復(fù)雜建筑空間人員應(yīng)急疏散的無人機引導(dǎo)模型研究*
2022-12-14 03:35:06汪京輝房志明
中國安全生產(chǎn)科學(xué)技術(shù) 2022年11期
關(guān)鍵詞:建筑
呂 偉,師 遠,汪京輝,房志明
(1.武漢理工大學(xué) 安全科學(xué)與應(yīng)急管理學(xué)院,湖北 武漢 430070;2.武漢理工大學(xué) 中國應(yīng)急管理研究中心,湖北 武漢 430070;3.上海理工大學(xué) 管理學(xué)院,上海 200093)
0 引言
隨著我國城市化建設(shè)水平的不斷提高,城市中大型化、復(fù)合化建筑綜合體數(shù)量逐漸增加,此類建筑內(nèi)部人員具有密集度高、熟悉度低等特征,一旦遭遇火災(zāi)爆炸等突發(fā)事件,人群慌亂失序容易導(dǎo)致應(yīng)急疏散不及時、不合理和不高效,甚至造成人員傷亡。因此,緊急情況下復(fù)雜建筑空間中的應(yīng)急疏散引導(dǎo)十分重要,如何科學(xué)、高效進行應(yīng)急疏散引導(dǎo),是亟需解決的問題。
針對應(yīng)急疏散引導(dǎo)有效性和科學(xué)性,國內(nèi)外學(xué)者主要探討2類問題:一類是疏散引導(dǎo)效率可行性問題,通過對比火災(zāi)情況[1]、大型購物中心[2]、地下商業(yè)綜合體[3]、地鐵車站[4]、陌生環(huán)境[5]等多種場景中有無疏散引導(dǎo)時的疏散效率,得出有疏散引導(dǎo)的方案可實現(xiàn)更短的疏散時間和更均衡的出口利用,有效提升整體疏散效率;另一類是疏散引導(dǎo)人員設(shè)置問題,通過對引導(dǎo)人員數(shù)量、速度、位置等因素進行研究,發(fā)現(xiàn)引導(dǎo)員在一定程度上可以提高疏散效率,但并非越多越好,當(dāng)引導(dǎo)員速度為行人速度的75%時,可能獲得較高的疏散效率[6],并且通過引導(dǎo)員靜態(tài)布局優(yōu)化,能夠確定布設(shè)引導(dǎo)員的最佳位置和最大數(shù)量[7],綜合考慮出口通行能力和最短路徑設(shè)置引導(dǎo)員,也可獲得較高的疏散效率[8]。
在應(yīng)急疏散引導(dǎo)途徑和方式方面,除布設(shè)疏散引導(dǎo)員,先進的技術(shù)和系統(tǒng)也被嘗試引入以輔助引導(dǎo)應(yīng)急疏散。目前,主要技術(shù)有定向揚聲器聲音誘導(dǎo)[9]、機器人動態(tài)引導(dǎo)[10]、WiFi室內(nèi)移動應(yīng)用引導(dǎo)[11]、聲學(xué)引導(dǎo)[12-13]、LED燈珠光學(xué)引導(dǎo)[14]、BIM+VR三維動態(tài)引導(dǎo)[15]和激光引導(dǎo)[16]等,為復(fù)雜建筑場景中人員疏散提供更加安全可靠的引導(dǎo)途徑,但大部分技術(shù)尚處于實驗室研究及優(yōu)化階段,需要進一步向?qū)嶋H工程應(yīng)用邁進。
