風擾和故障條件下集群無人機強化學習自適應容錯協同控制
2022-12-09 09:25:04余自權程月華張友民
廈門大學學報(自然科學版) 2022年6期
余自權,程月華,張友民,姜 斌*
(1.南京航空航天大學自動化學院,江蘇南京210016;2.加拿大康考迪亞大學機械、工業與航空工程系,蒙特利爾H3G 1M8)
集群無人機逐漸被用于執行廣域監視、資源勘查、森林火情檢測等復雜、危險且耗時的任務[1-3].與單架無人機只能掛載少量特定類型的任務載荷相比,集群無人機可以掛載龐大數量和多種類型的任務載荷.通過將不同任務載荷分配至不同的無人機,集群無人機可以協作完成單架無人機難以完成的任務[4].目前,國內外均已開展集群無人機的相關研究,例如:國內中國電子科技集團電子科學研究院完成的119架(2017)和200架(2018)無人機集群飛行試驗;國外的“小精靈”項目、“低成本無人機集群技術”項目等.集群無人機協同執行任務涉及感知技術、通信技術、計算機技術、控制技術和管理技術,為典型的“感-傳-算-控”系統,屬多學科交叉研究領域[5].在上述技術中,控制技術主要用于確保集群無人機系統協同編隊的穩定性[6].比較典型的協同編隊控制架構包括基于領航-跟隨、行為、虛擬結構和圖論的控制架構[7].基于上述控制架構,神經網絡自適應、滑模、有限時間、勢能場等控制方法被廣泛用于集群無人機的協同控制中[8-9].
集群無人機協同執行任務過程中經常會遭遇陣風、風切變、常值風等外界風擾的影響,給整個集群編隊的安全控制帶來極大的挑戰.此外,集群無人機編隊飛行過程中可能會遭遇致命性和非致命性故障[10].在突遭致命性故障情況下,如何將完全失效無人機從集群編隊中移除而不碰撞鄰近無人機,并且確保通信拓撲變換后的編隊穩定性是亟待解決的關鍵性難題之一.另外一個關鍵性技術難題是當集群無人機遭遇非致命性故障時,如何利用硬件冗余或者容錯控制算法確保故障集群編隊依舊能較好地完成既定任務.在非致命性故障情況下,集群無人機容錯飛行控制算法的設計主要面臨如下挑戰性問題:1) 外界風擾與集群內部故障耦合情況下的容錯協同控制問題;2) 考慮性能強約束需求的集群容錯協同控制問題;3) 機間通信中斷/網絡攻擊下的集群容錯協同控制問題;4) 集群無人機分布式故障診斷與容錯協同控制的集成設計問題;5) 面向故障執行器二次損傷防護的平穩快響容錯協同控制問題;6) 考慮輸入、狀態、輸出約束下的容錯協同控制設計[10].為提升集群無人機編隊遭遇非致命性故障情況下的飛行安全性,基于預設性能函數,Yang等[11]針對多架三自由度無人直升機設計了分布式協同控制策略,確保了無人機編隊在遭遇故障、不確定性和輸入飽和情況下的飛行安全性.Yu等[12]采用分布式滑模估計器與容錯控制分層設計架構,基于神經網絡學習算法、最小參數學習方法和一階滑模微分器設計了集群固定翼無人機有限時間容錯協同控制方案,提升了集群無人機遭遇故障情況下的編隊飛行安全性.Yu等[10]針對集群無人機容錯協同控制研究的歷史及現狀,以及未來可能的研究方向進行了詳細分析,并闡述了目前用于容錯協同控制研究的方法.
作為一種可用于解決強非線性控制問題的強化學習方法,Actor-Critic強化學習方法集成了基于Value的Q-Learning方法和基于Policy的Policy Gradients方法,其中Critic神經網絡用于評估控制行為,Actor神經網絡基于Critic神經網絡評估結果修正控制信號.與四旋翼無人機的運動特性相比,固定翼無人機具有較強的非線性,并且各個控制通道之間存在強耦合特性[13-14].將強化學習機制引入集群固定翼無人機容錯協同控制設計中,可以有效解決風擾、故障、強非線性耦合影響下的容錯協同控制設計難題.最近,越來越多的研究者開始在非線性控制設計中引入強化學習機制,以提升控制方案的學習能力[15-19].Xian等[15]針對遭遇外界干擾與系統不確定性的小型無人機,設計了Actor神經網絡和Critic神經網絡,分別用于估計未建模動態不確定性和跟蹤性能函數,并構建了基于Actor-Critic神經網絡的強化學習魯棒自適應控制策略,確保了無人機的飛行安全.Shi等[16]針對無向通信拓撲下的多航天器姿態編隊控制問題,引入預設性能函數,設計了可在線補償系統不確定性和估計代價函數的Actor-Critic神經網絡強化學習機制,提出了一種航天器智能編隊控制方法,滿足航天器編隊跟蹤性能預設要求.Elhaki等[17]進一步采用基于Actor-Critic神經網絡的強化學習策略,研究存在未建模動態和不確定性的欠驅動自主無人潛航器跟蹤控制問題,提出了基于強化學習機制的魯棒自適應神經網絡控制方法.雖然目前基于強化學習機制的控制研究已取得部分成果,但針對遭遇風擾、故障下的集群固定翼無人機強化學習容錯協同控制研究還較少,亟待進一步研究.
