常規高超聲速風洞級間動態分離裝置設計與應用
2022-12-09 08:59:12何超孫鵬林敬周許曉斌陳磊
實驗流體力學 2022年5期
關鍵詞:模型
何超,孫鵬,林敬周,許曉斌,陳磊
中國空氣動力研究與發展中心 超高速空氣動力研究所,綿陽 621000
0 引 言
運載火箭、遠程洲際彈道導彈等高超聲速飛行器采用助推級和巡航級串聯的布局方式。在爬升飛行階段由助推級提供動力,爬升飛行至一定高度時,助推級與巡航級分離(級間分離)。助推級與巡航級的高超聲速分離過程中存在復雜的流動現象,伴隨著相互干擾,涉及激波干擾、分離流和旋渦等現象,嚴重影響巡航級和助推級的氣動特性和飛行姿態,甚至影響分離成敗[1]。因此,分離影響的大小、是否會造成巡航級和助推級發生碰撞而導致分離失敗,需要開展相關風洞試驗進行預先研究。
國內外開展了基于模型自由飛的級間分離試驗技術研究工作(飛行器模型在風洞中自由飛行過程中實現級間分離以及與級間分離相關的CTS 軌跡模擬等試驗技術研究)[2-10]。美國CUBRC 的研究人員開展了級間分離風洞自由飛試驗,并對LENS Ⅱ風洞進行了改造以適應試驗需要。20 世紀80 年代,中國科學院力學研究所、中國航天空氣動力技術研究院和中國空氣動力研究與發展中心(CARDC)等即著手開展了級間分離問題的風洞模型自由飛試驗或與此相關的試驗技術研究工作[11-18]。
風洞自由飛試驗本身就具有一定難度,在其基礎上實現級間分離,試驗難度進一步提升。近年來,中國空氣動力研究與發展中心超高速空氣動力研究所采用半自由飛方式(即巡航級始終固定、助推級分離后自由飛行的方式)在常規高超聲速風洞中開展了模型級間動態分離試驗技術研究。
作為研究高超聲速飛行器分離過程的重要手段,風洞模型級間動態分離試驗可以模擬高超聲速飛行器分離時的內外流條件以及分離過程中巡航級、助推級的飛行姿態和相互位置關系,通過測力、測壓及高速攝像,獲得分離過程中巡航級和助推級的氣動特性及分離軌跡,為飛行器分離方案設計提供準確可靠的試驗數據,降低風險,同時也可以評估現有高超聲速飛行器分離方案的合理性和安全性。
研制風洞模型級間動態分離裝置是建立風洞模型級間動態分離試驗技術的關鍵環節之一。本文對風洞模型級間動態分離裝置進行了設計分析,并在常規高超聲速風洞中開展了驗證試驗。
1 總體設計
1.1 試驗技術原理