綜上,在復(fù)雜建筑空間的人群應(yīng)急疏散中采用引導(dǎo)策略和方法,是提升疏散效率、保障人員生命安全的重要途徑,而先進技術(shù)和系統(tǒng)裝備又是實現(xiàn)這種疏散引導(dǎo)的重要方式。考慮到無人機是1種可攜帶聲、光及生命探測模塊的自主運動智能體,可以在不確定的對象和環(huán)境條件下執(zhí)行高危險任務(wù),故利用無人機取代引導(dǎo)員,在復(fù)雜建筑空間中用于疏散引導(dǎo)被困人員疏散逃生,具有高性價比、高可行性。但由于疏散引導(dǎo)無人機集成復(fù)雜度高、待解決的問題繁多,目前尚無可實際應(yīng)用的疏散引導(dǎo)無人機,此外,利用無人機進行疏散引導(dǎo)的研究也相對較少。
因此,本文將從理論方法層面,通過依次解決無人機全覆蓋遍歷建筑空間的飛行路徑規(guī)劃、無人機引導(dǎo)疏散人員尋找出口的最優(yōu)路徑規(guī)劃、多無人機協(xié)同搜索的任務(wù)分配3個子問題,圍繞無人機引導(dǎo)疏散的可行性和效率提升,提出1套可適用于復(fù)雜建筑空間人員應(yīng)急疏散的無人機引導(dǎo)模型,以期為無人機實際應(yīng)用于復(fù)雜建筑空間中人員應(yīng)急疏散提供理論支撐。
1 復(fù)雜建筑空間中無人機空間遍歷
無人機在復(fù)雜建筑環(huán)境中的空間遍歷是實現(xiàn)被困人員搜尋的關(guān)鍵途徑和疏散引導(dǎo)的重要前提,這種空間遍歷要求無人機既能夠?qū)ㄖ臻g實施全覆蓋,又能夠使其在遍歷路徑中重復(fù)折返次數(shù)盡可能少。為達到上述要求,采用無人機移動規(guī)則尋優(yōu)方法,首先確定無人機在建筑環(huán)境中的移動規(guī)則,如圖1(a)所示,對于當(dāng)前狀態(tài)下的無人機,其移動方向的可能性用8鄰域元胞表示,分別用字母a~h表示,如果某元胞被障礙物占據(jù)或已經(jīng)被無人機遍歷,則該元胞對應(yīng)移動方向刪除,對于未被刪除的移動方向,無人機遵循一定優(yōu)先級規(guī)則進行移動。對于8鄰域移動可能,無人機優(yōu)先級規(guī)則數(shù)量為8領(lǐng)域的全排列,即8!種(40 320種),例如a>b>c>d>e>f>g>h表示其中1種移動優(yōu)先級規(guī)則。為確定較優(yōu)的移動優(yōu)先級規(guī)則,隨機生成如圖1(b)~圖1(d)所示3張測試地圖,借助計算機程序?qū)γ繌埖貓D進行8!種移動優(yōu)先級下的無人機遍歷測試,記錄每種優(yōu)先級下無人機重復(fù)折返次數(shù),即每一空間元胞被重復(fù)遍歷次數(shù)之和,列出每張測試地圖對應(yīng)無人機重復(fù)折返次數(shù)最少的前2種結(jié)果,如表1所示。
