地鐵車輛受流器歸算質量模型動態參數優化*
2022-12-13 03:32:06王柄欽黃冬亮閻曉暉
城市軌道交通研究 2022年10期
阮 杰 王柄欽 郭 文 黃冬亮 閻曉暉
(1.武漢理工大學現代汽車零部件技術湖北省重點實驗室, 430070, 武漢; 2.中鐵第四勘察設計院集團有限公司電氣化設計研究院, 430063, 武漢; 3.武漢地鐵運營有限公司, 430035, 武漢∥第一作者, 副教授)
目前,地鐵車輛受流器與第三軌系統僅能承載120 km/h的設計速度[1]。然而,設計實現160 km/h甚至更高時速的地鐵車輛,已成為當前城市軌道交通行業的研究熱點。
對于如何提升地鐵車輛靴軌動力學性能,國內外學者進行了大量的研究。文獻[2]建立了受流器多體動力學模型,分析了不同運行速度、不同結構參數對受流器靴軌沖擊振動響應的影響規律。文獻[3]通過開展靴軌關系動態試驗,對受流器與第三軌進行優化及改造升級,進一步驗證了列車運行速度提升至160 km/h的可能性。文獻[4]探討了第三軌軌面不平順與徑向傾斜等因素帶來的靴軌間動態接觸力及其振動特性的變化規律。文獻[5]將受流器等效為帶有扭轉特性的懸臂梁機構,建立了靴軌耦合動力學模型,研究發現當列車運行速度超過120 km/h時,靴軌接觸質量急劇變差。上述文獻在改善靴軌系統動力學性能的基礎上進行了諸多研究和試驗,但對于高速工況下靴軌系統結構設計與優化的研究略顯不足。
本文基于ANSYS軟件建立地鐵車輛靴軌耦合系統參數化模型。將受流器歸算質量參數作為優化對象,針對平直段線路靴軌的接觸特性設計單目標優化方案,通過智能算法得到適合列車設計速度為160 km/h時受流器的最優設計參數,從而減少列車運行時的壓力波動,提高受流質量。
1 地鐵車輛靴軌耦合系統參數化模型的建立
1.1 受流器歸算質量模型及靴軌仿真模型的建立
武漢某地鐵線路使用下接觸式受流器,對其進行受流器動態標定試驗,識別目標受流器歸算質量模型階數以及動態參數的具體數值,具體測量方法參見文獻[6]。為更好地模擬靴軌間的接觸狀態,還原靴軌系統的功能度,保留滑塊幾何形貌并進行實體建模,其外形尺寸與實測值保持一致。圖1顯示了通過標定試驗得到的受流器歸算質量等效模型與有限元模型。模型中各參數的定義和取值為:m1=2.0 kg、m2=1.8 kg分別為質量塊的第1階、第2階當量質量(m1與m2之間、m2與基座之間均通過彈簧阻尼器進行連接);k1=31 326 N/m、k2=1 456 N/m,為彈簧阻尼器的剛度;c1=0.01 N/(m/s)、c2=20.18 N/(m/s),為彈簧阻尼器的阻尼。
