煤礦巷道三維掃描技術現狀與探索
2022-12-15 13:21:50田偉琴田原索艷春賈曲
礦山機械 2022年12期
田偉琴,田原,2,索艷春,賈曲
1山西天地煤機裝備有限公司 山西太原 030006
2中國煤炭科工集團太原研究院有限公司 山西太原 030006
煤 礦智能化是煤炭工業高質量發展的方向[1]。其中采掘智能化是煤礦智能化的重點,而環境感知、測距定位、掃描探測則是煤礦空間位置探測中不可或缺的部分。
空間位置探測即獲取礦井中的空間三維信息。早在 20 世紀 80 年代,國內外就開始了對礦山三維地質探測的研究,先后出現了 GoCAD、Datamine、Micromine、Surpac、3DMine、Longruan GIS 等眾多礦井三維建模軟件[2]。隨著技術的進步,三維可視化技術已經成為智慧礦山建設必不可少的支撐技術。其中巷道三維信息的獲取是建立礦山空間三維可視化系統的一個重要組成部分。傳統的測繪技術以經緯儀、測距儀、全站儀及 GPS 為主,只能采集單點的三維數據和信息,無法詳盡地反映出煤礦巷道內的復雜情況,難免會丟失許多有用信息。
目前,在巷道空間探測中有學者提出利用測量機器人與雙目視覺相機結合,對巷道進行 360°拍攝獲取巷道全景圖像實現三維重建。然而對于煤礦巷道而言,巷道多為光線不足、內壁紋理稀疏的封閉或部分封閉空間,仍需要人工輔助測量,從而導致誤差增大,影響測量精度。
李梅等人[3-4]認為在快速獲取巷道數據進行三維可視化應用時,可考慮集成 TOF 相機、全景相機、慣導等技術于一體的三維數據采集設備,也可考慮設計全景相機結合防爆手持激光掃描儀等設備,實現對掘進工作面進行三維信息采集,并提出了基于BIM (Geographic Information System) 與 GIS (Building Information Modeling) 的三維建模技術進行巷道建模。
在煤礦巷道空間位置探測中,三維巷道模型的建立基礎即是三維信息的獲取。目前,信息獲取主要包括測距及三維掃描 2 部分。測距是三維掃描的基礎,三維掃描是測距技術的延伸。筆者通過分析煤礦巷道空間位置探測的必要性,總結了三維掃描技術在煤礦中涉及的測距方法,并分析了其在煤巷應用中的研究情況。通過對三維掃描技術的調研及探索,以求為煤礦巷道三維掃描提供范例和經驗借鑒,促進煤礦智能化高效、快速發展。
1 煤礦巷道空間三維掃描的必要性
我國近 95% 的煤礦為井工煤礦,井下潮濕陰暗、能見度極差,在開采中會產生大量粉塵,并且煤礦巷道封閉狹長、多轉角,部分巷道壁凹凸不平,井下設備實現自主定位導航需要適應惡劣的作業和復雜電磁環境。目前,在井下仍有許多崗位需要人工操作,為了在采掘及安全運輸中實現無人化作業和智能監測,構建實時、透明的煤礦智能化平臺,首先就要實現巷道空間位置信息可視化。因而,對煤礦巷道進行空間位置探測,健全三維可視化系統,實現透明工作面勘探及監控技術,對智慧礦山的空間信息平臺建設至關重要。
2 井下測距技術現狀分析
由于井下空氣濕度大、浮塵雜質含量高且電磁環境多變,WiFi、ZigBee、藍牙等測距定位精度并不理想,難以滿足煤礦工作面建設中對各類信息系統高精度定位的要求。目前,在井下應用中主要有超聲波、激光、無線測距傳感器以及毫米波雷達等測距技術。
2.1 超聲波測距定位技術
超聲波測距是發射器向某一方向發射超聲波,接收器接收到遇障礙物返回的信號,記錄發射到接收的時間差,利用公式求解得到發射點到障礙物的距離

式中:v為超聲波在空氣中的傳播速度;Δt為計時器測得的發射波與反射回波的時間差。
李宗偉等人[5]利用電磁波與超聲波在煤礦井下聯合定位,根據超聲波的測距方法進行巷道橫向測距,利用電磁波信號強度的對數常態分布模型進行巷道縱向測距,最終確定目標的二維坐標;付承彪等人[6]基于超聲波測距原理設計了適應于煤礦井下輸送帶糾偏檢測系統,實時檢測輸送帶跑偏。