選擇表1中3張地圖總折返次數(shù)較少的作為本文無人機空間遍歷移動規(guī)則:a>b>c>h>f>g>d>e,即“左上>上>右上>左>下>左下>右>右下”,如圖2(a)所示,運用此移動規(guī)則實現(xiàn)1個隨機建筑環(huán)境中無人機空間遍歷路徑規(guī)劃,如圖2(b)所示。由圖2可知,該路徑重復(fù)遍歷元胞次數(shù)為3次。

圖1 無人機空間遍歷移動規(guī)則尋優(yōu)測試地圖Fig.1 Test map for optimization of UAV space traversal movement rules
無人機在進行空間遍歷移動時,當(dāng)周邊鄰域全部被障礙物占據(jù)或已經(jīng)被遍歷時,根據(jù)移動規(guī)則,將無法繼續(xù)行進,即無人機進入空間遍歷“盲區(qū)”,如圖3(a)所示。為解決這一問題,制定并采用“盲區(qū)策略”:一旦進入空間遍歷“盲區(qū)”,無人機將返回距離最近的上一個多選擇點,在該點該變方向繼續(xù)空間遍歷,在返回上一個多選擇點時,可穿越已經(jīng)遍歷過的區(qū)域。考慮到無人機從“盲區(qū)”到其最近的上一個多選擇點之間的路徑有多種可能,采用廣度優(yōu)先算法找到最短路徑,返回后繼續(xù)重新遍歷。該策略過程如圖3所示,圖中×和O分別表示實體障礙物和已經(jīng)遍歷的區(qū)域。

表1 無人機空間遍歷移動規(guī)則尋優(yōu)測試結(jié)果Table 1 Test results for optimization of UAV space traversal movement rules
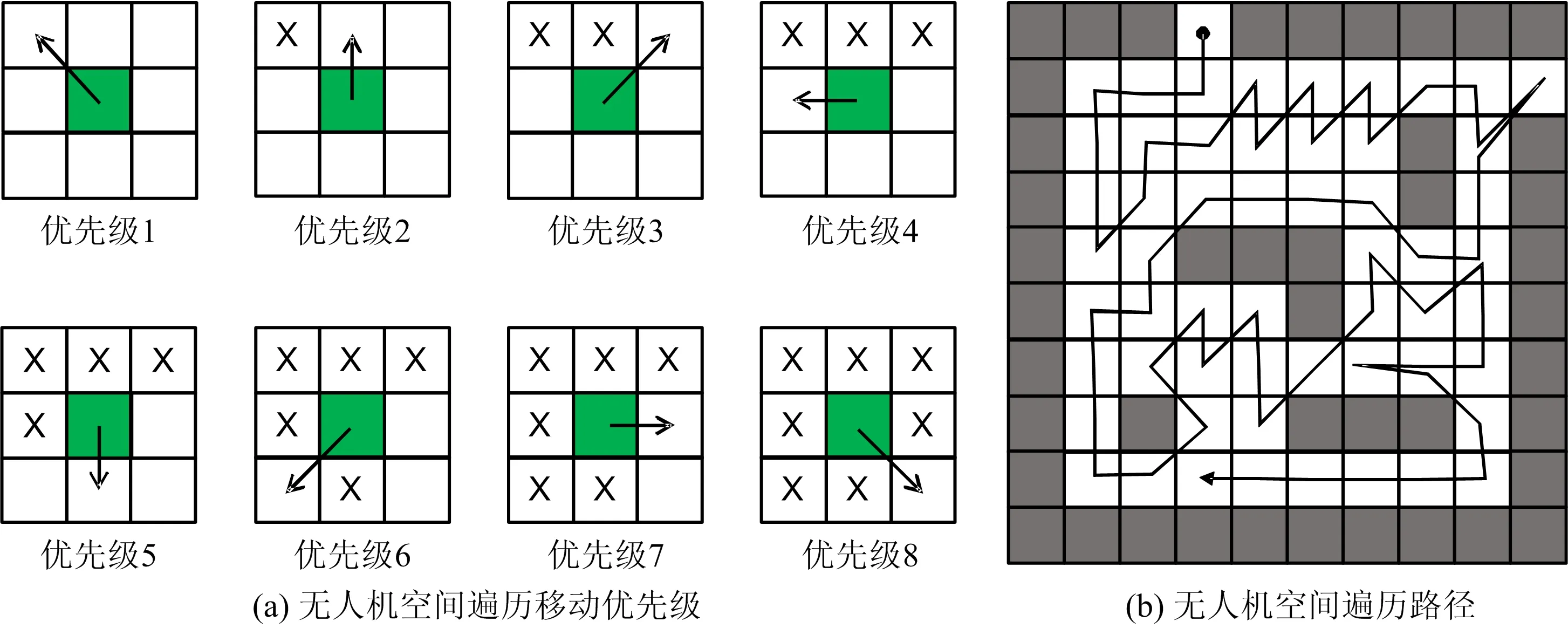
圖2 無人機空間遍歷移動規(guī)則及空間遍歷路徑規(guī)劃Fig.2 UAV space traversal movement rules and space traversal path planning
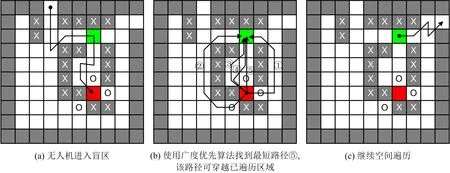
圖3 無人機空間遍歷“盲區(qū)”策略示意Fig.3 Schematic diagram for “blind area” strategy of UAV space traversal
2 復(fù)雜建筑空間中無人機引導(dǎo)疏散路徑規(guī)劃