由于第三軌的鋁合金軌體和不銹鋼帶緊密壓合,滑靴與之接觸滑動過程中兩者間不存在相對位移,故忽略其復合結構而將不銹鋼帶和鋁合金基體進行整體建模。不區分兩者材料屬性,使用同種彈性模量對模型進行統一求解。另外,第三軌模型采用的體積質量為單位長度第三軌質量與其截面積的比值。在ANSYS軟件中建立圖2所示的第三軌有限元模型。
受流器通過與第三軌接觸獲取電流。在ANSYS軟件中基于接觸對單元建立靴軌耦合關系,接觸算法采用罰函數法。
1.2 靴軌動態接觸力仿真及模型驗證
基于上述建立的靴軌耦合系統參數化模型,以40 km/h的列車運行速度作為研究工況,對彈性元件施加初始壓力135 N,以此來模擬受流器與第三軌實際接觸時的靜態接觸力。根據仿真結果,提取接觸力數值,并與相同跨距下靴軌動態接觸力的實測數據對比,如圖3所示。
將仿真結果與試驗結果中靴軌動態接觸力的最大值、最小值、平均值及標準差作為評價指標。各參數對比結果如表1所示。
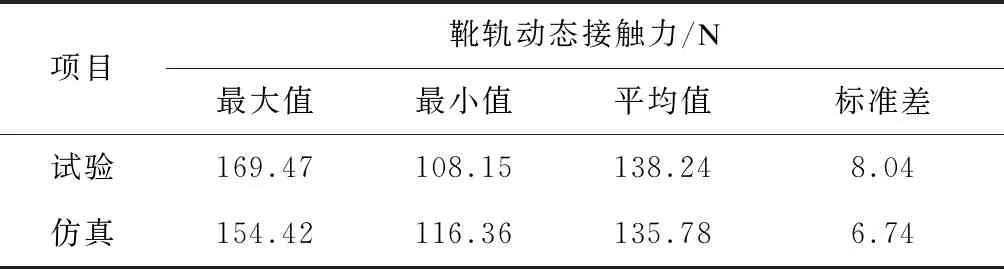
表1 靴軌動態接觸力仿真結果與試驗結果統計分析對比
根據圖3與表1可以發現,靴軌動態接觸力的仿真值與試驗值基本吻合。靴軌動態接觸力仿真最大值與最小值分別為154.42 N和116.36 N,與試驗數據相比,其最大值偏小,最小值偏大,這是由于仿真時忽略了軌道不平順、環境及施工誤差等因素的影響。另外,靴軌動態接觸力標準差的仿真值較試驗值雖存在16.17%的誤差,但因為該試驗值本身較小,僅有8.04 N,而仿真值為6.74 N,與試驗數據相差不大。因此,可以對該模型進行下一步的優化研究。
2 受流器歸算質量模型優化設計
2.1 受流器動態參數優化的數學模型
最優受流器的表征問題是非凸的且受到多種條件的制約,無法保證設計空間是連續的,在使用基于梯度定義的搜索算法時容易造成收斂困難甚至無法求解。而基于全局尋優的粒子群算法不需要了解優化問題的全部特征即可完成求解,適應性更強,收斂速度更快,更加適合本文受流器動態參數的優化工作。
2.1.1 適應度函數
改進的第三軌-受流器相互作用的受流器相關優化問題可被定義為:
(1)
式中:
ui——設計變量;
F0(ui)——適應度函數;
gm(ui)、hn(ui)——分別代表第m個等式約束和第n個不等式約束;
ui,lower、ui,upper——分別代表第i個設計變量取值的下限和上限;
M、N、I——分別代表等式約束、不等式約束和設計變量的數量。
