奈奎斯特判據在時滯對象自抗擾控制中的應用
2022-12-09 09:25:50金輝宇蘭維瑤李智斌
廈門大學學報(自然科學版) 2022年6期
金輝宇,倪 剛,蘭維瑤,李智斌
(1.廈門大學航空航天學院,福建廈門361102;2.新華三技術有限公司,浙江杭州310051;3.山東科技大學電氣與自動化工程學院,山東青島266510)
2022年是廈門大學控制科學與工程學科成立50周年,也是奈奎斯特發表文獻[1]90周年.該文提出了基于頻率響應分析反饋系統穩定性的圖形化判據,該判據為控制系統的分析和設計提供了新方法,標志著頻域方法的成熟和古典控制時期的到來.此后,這一判據被稱作奈奎斯特判據,成為古典控制的核心內容,在自動控制的理論研究、工程實踐和教學中發揮著重要作用.而文獻[1]也入選控制理論歷史上最重要的25篇文獻,并因為發表時間而位居第一[2].
然而,20世紀60年代現代控制理論興起后,整個古典控制不再時髦,甚至被誤解為簡單、過時.奈奎斯特判據也就隨之被冷落,在教學和科研中的地位不斷降低.目前,國內通常僅在本科階段學習奈奎斯特判據,研究生階段不再系統講述,轉而強調狀態空間方法.這就導致作為科研主力的研究生們總體上不熟悉奈奎斯特判據,難以用它解決面對的科研問題.而這又進一步加劇了“簡單、過時”的誤解,甚至還要加上“無用”.奈奎斯特判據陷入了“被誤解—不被重視—難以應用—誤解加深”的正反饋,其研究日漸衰微.
與狀態空間方法相比,奈奎斯特判據有其獨特的優勢.它巧妙地平衡了數學嚴謹和工程直觀.它以復變函數理論為基石,充分嚴謹,常常能得到穩定性的充要條件;它以圖形為主要分析手段,足夠直觀,便于工程技術人員接受.它一般不需要繁雜的數學運算,過程簡潔明了,特別適合研究低階單輸入單輸出對象.
為體現奈奎斯特判據的優勢,本文用它研究時滯對象的自抗擾控制(active disturbance rejection control,ADRC).ADRC是韓京清研究員[3-5]提出的一種通用控制技術.它汲取了PID控制的思想精華,具有結構簡單、調參方便、魯棒性好、適用面廣等優點.它以“內擾”來描述對象的不確定性,并將內擾和外擾歸結為總擾動,再構造擴張狀態觀測器(extended state observer,ESO)實時估計總擾動,最后用反饋予以補償,從而實現“自抗擾”.由于統一處理內、外擾,ADRC不依賴對象的數學模型,在克服對象不確定性和抑制外擾方面具有獨特的優勢.21世紀以來,ADRC蓬勃發展,在工業過程、伺服系統、汽車工業和航空航天等領域不斷取得成功應用[6-7].受應用研究的激勵,ADRC的理論研究也日趨活躍,成為當時一個熱點[8-10].
在工業過程領域,由于存在傳輸時滯、容積時滯、測量時滯等因素,被控對象常常是時滯對象.ADRC高度重視時滯對象,發展出無視時滯法、階次提高法、時滯預估法等若干種控制時滯對象的方法,在工程實際中取得了良好的效果[11-12].但時滯對象ADRC的理論研究相對滯后,直到近年才找到若干穩定性條件[13-14].目前,時滯對象ADRC穩定性研究的主要工具是時滯常微分方程穩定性理論,這一時域方法可以得到嚴格、精巧的理論結果,但存在理論艱深、學習困難的缺點.
本文用奈奎斯特判據重新研究了一階時滯對象在ADRC下的穩定性.所研究問題的特點是,對象不穩定或臨界穩定,ADRC中采用降階ESO.這兩點增加了問題的難度,一度被認為難以用傳遞函數方法研究[14].本文先進行框圖化簡,將原問題分母中的超越函數項分離出來,成為時滯對象反饋控制的標準形式.再分情況繪制奈奎斯特圖分析穩定性,得到了與文獻[14]一致的充要條件.這表明,奈奎斯特判據是研究ADRC的有力工具.
