多段圓弧混凝土結構高精度測量關鍵技術*
2022-12-12 02:46:26張少帥吳東方李浩坤王道亮魏李照
施工技術(中英文) 2022年22期
張少帥,吳東方,李浩坤,王道亮,魏李照
(陜西建工第五建設集團有限公司,陜西 西安 710055)
0 引言
隨著建筑業的迅猛發展,大量體現時代氣息和具有文化內涵的異形建筑,如多段圓弧形結構不斷涌現,給測量施工帶來了巨大挑戰。準確地對弧形結構進行測量定位是弧形建筑施工的重難點。
國內外對異形混凝土結構相關分部工程施工技術如測量技術的專項研究依舊較少。李強等[1]在富陽北支江水上運動中心異形結構工程施工測量中詳細闡述了從布設到測量的過程,并提出相應的施工方案,保證了施工的連續性和均衡性。黃曙亮等[2]在北京銀河SOHO中心的測量工作中利用Revit軟件對圖紙上的曲線特征點構建數據模型庫,現場放樣時將數據庫中的坐標數據導入全站儀,直接進行放樣。鄒利群等[3]基于琴臺美術館任意雙曲面殼體屋蓋工程,借助測量機器人進行BIM放樣,驗證了測量機器人放樣技術的優勢。曹啟光等[4]在異形鋼結構測量施工中提出在鋼結構定位安裝中使用BIM+RTS測量機器人的測量方法,有效提高了放樣精度及工作效率。方睿等[5-6]基于Revit二次開發對異形結構放樣及變形監測進行深入研究,驗證了Revit二次開發放樣技術的優勢。
各案例證明BIM技術在施工測量中有獨有的優勢,進行BIM技術結合異形結構測量施工研究,能有效提升異形建筑測量效率及精度。然而,對于多段圓弧結構測量的研究文獻仍較少,鑒于此,本文結合陜西青年職業學院新校區項目,通過分析BIM技術+測量機器人工藝原理,分析其在多段圓弧結構測量的應用,以期為類似工程提供參考。
1 工程概況
陜西青年職業學院新校區位于西安市長安區常寧新區神禾三路以南,項目占地面積12.67萬m2,建筑面積11.62萬m2,包括試驗實訓樓、教學樓、綜合樓、圖書館、教師辦公用房、師生活動用房、會堂等多種建筑,主體為框架結構,地上5層,局部有地下室,項目效果如圖1所示。
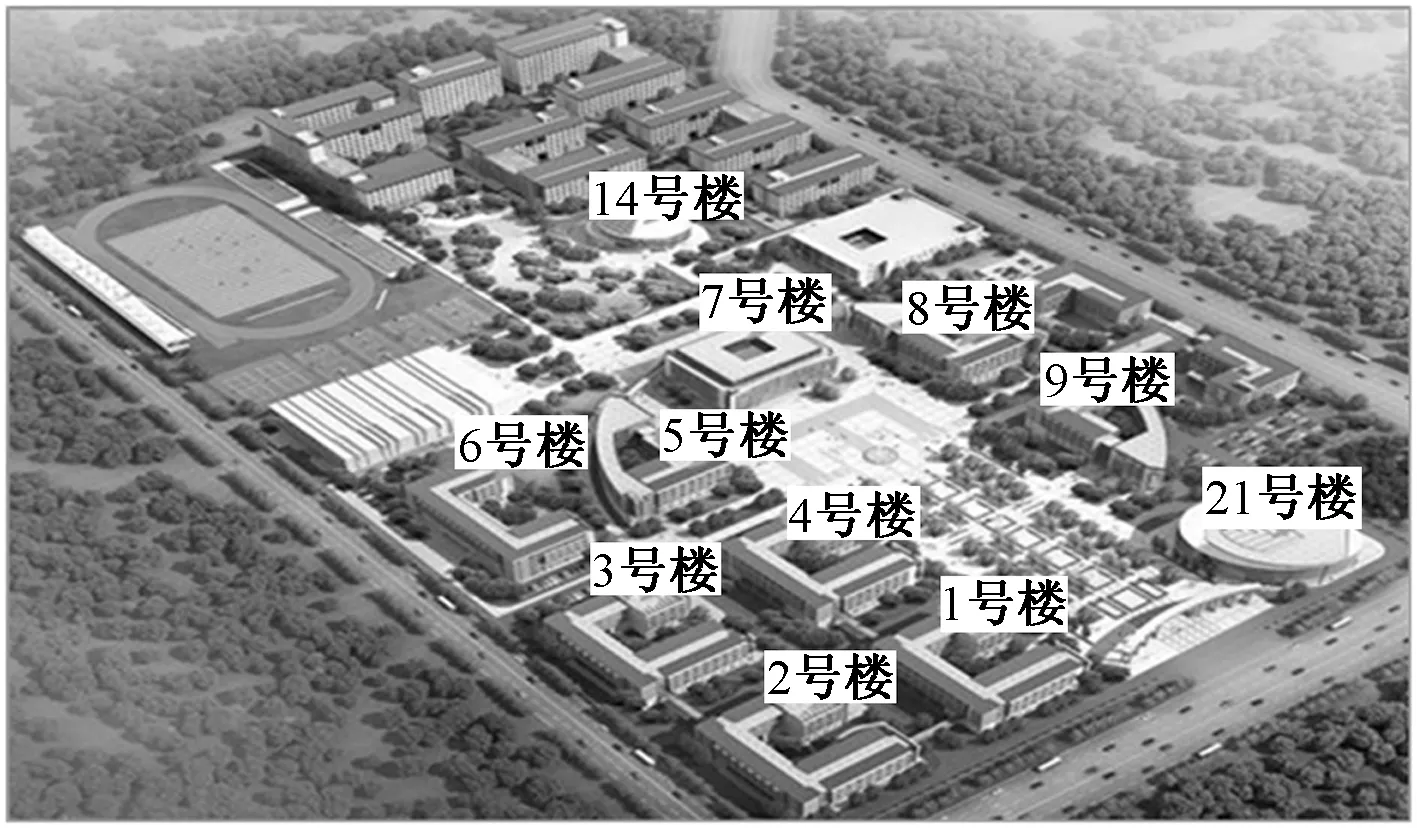
圖1 陜西青年職業學院新校區項目效果
2 工程特點及難點分析
2.1 工程特點
本項目由12棟單體組成,其中5棟樓均為不同圓心圓弧結構。平面定位精度要求高,測量定位過程中坐標數據多、實測工作量大。
2.2 工程難點
1)本工程外立面由多段圓弧組成,外立面弧度的不斷變換形成大量無規律空間點,無法有效通過傳統方法定位點引測出空間點平面投影與樓層軸網的位置關系。
2)圓弧形建筑結構因其外部造型復雜、內部空間結構變換大,往往需要大量的定位點,且大部分定位點并不能通過已有的施工圖紙資料獲取,需通過一定的輔助手段才能實現空間轉換部位控制點的平面定位。
3)圓弧形建筑控制點由平面引測至空間,往往缺少有效的引測參照,空間定位通常無法直接確定,且易出現定位誤差。
3 測量關鍵技術
3.1 工藝原理
傳統弧形結構測量放線工作主要依據解析幾何法先進行內業計算,再使用經緯儀與鋼卷尺進行聯合放線。與其他幾種方法相比較,基于BIM+測量機器人進行多段弧形結構放樣測量具有測量精度高、速度快、內業計算量小的特點,其工藝原理如圖2所示[7-8]。施工中,先確認放樣工作內容,再建立 BIM 3D模型,通過調整模型坐標系,提取放樣點坐標數據并導入測量機器人手簿,最后在現場架設測量機器人,進行建筑物放樣測量。