此次優化的最終目標是使靴軌動態接觸力標準差最小。如果靴軌動態接觸力標準差低于其平均值的20%,則可以通過調節受流器拉伸彈簧機構來控制接觸力平均值,亦能確保受流器具有更好的安全邊際量。因此,適應度函數初步定義如下:
F0(ui)=σstd
(2)
式中:
σstd——靴軌動態接觸力的標準差。
2.1.2 約束條件的處理方法
目前,國內外對列車高速運行工況下受流器與第三軌間的接觸標準尚未明確,僅能參考TB/T 3271—2011《軌道交通 受流系統 受電弓與接觸網相互作用準則》中對列車設計速度在200 km/h以內的弓網接觸特性的相關規定。對受流器與第三軌接觸作以下約束:
1) 120 N≤Fmean≤150 N,Fmean為靴軌動態接觸力平均值。
2)σstd≤0.2Fmean。
3)H=(Fmax-Fmin)/2<90 N,H為接觸力幅值[7],Fmax、Fmin分別為受流過程中靴軌動態接觸力的最大值與最小值。
4) 離線時間t=0。
本文采用罰函數法處理上述約束條件,將其轉化為無約束的最小值問題。通過罰函數法對適應度函數進行調整。
(3)
式中:
Fs(ui)——引入罰函數后新的適應度函數;
γ——懲罰因子;
Φi——第i個約束條件下的懲罰值;
n——約束條件的總個數。
2.1.3 設計變量
優化過程中使用的設計變量是在受流器集中質量模型中唯一具有物理意義的變量,即所使用的受流器歸算質量模型的質量、剛度和阻尼,見圖1。因此,設計變量的向量為:
u=[m1m2k1k2c1c2]
(4)
設計變量的約束范圍直接影響優化結果的合理性。選擇適當的邊界不僅可以提高算法收斂的速度,還能間接剔除不合理的設計參數。通過對仿真結果進行分析,定義各設計參數的約束與取值范圍,如表2所示。
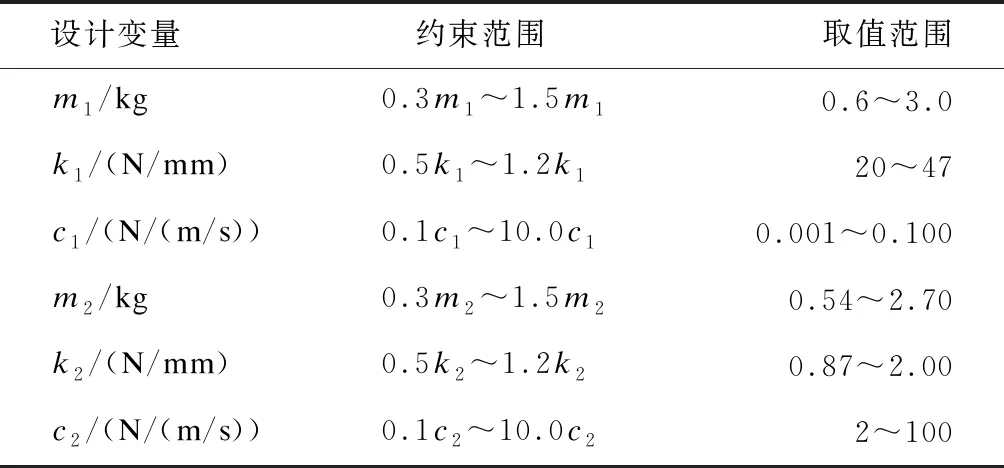
表2 設計變量的約束與取值范圍
2.2 基于MATLAB軟件和ANSYS軟件的協同優化分析
基于ANSYS軟件提供的批處理運行方式,依靠ANSYS軟件與MATLAB軟件強大的數據讀寫能力,在MATLAB軟件中編寫粒子群算法主程序;由ANSYS軟件接收MATLAB軟件提供的設計變量,通過ANSYS軟件自動化建模進行受流器和第三軌耦合系統動態仿真;將計算得到的靴軌動態接觸力通過文本文檔返回給MATLAB軟件對該程序進行優化,通過變量更新及不斷迭代,實現二者的聯合優化仿真。圖4顯示了MATLAB軟件與ANSYS軟件的協同優化流程。
3 受流器歸算質量參數優化結果分析
