項,且系數(shù)提升為原來的2倍.此時,電容-位移傳遞函數(shù)為
(10)
由式(10)可知,當(dāng)電容極板的正對面積越大、間距越小,位移到電容的轉(zhuǎn)換效率就越高,探測靈敏度也會相應(yīng)提高.值得注意的是,減小間距提高靈敏度的同時,加速度傳感器的開環(huán)工作范圍將變小,并且根據(jù)式(9)中的非近似形式,非線性效應(yīng)也將增強(qiáng).這在后續(xù)的標(biāo)定實驗中,可以通過觀察加速度傳感器輸入和輸出間是否符合線性關(guān)系予以驗證.
1.3 基于調(diào)制-解調(diào)的微弱信號檢測原理
當(dāng)外界的加速度非常微弱時,產(chǎn)生的電容變化也非常微弱.為實現(xiàn)微弱電容變化信號的檢測,常采用基于調(diào)幅思想的調(diào)制-解調(diào)方法.從頻域上看,調(diào)制就是將電容變化信號的頻譜從低頻搬移到高頻信道的過程,而解調(diào)是將信道中的頻帶信號恢復(fù)為低頻電容信號的反過程.調(diào)制-解調(diào)技術(shù)由于信號被調(diào)制到了高頻,可以有效降低電路的低頻噪聲干擾,例如1/f噪聲,這對于高精度電容位移檢測具有不可忽視的作用[10].
基于調(diào)制-解調(diào)的加速度傳感器微弱信號檢測電路原理如圖3所示. 正反向載波(本實驗中約為幾十kHz)加載到電容2個固定極板上,可動極板上的電荷變化通過前置放大器轉(zhuǎn)變?yōu)殡妷海ㄟ^相同載波信號對調(diào)幅的電壓進(jìn)行同步解調(diào),經(jīng)過低通濾波器后的電壓信號即為加速度傳感器開環(huán)輸出.

圖3 基于調(diào)制-解調(diào)的加速度傳感器微弱信號 檢測電路原理
電容檢測部分,學(xué)生動手實現(xiàn)電容定極板和機(jī)械結(jié)構(gòu)部分的集成組裝,并實現(xiàn)電連接. 在此基礎(chǔ)上,教師為學(xué)生提供了電路面包板以及多種電子元器件,學(xué)生根據(jù)原理圖,并通過思考后嘗試搭建電路,實現(xiàn)單個可變電容和2個電容差值的檢測. 學(xué)生自主研究基于運(yùn)算放大器的電路如何實現(xiàn)電容的測量,思考載波(種類、幅值和頻率)、反饋電容等元器件如何影響放大電路的傳遞函數(shù),解調(diào)過程中的相位和濾波帶寬如何影響解調(diào)結(jié)果,觀察單電容測量和差分電容測量的異同,體會差分檢測在提高檢測靈敏度方面的作用.
1.4 加速度傳感器閉環(huán)工作模式
開環(huán)系統(tǒng)的優(yōu)點是結(jié)構(gòu)簡單、易于實現(xiàn),但存在大輸入(導(dǎo)致大位移x)時線性度差和帶寬受限的問題,而且加速度傳感器工作范圍可能受到極板間距的制約. 為克服上述缺陷,加速度傳感器常采用閉環(huán)控制系統(tǒng)的方式工作,通過反饋執(zhí)行機(jī)施加平衡力,抵消外界加速度引起的敏感質(zhì)量塊對平衡位置的偏離,從而確保在正常工作狀態(tài)下敏感質(zhì)量塊保持在平衡位置. 如圖4所示,為了實現(xiàn)閉環(huán)控制,必須對輸出量ΔV進(jìn)行測量,將其作為敏感質(zhì)量塊偏移平衡位置的誤差信號并輸入反饋控制器,反饋控制器根據(jù)控制算法產(chǎn)生控制信號Vout,然后通過反饋放大器使執(zhí)行機(jī)對敏感質(zhì)量塊(被控對象)產(chǎn)生控制作用,直到和外界加速度的作用達(dá)到平衡,消除誤差使得整個系統(tǒng)形成閉環(huán). 在閉環(huán)模式下,控制信號Vout即加速度傳感器的輸出.