圖2 工藝原理
3.2 設置項目基點
施工時用水準儀將甲方提供的BM1,BM2標高傳遞到D1,D2,D3區域,1號實訓樓、2號教學樓及周邊地下車庫以D1標高作為±0.000以下施工標高基準點,6號綜合樓及周邊地下車庫以D2標高作為±0.000以下施工標高基準點,并標明絕對高程,便于在施工中使用,如圖3所示。

圖3 項目基點設置
3.3 BIM模型建立及數據處理
項目將BIM模型與智能型全站儀進行集成應用,具體配置如表1所示。

表1 測量儀器配置
3.3.1坐標定位
在Auto CAD場地平面圖中調出并解鎖項目基點及測量點,使用Revit軟件,以項目樣板方式鏈接原始定位圖,將項目定位圖的任一已知坐標點置于項目基點并鎖定。點擊項目基點及測量點輸入已知點坐標,Revit建模坐標定位如圖4所示。

圖4 Revit建模坐標定位
3.3.2BIM 3D模型建立
根據項目設定建模標準規則及圖紙,使用Revit2016軟件進行精細化模型建立。建立多段圓弧混凝土結構3D模型,如圖5所示。

圖5 BIM 3D模型
3.3.3創建并調整放樣點
按構件類型創建放樣點,根據不同構件類型放樣點建立不同族庫。多段圓弧結構具有多段復雜節點,其部分點位布設如圖6所示。因此通過Revit自定義移動功能,分次移動圓弧弦線中點并量取至圓弧垂直距離進行調整,使多段圓弧形成近似圓弧形狀,最終創建完成所有需要放樣的點位。

