基于光子多普勒技術(shù)的高超風洞驅(qū)動器速度歷程測量*
2022-12-14 04:55:28郝歌揚楊鈺城趙榮娟呂小鵬楊雅涵吳國俊
物理學報 2022年23期
郝歌揚 楊鈺城 趙榮娟 呂小鵬 楊雅涵 吳國俊?
1) (中國科學院西安光學精密機械研究所,陜西省海洋光學重點實驗室,西安 710119)
2) (中國空氣動力研究與發(fā)展中心,超高速空氣動力研究所,綿陽 621000)
3) (青島海洋科學與技術(shù)試點國家實驗室,海洋觀測與探測聯(lián)合實驗室(西安光機所部分),青島 266200)
4) (中國科學院大學,北京 100049)
受限于計算流體力學方法的模型及計算量,地面風洞模擬試驗仍是現(xiàn)階段開展高超聲速過程研究的主要技術(shù)手段.本文針對高焓膨脹管/激波風洞的自由流參數(shù)精細調(diào)控、安全穩(wěn)定運行及有效試驗時間提升等需求,利用光子多普勒測速技術(shù)實現(xiàn)了對不同驅(qū)動段壓力情況下,自由活塞運動全程速度變化情況的連續(xù)跟蹤測量.驅(qū)動壓力為1.3 MPa 時,活塞速度的數(shù)值仿真最高速度88.981 m/s,實測最高運動速度88.810 m/s,相對偏差為–0.19%;活塞驅(qū)動壓力為2.7 MPa 時,活塞數(shù)值仿真最高速度125.100 m/s,實測最高運動速度123.843 m/s,相對偏差為–1.00%,為該風洞的性能優(yōu)化及穩(wěn)定運行提供了重要數(shù)據(jù)支撐.
1 引言
可控速度為Ma=6—30 的高超聲速技術(shù)是未來航空航天及軍事領域發(fā)展的制高點,對國家綜合國力、軍事戰(zhàn)略和國民經(jīng)濟等諸多領域具有深遠影響.中國、俄羅斯及美國是當今世界高超聲速技術(shù)最先進的三個國家.近年來,我國高超技術(shù)發(fā)展迅猛,成功研發(fā)鷹擊–21 等多型高超聲速導彈.俄羅斯在2022 年爆發(fā)的俄烏沖突中多次使用高超聲速導彈,標志著高超聲速武器正式走入實戰(zhàn).美國長期以來高度重視高超技術(shù)發(fā)展,其政府問責局公開文件顯示,2015—2024 年間美國在高超領域投入近150 億美元,且從投資比例來看,逐漸由單點技術(shù)突破轉(zhuǎn)向整體裝備研發(fā)[1].相信隨著2022 年5 月14 日AGM-183 A 型高超聲速巡航導彈的試射成功,其將在高超領域獲得更多發(fā)展.因此在當前復雜國際局勢以及全球高超聲速技術(shù)快速發(fā)展的背景下,我國應進一步加強該領域投入,以保持絕對領先地位.
受限于湍流模型、轉(zhuǎn)捩模型及計算代價等因素,計算流體力學(computational fluid dynamics,CFD)方法還無法解決高超聲速飛行器的壁面摩擦阻力、氣動熱環(huán)境及流動分離等瓶頸問題[2],因此地面風洞模擬試驗仍是現(xiàn)階段深入分析及研究高超聲速過程的主要技術(shù)手段.高焓膨脹管/激波風洞使用自由活塞驅(qū)動,可實現(xiàn)對超高速高焓流場的模擬,相比反射式激波風洞能夠提供離解度更低的自由來流,飛行環(huán)境更接近真實情況[3],是進行軌道再入高焓流動研究的重要試驗平臺.目前全球主要高焓膨脹管/激波風洞包括澳大利亞昆士蘭大學的X3 風洞[4,5]、美國卡爾斯潘大學布法羅研究中心的LENS XX 風洞[6,7]、中國航天空氣動力技術(shù)研究院的FD-21 風洞[8]及中國空氣動力研究與發(fā)展中心(China aerodynamics research and development center,CARDC)的高焓膨脹管風洞[9,10]等.