基于上述分析,本文將針對外界風擾與內部故障耦合影響下的集群無人機容錯協同控制問題,結合強化學習機制,研究集群無人機容錯協同控制方法,確保集群無人機在遭遇非致命性故障和風擾情況下可同步跟蹤上參考指令信號.
1 理論基礎
1.1 無人機數學模型
本文研究N架固定翼無人機集群編隊飛行過程中遭遇風擾與執行器故障情況下的容錯協同控制方案,其中,第i架無人機的姿態動力學模型可表示為[20]:
(1)

(2)

進一步地,第i架無人機的姿態角速率運動模型可表示為:
(3)

(4)
其中:Cil0、Cilβ、Cilδa、Cilδr、Cilp、Cilr、Cim0、Cimα、Cimδe、Cimq、Cin0、Cinβ、Cinδa、Cinδr、Cinp和Cinr為氣動力矩系數.
基于式(1)~(3),可得:
(5)
其中:fi11、fi12、fi13、di11、di12和di13具有如下的表達式:
(6)
其中:fi
χ
0、fiγ0、di
χ
和diγ可表示為:
(7)
(8)
將氣動參數表達式(4)帶入角速率式(3),可得:
(9)
(10)
定義xi1=[μi,αi,βi]T、xi2=[pi,qi,ri]T、ui=[δia,δie,δir]T,則可以獲得如下姿態模型:
(11)
其中:fi1=[fi11,fi12,fi13]T,fi2=[fi21,fi22,fi23]T,di1=[di11,di12,di13]T,gi1和gi2的表達式如下:
(12)
(13)
考慮副翼、升降舵、方向舵執行器效率下降和作動偏差故障,則可獲得如下面向控制的故障無人機模型:
(14)
其中:ρi=diag{ρi1,ρi2,ρi3}為效率下降矩陣,bif=[bif1,bif2,bif3]T為有界作動偏差向量,ρiv=1代表第v個執行器未遭遇故障;ρiv∈(0,1)代表第v個執行器遭遇了效率下降故障,v=1, 2, 3分別代表副翼、升降舵、方向舵.
1.2 分數階微積分
將分數階微積分引入整數階系統中可以有效改善控制系統的暫態和穩態性能[21],本文采用下述分數階微積分進行控制器設計[22]:
(15)
其中:a∈(n-1,n]為分數階微積分算子,n∈N.Γ(·)是Gamma函數.
針對微積分定義(15),存在如下等式[23]:
(16)
1.3 神經網絡
本文采用神經網絡設計強化學習算法.神經網絡的結構包括輸入層、隱含層和輸出層,當隱含層的神經元節點數量足夠大時,可以用來逼近強未知非線性函數.神經網絡學習結構可以表示為[24]:
f(z)=wTφ(z)+ε,
(17)
其中:z為神經網絡的輸入向量,w和φ分別代表神經網絡的最優權重矩陣和高斯基函數向量,ε為有界偏差.基函數向量φ中的元素φκ可表示為
(18)
其中:κ=1,2,…,n,n為基函數向量的維度,c和σ分別為基函數輸入信號的中心向量和寬度.
1.4 基本圖論知識
本文采用無向通信拓撲G=(Ω,E,A)描述集群無人機之間的通信關系,其中,Ω={1,2,…,N}為集群無人機集合,E?Ω×Ω為機間通信鏈路集合,A=[aij]N×N為鄰接矩陣.如果(UAV#i,UAV#j)∈E,則說明第j架無人機的狀態信息可以傳輸至第i架無人機,同時有aij>0,否則,aij=0.定義第i架無人機的鄰近無人機集合為Ni={UAV#j|(UAV#i,UAV#j)∈E}.在集群分布式通信架構中,如果對于任意兩架無人機,均存在至少一條通信鏈路,則認為通信拓撲G=(Ω,E,A)是無向聯通圖.

2 強化學習自適應容錯協同控制
本節首先構建分布式分數階同步跟蹤偏差,并在此基礎上利用神經網絡學習機制設計強化學習算法;然后,基于同步跟蹤偏差與強化學習算法,設計集群無人機容錯協同控制器;最后,利用Lyapunov方法對系統的穩定性進行分析.