1 奈奎斯特判據簡介
考慮圖1(a)所示的反饋控制系統,其中r與y分別參考信號與輸出,G(s)與F(s)分別是前向通道和反饋通道的傳遞函數.該系統的穩定性取決于特征方程
1+G(s)F(s)=0
(1)
根的位置.當且僅當所有的根都在開左半平面(left-half-plane,LHP)時,系統是穩定的.

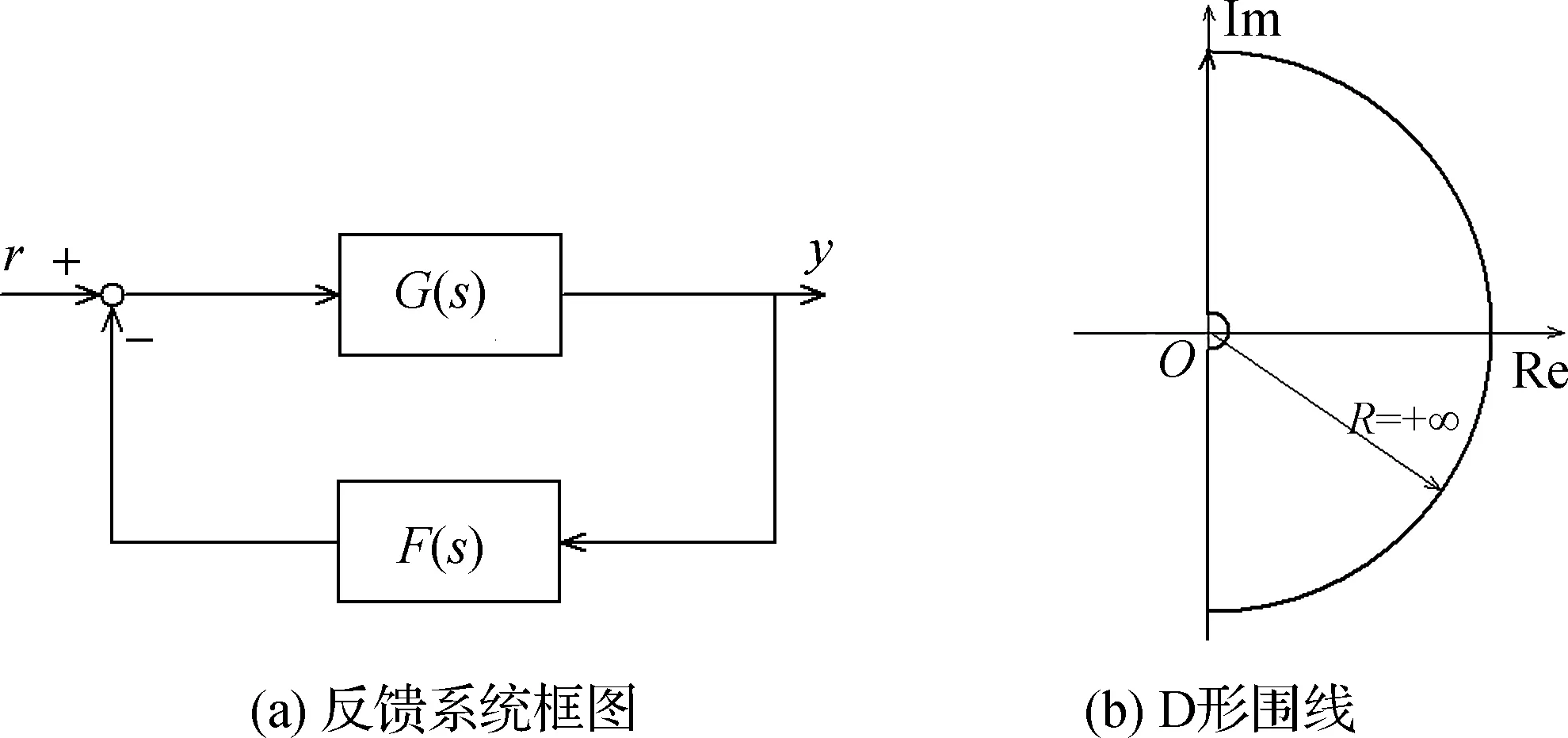
圖1 反饋系統和D形圍線Fig.1Feedback system and D contour
假定奈奎斯特曲線順時針N次包圍點-1+i0,而G(s)F(s)在右半平面有P個極點.奈奎斯特判據斷言,方程(1)的全部根中,不在LHP的根有Z=N+P個.顯然,當且僅當Z=0時,反饋系統穩定.