自由活塞是高焓膨脹管/激波風洞的核心部件,掌握活塞的真實運動速狀態(tài),能夠為保障風洞安全穩(wěn)定運行、提升風洞試驗性能及提高流場調(diào)控精度提供重要的基礎數(shù)據(jù).另外,2014 年中國航天空氣動力技術(shù)研究院朱浩等[11]指出,通過優(yōu)化活塞運動過程,尋找合適的活塞破膜速度,拓展風洞定壓驅(qū)動時間,也是延長風洞有效試驗時間的主要途徑.因此,對自由活塞運行速度的測量具有重要研究意義和實用價值.
1998 年,日本國家航空航天實驗室Itoh 等[12]在角田研究中心的HEK 風洞的驅(qū)動活塞表面,通過陽極氧化法形成了一系列間隔恒定、反射率起伏的區(qū)域.當活塞通過風洞外壁設置的激光照射器時會間歇收到反射信號,通過對反射信號時間間隔的測量實現(xiàn)了對活塞運動速度的測量.2020 年,中國航天空氣動力技術(shù)研究院孫日明等[13]利用類似方法,在風洞外壁等間隔設置一系列光纖傳感器以及壓力傳感器,通過測量活塞運行時相鄰兩個傳感器壓力響應所對應的時刻,獲得兩個傳感器間活塞運動的平均速度;在風洞末端利用激光測距方法對活塞位移變化情況進行測量,進而通過微分獲得活塞運動速度.
上述速度測量方法均屬于區(qū)間測速范疇,需獲取活塞通過連續(xù)兩個測速點時的相對距離和相對時間,進而計算活塞的運動速度,因此對距離和時間的測量誤差會累積并引入測速誤差,導致測量精度降低;另外由于傳感器尺寸或測距儀測量頻率限制,測點間距不可能過小,從而導致測量的時間分辨率降低.光子多普勒測速技術(shù)基于物體運動所引起反射激光的多普勒效應,無需進行微分計算,其測量值更接近瞬時速度,因此測量精度更高;同時由于使用連續(xù)激光測量,其時間分辨率僅由速度反演算法的時間窗長度決定,通常可達到微秒量級甚至更窄,因此其可實現(xiàn)更高時間分辨率的速度測量,與上述測量方法相比具有明顯優(yōu)勢.
本文針對高焓膨脹管/激波風洞自由活塞的速度測試需求,通過光子多普勒測速技術(shù)實現(xiàn)了對自由活塞運動全程速度歷程的高精度、高分辨率跟蹤測量,連續(xù)測量距離超過20 m,最高測試速度超過120 m/s,最高時間分辨率可達納秒量級,為自由活塞的速度測量提供了全新思路和方法,為風洞性能優(yōu)化及穩(wěn)定運行提供了重要數(shù)據(jù)支撐.
2 試驗方案及裝置