2.1 控制目標

2.2 分數階跟蹤偏差
將式(14)中的xi1進行二次求導,可得:
(19)

類似文獻[26],定義第i架無人機與近鄰無人機的同步跟蹤偏差為:
(20)
其中:λ1和λ2分別用于調節第i架無人機的跟蹤性能和第i架無人機相對于鄰近無人機的同步性能.
基于同步跟蹤偏差(20),設計如下分數階滑模面:
(21)
其中:λ3和η為正的設計參數,a∈(0,1]為分數階微積分算子.
對式(21)求導,可得:
(22)
2.3 Actor-Critic神經網絡容錯協同控制器設計
本小節采用強化學習中的Actor-Critic神經網絡機制,設計如下智能自適應容錯協同控制信號:
(23)

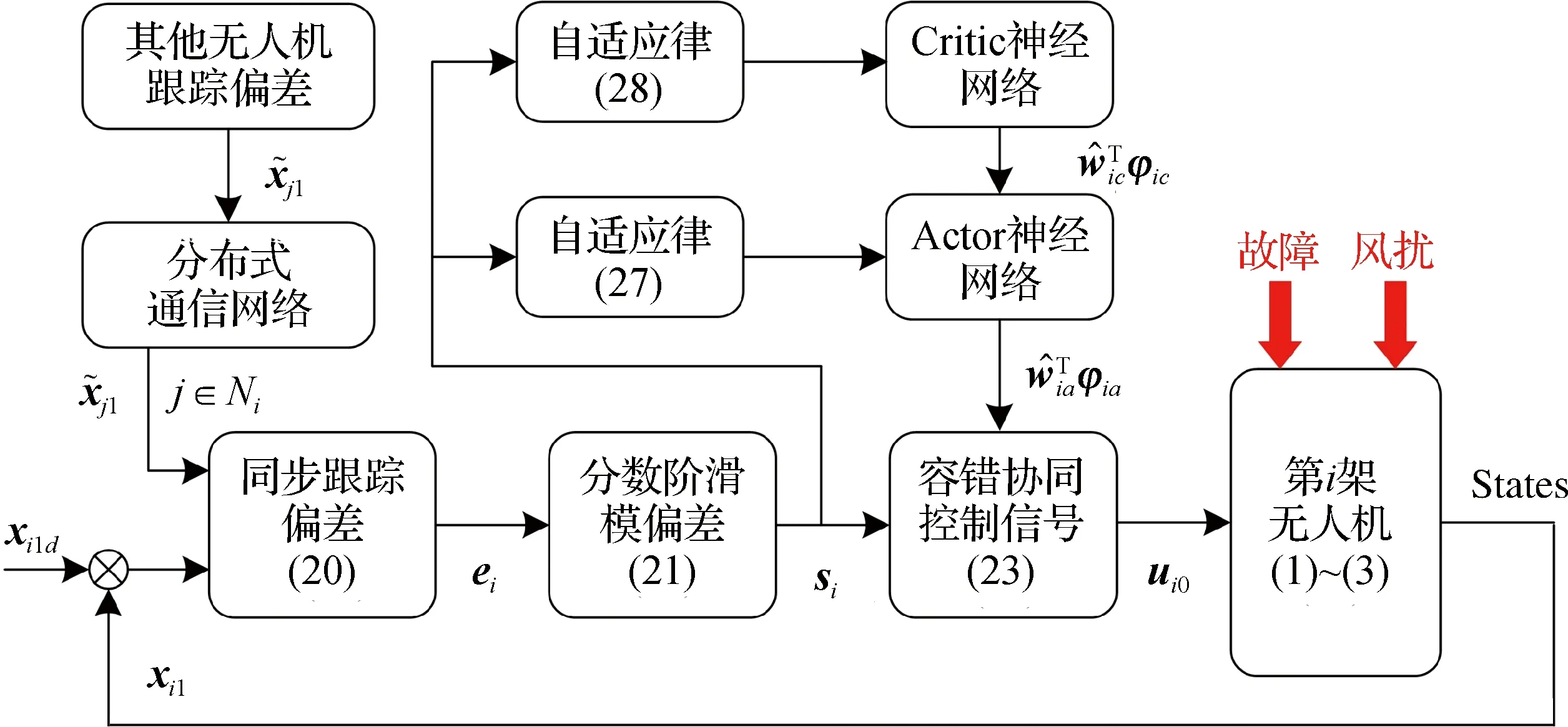
圖1 控制結構Fig.1Control structure
將控制信號(23)代入式(22),則可得:
(24)
借鑒文獻[17],定義如下包含Critic神經網絡的Critic函數:
(25)
上述Critic神經網絡函數的估計值為:
(26)
設計Actor-Critic神經網絡的自適應律如下:
(27)
(28)
其中:κ21、κ22、κ31和κ32為正的設計參數.基于自適應律(27)和(28),Actor-Critic神經網絡組成強化學習單元,并用于調整控制信號(23)的輸出.整體控制框圖如圖1所示.