在煤礦井下,受粉塵、光照以及電磁信號的干擾,超聲波與紅外測距和激光測距技術相比優勢明顯,且具有分辨率高、傳感器體積小、信息處理簡單的優點。但是不足之處在于超聲波只適合近距離測距場合。
2.2 激光測距定位技術
激光測距一般有脈沖法和相位法。脈沖法測距與超聲波測距原理相同,且可以應用于遠距離測距。而相位法測距中,發射點到障礙物的距離
式中:φ為調制后的激光來往返距離上的相位差;f為脈沖頻率。
在相位法測距中需要注意的是,測相是測量調制在激光上面的信號相位,并不是測量激光的相位。這種激光測距方式通常應用于精密測距中。
劉亞輝[7]在煤巷頂底板上安裝了激光測距傳感器進行移近量測量;牛永剛等人[8]設計了一種基于超寬帶 (UWB) 與激光測距的綜采工作面定位系統,采用礦用本安型激光測距傳感器測量定位基站之間的距離。
激光傳感器由于具有測距精確的優點而在井下測量中大量使用,但其成本較高,且需要保證光學系統的潔凈度以實現精確測量。
2.3 無線測距定位技術
通常無線傳感器測距的方法有基于接收信號強度指示 (RSSI)、到達時間 (TOA)、到達時間差 (TDOA)以及到達角度 (AOA) 測距。4 種無線測距方法對比如表 1 所列。
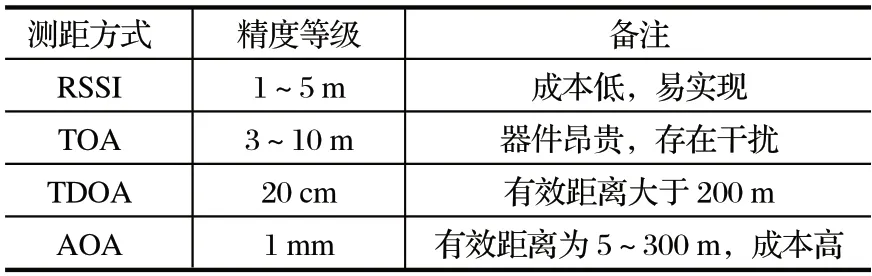
表1 4 種無線測距方式對比Tab.1 Comparison of four kinds of wireless ranging method
在井下無線測距多用 RSSI 測距,根據已知的節點信號發射功率和節點接收的信號功率,通過信號與距離之間的衰減模型,計算出節點間的距離,信號強度

式中:n為信號傳播常數;d為發射端與接收端之間的距離;A為距離發射者 1 m 的信號強度。
李正東等人[9]利用RSSI 和 TOF 測距技術相結合的方式來獲取移動節點與參考節點間的距離信息,確定井下目標精確定位。張傳偉等人[10]提出基于 RSSI算法的無線定位方法,對目前研究算法在煤礦井下巷道應用中出現的誤差情況進行改進,實現 RSSI 算法在斜坡上的測距定位。
RSSI 測距技術不需要額外的硬件,就能夠分析處理復雜的信息,成本低廉,比較適用于無線傳感器網絡的定位系統。
2.4 毫米波雷達測距定位技術
毫米波指波長為 1~10 mm,工作頻率通常為30~300 GHz,介于紅外光波和微波頻段之間的電磁波,具備微波與紅外 光波的某些特征。毫米波波長介于厘米波和光波之間,因此兼有兩者的優點。
毫米波雷達是一項非接觸技術,可用于檢測并提供物體的距離、速度和角度信息。其一般分為連續波和脈沖波 2 種工作體制。脈沖毫米波雷達測距原理與脈沖激光測距相同。
連續波測距原理:通過發射信號和回收信號,將接受到的信號頻率與自身的頻率對比,從而得出雷達與物體之間的相對距離。

式中:T為雷達掃描周期;ΔF為信號帶寬;Δf為混頻輸出頻率差。
作為一種高精度測距技術,毫米波雷達已在諸多領域中有所研究,然而可查詢到的關于礦井應用研究的相關文獻極少,因此需要我們去進一步探索。
3 井下三維掃描技術現狀分析
三維空間信息獲取是煤礦工作面建設中場景監控與可視化支撐平臺的基礎組成部分。目前,煤礦井下的三維數據獲取及三維可視化平臺等核心技術正處于攻堅階段,三維可視化還無法滿足作業現場的實際需求,因此三維掃描技術的應用至關重要。
3.1 三維超聲波掃描技術
超聲波是一種機械波,通過介質中分子的振動進行傳播,介質的密度越大,超聲波傳播速度越快,衰減越少。超聲波掃描是利用超聲波測距的原理,加裝掃描裝置進行掃描。其主要應用于掃描顯微鏡、B超、彩超 (四維)、金屬探傷以及聲納探測中。其在煤礦巷道中使用時,由于在空氣中傳播的超聲波信號衰減嚴重,難以實現有效的掃描探測。