圖6 多段圓弧結構部分點位布設
3.3.4坐標數據轉換
由于Revit2016中的定位模型坐標系與現場施工坐標系原點和坐標軸指向不一致,因此,BIM模型創建完成后需將放樣點屬性的坐標系、坐標值轉換為施工坐標。使用文獻[5]的坐標轉換軟件,將模型坐標系換算為施工坐標系,轉換模型為:
(1)
式中:x,y為施工坐標;x0,y0為模型坐標;Δx,Δy為平移參數;m為縮放因子;θ為旋轉角。
完成BIM放樣點的創建后,對模型數據進行預處理,隱藏不需要的圖元信息,并將模型轉為IFC格式輸出。
3.4 測量機器人現場放樣測量
BIM坐標數據處理完成后,需在測量機器人放樣系統中進行設站、任務創建及放樣實施。測量機器人選用徠卡TS50,該儀器精度高、性能穩定,可自動搜索目標、精確照準目標、跟蹤目標、自動測量、自動記錄數據,并具有計算機遠程控制等優異性能。
機器人測量放樣系統主要由軟件和硬件組成。軟件用于從Revit軟件中選取放樣點坐標和數據處理,同時將經過格式轉換的Revit模型坐標數據讀取導入平板電腦中;硬件用于施工現場測量放樣。
3.4.1儀器設站原理
放樣測量時,從場地已知點出發,采用后方交匯法進行設站。使用平板電腦選取測量弧形結構部分各圓心位置及各段圓弧起止點位,設站原理如圖7所示。

圖7 設站原理
3.4.2儀器現場設站
BIM坐標數據處理完成后,首先,需在測量機器人放樣系統中進行任務創建。其次,在徠卡TS50主菜單程序中打開測量功能,進入開始測量界面,進行設站工作,并輸入設站點和定向點的點號、使用棱鏡高度、點坐標等相關數據。
主要步驟如下:①在Autodesk Revit軟件中安裝插件Trimble Field Points,使用插件在模型中選取并設置點位;②在圓弧結構每隔1m標記1個坐標點,拾取待放樣的坐標點進行自動編號并生成點坐標列表;③將所有坐標點和3D模型導入平板電腦,在平板電腦上安裝Trimble Field Link軟件;④在放樣系統中進行現場放樣,同時完成坐標點標記,指揮現場放樣點設置。
3.4.3現場測量放樣
利用測量機器人手簿進行現場測量放樣,在手簿中可實時瀏覽導入的BIM 3D模型。在手簿中選取設定好的多段圓弧放樣點,全程由平板電腦和放樣軟件控制,按手簿中的放樣點實時顯示圓弧點位編號、坐標及三維可視化模型數據,平板電腦中動態顯示當前棱鏡桿位置和目標位置信息,施工人員根據距離差別數值移動棱鏡桿直至兩者距離差別在允許范圍內,即可確定放樣點位并進行現場標記。

表2 實測數據和設計數據對比結果
測量機器人支持現場拍照,可自動保存放樣數據和生成放樣報告。在施工過程中,經過多次復測校核,確保點位精確,保證施工整體放樣效果。
4 實施效果
4.1 數據對比分析
為驗證BIM放樣軟件的精度,本文隨機選取背景工程結構中的10組坐標,將測量的坐標點數據與理論數據進行對比,如表2所示。放樣偏差基本在1mm以內,驗證了測量放樣精度滿足要求。
4.2 效果分析
1)實測效率高 以半數圓弧梁為例,總長度60m,共60個點位,內業數據處理1人用時1h,現場人工投入2人,共用時2h。傳統測量方法內業處理點位提取1人用時4h,現場放樣4人,用時16h。因此,使用BIM+測量機器人可極大地降低測量工作人力及時間的投入,效率顯著提高。
2)測量精度高 GB 50026—2020《工程測量標準》及 GB/T 12898—2009《國家三、四等水準測量規范》要求使用水準儀設備精度為±3mm,經緯儀設備精度為±2mm,鋼尺設備精度為±1mm,2m靠尺設備精度為±1mm,塞尺設備精度為±1mm,在測量過程中還存在人為因素導致測量誤差增大。自動測量機器人測量精度可達到±1mm,且不存在人為因素導致測量誤差增大,較傳統人工實測實量方式優勢明顯。
5 結語
將BIM+測量機器人技術綜合應用于陜西青年職業學院弧形混凝土結構測量施工中,通過建立BIM模型,并將其坐標系數據轉化為施工坐標,最后將施工坐標導入測量機器人工作簿,指導實際測量放樣施工。工程實踐證明,該技術對類似測點多、精度要求高的異形結構工程具有良好的應用價值,能提升工程管理信息化水平,大大提高多段圓弧異形結構測量放樣精度及施工效率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