2.1 測速系統(tǒng)設計
本文所研制光子多普勒測速系統(tǒng)(photon Doppler velocimeter,PDV)基于激光多普勒效應,利用全光纖馬赫-曾德爾干涉儀結(jié)構(gòu),系統(tǒng)組成如圖1所示.系統(tǒng)工作時,激光器(laser)輸出中心波長1550.012 nm 的窄線寬激光,線寬小于100 kHz,輸出功率為10 mW,光纖隔離器(isolator,ISO)抑制激光反向傳輸注入激光器;光纖耦合器1 (1550 nm 1×2 fiber optic coupler1,coupler1)的分光比為1∶99,將輸出激光分為兩束,其中99%的光信號注入光纖放大器(erbium doped fiber amplifier,EDFA),稱為測量光,最高功率可達1.8 W;剩余1%的光信號為本地參考光,在光路中設置一個可調(diào)衰減器,用于匹配兩光路的光信號強度,提高干涉信號強度,兩束光的振幅分別表示為
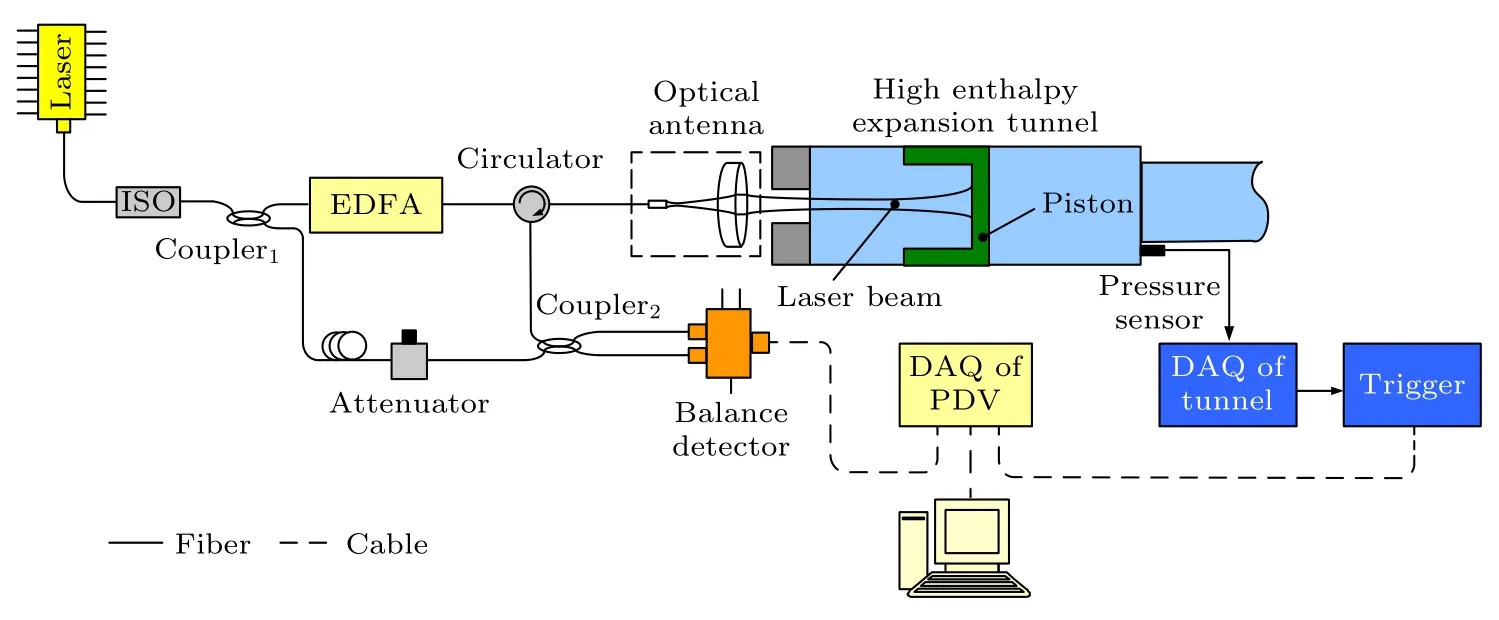
圖1 光子多普勒測速系統(tǒng)組成Fig.1.Structure of photon Doppler velocimeter.

其中,E1和E2表示復振幅,ω0表示激光角頻率,φ1和φ2表示相位.
光學天線將經(jīng)EDFA 放大的測量光進行空間輸出,輸出光束在活塞內(nèi)表面發(fā)生反射后,重新被光學天線接收.隨后測量光經(jīng)過單模光纖環(huán)形器(circulator),與本地參考光在光纖耦合器2(coupler2)發(fā)生干涉,隨后被分為兩路,分別被平衡探測器(banlance detector)所接收,平衡探測器的輸出光電流信號可表示為[14]

其中,ωD表示由活塞表面返回,攜帶多普勒頻移的激光角頻率,φD表示返回激光的相位,α表示平衡探測器的光電轉(zhuǎn)換效率.
本系統(tǒng)選用的平衡探測器為索雷博PDB435 C-AC,帶寬為100 Hz—350 MHz.由于帶寬限制,(2)式中只有頻率為ωD–ω0的部分能被探測器響應,其余高頻部分及直流偏置將被有效濾除,即平衡探測器輸出光電流可簡化為

其中,B表示多普勒頻移所引起的光電流強度,激光角頻率ω與頻率f間的關(guān)系為ω=2πf,fD–f0表示多普勒頻移的大小,Δφ表示φ1和φ2相位差.