2.4 穩定性分析
定理1考慮N架固定翼無人機組成的集群編隊,假設機間通信鏈路為無向連通,并且部分無人機遭遇執行器故障,設計同步跟蹤偏差(20)、分數階滑模面(21)、控制信號(23)、Actor-Critic神經網絡自適應律(27)~(28),則所有固定翼無人機均可同步跟蹤上參考指令信號xid,并且同步跟蹤偏差ei最終一致有界.
證明定義如下Lyapunov函數:
(29)
對上式求導,可得:
(30)
進一步,可得:

(31)
定義

(32)
則有
T≤‖si‖·‖εia‖+‖si‖·‖wia‖F·
(33)
(34)
設計自適應律:
(35)
其中:κ41和κ42是正的參數.
將式(33)、(35)代入公式(31),可得:



(36)
利用如下不等式:
(37)
可得:


(38)
進一步利用如下不等式:
(39)
(40)
可得:

(41)
其中:πi1和πi2的表達式為
(42)

3 仿真分析

為檢驗容錯協同控制方案的性能,假設UAV#1~UAV#3分別在t=15 s,t=30 s,t=45 s遭遇如下故障:
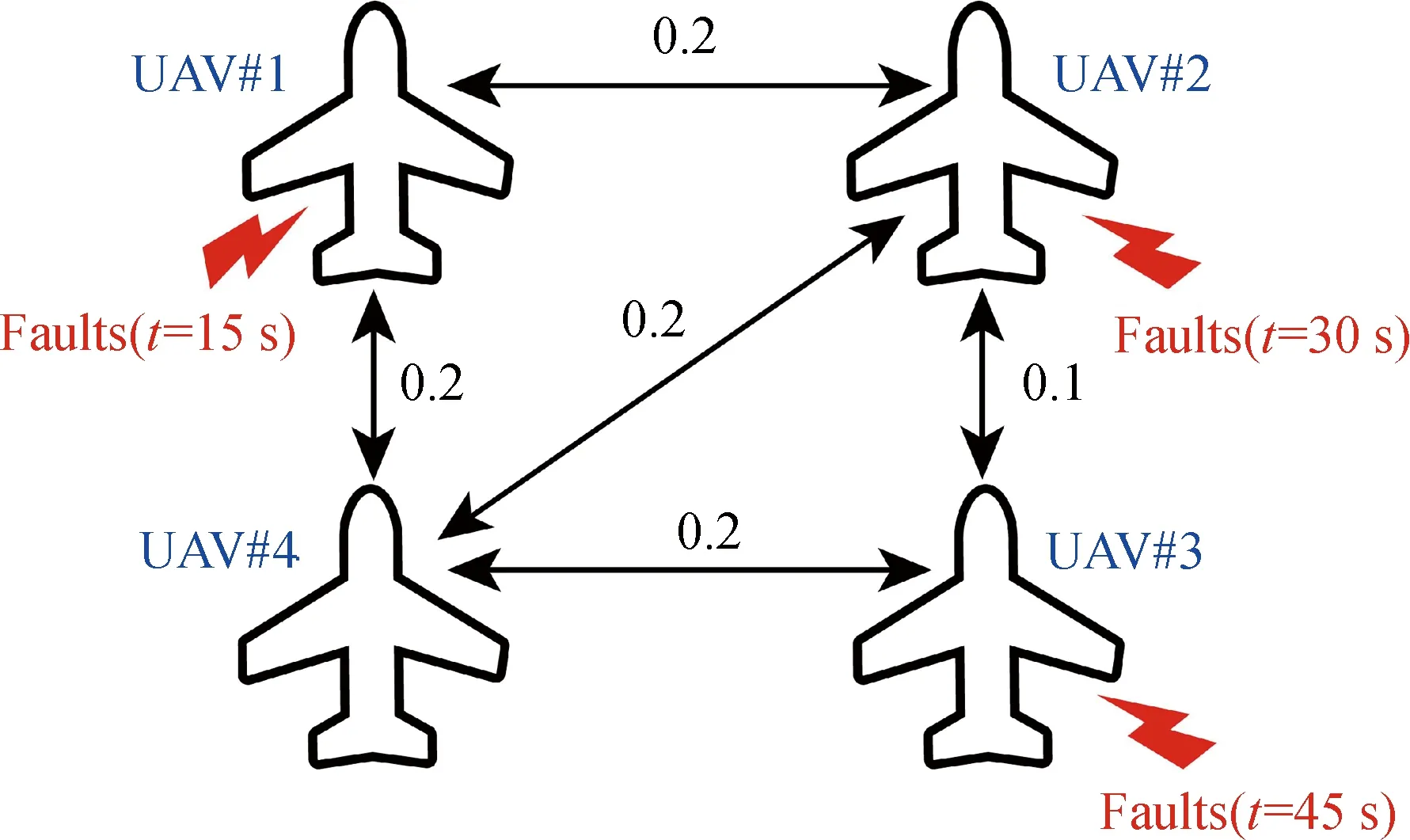
圖2 無人機通信拓撲圖Fig.2Communication topology of UAVs
UAV#1副翼、升降舵、方向舵故障(t≥15 s):
(43)
UAV#2副翼故障(t≥30 s):
(44)
UAV#3升降舵故障(t≥45 s):
(45)
無人機的結構參數和氣動參數取自文獻[29].仿真中的控制參數設為λ1=0.9,λ2=0.2,λ3=1.5,K1=diag{18,27,13},ξi=0.08,κ21=19.6,κ22=2,κ31=48,κ32=2.7,κ41=98,κ42=2.3.