當(dāng)無人機在遍歷過程中發(fā)現(xiàn)被困人員時,需要立即引導(dǎo)被困人員盡快撤離并抵達安全出口。對于路徑尋優(yōu)問題,不僅要考慮路徑的快捷性,更要考慮路徑的安全性,特別是當(dāng)建筑中存在煙、火、毒等災(zāi)害因素時,最快捷的路徑可能會因不安全而被舍棄。在路徑規(guī)劃問題中,快捷和安全相當(dāng)于2個優(yōu)化目標(biāo),快捷性可由路徑長度表征,安全性則可由威脅疏散的災(zāi)害因素表征,為便于問題求解,將二者進行統(tǒng)一。為此,本文提出“當(dāng)量長度”概念,表征被困人員到達安全出口的難易程度,核心思想則是將影響疏散路徑的災(zāi)害因素轉(zhuǎn)化為其作用路徑長度的權(quán)重,將安全維度轉(zhuǎn)化為長度維度。
令疏散路徑上第i個路徑節(jié)點元胞在受到第j種災(zāi)害影響因素時的路徑長度權(quán)重系數(shù)為Kij,如式(1)所示:
Kij=Ti_R/Tij_R
(1)
式中:Ti_R表示正常情況下疏散者穿過第i個路徑節(jié)點元胞所需時間,s;Tij_R表示第i個路徑節(jié)點元胞在第j種災(zāi)害因素影響下,疏散者穿過該節(jié)點元胞所需時間,s。由于受災(zāi)害因素影響時,人員需更快離開受災(zāi)害因素影響的元胞,故Ti_R>Tij_R,Kij>1。
令疏散路徑OD的“當(dāng)量長度”為LOD,計算如式(2)所示:
(2)
式中:δi為受災(zāi)影響判定量,若第i個路徑節(jié)點元胞受到災(zāi)害因素影響,則δi=1;li表示第i個路徑節(jié)點元胞的實際長度,為1個標(biāo)準(zhǔn)長度單位1;n為路徑OD上的元胞總數(shù)量;i=1,2,…,n,為路徑起點元胞致終點元胞的順序編號;j=1,2,…,m,表示對應(yīng)的m種災(zāi)害影響因素編號。
災(zāi)害因素影響下的疏散路徑“當(dāng)量長度”示例如圖4所示。圖4中顯示由同一起點至同一終點間的3條路徑r1,r2,r3,其中,路徑r1,r3分別途徑8,4個元胞,且這2條路徑并未受其他因素影響,則路徑r1,r3的路徑長度和“當(dāng)量長度”相同,分別為8,4;而對于路徑r2,雖然其路徑長度為4,但由于途徑的第2個元胞是火災(zāi)煙區(qū),受煙氣溫度和煙氣毒性2種因素影響,這2種因素的路徑長度系數(shù)分別為K21=1.8,K22=3,根據(jù)“當(dāng)量長度”定義,路徑r2的“當(dāng)量長度”為6。因此,最佳疏散路徑為r3。
圖4 災(zāi)害因素影響下的疏散路徑“當(dāng)量長度”示例Fig.4 Example of evacuation path “equivalent length” under influence of disaster factors
針對引導(dǎo)被困人員找尋出口的最優(yōu)路徑規(guī)劃問題,本文選擇引入基于遺傳-蟻群算法設(shè)計最優(yōu)路線。運用遺傳算法的快速全局搜索能力,對蟻群算法初期所需信息素進行快速處理,利用蟻群算法的正反饋機制,快速找出可行路徑,縮短搜索時間。具體包括以下6個步驟:
1)將建筑空間平面離散化為元胞節(jié)點,并將元胞編碼為k(k=1,2,…,M,M為空間劃分元胞總量),設(shè)元胞k自身路徑“當(dāng)量長度”為Lk。