奈奎斯特判據適用于時滯對象[15].其詳細介紹和繪圖細節可見文獻[16-17].
2 理論結果
2.1 問題描述
設有一階時滯對象

(2)
其中,u和x分別是對象的輸入與輸出,d是外部擾動,常數L,b,τ的數值已知,且滿足L≥0,b,τ>0.控制器設計的目標是跟蹤參考信號r.典型的r是一個階躍信號.
為實現這一目標,文獻[14]設計了降階ESO
(3)
和控制器
(4)
問題是分析由式(2)~(4)組成的一階LADRC系統的穩定性.
注1式(3)被稱作降階ESO的原因是它的微分方程只有一階,而一般針對式(2)設計的ESO為兩階.
2.2 框圖及其簡化
線性自抗擾控制(LADRC)系統(2)~(4)有框圖如圖2[14]所示,其中
(5)
(6)
(7)
由于控制器C(s)的分母是超越函數,其穩定性分析被認為是一個難題.
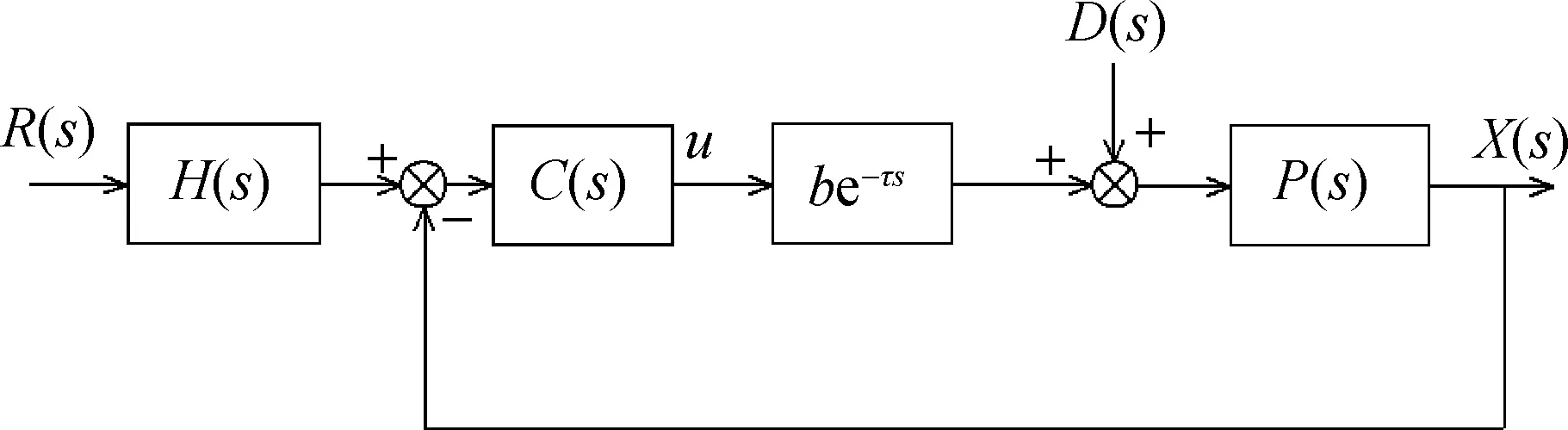
圖2 LADRC系統(2)~(4)的框圖[14]Fig.2Block diagram of LADRC system (2)~(4)[14]
現在化簡圖2.由于外擾不影響線性時不變(linear time-invariant,LTI)系統的穩定性,將D(s)刪去.考慮到圖3所示模塊有傳遞函數
(8)
則圖2可以化簡為圖4(e),中間過程見圖4(a)~(d).