平衡探測器輸出信號被數(shù)據(jù)采集卡所接收后,上傳至上位機進行速度反演,為提高對微弱信號的分辨能力,使用采樣率2×109s–1,量化深度14 bits,輸入電壓范圍±200 mV 的高速高精度數(shù)據(jù)采集卡(SP Devices ADQ14 DC-1 X).根據(jù)激光的多普勒效應,活塞運動速度與激光干涉頻率間的關(guān)系為

其中,λ0表示激光波長.
2.2 試驗現(xiàn)場布置
CARDC 的高焓膨脹管風洞由活塞驅(qū)動段、第二驅(qū)動段、被驅(qū)動段、加速度、噴管和試驗段組成,其中活塞驅(qū)動段長度為22.5 m.自由活塞在驅(qū)動段高壓氣體驅(qū)動下壓縮管內(nèi)常溫輕質(zhì)氣體,經(jīng)過多次破膜及壓縮后速度和焓值顯著提高,產(chǎn)生超高速高焓自由流.為便于對活塞運動速度進行測量,風洞端蓋上設置有光學觀察窗口,口徑?=40 mm,測速系統(tǒng)的光學天線安裝在風洞端蓋的光學觀察窗口內(nèi),測速儀主機放置在風洞一側(cè),兩者通過光纖進行連接,現(xiàn)場安裝方式如圖2 所示.

圖2 PDV 系統(tǒng)在高焓膨脹管風洞的安裝示意圖Fig.2.Installation diagram of PDV in high enthalpy expansion tunnel.
由于系統(tǒng)有效數(shù)據(jù)采集時間與自由活塞的壓縮過程均在102ms 量級,因此為了準確反映活塞運動全程速度變化歷程,保證記錄數(shù)據(jù)完整性,精確的觸發(fā)時間至關(guān)重要.在前期系統(tǒng)設計中,原計劃利用風洞發(fā)射信號作為觸發(fā)源,當系統(tǒng)收到風洞發(fā)射信號后開始計時,一定延遲時間后系統(tǒng)進行數(shù)據(jù)記錄;但通過調(diào)試發(fā)現(xiàn),由于驅(qū)動段充氣狀態(tài)不同,風洞發(fā)射信號發(fā)出至自由活塞開始運動之間的時間晃動可達數(shù)秒量級,完全無法為系統(tǒng)提供足夠精度的觸發(fā)時間.因此將觸發(fā)方式改為通過風洞驅(qū)動段末端的壓力傳感器進行觸發(fā),系統(tǒng)配合進行負延時數(shù)據(jù)采集,即當活塞在驅(qū)動段末端發(fā)生碰撞后,風洞數(shù)據(jù)采集系統(tǒng)接收壓力傳感器輸出,將其整型為標準觸發(fā)信號后再輸入測速系統(tǒng).測速系統(tǒng)在觸發(fā)前數(shù)據(jù)循環(huán)覆蓋采集,觸發(fā)后可記錄前一時間段內(nèi)的探測數(shù)據(jù),該過程的延遲時間僅為納秒量級,因此可有效保證系統(tǒng)數(shù)據(jù)采集時間覆蓋自由活塞的壓縮運動全過程.
3 試驗測試及結(jié)果
3.1 指標檢測結(jié)果
為驗證系統(tǒng)測量效果,由中國計量科學研究院對系統(tǒng)測速精度進行了檢測(證書編號: Lscs2019-2115),檢測原理如圖3 所示.

圖3 PDV 系統(tǒng)的測速精度檢測裝置Fig.3.Test device of measuring accuracy for PDV.
該裝置可通過轉(zhuǎn)動角速度生成標準線速度,其生成的標準線速度可表示為[14]

其中,n表示電機轉(zhuǎn)速,通過轉(zhuǎn)速標準裝置進行測量,其測量范圍10—100000 r/min,不確定度為1×10–5(k=3);r表示轉(zhuǎn)盤中心至轉(zhuǎn)盤邊緣反射鏡的垂直距離,由激光測距儀進行測量,且轉(zhuǎn)速及距離均采用多次測量取平均值以減小檢測誤差.由于該方法生成較高速度時存在較大安全隱患,因此主要針對40 m/s 以下速度范圍進行了檢測,檢測結(jié)果見表1.可以看出,在40 m/s 以下速度段,所研制PDV 具有較高速度測量精度,測量誤差可控制在0.17 m/s 以內(nèi);同時系統(tǒng)最遠測量距離達到26.3 m,具備對活塞運動全程的速度測量能力.