2)設(shè)火災(zāi)初始位置為w,每個地點初始信息素數(shù)值為0。根據(jù)遺傳算法求解最優(yōu)種群,根據(jù)適應(yīng)度函數(shù)生成初始種群,對得到的種群進行選擇、復(fù)制、交叉、變異操作,生成下一代種群,重復(fù)此操作,得到最優(yōu)種群,作為蟻群算法的初始種群信息素。
3)設(shè)Ant(x,k)為螞蟻x在元胞k上,螞蟻的信息素濃度為τ,螞蟻在移動中根據(jù)各地點的啟發(fā)式信息和“當(dāng)量長度”信息決定移動方向,計算螞蟻x從元胞k移動到元胞k′的概率Px(k,k′),如式(3)所示:
(3)
式中:Psum(k)為所有經(jīng)過元胞k的螞蟻所留下的信息素總值;η(k,k′)為啟發(fā)函數(shù),可結(jié)合式(2)得出η(k,k′)=1/Lkk′;α為信息啟發(fā)算子;β為期望啟發(fā)因子。
4)采用Ant-Cycle模型更新信息素,如式(4)~(5)所示:
(4)
τi′=τi′+Δτii′
(5)
式中:Q為螞蟻行走單位長度所釋放的信息素強度,為設(shè)定好的固定常量;螞蟻行走過程中,在行走距離上均勻釋放信息素,當(dāng)螞蟻從元胞i行走到i′時,元胞i′的信息素濃度增加1個Δτ,Δτ與元胞i和i′間的“當(dāng)量長度”Lii′成反比。
5)每次搜索后,路徑上的信息素會進行整體更新,下一波螞蟻經(jīng)過時,會按照信息素濃度較高的規(guī)則選擇路徑較短的路口而放棄長路徑,循環(huán)往復(fù),“當(dāng)量長度”越短的路徑信息素濃度越高,螞蟻在正反饋機制作用下找到最優(yōu)路徑。
6)當(dāng)搜尋次數(shù)為N時,結(jié)束搜尋路徑,輸出此時保存的最優(yōu)路徑信息,算法結(jié)束。
為驗證遺傳-蟻群算法在火災(zāi)時期路徑規(guī)劃的可行性,建立 20×20的元胞空間表示建筑環(huán)境,其中灰色表示障礙物,橙色表示受火災(zāi)影響,以顏色深淺劃分4個等級,即火災(zāi)的不同嚴重程度,其對應(yīng)路徑長度權(quán)重系數(shù)分別設(shè)定為2,3,4,5,數(shù)值越大表示火災(zāi)越嚴重,越不適宜穿越。設(shè)定蟻群算法參數(shù)為蟻群數(shù)量N=50,信息啟發(fā)算子α=1,期望啟發(fā)因子β=5;遺傳算法參數(shù)為初始種群G=50,最大迭代次數(shù)Gmax=80,交叉概率pc=0.7,變異概率pm=0.08。運用Phpstorm編譯程序?qū)⑺谶z傳-蟻群算法的無人機引導(dǎo)疏散與被困人員自行逃離路徑進行仿真計算并比較,如圖5所示,黑色線路為算法給出的無人機引導(dǎo)疏散路徑,藍色曲線表示人員自行疏散路徑。由圖5可知,本文構(gòu)建算法可實現(xiàn)最大限度的災(zāi)害規(guī)避,同時疏散路徑“當(dāng)量長度”也遠小于自行逃離情況,路徑規(guī)劃效果良好。