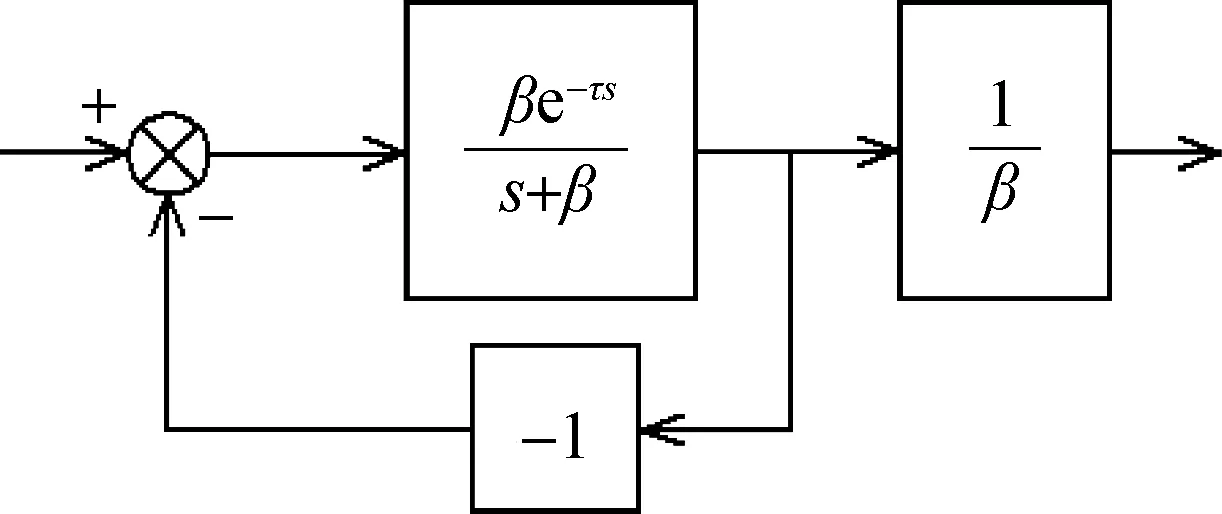
圖3 一個具有傳遞函數(8)的模塊Fig.3A block with transfer function (8)

圖4 化簡圖2結果Fig.4Simplification of Figure 2
2.3 增益穿越頻率
圖4(e)中的反饋回路有傳遞函數
(9)
其特征方程為
(s+β)(s-L)+(ks+kβ+βL)e-τs=0.
(10)
注意到式(10)也是圖2的特征方程,這再次表明圖2和圖4(e)的穩定性相同.
引理1假設k,β>0,考慮式(9)和方程
|W(iω)|=1.
(11)
方程(11)有4個根,其中有且僅有一個正實根
ωc=
(12)
證明方程(11)可以改寫為
兩邊平方后得
ω4+(β2+L2-k2)ω2-(k2β2+2kβ2L)=0.
它有兩個實根ω1,2=±ωc和兩個虛根,其中有且僅有ωc是正實根.
引理1表明,當s從原點出發運動到+i∞的過程中,僅在ωc處穿越單位圓一次.在古典控制中,ωc被稱作增益穿越頻率,它是用奈奎斯特圖分析穩定性時的一個關鍵參數.
證明由式(9),有

2.4 穩定性條件
現在建立穩定性條件.
定理1考慮由式(2)~(4)組成的一階LADRC系統,假定k+β>L.記時滯上界
τ*=
(13)
該LADRC系統穩定的充要條件是時滯τ<τ*.
證明分別考慮L=0和L>0兩種情況.L=0時,式(9)簡化為
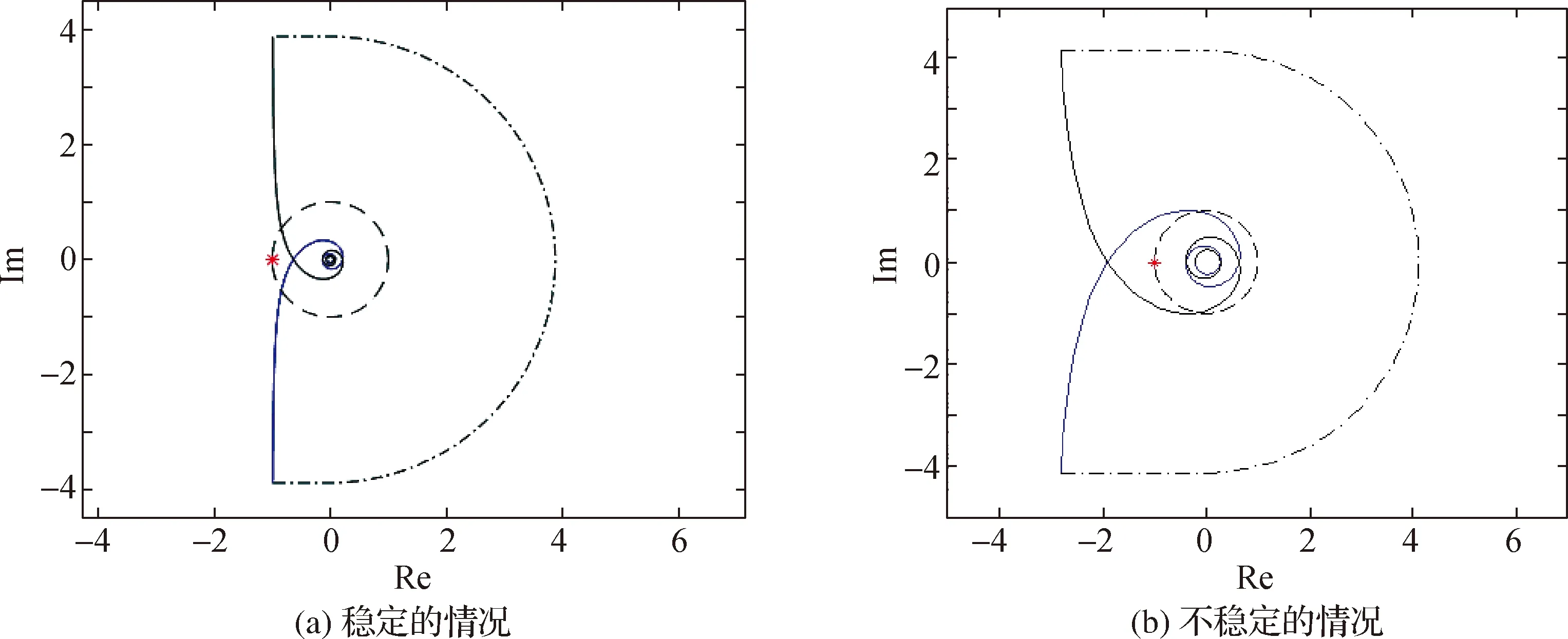
圖5 L=0時W(s)的奈奎斯特圖Fig.5Nyquist diagram of W(s) when L=0