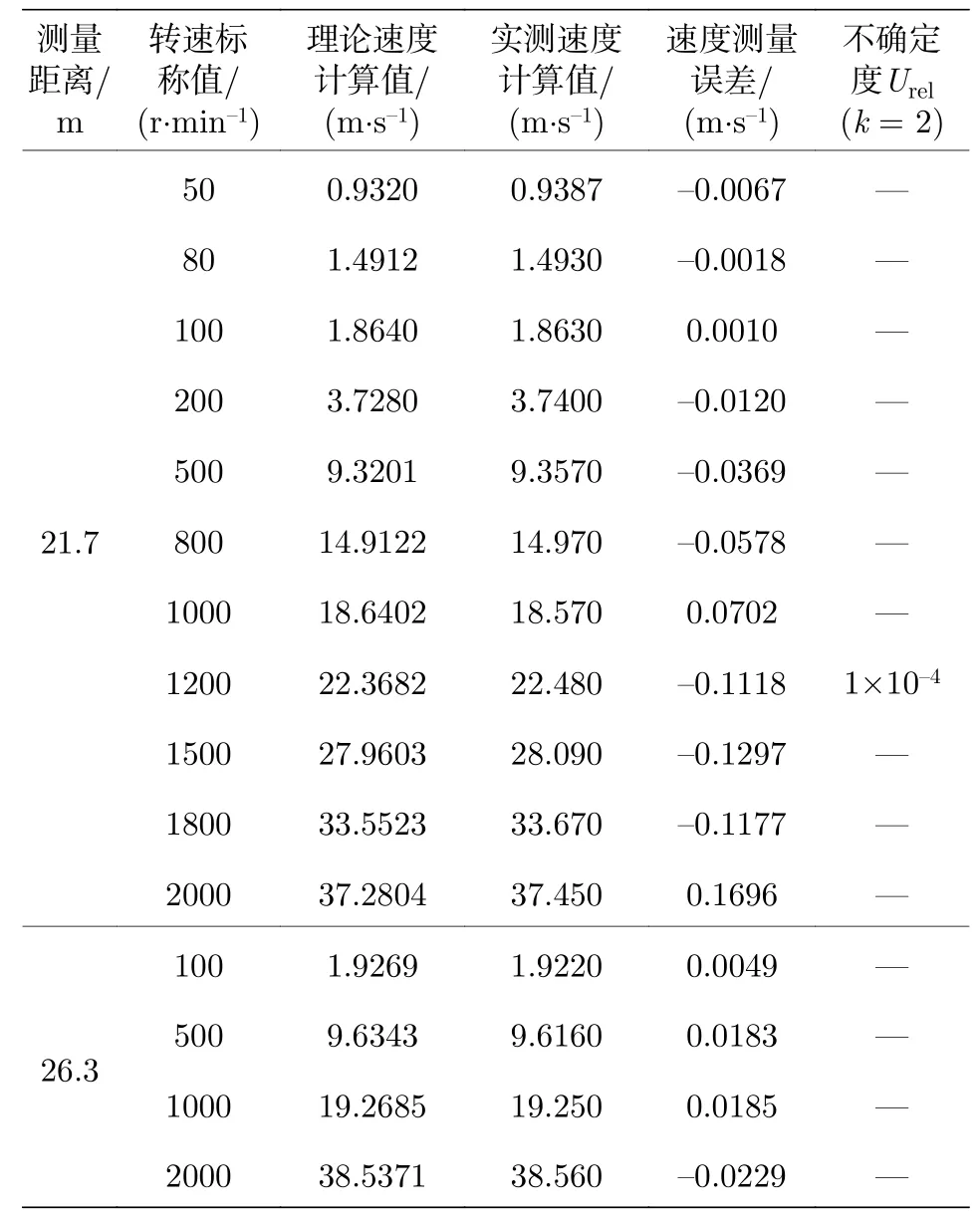
表1 40 m/s 以下速度段速度測量誤差檢測結(jié)果Table 1.Test results of the measuring accuracy of PDV under 40 m/s.