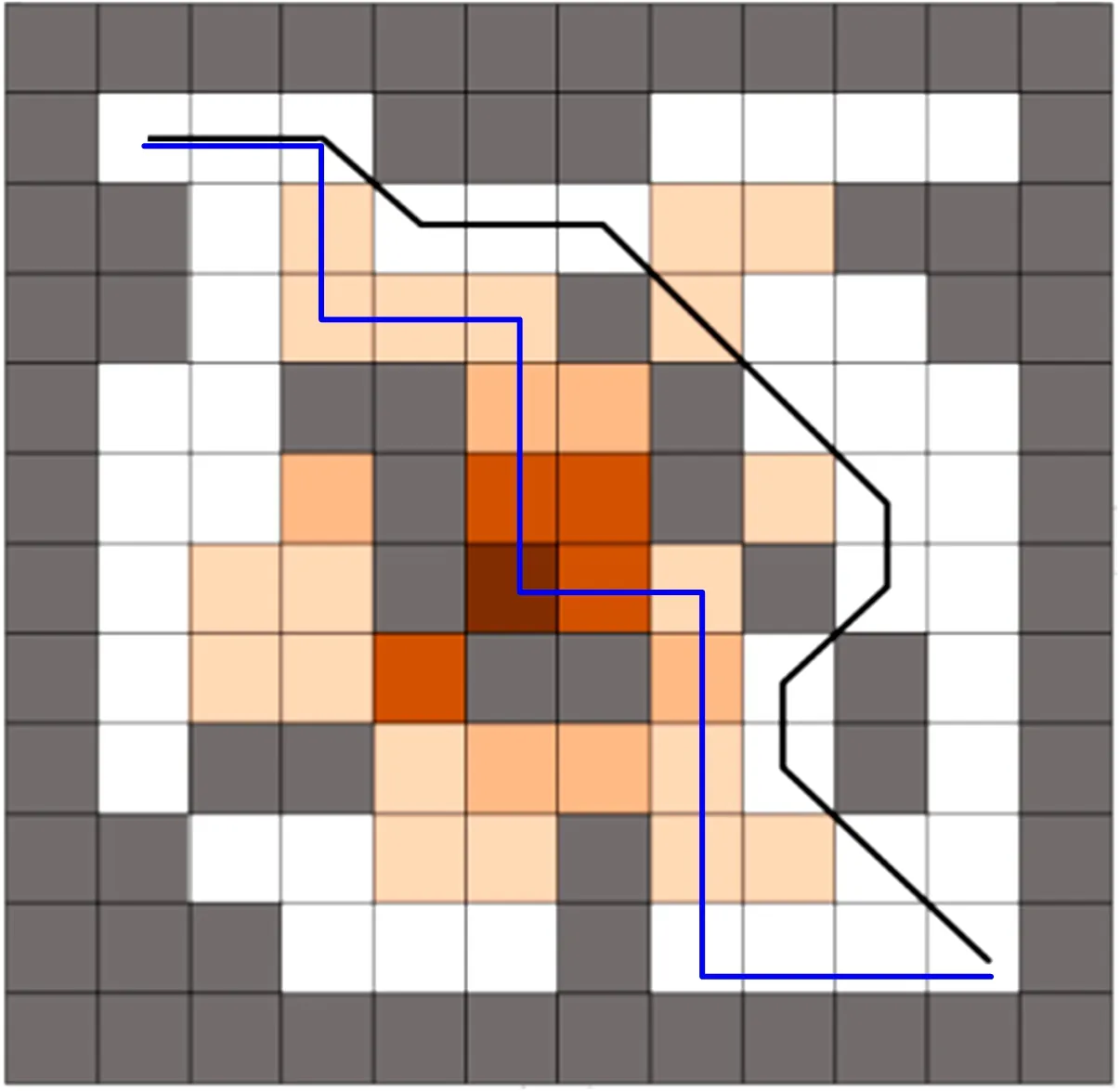
圖5 基于遺傳-蟻群算法的無人機引導(dǎo)疏散路徑規(guī)劃Fig.5 UAV-guided evacuation path planning based on genetic and ant colony algorithm
3 復(fù)雜建筑空間中多無人機協(xié)同搜索引導(dǎo)任務(wù)分配
對于大尺度的建筑空間,單無人機完成整個空間遍歷會很耗時,容易貽誤搜索和引導(dǎo)被困人員疏散的最佳時機,考慮到單無人機往往無法獨立完成大尺度空間的遍歷和引導(dǎo)任務(wù),為提高應(yīng)急救援效率,可以考慮多無人機協(xié)同工作,由多個無人機分別在建筑空間的不同區(qū)域同時進行各區(qū)域內(nèi)的空間遍歷和疏散引導(dǎo)。
實現(xiàn)多無人機協(xié)同搜索引導(dǎo)的核心問題是對建筑空間進行合理地區(qū)域劃分,進而根據(jù)區(qū)域數(shù)量確定協(xié)同無人機數(shù)量。由于現(xiàn)實建筑平面空間多由障礙物和空區(qū)域共同構(gòu)成,而多個障礙物的存在必然會增加單個無人機空間遍歷的復(fù)雜度和轉(zhuǎn)彎折返次數(shù),因此,本文提出基于“障礙物空間場域”的建筑空間區(qū)域劃分方法,具體包括以下3個步驟:
1)將建筑空間平面離散化為元胞節(jié)點,定義2類元胞即障礙物元胞Ci,j和空區(qū)域元胞Ck,其中,i表示障礙物編碼,j表示障礙物中元胞編碼,如圖6所示。
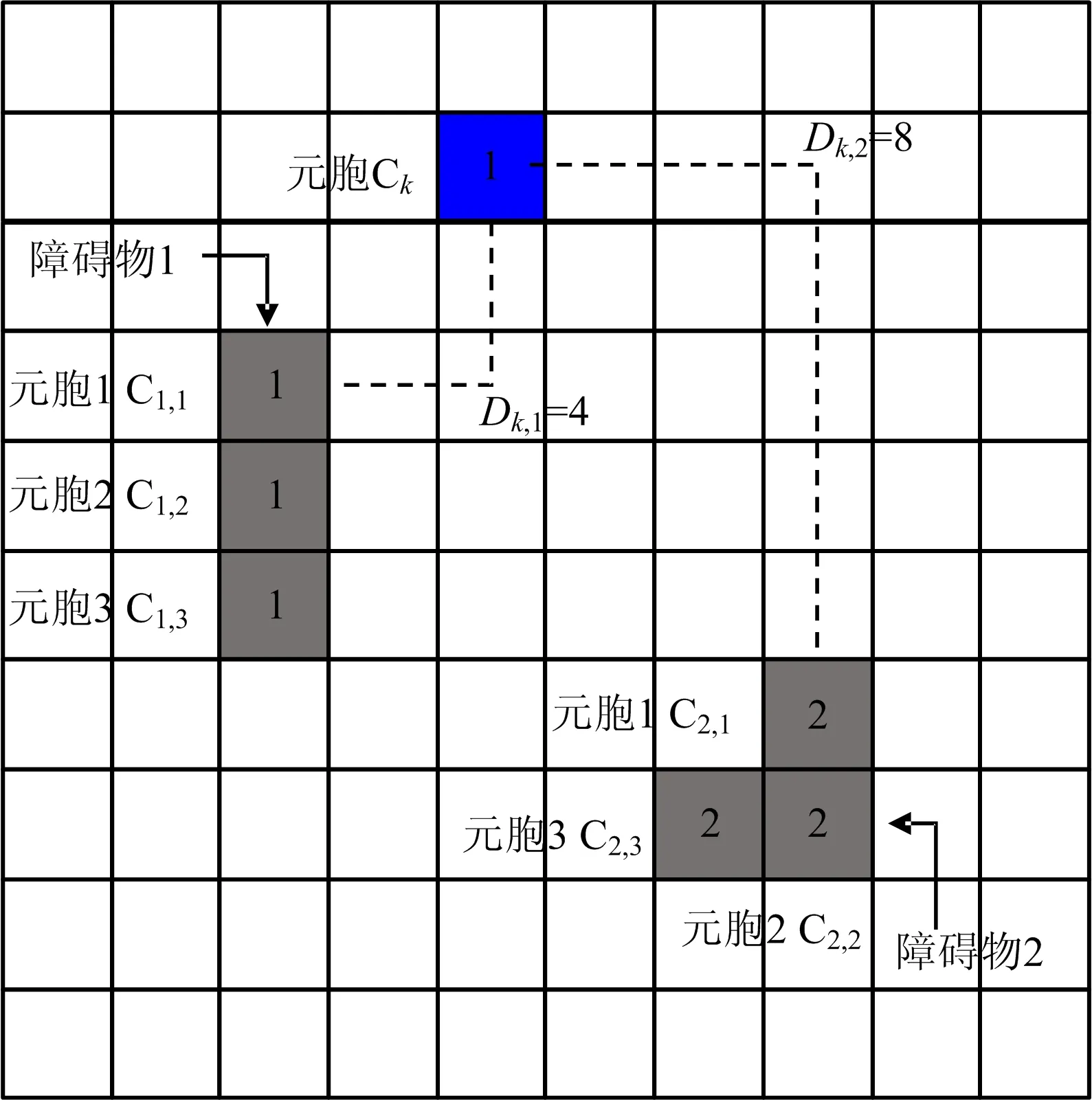
圖6 建筑空間元胞歸屬區(qū)域劃分示意Fig.6 Schematic diagram for attributed region division of building space cells
2)計算任意空元胞Ck與各障礙物之間的曼哈頓距離Dk,i,如式(6)所示:
(6)
3)比較空元胞Ck與各障礙物之間曼哈頓距離Dk,i的最小值,判定空元胞Ck屬于最小值對應(yīng)的“障礙物空間場域”,并用對應(yīng)障礙物編碼i表示場域值Vk,如式(7)所示:
(7)
根據(jù)步驟1)~步驟3),對建筑空間中的空區(qū)域元胞進行劃分,結(jié)果如圖7(a)所示,建筑平面空間中有3個障礙物,該平面空間對應(yīng)地被劃分成“障礙物空間場域”值為1,2,3的3個分區(qū),任一分區(qū)中的任意空元胞在物理距離上只與該分區(qū)內(nèi)的障礙物最近,無人機將能夠以分區(qū)內(nèi)障礙物為參照系進行輻射式空間遍歷,對空間的參照記憶量和邏輯操作量也會有效降低。基于圖7(a)空間分區(qū),可以在各分區(qū)中至少布置1架無人機進行協(xié)同空間遍歷搜索,如圖7(b)所示。在遍歷過程中,任一無人機一旦發(fā)現(xiàn)被困人員,則暫停當(dāng)前遍歷,規(guī)劃最優(yōu)路徑并引導(dǎo)人員完成疏散,再返回自己所在分區(qū)的遍歷暫停點繼續(xù)遍歷剩余空間,直至搜索并引導(dǎo)所有被困人員完成疏散。