圖3為所有無人機的側滾角、攻角和側滑角響應曲線.從圖3中可以看出,即使UAV#1~UAV#3在t=15,30,45 s時遭遇執行器故障,但在所設計容錯協同控制方案的作用下,所有無人機的姿態均保持有界.圖4為所有無人機的角速率響應曲線.從圖中可以觀察到,當無人機遭遇故障時,角速率信號出現了瞬態變化,但在控制方案的作用下,角速率信號很快穩定下來,從而確保了集群編隊系統的穩定性.
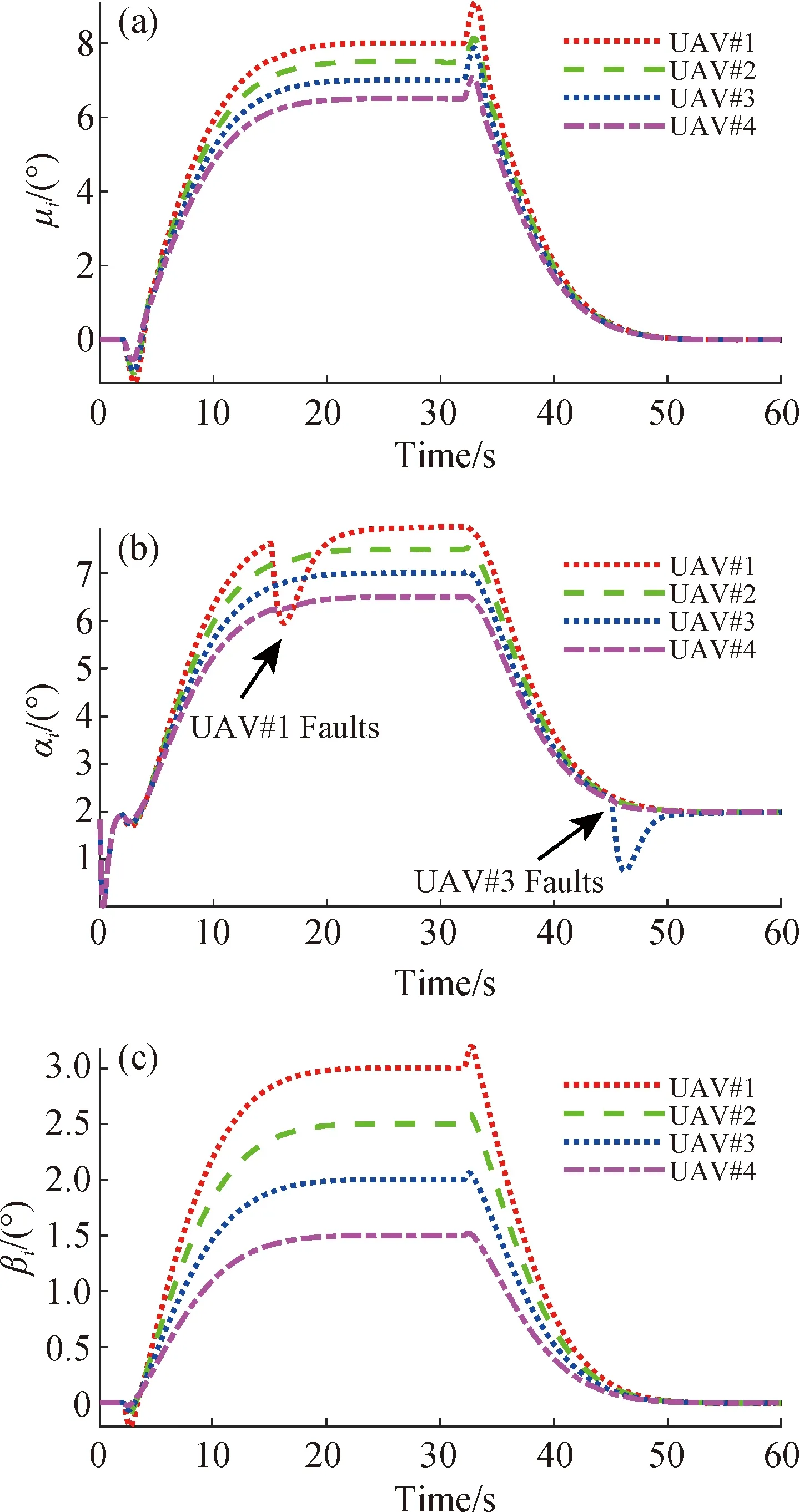