下面證明不包圍點-1的充要條件就是τ<τ*.分析W(s)的奈奎斯特曲線,當ω=0+時,W(iω)在-i∞附近;隨著ω的增加,在ω=ωc處穿越單位圓;此后保持在單位圓內.當且僅當τ<τ*時,有
(14)
由引理2,W(s)的奈奎斯特曲線在第二象限穿入單位圓.此時整個奈奎斯特圖不包圍-1點,如圖5(a)所示,其中藍色實線是s從i0+出發運動到+i∞的曲線,黑色實線是s從-i∞沿負虛軸運動到i0-的曲線,而點劃線大半圓是圖1(b)中D形圍道繞開原點的那一段小半圓生成的.
而當τ≥τ*時,式(14)不成立,系統不是穩定的.圖5(b)是一個不穩定的例子,W(s)的奈奎斯特曲線順時針包圍點-1一次.
當L>0時,W(s)在原點無極點,D形圍道不需要繞開原點.同時W(s)在右半平面有一個極點,由奈奎斯特判據,系統穩定當且僅當奈奎斯特曲線逆時針包圍點-1一次.
W(iωc)>-π
(15)
時,奈奎斯特曲線在第二象限穿入單位圓,逆時針包圍-1點一次,如圖6(a)所示.其中藍線是從外向內穿入單位圓,而黑線是從內向外穿出單位圓.如果不等式(15)不成立,ADRC系統不是穩定的.圖6(b)是一個不穩定的例子,奈奎斯特曲線順時針包圍點-1一次.
而不等式(15)成立的充要條件就是τ<τ*.因為
-∠(iωc-L)=-π+∠(iωc+L),
而
∠W(iωc)=∠(ikωc+kβ+βL)-∠(iωc+β)-
∠(iωc-L)-τωc,
于是不等式(15)等價于
τωc<∠(ikωc+kβ+βL)-∠(iωc+β)+
∠(iωc+L).
而由于
∠(ikωc+kβ+βL)-∠(iωc+β)+∠(iωc+L)=
∠(ikωc+kβ+βL)(iωc+L)(-iωc+β)=
ωcτ*,
當且僅當τ<τ*時,不等式(15)成立.
綜合L=0和L>0兩種情況,定理1得證.