4 復(fù)雜建筑空間中人員疏散的無人機引導(dǎo)仿真實驗
集成上述3種方法,對發(fā)生火災(zāi)后多無人機搜救火場被困人員的場景進行仿真實驗研究。為檢驗本文構(gòu)建無人機引導(dǎo)模型的有效性,分別開展沒有無人機引導(dǎo)疏散場景、單無人機引導(dǎo)疏散場景和多無人機協(xié)同引導(dǎo)疏散場景的仿真實驗對比分析。對于沒有無人機場景,被困人員需自行尋找出口,移動規(guī)則為先找到最近的墻壁或障礙物,然后沿墻壁或障礙物移動尋找出口,若移動遍歷完某一墻壁或障礙物,則再移動至另一較近的墻壁或障礙物,依此類推,直至找到出口;對于有無人機場景,無人機先通過遍歷算法尋找其負責(zé)區(qū)域的被困人員,在找到被困人員后,基于遺傳-蟻群算法的路徑規(guī)劃算法,引導(dǎo)被困人員從最優(yōu)路徑抵達出口。構(gòu)建20×20的網(wǎng)格仿真實驗空間并開展仿真實驗,如圖8所示,圖中灰色格子代表障礙物,★代表被困人員所在位置,不同深淺的橙色表示火災(zāi)影響區(qū)域,其覆蓋的格子顏色越深,危險程度越大,路徑長度權(quán)重系數(shù)分別為2,3,4,5,其他顏色表示各無人機的任務(wù)區(qū)域,折線為仿真實驗得到的無人機路徑。
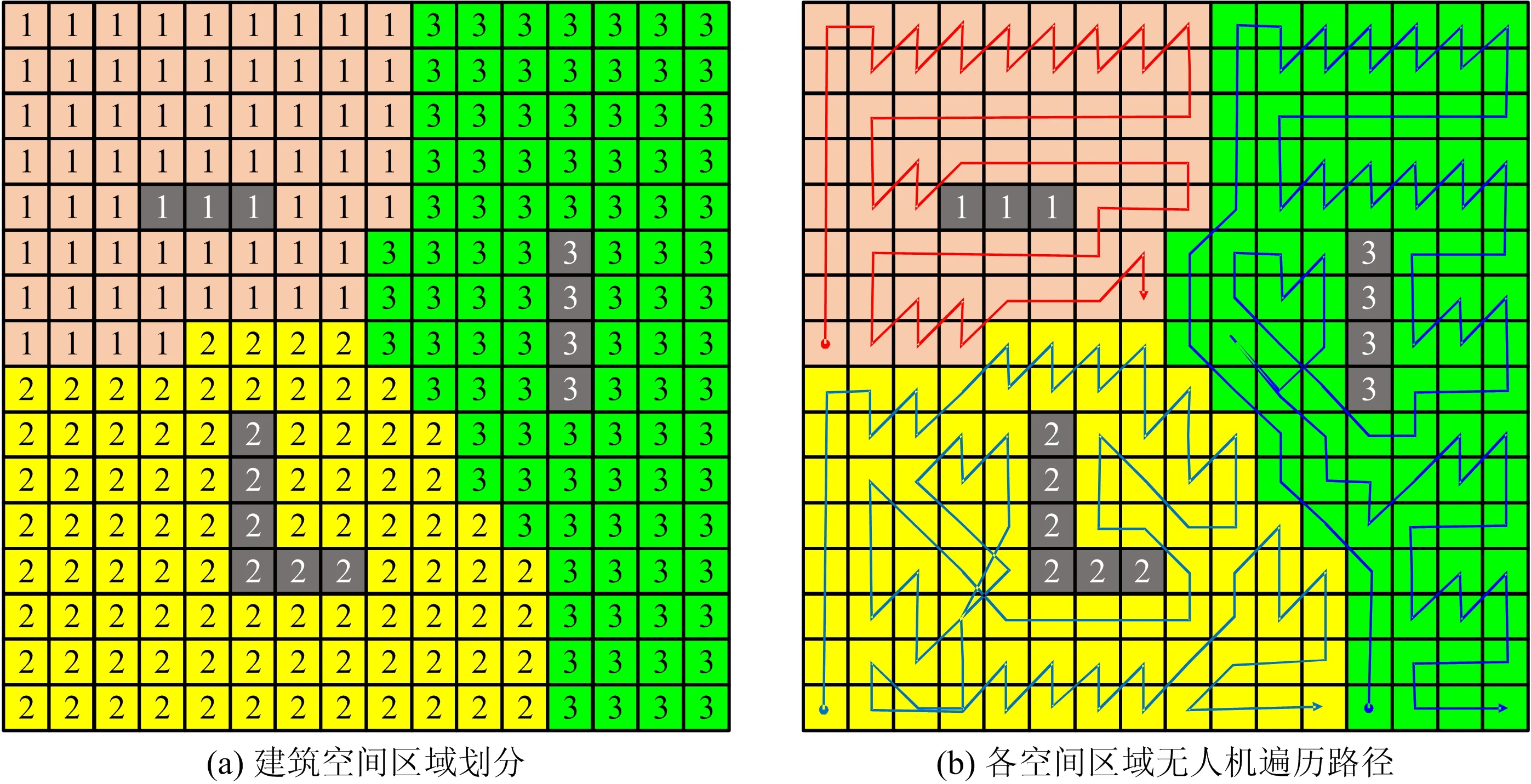
圖7 多無人機協(xié)同引導(dǎo)疏散的空間劃分與路徑規(guī)劃Fig.7 Spatial division and path planning of multi-UAV collaboration guiding evacuation
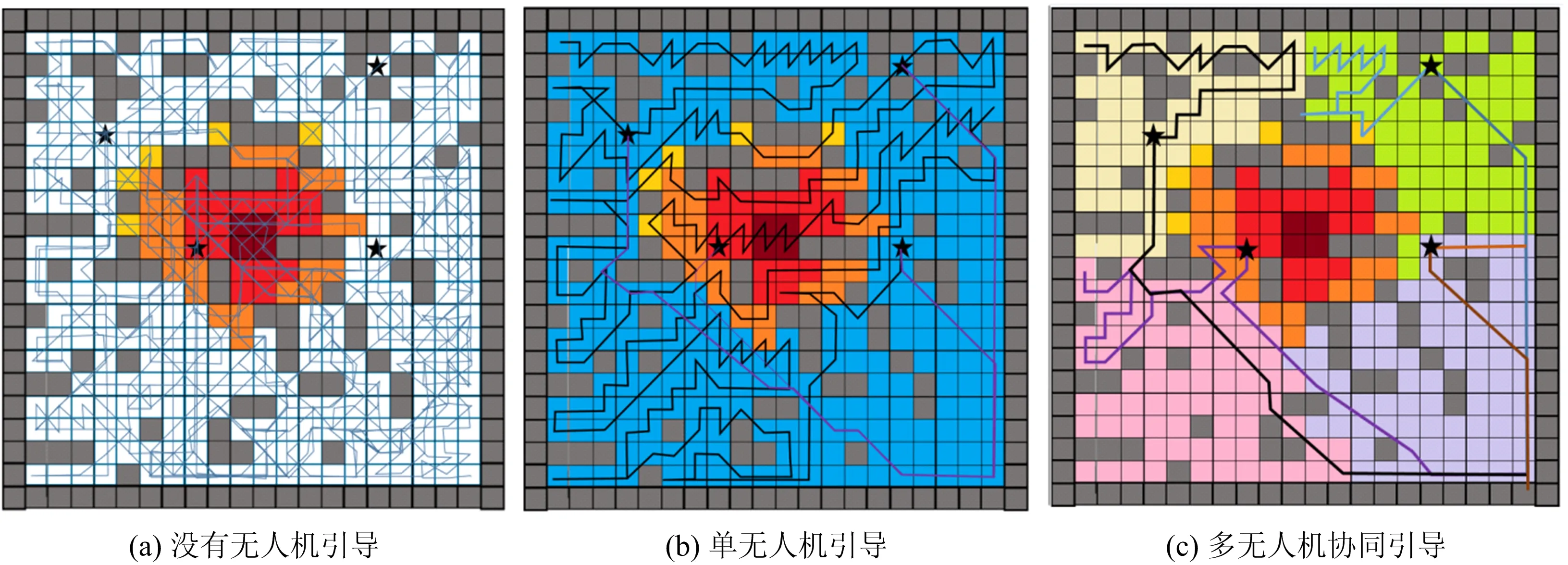
圖8 無人機搜救火場被困人員仿真實驗結(jié)果Fig.8 Simulation experiment results for UAV searching and rescuing of fire trapped personnel
表2給出3種仿真實驗場景計算結(jié)果的對比數(shù)據(jù),在相同環(huán)境下人員自行逃離,由于信息素不足,人員在搜索時容易陷入盲目期,人員容易陷入火場,增加被困人員的危險系數(shù),降低疏散效率;單無人機場景中,無人機運用遺傳-蟻群算法可以保持尋優(yōu)路徑高效求解運算,在考慮安全前提下以最快速度引導(dǎo)被困人員逃離火場,相較自行逃離,疏散時間減少約200%;多無人機場景中,4臺無人機總體疏散時間相較于單無人機縮短7.39倍,相較于自行逃離更縮短14.59倍。