在高超聲速風洞模型級間動態分離試驗中,巡航級模型以一定迎角正裝于背支撐上并始終保持固定,背支撐與高超聲速風洞上支架連接。助推級模型安裝于動態分離支撐與釋放裝置上,后者安裝于風洞下支架支撐板上。安裝過程中,應保證兩級模型同軸且緊密貼合。圖1 為模型與支撐系統安裝示意圖,巡航級與助推級模型均為模型示意。圖2 為模型和動態分離支撐與釋放裝置安裝關系示意圖。
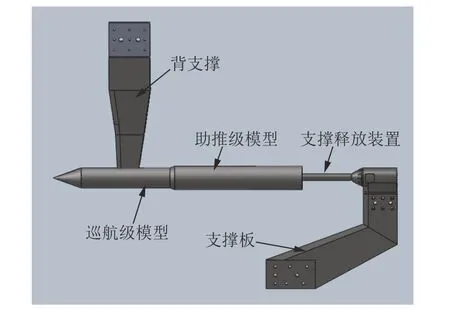
圖1 模型與支撐系統安裝示意圖Fig. 1 Schematic of model with support system
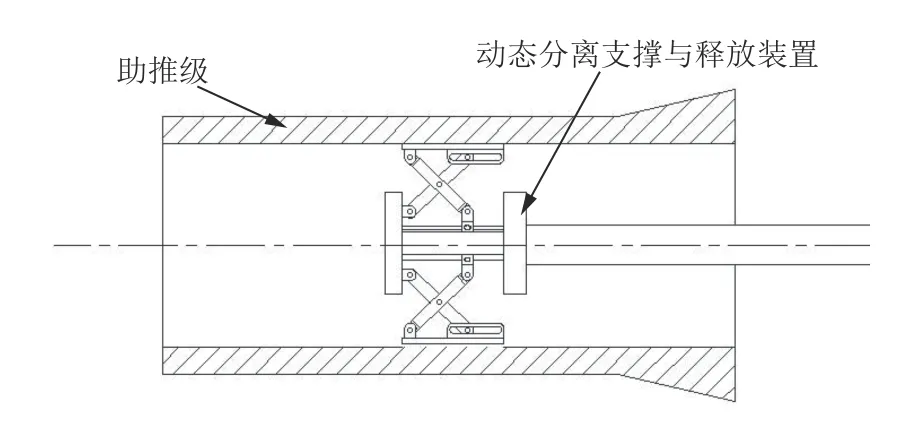
圖2 模型和動態分離支撐與釋放裝置安裝關系示意圖Fig. 2 Schematic of model with the dynamic stage separation support and release device
風洞啟動后,巡航級與助推級在流場中的初始位置保持不變;流場穩定后,控制系統發出分離指令,動態分離支撐與釋放裝置工作,將助推級與巡航級快速分離;助推級在流場中自由運動,最終落在動態分離支撐與釋放裝置上被回收。
1.2 總體設計要求
級間動態分離裝置設計主要包括動態分離系統支撐結構設計、動態分離支撐與釋放裝置設計。結合高超聲速風洞特點,應滿足以下要求:1)能承受風洞啟動沖擊。風洞啟動的強激波會對試驗段中的模型及機構產生強烈沖擊,此時動態分離裝置應保證模型兩級連接緊密,不能出現后一級模型松動甚至直接被吹飛的現象。2)巡航級模型背支撐應滿足一定固有頻率要求(不小于60 Hz)。3)不干涉助推級模型分離后在流場中的自由運動過程,避免不準確的分離軌跡影響分離方案合理性和安全性的評估。
2 動態分離裝置設計
2.1 動態分離系統支撐結構設計
支撐結構設計主要針對巡航級模型背支撐進行設計。級間動態分離試驗中的支撐結構除需滿足強度要求外,剛度要求比常規試驗更高,以避免低頻率高振幅的系統振動影響數據質量。本文設計了一種“Y”形結構的背支撐,能較好地解決剛度問題。該背支撐由3 部分組成:上部為與風洞上支架的連接接口,中部為方鋼結構,下部為“Y”形結構(包括天平安裝套筒),如圖3 所示。連接接口將整個背支撐與風洞連接;方鋼結構用于提高背支撐剛度,處于流場均勻區外,不影響堵塞度;“Y”形結構是背支撐與模型的連接部分,與傳統背支撐相比,支撐結構剛度有所提高,但在流場中會與模型表面流場相互干擾,為避免干擾過大,需保持前緣整流的尖劈外形輪廓。