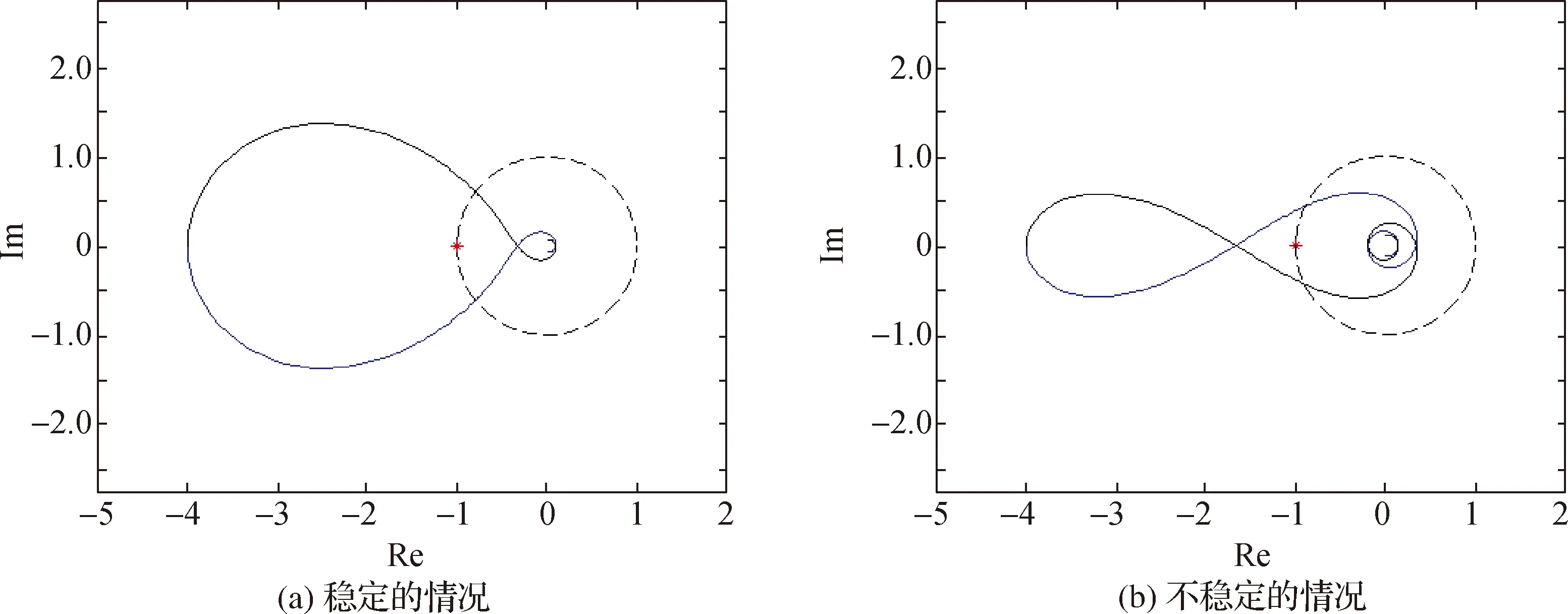
圖6 L>0時W(s)的奈奎斯特圖Fig.6Nyquist diagram of W(s) when L>0
3 討論與算例
3.1 與文獻[14]的比較
定理1得到的時滯上界和文獻[14]一致,這表明了奈奎斯特判據的有效性.但定理1和文獻[14]存在若干差別,在此進行比較.
從方法看,本文的主要方法是奈奎斯特判據,文獻[14]的主要方法是時滯微分方程的穩定性理論.兩種方法都能得到正確的結果,但奈奎斯特判據為自動化背景的研究人員所熟悉,數學專業的未必熟悉;時滯微分方程理論則相反,為數學背景的研究人員所熟悉,但自動化專業的常不熟悉.
從證明過程看,本文需要分別討論L=0和L>0兩種情況,不如文獻[14]數學上簡潔.但從工程的角度,L=0意味著對象臨界穩定且包含一個積分器,而L>0意味著對象不穩定且不包含積分器,兩者的差別明顯而重要.因此,分情況討論在工程上是合理的.
從結果來看,本文沒有對外擾d作假設,而文獻[14]假設d的極限存在且為一個有界常數.這一假設對于穩定性無必要,因為對象和ADRC都是LTI的,整個LADRC系統也是LTI的,而LTI系統的穩定性與外擾無關.這個假設是為了保證d能被完全兌消.
3.2 算例
本節通過兩個算例說明定理1.