同時,在疏散路徑長度和當(dāng)量長度上,多無人機協(xié)同顯著優(yōu)于單無人機,單無人機又顯著優(yōu)于沒有無人機。仿真結(jié)果表明,本文提出的多無人機協(xié)同引導(dǎo)模型在建筑火災(zāi)應(yīng)急救援中,可快速精準(zhǔn)地搜索到最佳路徑,使被困人員快速安全地逃離火場。
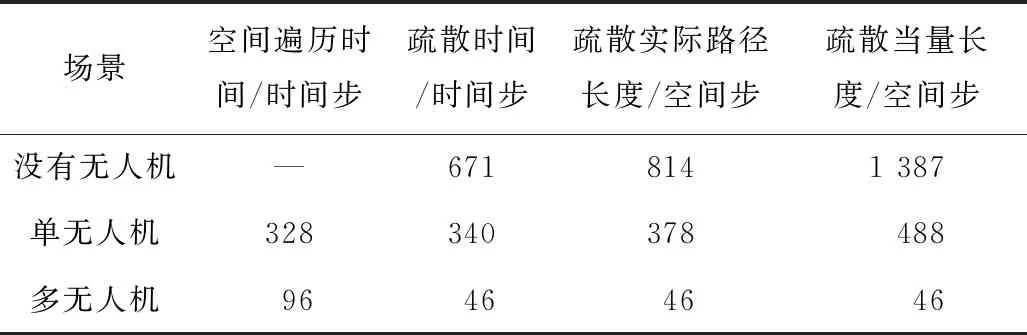
表2 仿真實驗結(jié)果對比Table 2 Comparison of simulation experiment results
5 結(jié)論
1)基于對40 320種移動規(guī)則的對比測試,發(fā)現(xiàn)“左上>上>右上>左>下>左下>右>右下”移動規(guī)則法能夠有效改善無人機空間遍歷路徑轉(zhuǎn)彎次數(shù)多、重復(fù)率過高的問題。
2)無人機空間遍歷“盲區(qū)”策略能夠避免無人機陷入“盲區(qū)”,保證無人機遍歷業(yè)務(wù)的連續(xù)性。
3)基于遺傳-蟻群算法的路徑規(guī)劃算法,可有效避免單純蟻群算法在求解時陷入局部最優(yōu),同時又能夠保證求解后期速度的穩(wěn)定性。
4)基于“障礙物空間場域”的建筑空間區(qū)域劃分方法,可有效實現(xiàn)多無人機的空間任務(wù)分配,提高無人機協(xié)同搜救效率。
5)本文所構(gòu)建的無人機引導(dǎo)模型從理論上探討利用無人機進行復(fù)雜建筑空間人員應(yīng)急疏散引導(dǎo)的可能性,但仍需進一步研究相關(guān)技術(shù)的優(yōu)化和論證無人機的可靠性、可用性、維修性和安全性問題,為無人機引導(dǎo)人員疏散真正應(yīng)用于應(yīng)急實踐提供科學(xué)支撐。
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
文苑(2020年10期)2020-11-07 03:15:36
現(xiàn)代裝飾(2020年6期)2020-06-22 08:43:12
現(xiàn)代裝飾(2020年4期)2020-05-20 08:55:08
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:16
藝術(shù)家(2017年3期)2018-01-26 08:54:49
文學(xué)自由談(2016年3期)2016-06-15 13:01:16
福建農(nóng)業(yè)科技(2016年10期)2016-03-07 09:46:49
少兒科學(xué)周刊·兒童版(2015年6期)2015-11-24 03:49:38
中國工程咨詢(2015年4期)2015-02-14 03:49:56