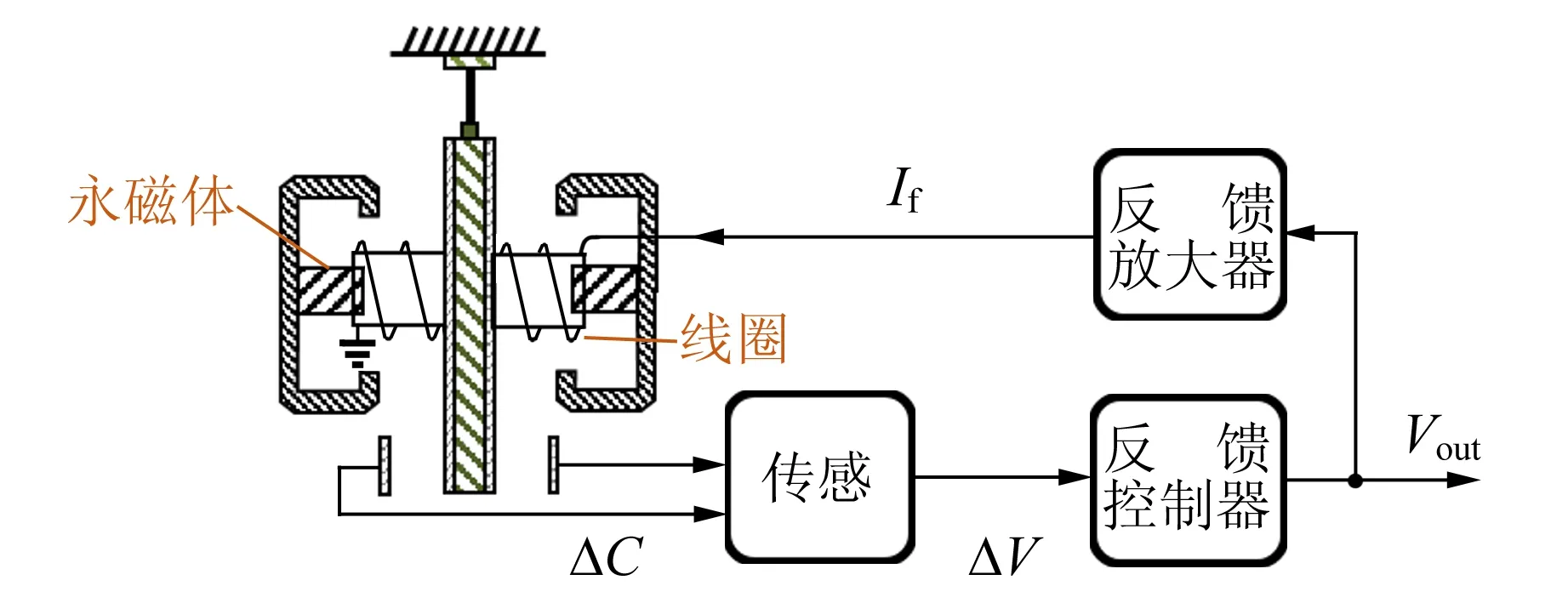
圖4 加速度傳感器閉環(huán)反饋控制
實驗中,執(zhí)行機(jī)采用電磁作用的方式對敏感質(zhì)量塊施加力的作用,通過由永磁體和軟鐵磁材料構(gòu)成的磁路產(chǎn)生磁場,對固連于敏感質(zhì)量塊上的線圈產(chǎn)生作用,作用力的大小與經(jīng)過反饋放大器后的電流If以及磁路在線圈處所產(chǎn)生的磁感應(yīng)強(qiáng)度成正比. 因為閉環(huán)控制狀態(tài)下和敏感質(zhì)量塊固連的電容動極板始終處于平衡位置,因此線性度得到改善;量程主要由執(zhí)行機(jī)施力的能力決定,不受極板間距的制約;而且可以通過選擇反饋控制器,擴(kuò)大加速度傳感器帶寬,一定程度上擺脫了提升靈敏度和擴(kuò)展帶寬之間的相互制約.
該過程中,學(xué)生探索通過反饋控制回路的設(shè)計和參量調(diào)節(jié),實現(xiàn)閉環(huán)工作模式的加速度傳感,并且結(jié)合重力場中的高精度分度裝置和振動臺裝置比較開/閉環(huán)工作模式下,集成好的加速度傳感器在線性度、工作頻段和精度方面的性能異同,并探討問題產(chǎn)生的原因和可能的改進(jìn)方案.