3.2 三維激光掃描技術
三維激光掃描是根據測距原理,利用傳動裝置的掃描運動,完成對物體的全方位掃描,通過一系列處理獲取目標物表面的點云數據,得到被測對象的三維坐標信息,從而建立起物體的三維影像模型。
TomáKot 等人[11]提出了一種煤礦 3D 點云掃描的可視化方法,通過創建獨立 3D 掃描得到點云,之后進行點云數據處理,對速度進行渲染優化,實現了煤礦工作面的測量定位;付忠敏[12]設計了面向礦山環境的三維點云數據采集與處理系統,基于激光掃描原理提出了基于二維激光掃描采集輪廓點云和隨機抽樣一致性算法擬合直線的掘進窗口快速測量方法,可實現井下空間的快速探測。
目前,激光掃描設備受能見度以及黑色表面探測影響較大,在礦井下進行大范圍推廣仍難以實現。另外,點云分辨率和數據采集效率難以同時提高,需進一步研究。
3.3 三維無線傳感器掃描技術
基于測距定位的無線傳感技術屬于靜態測距,需要依靠自身傳感器與移動的定位輔助裝置進行三維掃描,主要應用于防空雷達及航空設備等遠距離掃描中。但是無線傳感器掃描受基站數量以及距離限制,存在信號衰減的問題,且由于傳感器節點的通信和計算能力有限,實現三維定位的算法仍不夠成熟,在煤礦中尚無法實現有效應用。
3.4 三維毫米波雷達掃描技術
毫米波雷達掃描方式一般有旋轉掃描和相控陣列掃描,旋轉掃描是將毫米波雷達固定在轉臺上,通過調節轉臺的機械旋轉得到三維成像數據;相控陣列掃描是通過現有的射頻芯片,采用相控陣天線原理,利用x、y、z平面不同射頻天線的回波相位差實現三維數據掃描。
相比于激光雷達,毫米波雷達掃描具有成本低、抗干擾能力強以及三維點云數量少 1~2 個數量級的特點,使得毫米波雷達在地下、3D 成像和視覺SLAM 領域得到越來越多的關注[13]。傳感器探測方法性能對比如表 2 所列。
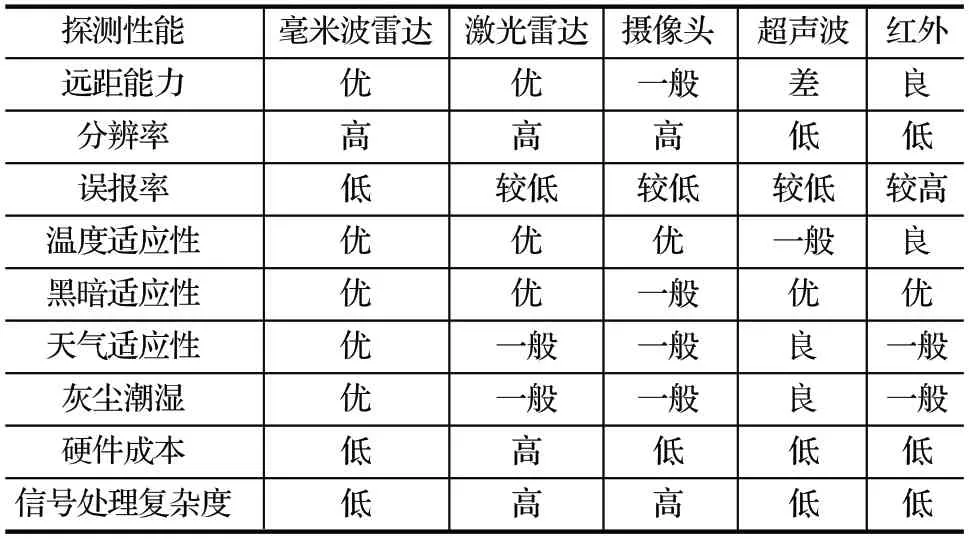
表2 傳感器探測方法性能對比Tab.2 Comparison of various sensing detection methods in performance
目前毫米波雷達已在汽車電子 (如汽車防撞、自適應巡航、自動啟停、盲點監測、行人檢測、自動駕駛)、智慧交通 (如交通卡口、可移動信號燈)、軍事(如導彈制導) 以及人像檢測等領域有了廣泛應用,但卻極少在相關資料中找到毫米波雷達在煤礦井下三維掃描中的應用。
毫米波雷達具有魯棒性好、環境適應性強,對粉塵煙霧穿透能力強、精度高,可全天時、全天候使用的特點,環境適應性及處理能力均優于其他探測方法,適合作為煤礦井下工作面主動式探測傳感器。
隨著煤礦智能化的推進,毫米波環境感知高度集成技術會逐漸發展成熟,實現大規模應用。但是,許多理論和技術仍然需要進一步的研究和探討。
4 結語
通過對煤礦巷道空間位置探測的必要性分析,總結歸納了當前三維掃描技術涉及的井下測距技術,分析了各類三維掃描技術在煤礦巷道中的應用現狀。從查閱到的相關資料分析,認為毫米波雷達在理論上會更適合井下空間位置特征探測,但目前卻極少查找到該項技術在礦井中的使用。因此,需要加強毫米波雷達對煤礦井下進行測距及掃描的技術研究。
猜你喜歡
北京測繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
工業設計(2016年4期)2016-05-04 04:00:23
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年8期)2014-02-27 14:08:07