圖3 無人機姿態角響應曲線Fig.3Time responses UAVs′ attitudes
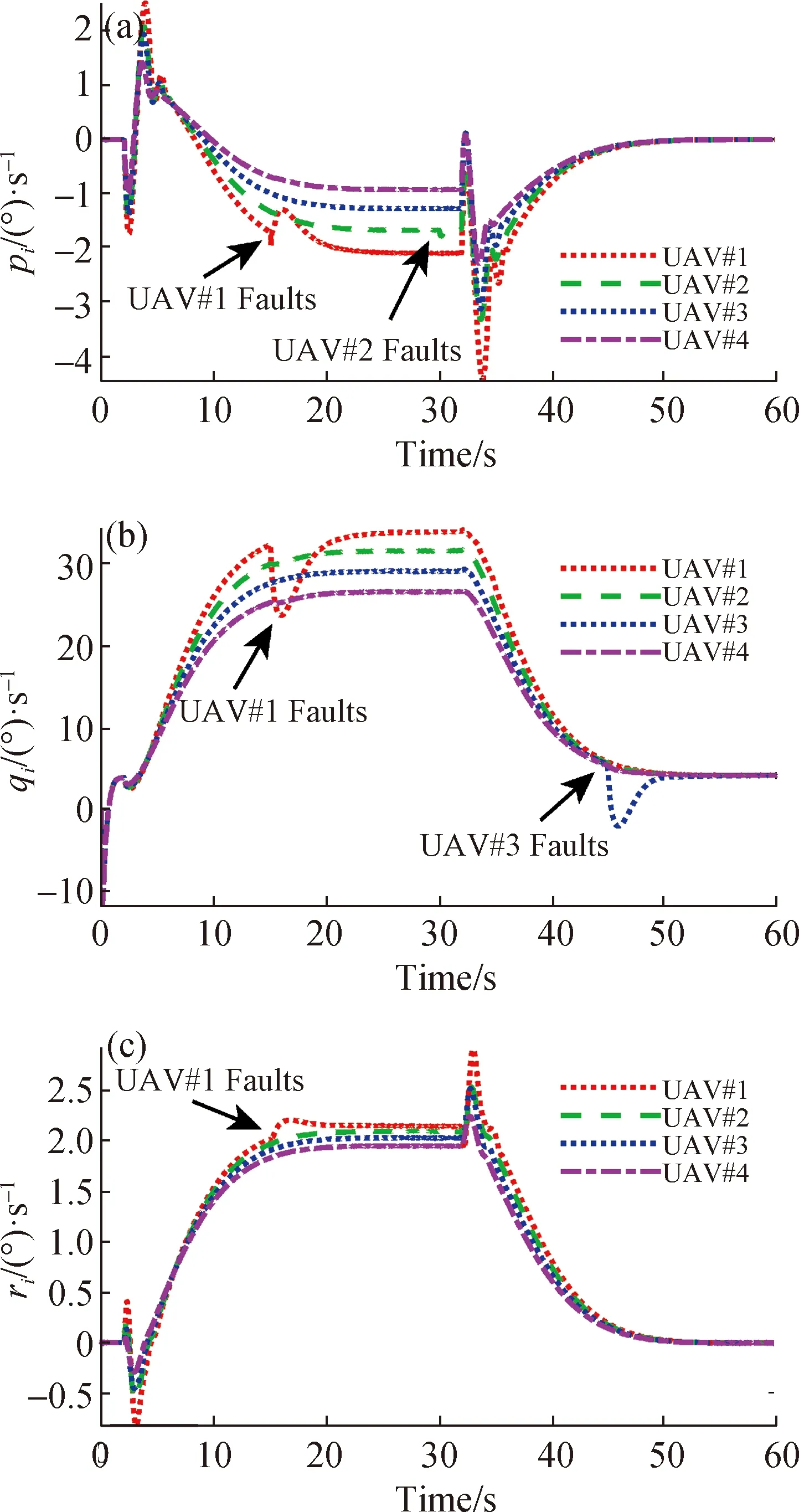
圖4 無人機角速率響應曲線Fig.4Time response of UAVs′ rates
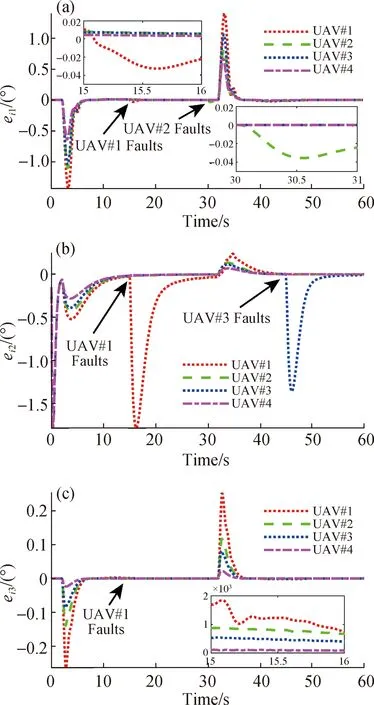
圖5 無人機姿態同步跟蹤偏差Fig.5Attitude synchronization tracking errors of all UAVs
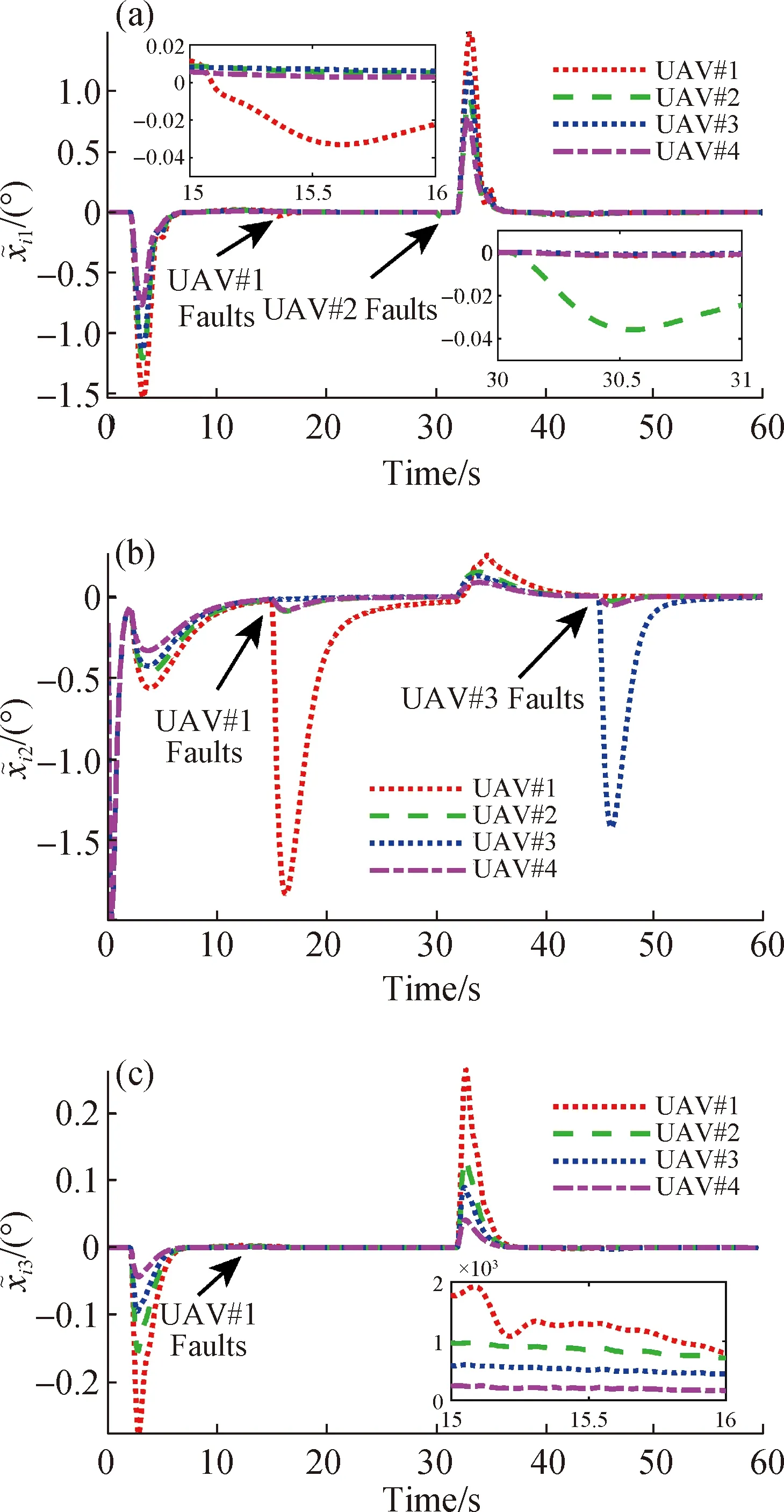