圖3 背支撐結構示意圖Fig. 3 Three-dimensional structure of the back supporter
對背支撐結構固有頻率進行仿真計算。圖4~6分別為背支撐結構有限元模型及固有頻率計算結果。一、二階模態固有頻率均可視為航向響應固有頻率,一階模態固有頻率85.95 Hz 為航向最低響應固有頻率;三階模態固有頻率248.77 Hz 為縱向最低響應固有頻率。三階模態后的固有頻率可不予考慮。從圖6 可以看出:在航向和縱向最低響應固有頻率下,背支撐最大變形量分別為6.0688 和5.1639 mm。

圖4 背支撐結構有限元模型Fig. 4 Finite element model

圖5 背支撐結構固有頻率仿真結果(前六階模態)Fig. 5 The result of the inherent frequency
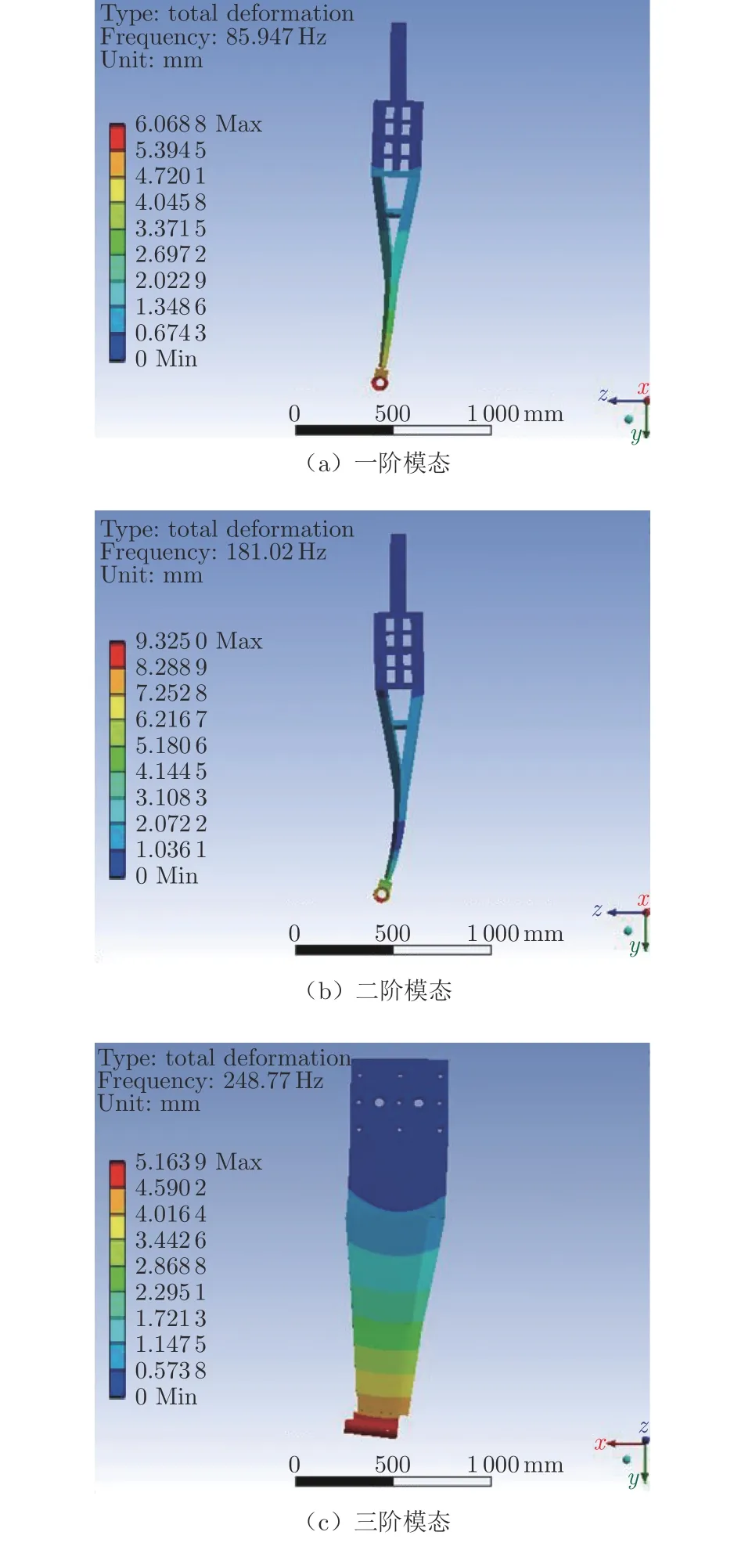
圖6 背支撐結構固有頻率仿真結果(前三階模態)Fig. 6 The result of the inherent frequency
2.2 動態分離支撐與釋放裝置研制