3.2 風洞試驗結(jié)果
為驗證系統(tǒng)在風洞測試中的速度測量精度,首先對自由活塞的運動速度進行理論計算,計算模型如下.在壓縮段內(nèi),活塞的運動動力學方程為
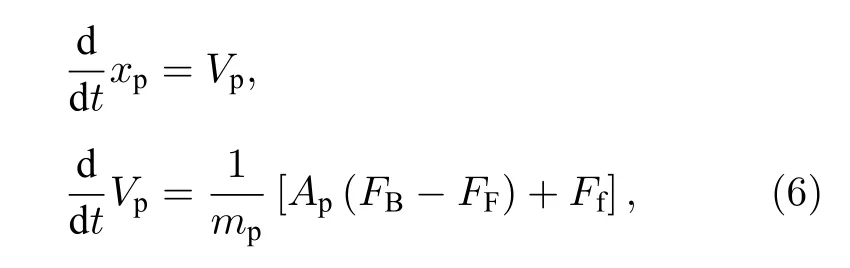
其中,xp,Vp,mp,Ap,FB,FF,Ff分別表示活塞質(zhì)心位置、質(zhì)心速度、質(zhì)量、端面面積、作用在活塞后端面的壓力、作用在活塞前端面的壓力、摩擦力.摩擦力的計算公式為

其中,Vtol=10–6m/s.最大摩擦力為

其中,uf和Aseal分別代表密封材料摩擦系數(shù)和密封圈有效面積.
風洞試驗共進行2 次,自由活塞驅(qū)動壓力分別為1.3,2.7 MPa,活塞前端放置長度1269 mm 的限位筒,活塞自身長度為1026 mm,即活塞的運動起始位置位于驅(qū)動段前端約2 m 處.試驗中設置激光功率為1.8 W、數(shù)據(jù)采集卡采樣率2×109s–1.現(xiàn)場試驗中,由于活塞運動所引起的多普勒頻率較高,時域波形已無法明顯辨析信號頻率,因此采用自研速度反演算法對活塞運動速度進行解算[15,16].該算法基于短時傅里葉變換算法構(gòu)建,通過時間窗函數(shù)對原始數(shù)據(jù)進行頻譜分析,得到該時間窗內(nèi)的頻譜峰值,則該時間窗內(nèi)的瞬時速度可表示為

其中,λ0表示激光波長,fmax表示時間窗內(nèi)的頻譜峰值.與傳統(tǒng)短時傅里葉變換算法不同的是,本算法針對活塞運動起始時刻未知、加速度變化大的特點,設置了自動運動起點定位功能及自適應時間窗變換功能,提高對信號的時間分辨率和測量精度,理論計算及實測速度結(jié)果如圖4 所示.
由圖4 可知,在自由活塞驅(qū)動壓力為1.3 MPa狀態(tài)下,其數(shù)值仿真最高速度為88.981 m/s,實測最高運動速度為88.810 m/s,相對偏差為–0.19%;在活塞驅(qū)動壓力為2.7 MPa 狀態(tài)下,其數(shù)值仿真最高速度125.10 m/s,實測最高運動速度123.843 m/s,相對偏差–1.00%;另外在活塞運動過程中,實測速度與理論仿真速度具有極高的吻合性,因此證明了自研PDV 及速度反演算法具有極高的測量精度和較長的連續(xù)測量距離,基本實現(xiàn)了對高焓膨脹管風洞內(nèi)自由活塞運動全程速度變化情況的連續(xù)跟蹤測量.值得說明的是,雖然對活塞速度的理論計算已能夠較好地反映活塞的真實運動狀態(tài),但對活塞速度的實際測量仍具有十分重要的實用價值.第一,當活塞驅(qū)動段的驅(qū)動氣體組分、壓力及膜片材料、厚度等參數(shù)改變時,對活塞速度的實際測量結(jié)果可作為驗證理論模型正確性及修正理論模型的重要依據(jù);第二,活塞尾部的減震橡膠會與風洞壁面產(chǎn)生劇烈摩擦損耗并隨著使用時間增加而老化.通過對活塞速度的實際測量可實現(xiàn)對活塞狀態(tài)的監(jiān)控,可對由于減震橡膠磨損及老化造成的運動狀態(tài)改變提前預警,從而保障風洞安全運行.