3.1 受流器歸算質量參數優化結果
整個優化過程共設置初始粒子15個、迭代20次,受流器加載運行速度160 km/h。將優化結果分為m1、k1、c1和m2、k2、c2兩個搜索空間。圖5和圖6分別顯示了粒子在三維空間中兩個平面上的投影。
m1的取值主要由滑靴質量決定,k1、c1主要受擺桿彈性變形的影響。通過粒子尋優,m1在解空間中迅速降低至設計要求的最小值附近,達到0.76 kg,遠低于試驗標定結果;c1、k1分別在0.005~0.050 N/(m/s)和30~36 N/mm范圍內聚集。綜上,在適當范圍內有效減小滑靴質量可降低列車行駛時的壓力波動;擺桿的等效剛度可適當降低,但不宜低于30 N/mm;c1對于靴軌動態接觸力標準差的影響較小,建議控制在0.05 N/(m/s)以下。
m2由除滑靴外其余部件的質量決定,k2、c2代表了拉伸彈簧的等效剛度與阻尼。在整個解空間中,k2呈明顯增加趨勢,基本達到規定范圍的上限,最優結果為1 905 N/m;c2在其初始值附近小幅變動;m2呈減小趨勢,且該值最終穩定在0.9~1.4 kg范圍內。仿真結果表明,增加拉伸彈簧的剛度并降低集電靴的質量可以降低靴軌動態接觸力標準差,但集電靴質量不宜過小,否則會降低靴軌間接觸力;同時,建議將拉伸彈簧的等效剛度設置在1 900 N/m 左右。表3為優化前后受流器各參數取值對比。
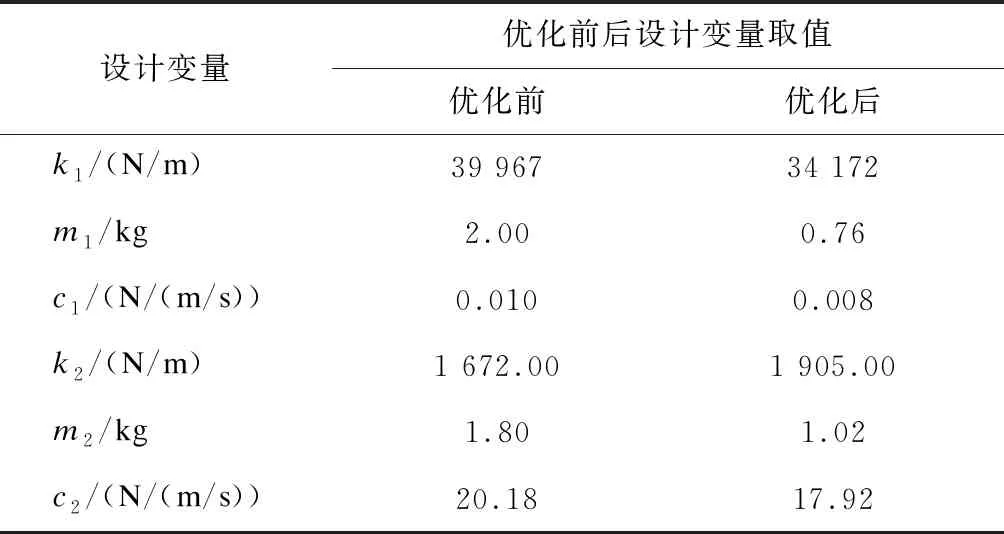
表3 優化前后受流器各參數取值對比
3.2 優化后列車不同速度下的靴軌接觸特性
采用優化前后受流器的兩組動態參數,在列車運行速度分別為40 km/h、80 km/h、120 km/h及160 km/h的條件下,對靴軌接觸特性進行動力學仿真對比分析。圖7為優化前后靴軌動態接觸力變化曲線。由圖7可見,優化前后靴軌動態接觸力最大值均出現在支撐位置附近,而優化后靴軌動態接觸力幅值有了明顯降低。表4為優化前后列車不同運行速度下靴軌動態接觸力的對比情況。
根據表4可知,優化后受流器的各參數不僅可以滿足列車不同速度下的運行要求,同時對于降低靴軌動態接觸力標準差有明顯優勢,且隨著列車運行速度的增加,改善效果越為明顯。當列車運行速度為160 km/h時,優化前靴軌動態接觸力最大值達到247.64 N,最小值僅為48.92 N,標準差為31.62 N。由此表明,在該運行速度下靴軌動態接觸力變化幅度較大,波動劇烈。優化后靴軌動態接觸力標準差降至17.74 N,降幅達43.89%;而靴軌動態接觸力平均值與優化前基本一致,且該值在列車不同運行速度下均可維持在130~140 N。由此表明,優化后靴軌動態接觸力波動更加平穩,即受流器的功能特性有所改善。
