帶電作業故障距離識別技術研究
2022-12-07 01:59:34寧夏送變電工程有限公司周宇杰
電力設備管理 2022年22期
關鍵詞:故障
寧夏送變電工程有限公司 周宇杰
近年來,電力設備得到了批量化生產,被廣泛應用到電力系統中,從而導致電力系統內部結構復雜多樣。目前,電力系統輸電距離較遠,規模較大,電壓等級也較高,雖然輸電能力得到了極大的提升,但是也帶來了新的問題,在惡劣的外部環境中輸電線路故障率較高,為了提升電力系統的可靠性和穩定性,需要對其進行檢修和維護,及時檢測出輸電線路運行狀態,以及故障類型和故障位置,采取有效措施對故障進行解除。
為了保持在故障檢測和維修過程中,電力系統仍然能夠保持正常供電,降低電力企業損失,需要在帶電情況下開展故障識別和故障定位,這種檢修方式稱之為帶電作業。帶電作業故障檢修具有一定的危險性,為了促進電力事業發展,相關學者開展對該方面研究,并提出了一些帶電作業故障距離識別技術思路。常用的識別技術主要為基于人工智能的故障距離識別技術,該技術是利用人工智能算法對故障數據進行分析,該技術在實際應用中算法計算過程比較復雜,容易出現計算誤差,從而導致對故障距離識別也存在較大的誤差,已經無法滿足輸電線路帶電作業故障距離識別精度方面需求,為此提出此次課題研究。
1 帶電作業故障距離識別技術設計
此次在識別技術設計過程中應用行波法理論,引入行波法理論對輸電線路故障時域特征進行分析,根據電磁波發射時間信號與反射時間信號確定故障距離。考慮到帶電作業故障識別需求,此次利用電流互感器對輸電線路故障信號進行采集,通過對行波信號處理和分析確定輸電線路運行狀態和故障類別,并以此為依據進行故障距離識別,下文將分別對電流互感器采集故障信號、帶電作業故障分析和識別故障距離三個部分技術進行詳細說明。
1.1 電流互感器采集故障信號
行波法理論是將輸電線路發生故障時所產生的電壓和電流走向作為行波信號,因此在對故障距離進行計算之前,需要獲取到輸電線路故障信號,即故障電路電壓和電流。考慮到該技術需要滿足帶電作業要求,此次采用電流互感器進行非接觸式采集待檢輸電線路的故障數據。為了滿足故障距離識別實際需求,此次選擇的互感器為型號為GUYD電流互感器,該互感器體積較小,線圈采用的是銅芯線圈[1]。電流互感器是將金屬線作為測量導線,將其均勻地纏繞在非磁性材料的框架上形成磁鏈,磁鏈包括內磁鏈和外磁鏈,其用公式表示為:

1.2 帶電作業故障分析
根據采集到的輸電線路運行數據對線路運行狀態和故障類型進行分析,根據行波法原理,含有故障點的輸電線路上的電壓和電流會沿著線路以接近光的速度進行傳播,當到達故障點N時,電流與電壓會發生折射現象與反射現象,將故障點前端的輸電線路設定為線路A,將故障點后端的輸電線路設定為線路B,故障點為線路電壓與電流行波阻抗點,如果在該輸電線路上確實存在故障,根據行波反射與折射原理,可以得到線路A與線路B上電壓行波、電流行波與波阻抗之間的關系,用公式表示為:
公式(2)中,u1表示被測輸電故障點前端線路A的故障電壓行波;u1z表示被測輸電故障點前端線路A的入射電壓行波;u1f表示被測輸電故障點前端線路A的反射電壓行波;i1表示被測輸電故障點前端線路A的故障電流行波;i1z表示被測輸電故障點前端線路A的入射電流行波;i1f表示被測輸電故障點前端線路A的反射電流行波;u2表示被測輸電故障點后端線路B的故障電壓行波;u2z表示被測輸電故障點后端線路B的反射電壓行波;i2表示被測輸電故障點后端線路B的故障電流行波;i2z表示被測輸電故障點后端線路B的反射電流行波[3]。將采集到的輸電線路運行數據代入到上述公式中,如果符合該關系,則判定該輸電線路存在故障[4]。線路A與線路B是被故障點分隔開來的同屬于同一條輸電線路,因此其故障電壓與電流行波具有一致性關系,假設被測輸電線路的行波入射系數為α,被測輸電線路的行波反射系數為β,這兩個系數存在以下關系:

根據公式(2)和公式(3),可以推導出以下結論:
結論1:當故障點前端線路的波阻抗與故障點后端線路的波阻抗相等時,此時被測輸電線路的行波入射系數為1,行波反射系數為0,不存在任何反射波;結論2:當故障點前端線路的波阻抗大于故障點后端線路的波阻抗時,此時被測輸電線路的行波入射系數大于1,行波反射系數大于0,電壓暫態行波在故障點N處發生正反射;結論3:當故障點前端線路的波阻抗小于故障點后端線路的波阻抗時,此時被測輸電線路的行波入射系數小于1,行波反射系數小于0,即入射波小于反射波,電壓暫態行波在故障點N處發生負反射。
基于以上得出結論和實際輸電線路運行數據,對輸電線路故障類型進行分析。輸電線路故障主要為短路和斷路以及金屬性接地故障。如果是短路故障,電流與電壓流經到故障點,受故障影響無法正常傳播,電流與電壓向相反方向傳播,此時形成反射電壓與反射電流,根據結論1可得,反射電流行波與入射電流行波具有同極關系,故障點的電流值是入射電流值的兩倍,電壓值為0[5]。
如果是斷路故障,被測輸電線路的電壓行波與電流行波傳播到斷路點時,受斷路影響故障點后端的波阻抗為零,此時輸電線路反射電壓行波與入射電壓行波相反,根據結論2可得故障點電壓值為零,入射電流行波是反射電流行波的兩倍。如果是金屬性接地故障,被測輸電線路的故障暫態行波傳播到故障點時,受故障影響故障點后端的波阻抗會逐漸增大,根據結論3可得,被測輸電線路入射電流行波與反射電流行波逐漸增大,攝入電壓行波與反射電壓行波會逐漸減小,最后為0。根據以上分析確定故障類型。
1.3 識別故障距離
根據故障初始行波信號達到線路兩端的時間差識別出輸電線路故障距離。根據線路電壓行波與電流行波的反射規律可知,由于輸電線路兩端存在邊界元件,輸電線路電壓行波輸送到故障點時發生反射現象,形成反射行波,反射行波達到輸電線路邊界元件后在此發生反射現象,形成新的反射行波,其傳播過程如圖1所示。
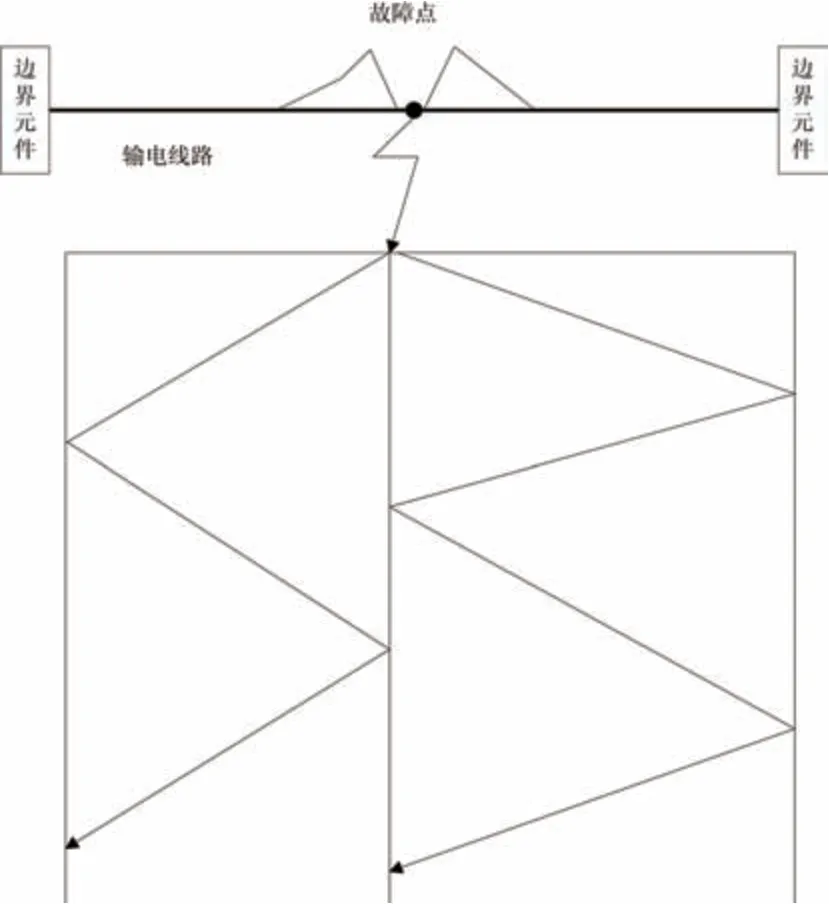
圖1 故障暫態行波傳播圖
如圖1所示,存在故障的輸電線路電壓、電流反射行波與正常行波存在較大的區別,因此可以根據故障暫態行波時域特征識別出故障距離。根據圖1,可得故障點前端線路電壓行波時域:

公式(4)中,Ru表示輸電線路故障電壓暫態行波傳播時間;n表示故障電壓行波經過輸電線路前端邊界元件的反射次數;m表示故障電壓行波經過故障點前端線路入射次數;g表示故障點前端線路的波阻抗;v表示故障點后端線路的波阻抗;e(t)表示故障電壓行波經過輸電線路前端邊界元件多次反射后的反向行波;r(t)表示故障電壓行波經過輸電線路前端邊界元件多次反射后的前向行波;n1表示故障電壓行波經過輸電線路后端邊界元件的反射次數;m1表示故障電壓行波經過故障點的反射次數;k表示故障電壓行波經過多次反射后在故障點透射到的反向電壓行波傳播時間;f表示故障電壓反射行波經過多次反射后在故障點透射到的前向電壓行波傳播時間;q(t)表示故障電流行波經過多次反射后在故障點透射到的反向電流行波傳播時間;h(t)表示故障電流行波經過多次反射后在故障點透射到的前向電流行波傳播時間。將其與正常狀態輸電線路電壓行波傳播時間比較,得出時間差,再根據行波傳播速度可以識別出故障距離,其公式為:

公式(5)中,γ表示輸電線路故障距離;R表示正常狀態輸電線路電壓行波傳播時間;s表示行波在輸電線路上的傳播速度。利用上述公式識別出故障距離,從而實現帶電作業故障距離識別。
2 實驗論證分析
試驗以某高壓輸電線路為實驗對象,該輸電線路長度約10000m,輸電線路存在老化現象,經常發生短路、斷路等故障,試驗利用此次設計技術與傳統技術對其進行帶電作業故障距離識別。試驗中將電流互感器工作電壓設定為220V,動作時間設定為0.15s,信號發射頻率設定為1.23Hz,利用電流互感器采集到故障信號共15.26GB,采集時間為5h。試驗中檢測到輸電線路斷路故障55個,短路故障24個,金屬性接地故障18個,故障距離識別情況如下表所示。

表1 帶電作業故障距離識別情況
試驗共識別80次,每識別10次后統計兩種技術識別誤差,以識別誤差作為檢驗兩種技術可靠性指標,《高壓輸電線路帶電作業故障距離識別技術規范》GB/T16544-2010規定,識別結果最大誤差不能超過0.25m,根據該技術要求對兩種技術進行對比分析,試驗結果見表2。

表2 兩種技術識別誤差對比(m)
從表2中數據可以看出,設計技術平均誤差為0.009m,最大識別誤差僅為0.012m,按照《高壓輸電線路帶電作業故障距離識別技術規范》GB/T16544-2010規定標準,設計技術可以達到其要求;而傳統技術平均誤差為1.136m,最大識別誤差為1.485m,不僅沒有滿足技術規范要求,而且還遠遠高于設計技術,因此試驗證明了在識別精度方面,設計技術優于傳統技術,識別結果與真實情況基本一致,值得被廣泛應用到帶電作業故障距離識別中。
3 結語
本次以行波法理論作為理論依據,結合帶電作業要求,設計了一種新的輸電線路故障識別技術,有效提高了帶電作業故障距離識別精度,能夠真實地反映出輸電線路具體故障信息,能夠為輸電線路故障維修提供準確的數據依據,有效提高輸電線路故障檢測、識別、維修效率,具有良好的現實研究意義。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