圖4 不同驅(qū)動壓力下自由活塞的運動速度測量結(jié)果 (a) 驅(qū)動壓力為1.3 MPa;(b) 驅(qū)動壓力為2.7 MPaFig.4.Measurement results of the motion velocity of the free piston under different driving pressures: (a) Driving pressure is 1.3 MPa;(b) driving pressure is 2.7 MPa.
為進一步分析自由活塞在驅(qū)動段內(nèi)的運動狀態(tài),對圖4 實際測量得到的時間-速度曲線進行積分,獲取了活塞速度與位移的對應關(guān)系,如圖5所示.可以看出,速度極大值點出現(xiàn)在16.5 m 左右位置,由于活塞的運動起始位置位于驅(qū)動段前端約2 m 處,因此可認為活塞在開始運行后約220 ms,距離驅(qū)動段前端約18.5 m 位置速度達到最大值,隨后開始急劇減速,與驅(qū)動段末端發(fā)生碰撞后停止.

圖5 不同驅(qū)動壓力下自由活塞的運動位移-速度變化曲線Fig.5.Distance-velocity curve of piston with the different driving pressure.
通過對驅(qū)動速度測量及對位移的分析可以看出,自由活塞在高焓膨脹管風洞的運行末段,在前端驅(qū)動壓力和后端生成壓縮波的共同作用下,活塞在未發(fā)生撞擊時即達到了最大速度,隨后快速減速.因此,一定程度上證明了20 世紀60 年代Stalker[17]提出的活塞軟著陸思想是切實可行的,即活塞可以在破膜后以一定速度進行定壓驅(qū)動,在不發(fā)生碰撞的情況下柔軟地停在壓縮管末端.但在實際風洞試驗中,還需要通過優(yōu)化膜片設計結(jié)構(gòu)、調(diào)整驅(qū)動氣流組分及壓力等措施,提高對活塞驅(qū)動氣體的調(diào)控精度,以達到最佳活塞破膜速度,全面提升風洞的試驗性能.
4 分析與討論
由表1 可以看出,所研制光子多普勒測速系統(tǒng)的最遠測量距離可達到26.3 m,而高焓膨脹管風洞內(nèi)自由活塞的運動全過程僅為20.5 m,理論上系統(tǒng)不僅能獲取自由活塞的最高速度,且應能夠?qū)崿F(xiàn)對撞擊速度的測量.但由圖4 可以看出,當活塞開始減速后,系統(tǒng)獲取的有效測速點逐漸減少,未能實現(xiàn)對活塞撞擊速度的有效測量.且在圖4(b)中約0.07—0.08 s 出現(xiàn)部分測速點的偏差,造成了運動曲線的不連續(xù).為對上述兩個問題進一步分析,首先對1.3,2.7 MPa 及無驅(qū)動氣體情況下不同距離處接收信號相對強度進行了對比,如圖6 所示.

圖6 不同驅(qū)動壓力下相對回波強度變化Fig.6.Relative signal intensity with the different driving pressure.
系統(tǒng)光學天線的發(fā)射光束設計為高斯結(jié)構(gòu),束腰位置位于21 m 處.根據(jù)空間-光纖耦合理論,束腰位置處的回波強度最大,其他位置的接收強度關(guān)于束腰位置呈對稱分布,圖6 中無驅(qū)動氣體情況下的實測信號回波強度曲線(黑色實線)與理論分析基本符合.但當系統(tǒng)在風洞使用時,由于驅(qū)動氣體的存在,發(fā)射光束束腰位置發(fā)生明顯前移,且隨著驅(qū)動壓力的增加,移動量逐漸增大;其中驅(qū)動壓力為1.3 MPa 時束腰位置約在10 m 處(藍色點線),驅(qū)動壓力為2.7 MPa 時束腰位置約在9 m 處(紅色劃線).據(jù)此認為系統(tǒng)未測得活塞撞擊速度的原因可能為以下兩點:
1)強烈的驅(qū)動氣流導致光學天線發(fā)射光束的光斑產(chǎn)生擴散,使原光束的束腰位置前移,因此有效測量距離無法覆蓋活塞運動最末端;
2)強烈的驅(qū)動氣流對發(fā)射光束存在強散射,導致活塞運動末端的接收信號強度急劇降低,已無法滿足速度反演算法所需的最低信噪比要求,因此無法實現(xiàn)對撞擊速度的有效測量.