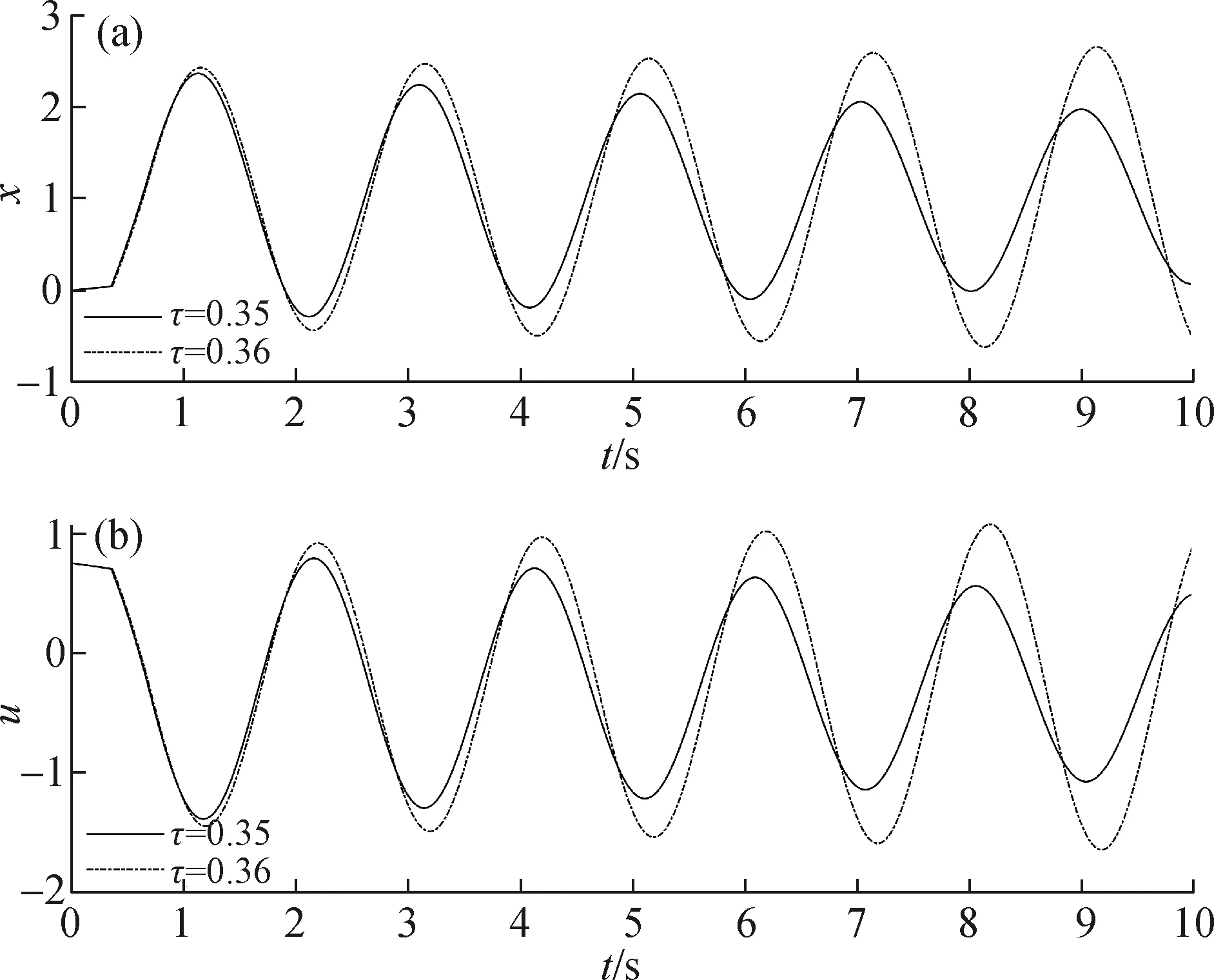
圖7 例1的輸出x(a)和控制u(b)Fig.7The output x(a) and control u(b) of example 1
例2仍取L=1,b=4,β=2,k=3.令τ=0.15,外擾取d1(t)=0.1·1(t)和d2(t)=0.1sin(2t)·1(t).用MATLAB數值求解方程(2)~(4),結果如圖8.從圖8中可以看到,兩種情況系統都是穩定的,差別在于,d1(t)完全被兌消,而d2(t)沒有被完全兌消,導致x和u在暫態結束以后仍存在振蕩分量.