1.5 加速度傳感器輸入-輸出模型和測試方法
加速度傳感器的性能測試和標(biāo)定,可參考國內(nèi)外標(biāo)準(zhǔn)[11-12]. 輸入-輸出模型方程可以反映加速度傳感器的輸出E與輸入a之間的關(guān)系,而對于二者關(guān)系的研究有助于提升傳感器的精度[13-14]. 輸出信號可以有電壓、電流等多種形式. 本實驗采用電壓輸出的形式,單位為V. 對于單軸線加速度傳感器,本實驗使用簡化的加速度傳感器輸出模型,表示為
E=K0+K1a+K2a2+K3a2,
(11)
其中,K0為加速度傳感器的零偏,K1為敏感軸靈敏度系數(shù)(標(biāo)度因數(shù)),K2為敏感軸二階非線性系數(shù),K3為二階非線性系數(shù).學(xué)生可以通過式(11)對重力場中的標(biāo)定數(shù)據(jù)進(jìn)行擬合,得到式中的待定參量,觀察傳感器開/閉環(huán)的對稱性和線性度,并從安裝誤差、寄生電容等角度討論誤差來源.
加速度傳感器測試時,可以使用精密振動臺對加速度傳感器的帶寬和傳遞函數(shù)進(jìn)行測試,也可以使用重力場翻滾法,由精密分度裝置(例如分度頭),提供-g~g(g為當(dāng)?shù)刂亓铀俣龋s為9.8 m/s2)之間精度為10-6g量級的加速度,通過改變加速度傳感器敏感方向,為加速度傳感器提供不同的加速度輸入,從而標(biāo)定加速度傳感器輸入-輸出模型中的各項參量. 學(xué)生在該過程可以了解精密標(biāo)定和測試技術(shù).
2 實驗裝置
實驗裝置如圖5所示,主要包括加速度傳感器、電子元器件、電源、萬用表、LCR表、示波器、鎖相放大器、分度頭以及振動臺等. 精密分度頭和振動臺分別為加速度傳感器靜態(tài)和動態(tài)標(biāo)定測試設(shè)備.
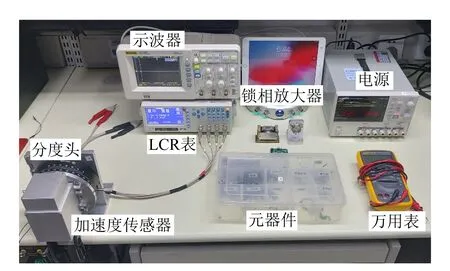
圖5 加速度傳感器實驗裝置
加速度傳感器分為表頭和檢測電路2部分,表頭部分如圖6所示. 加速度傳感器表頭主要由框架、敏感質(zhì)量塊及安裝于其上的動電極、固定電極、簧片等組成,本征頻率約為25 Hz. 加速度傳感器電路及鎖相放大器的連接如圖7所示.