隨后對圖4(b)中0.07 s 與0.10 s 對應測點的信號頻譜與圖4(a)中相應測量速度值所對應測點的信號頻譜進行了對比,如圖7 所示.由圖7(a)可以看出,當驅(qū)動壓力為1.3 MPa 時,回波信號頻譜有明顯峰值(對應速度13.90 m/s);但驅(qū)動壓力增大至2.7 MPa 時,回波信號極弱,已無明顯頻譜峰值;由圖7(b)可以看出,不同驅(qū)動壓力下均有明顯的頻譜峰值(對應速度34.41 m/s),但驅(qū)動壓力為2.7 MPa 時的頻譜峰值強度與1.3 MPa 時的頻譜峰值強度相比降低了約30 dB.同時對比圖7(a),(b)可以看出,驅(qū)動壓力為1.3 MPa,速度為34.41 m/s時的頻譜峰值強度與速度為13.90 m/s 時的頻譜峰值相比提高了約10 dB.據(jù)此認為造成圖4(b)約0.07—0.08 s 運動曲線的不連續(xù)的原因可能為:驅(qū)動活塞通過其后端沿風洞管壁徑向布置的多個噴氣口噴射氣流共同驅(qū)動,在活塞剛開始運動時,強烈的氣流混合在測量光路上形成了十分紊亂的流場,嚴重降低回波信號強度.當驅(qū)動氣流壓力為2.7 MPa 時,回波信號已完全無法被系統(tǒng)所接收,因此在活塞剛開始運動的一定時間內(nèi)速度測量值出現(xiàn)了較大偏差.隨著活塞繼續(xù)向前運動,流場趨于穩(wěn)定,回波信號強度逐漸增加,測量恢復正常.

圖7 不同驅(qū)動壓力下相同速度點的干涉信號頻譜分布圖(a) 速度為13.90 m/s;(b) 速度為34.41 m/sFig.7.Frequency spectrum at the same velocity and the different driving pressure: (a) Velocity is 13.90 m/s;(b) velocity is 34.41 m/s.
5 結(jié)論
針對高焓膨脹管/激波風洞自由流參數(shù)精細調(diào)控、安全穩(wěn)定運行及有效試驗時間提升等需求,研制了一套光子多普勒測速系統(tǒng).該系統(tǒng)基于激光多普勒效應,利用全光纖馬赫-曾德爾干涉儀結(jié)構(gòu),光學天線與測速儀主機采用分體式設計;其中光學天線安裝在風洞端蓋的光學觀察窗口內(nèi),測速儀主機放置在風洞一側(cè),兩者通過光纖連接.
通過對該系統(tǒng)40 m/s 以下速度段的測速精度及探測距離進行檢測,其測量誤差可以控制在0.17 m/s 以內(nèi),連續(xù)測量距離可達到26.3 m.在風洞現(xiàn)場試驗中,系統(tǒng)實現(xiàn)了對不同驅(qū)動壓力下活塞運動全程速度的連續(xù)跟蹤測量,其中驅(qū)動壓力為1.3 MPa時,活塞速度的數(shù)值仿真最高速度88.981 m/s,實測最高運動速度88.810 m/s,相對偏差是–0.19%;活塞驅(qū)動壓力為2.7 MPa 時,活塞數(shù)值仿真最高速度125.100 m/s,實測最高運動速度123.843 m/s,相對偏差為–1.00%.試驗結(jié)果證明,光子多普勒測速技術(shù)能夠?qū)崿F(xiàn)對高焓膨脹管風洞內(nèi)自由活塞運動速度的連續(xù)跟蹤測量,為該風洞的性能優(yōu)化及穩(wěn)定運行提供重要數(shù)據(jù)支撐.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45