圖6 無人機個體姿態跟蹤偏差Fig.6Individual attitude tracking errors of all UAVs
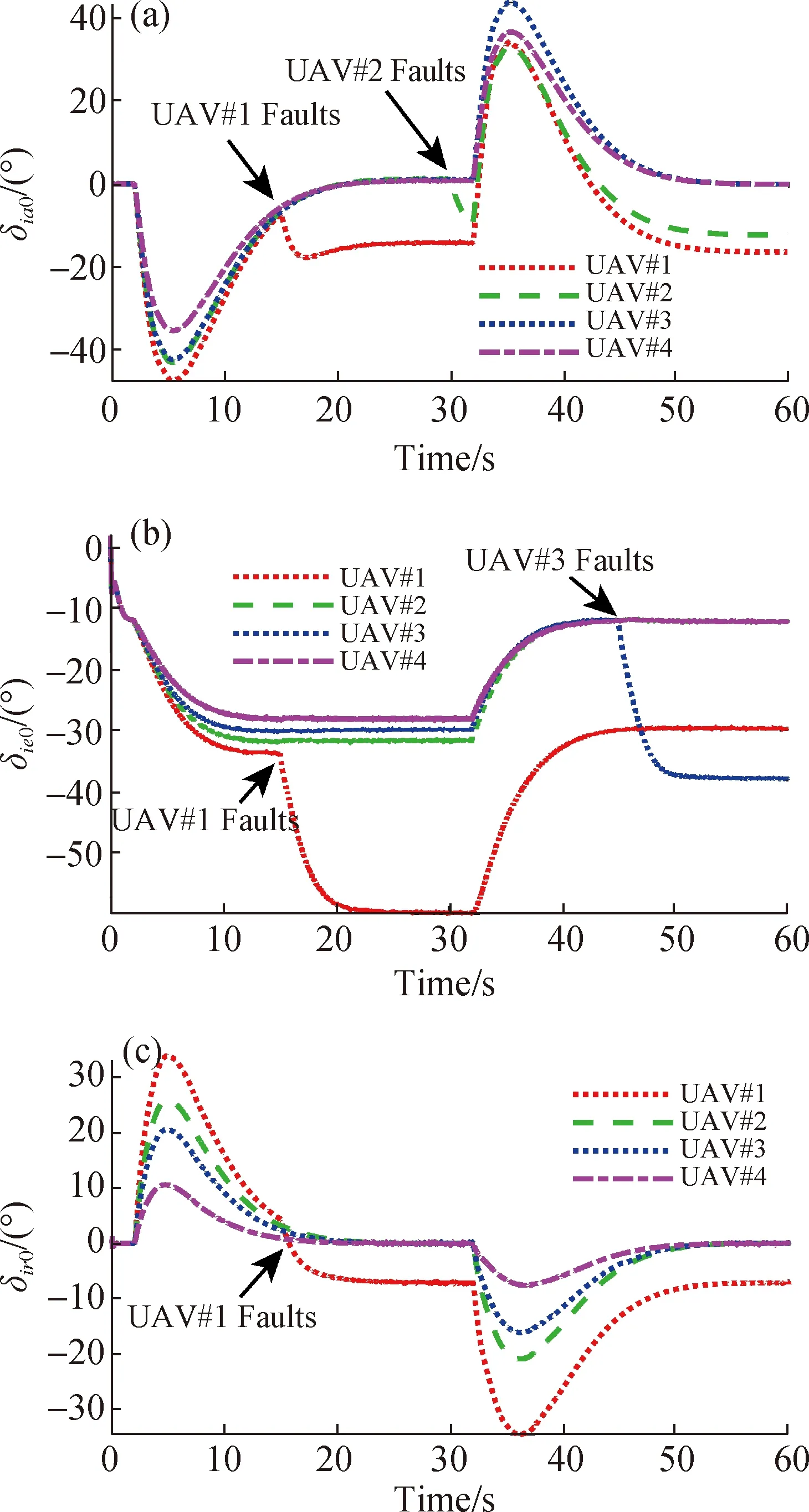
圖7 無人機控制輸入信號Fig.7Control input signals of all UAVs
4 結 論
本文針對風擾和故障條件下的集群無人機容錯控制問題,基于Actor-Critic神經網絡強化學習機制,設計了分數階強化學習容錯協同控制方案.首先,構建了可同時反映個體跟蹤性能與同步性能的同步跟蹤偏差,并引入了分數階微積分算子,形成分數階偏差變量;其次,基于Actor神經網絡設計了智能自適應容錯協同控制信號;再次,設計Actor-Critic神經網絡自適應律,激活強化學習算法的學習能力;然后,結合Lyapunov穩定性理論證明所有無人機的姿態同步跟蹤偏差均收斂至含零的很小區域內;最后,數值仿真結果驗證了所設計的強化學習容錯協同控制方案的有效性.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34