圖6 加速度傳感器表頭
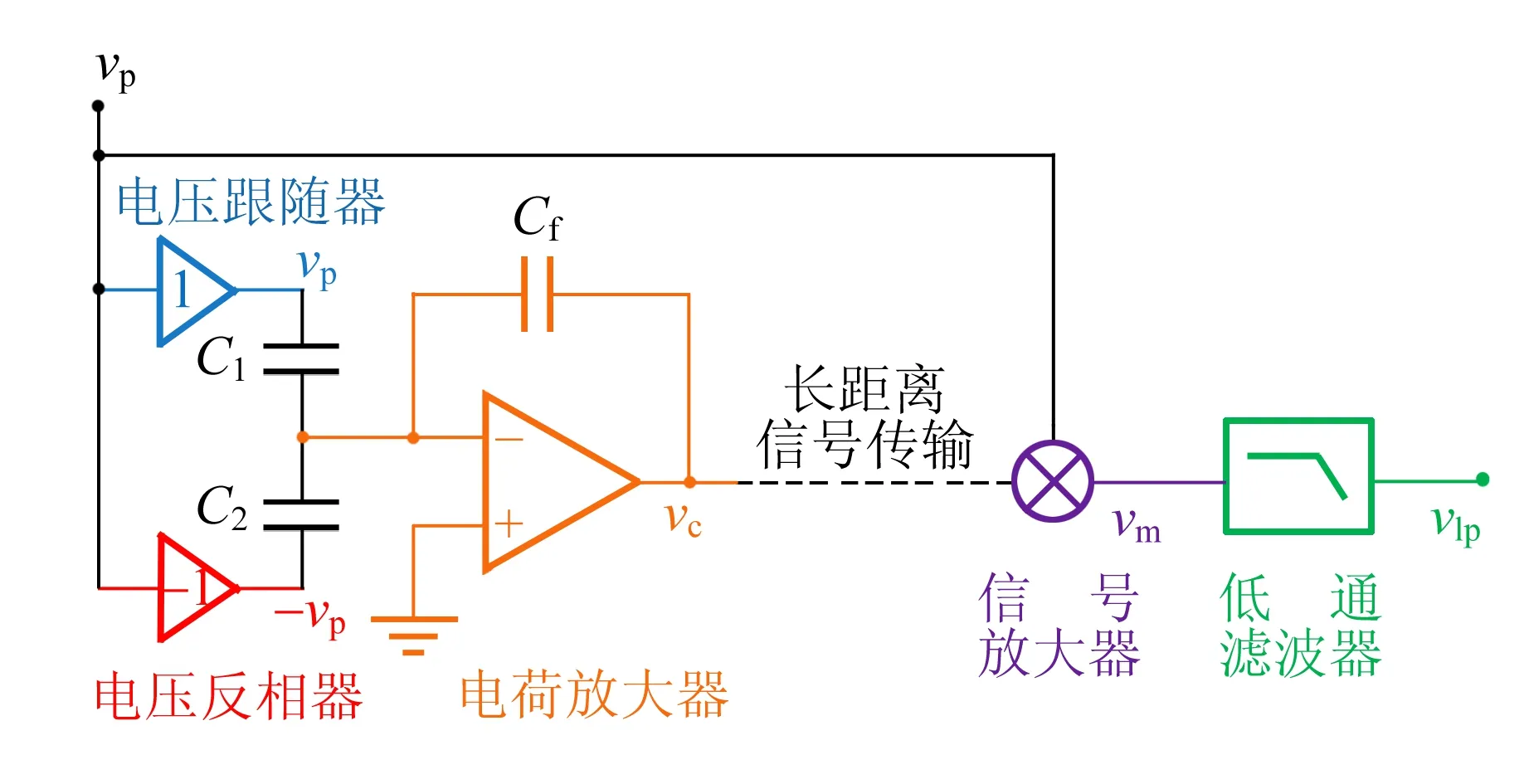
圖7 加速度傳感器電路及鎖相放大器連接方式
前放電路板由用于載波正反向的運(yùn)算放大器和用于電容-電壓轉(zhuǎn)換的電荷放大器組成. PID控制模塊和鎖相放大器由Moku:Lab實現(xiàn)[15],其內(nèi)置載波發(fā)生器、乘法器、調(diào)相器、低通濾波器. 各個模塊的參量可以通過圖形化界面進(jìn)行調(diào)節(jié),并對信號流中關(guān)鍵節(jié)點的波形進(jìn)行觀測.
Moku:Lab產(chǎn)生的載波輸出Vp接入前放電路,前放電路可由學(xué)生借助電路板搭建,或者基于PCB板焊接,差分電容的信號經(jīng)過前放電路放大后,輸出信號重新接入Moku:Lab實現(xiàn)同步解調(diào),最終的輸出信號Vlp即為加速度傳感器開環(huán)模式輸出.
實驗過程中,通過加速度傳感器表頭的拆解和組裝,學(xué)生可以了解電容式加速度傳感器的基本工作原理. 通過在面包板上使用電容、電阻、運(yùn)算放大器等分立器件實現(xiàn)前放電路功能,在此過程中學(xué)生熟悉常用電子元器件的功能和特性,學(xué)習(xí)使用常規(guī)電子測量儀器,初步了解數(shù)字化儀表使用過程中數(shù)模轉(zhuǎn)換時可能面臨的量化噪聲問題,以及儀器配合使用時阻抗匹配問題,重點學(xué)習(xí)調(diào)制-解調(diào)在本實驗中所起到的關(guān)鍵作用. 在此基礎(chǔ)上,利用搭建的電路測量單個可變電容,然后過渡到2個電容差值的測量,并和LCR表的測量結(jié)果進(jìn)行比較,對理論和實驗的異同進(jìn)行討論和驗證. 通過焊接基于PCB板的前放電路,學(xué)生觀察其與基于面包板的前放電路之間的性能差異. 最后,組裝微弱信號檢測電路和加速度傳感器表頭,并測試開環(huán)性能,并通過PID方式實現(xiàn)加速度傳感器的閉環(huán)控制. 完成實驗后,對測試結(jié)果進(jìn)行對比分析和總結(jié),尋找問題和誤差來源,提出并探究可能的機(jī)制以及改進(jìn)方案.