動態分離支撐與釋放裝置有高壓氣體驅動、彈簧驅動和火藥驅動等多種驅動方式,綜合考慮可靠性、安全性及設計參數的可調節性,試驗中采用高壓氣體驅動方式,運動結構采用標準氣缸驅動活塞桿帶動三臂支撐體機構上下運動方案。三臂支撐體機構是一個將氣缸活塞桿前后往復運動轉化為模型支撐墊相對正交運動的機構。圖7 為動態分離支撐與釋放裝置結構圖和工作狀態示意圖,工作原理為:
第一階段:模型支撐階段,即模型待分離階段。動態分離支撐與釋放裝置(后文簡稱“裝置”)以一定迎角固定于風洞下支架支撐板上,模型助推級安裝于裝置上。氣缸活塞桿向前(即圖7(a)的右方)運動,推動加長軸向前運動,帶動鉸鏈使3 對支臂呈剪刀式運動,使3 個模型支撐墊向上運動(即圖7(a)的上方),從3 個方向向上頂住助推級模型內壁,從而緊固模型。此時,氣缸活塞桿保持不動,氣缸持續提供推力。裝置緊固住助推級模型后,可以抵御氣流沖擊,使助推級模型在流場中初始位置保持不變。
第二階段:模型分離階段,即助推級模型被瞬間釋放、在流場中自由運動的階段。在此階段,氣缸兩個通氣孔在電磁閥作用下通氣發生反轉,一個快速進氣,一個通過排氣閥快速排氣,使氣缸活塞桿向后(圖7(a)左方)迅速運動,拉動加長軸向后運動,帶動鉸鏈使3 對支臂剪刀式運動,3 個模型支撐墊同時向下(圖7(a)下方)運動,瞬間與助推級模型分離。