3.3 受流器通過端部彎頭的仿真計算
端部彎頭作為第三軌斷口處的過渡件,引導受流器進入端部彎頭時若不能保持良好接觸,勢必增加受流器與端部彎頭的沖擊頻率,產生拉弧現象,影響行車安全。根據CJ/T 414—2012《城市軌道交通鋼鋁復合導電軌技術要求》中對端部彎頭的相關規定,建立了1∶30坡度低速端部彎頭與1∶50坡度高速端部彎頭仿真模型。按照規定,低速端部彎頭適用于列車運行速度在35 km/h以下的工況,高速端部彎頭適用于列車運行速度在120 km/h以下的工況。
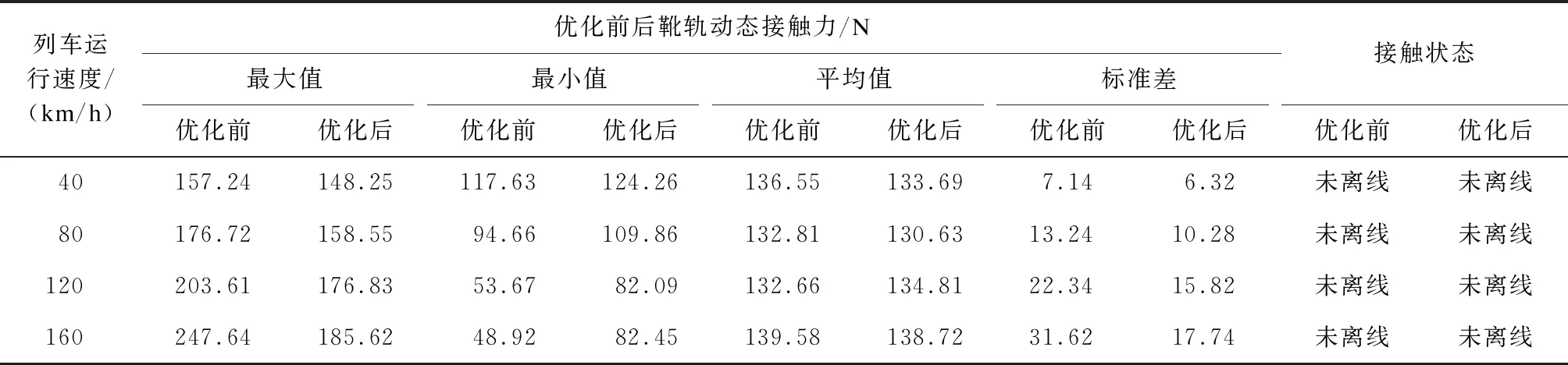
表4 優化前后列車不同運行速度下靴軌動態接觸力
本文以35 km/h和120 km/h兩個列車運行速度閾值分別進行優化前后受流器行經低速端部彎頭和高速端部彎頭時的靴軌動力學仿真計算,如圖8所示。選取列車運行過程中靴軌動態接觸力的最大值、最小值,離線時間及碰撞次數作為指標進行優化分析,如表5所示。
由表5可見,當受流器行經低速端部彎頭時,優化前后靴軌動態接觸力在平直線路段的波動范圍基本一致;但在傾斜線路段,優化后靴軌動態接觸力波動范圍明顯低于優化前,整體變動更加平緩。當受流器行經高速端部彎頭時,優化前受流器在初始碰撞后以及經過變軌點時出現離線脫軌現象,并和端部彎頭產生兩次碰撞,整個離線過程歷時13.6 ms;而優化后受流器可始終與第三軌保持接觸,靴軌動態接觸力幅值亦有明顯降低。仿真結果表明,經優化后的受流器不僅可以正常通過低速、高速端部彎頭,也顯著改善了非平順工況下的靴軌接觸特性。
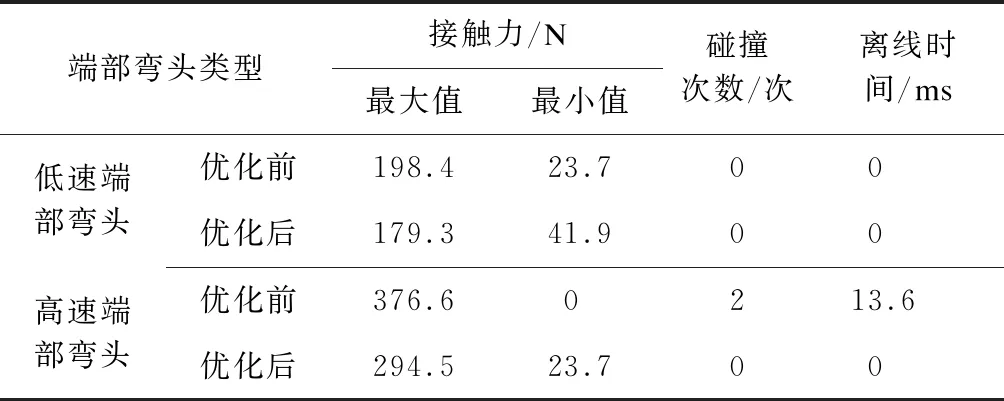
表5 優化前后受流器行經低速、高速端部彎頭時的計算結果
4 結語
1) 建立了地鐵車輛靴軌耦合參數化模型,并根據試驗結果驗證了該模型的可靠性。
2) 基于MATLAB軟件和ANSYS軟件進行協同優化分析,證明了將智能算法引入靴軌系統參數優化的可行性。
3) 對設計速度為160 km/h工況下受流器的設計參數進行優化,得到了適合該工況下的一組最優設計參數,并根據仿真結果提出優化建議。
4) 對受流器歸算質量參數進行了多種工況的仿真驗證,證明了優化結果的可靠性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年2期)2019-08-23 08:12:08