3 實驗結(jié)果及分析
加速度傳感器的靜態(tài)標(biāo)定主要采用重力場多點翻滾方法. 實驗時將加速度傳感器安裝在分度頭上,通過改變加速度傳感器敏感軸相對于重力加速度矢量的方向來改變加速度傳感器各軸的輸入,基本原理如圖8所示.
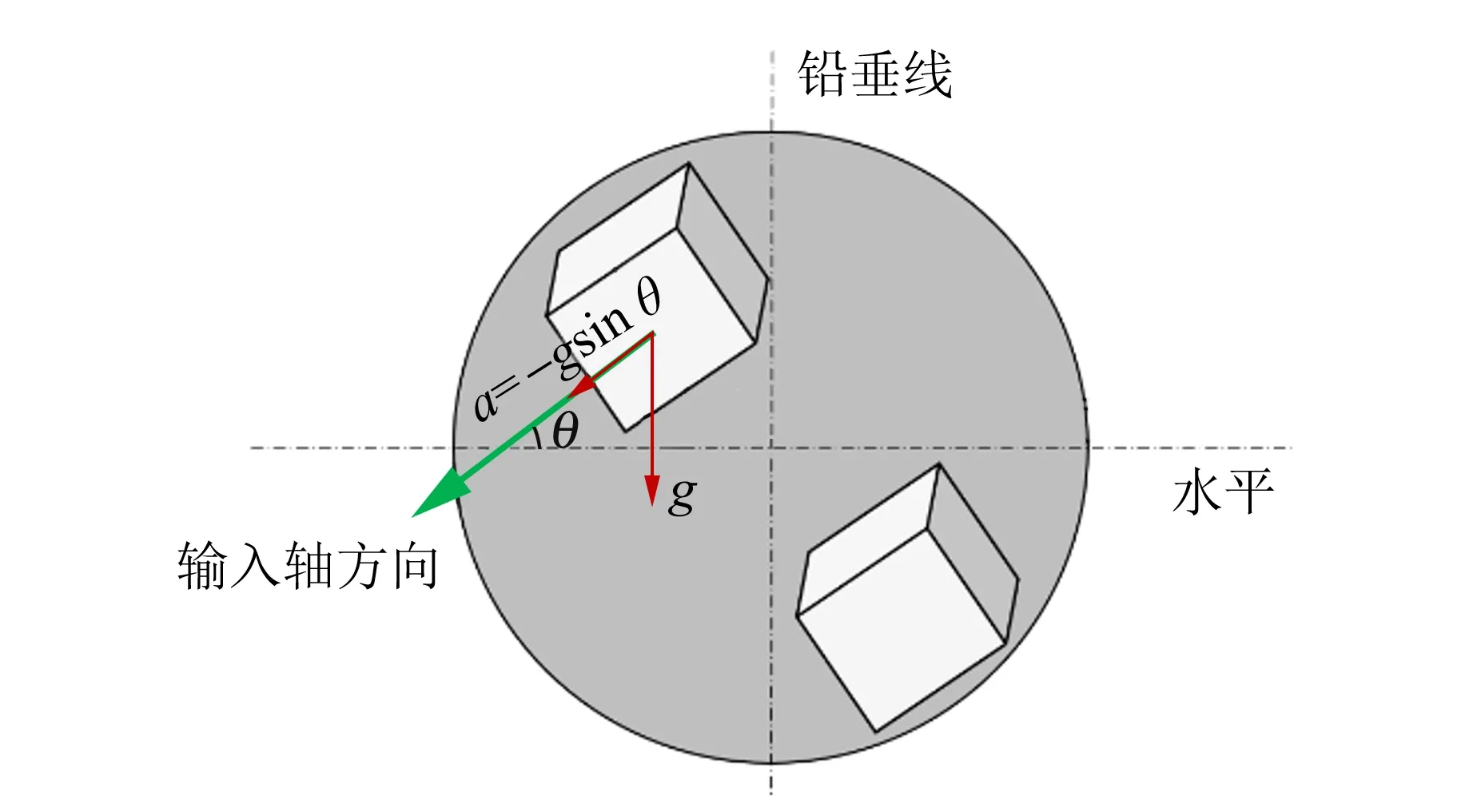
圖8 加速度傳感器重力場靜態(tài)標(biāo)定原理
為使學(xué)生進(jìn)一步理解加速度傳感器的物理模型及非線性特征,將開環(huán)模式的加速度傳感器固定在如圖5所示的分度頭上,通過改變角度,使重力分量變化,并記錄各角度下加速度傳感器的電壓輸出. 實驗結(jié)果如圖9所示,在-0.5g~0.5g范圍內(nèi)表現(xiàn)出一定的線性度. 用最小二乘法進(jìn)行擬合可以得到斜率,即標(biāo)度因數(shù)K1=(-344.4±5.6) mV/g,偏值K0=(-47.9±4.9)×10-3g,線性度為12%.