圖7 動態分離支撐與釋放裝置Fig. 7 The dynamic stage separation support and release device
在第一階段(模型支撐階段),模型和機構應能抵御風洞啟動時的沖擊,此時支撐墊與模型內壁之間的摩擦力應大于模型在流場中受到的軸向力。為增加摩擦力,在支撐墊上布置花紋增加摩擦力系數。以ft表示氣缸在充氣壓力p1下產生的推力:
式中:K 為氣缸工作效率,一般為0.85;p1為氣缸充氣壓力;S1為活塞受p1作用的面積。p1= 0.8 MPa、活塞直徑120 mm 時,氣缸產生的推力為7690 N。
3 動態分離裝置試驗應用
3.1 風洞試驗設備與試驗條件
試驗在CARDC 某暫沖、吹吸式常規高超聲速風洞上進行。該風洞以名義馬赫數為4、5、6 和7 的型面噴管模擬17~46 km 的飛行高度(不同馬赫數的噴管模擬不同的飛行高度),配備了較完善的測控系統,可以滿足試驗中各種參數測量和處理、流場顯示與記錄的需要。試驗來流條件如表1 所示。

表1 來流條件Table 1 The test conditions
3.2 試驗裝置地面調試
為保證試驗安全,試驗前對裝置進行地面調試,主要檢測裝置對模型支撐是否牢固、釋放模型時運行時間是否滿足試驗需求。圖8 為地面調試時以裝置支撐假模型的照片。通過對假模型施加沖擊力,驗證裝置支撐模型是否可靠。圖9 為安裝于風洞中的裝置閉合與撐開時的照片。采用視覺測量系統測量動態分離支撐與釋放裝置從撐開到閉合的運動軌跡及運行時間。圖10 為測量點在裝置上的分布,高速相機拍攝速度為1000 幀/s。圖11 為測得的P1 點運動軌跡。從圖11 可以看出:裝置撐開到閉合的最大行程72 mm,與設計值一致(模型內壁直徑250 mm,裝置各支臂完全撐開為254 mm,略大于模型內壁直徑,閉合時110 mm);運行時間78 ms,而助推級模型自由落體下降72 mm 所需時間為121.2 ms,裝置運行時間小于模型自由落體時間,滿足試驗需求。裝置達到最大行程后,在沖擊力作用下略微反彈,反彈量在3 mm 以內且快速穩定,對試驗不產生影響。


圖8 調試照片Fig. 8 Test photograph of the device

圖9 風洞中的動態分離支撐與釋放裝置照片Fig. 9 The photograph of the device in wind tunnel

圖10 測點布置示意圖Fig. 10 Schematic of the assigned measurement dot
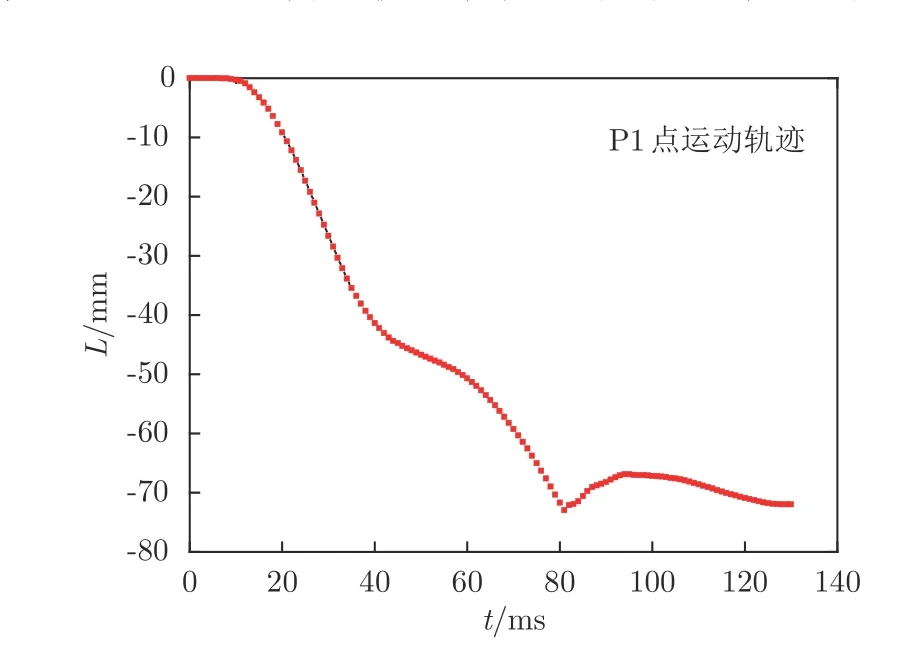
圖11 測量點運行軌跡Fig. 11 Schematic of the trajectory
3.3 風洞試驗結果
圖12 為風洞模型級間動態分離試驗模型分離面分離過程的紋影照片。可以看出,以裝置支撐助推級模型后,承受住了風洞的沖擊載荷,并順利完成了助推級與巡航級的分離,達到了預期效果。

圖12 模型分離面分離過程紋影照片Fig. 12 The picture of the schlieren
4 結 論
1)所設計的動態分離支撐結構固有頻率高,能夠滿足試驗需要。
2)研制的動態分離支撐與釋放裝置支撐性能好、分離速度快、穩定性好、可靠性高。
3)根據風洞尺寸、模型形狀及尺寸等具體情況,對動態分離支撐與釋放裝置進行適應性改造,可廣泛應用于常規高超聲速風洞模型級間動態分離試驗。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19