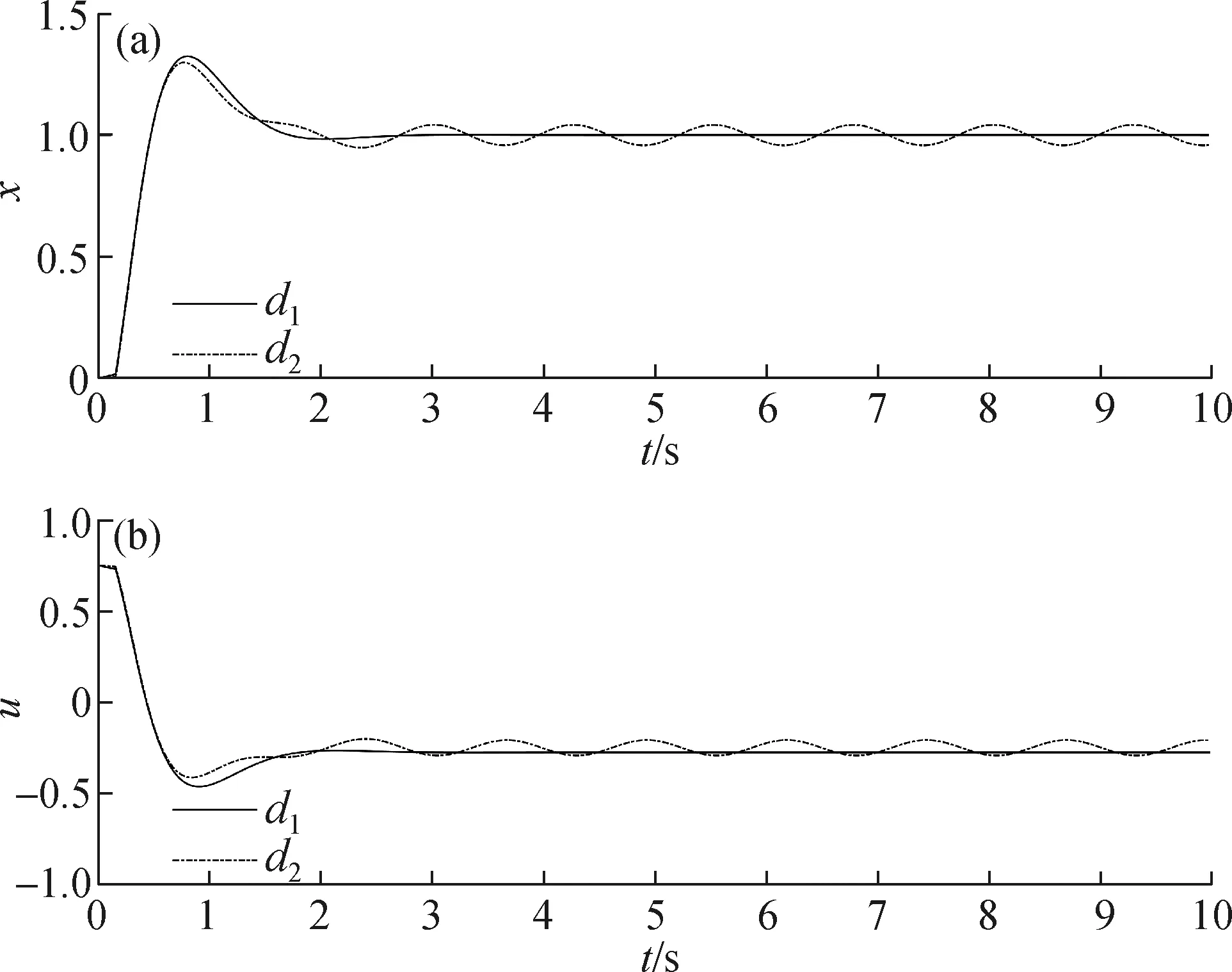
圖8 例2的輸出x(a)和控制u(b)Fig.8The output x(a) and control u(b) of example 2
4 結 論
本文以奈奎斯特判據研究時滯對象自抗擾控制的穩定性,得到了和文獻[14]定理1一致的充要條件,并且放松了對外擾的要求.這表明,奈奎斯特判據并未過時,仍可以在控制理論的前沿研究發揮作用.為更好地發揮其作用,有必要加強奈奎斯特判據和整個古典控制理論的教學,尤其是研究生階段的教學.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
科技傳播(2019年22期)2020-01-14 03:06:54