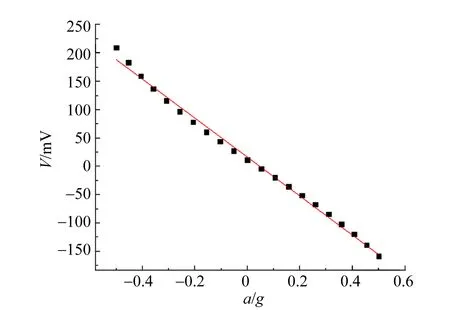
圖9 加速度傳感器開環(huán)工作模式下重力場靜態(tài)標(biāo)定
探究從開環(huán)轉(zhuǎn)變?yōu)殚]環(huán)工作模式后加速度傳感器動態(tài)性能的變化,首先利用重力場中的分度頭在-g~g之間進(jìn)行靜態(tài)標(biāo)定,測試結(jié)果如圖10所示. 得到加速度傳感器的標(biāo)度因數(shù)K1=(-125.5±0.1) mV/g,在-g~g范圍內(nèi)的線性度提升至0.8%,相對于開環(huán)加速度傳感器在-0.5g~0.5g范圍內(nèi)的線性度(12%)有很大提高.

圖10 加速度傳感器閉環(huán)模式下重力場靜態(tài)標(biāo)定
為了測試加速度傳感器對變化加速度輸入的響應(yīng),通過振動臺對開環(huán)和閉環(huán)加速度傳感器進(jìn)行了動態(tài)標(biāo)定. 實驗裝置如圖11所示,測試過程中,被測加速度傳感器安裝在振動臺面上,標(biāo)準(zhǔn)加速度傳感器安裝于同一臺面上;控制器通過功率放大器驅(qū)動振動臺以實現(xiàn)預(yù)期的受控振動.

圖11 加速度傳感器振動臺動態(tài)標(biāo)定實驗裝置
采用對正弦振動進(jìn)行頻率掃描的方式,可以獲得傳感器響應(yīng)幅值隨頻率變化的曲線. 圖12所示為分別在閉環(huán)和開環(huán)工作模式時的幅頻響應(yīng)曲線(幅值進(jìn)行了歸一化). 可以看到,閉環(huán)控制后,加速度傳感器帶寬(幅值相對變化不超過3 dB)從13 Hz(開環(huán)模式)提高至160 Hz.
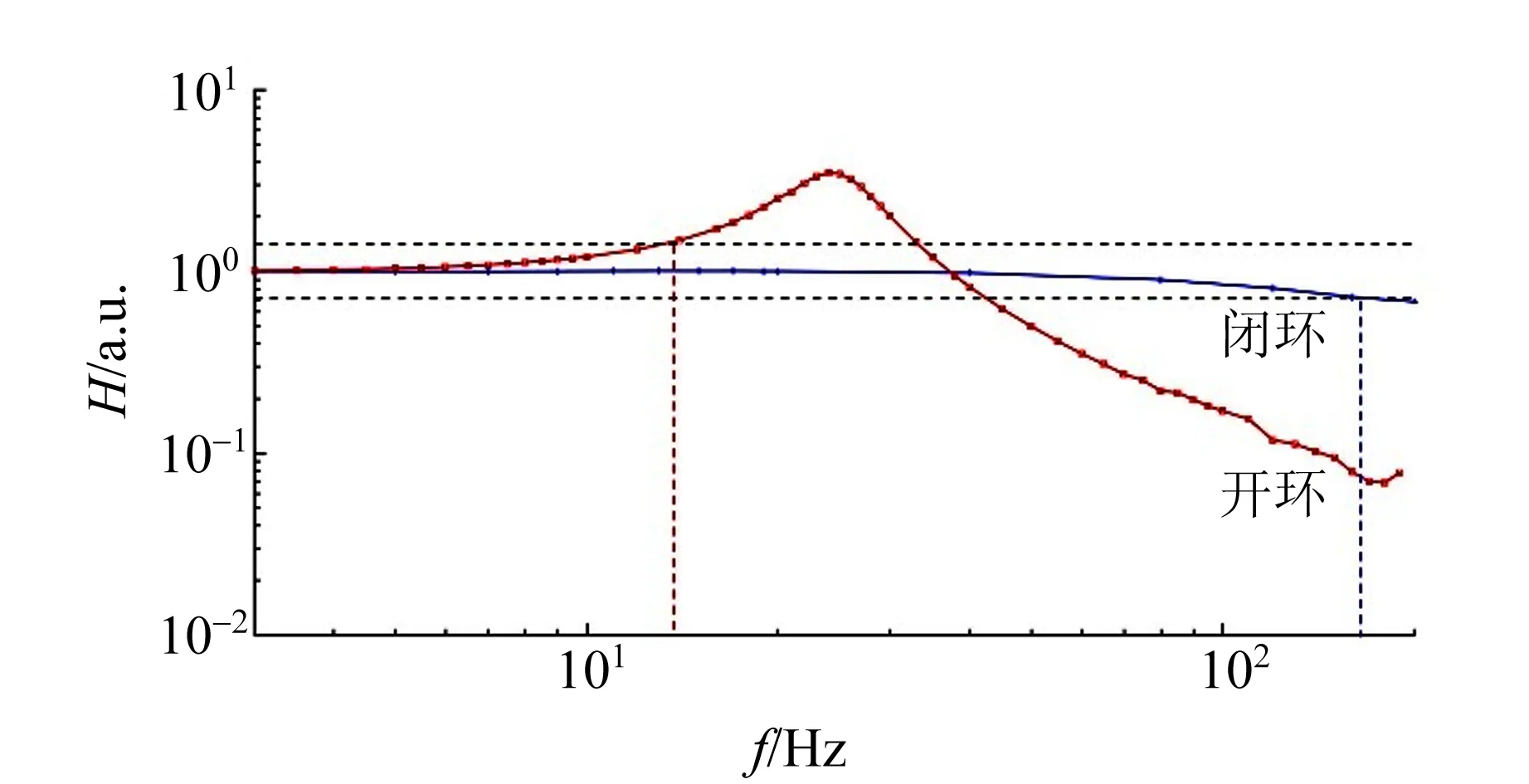
圖12 加速度傳感器開環(huán)及閉環(huán)模式幅頻響應(yīng)曲線對比
4 結(jié)束語
對加速度傳感器的實驗裝置進(jìn)行了介紹,包含傳感器實現(xiàn)和檢測2部分. 首先,介紹了加速度傳感器的基本原理,包括加速度敏感結(jié)構(gòu)、位移-電容檢測、差分檢測、調(diào)制-解調(diào)技術(shù)、閉環(huán)工作原理,并且介紹了加速度傳感器輸出模型和測試方法. 其次,介紹了加速度傳感器實驗裝置,并且通過基于分度頭的重力場靜態(tài)標(biāo)定實驗和基于振動臺的動態(tài)頻率響應(yīng)裝置,對傳感器的標(biāo)定方法進(jìn)行了講解. 實驗結(jié)果表明:使用該實驗裝置,實驗效果明顯. 通過加速度傳感器表頭的組裝、前放電路的搭建、鎖相放大器的功能實現(xiàn),學(xué)生能夠了解開環(huán)和閉環(huán)加速度傳感器的工作原理和特性,并且通過實踐掌握加速度的靜態(tài)和動態(tài)測量方法.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
