兩井間貫通誤差預計及軟件開發★
2022-12-16 08:00:36李付崗胡永峰
山西建筑 2022年24期
關鍵詞:測量
李付崗,胡永峰
(1.冀中能源峰峰集團梧桐莊礦,河北 邯鄲 056200;2.中國礦業大學環境與測繪學院,江蘇 徐州 221116)
目前在綠色礦山與城市地下軌道建設過程中高效精確完成巷道貫通工作具有重要意義。兩井間貫通誤差預計需考慮地面導線測量、聯系測量、井下導線測量和高程測量等誤差預計,人工進行該工作煩瑣復雜且容易出錯,因此利用編程語言快速準確實現貫通誤差預計是非常必要的。本文基于MATLAB平臺開發了一款兩井間巷道貫通誤差預計軟件[1],軟件系統運行穩定,可快速準確得到貫通誤差預計結果[2]。
1 貫通誤差預計原理
1.1 水平方向上的誤差預計原理
1)地面測量誤差對貫通點K的影響。
a.采用導線測量的誤差估算公式:
(1)
b.采用GPS測量時的誤差預計公式:
(2)

2)定向測量對貫通點K的影響:
(3)
(4)
其中,mα0為一井定向誤差;Ry′0風,Ry′0主分別為主井與風井定向時井下導線投影長。
3)井下測角對點K的影響:
(5)
4)井下量邊對點K的影響:
a.采用鋼尺量邊的誤差估算公式:
(6)
b.采用光電測距的誤差估算公式:
(7)
其中,l為井下布設導線邊長;α′為各導線與x′方向之間的夾角;ml為光電測距的量邊誤差,ml=±(A+Bl)。
5)貫通在K點的預計誤差:
(8)
(9)
1.2 豎直方向上的誤差預計原理
1)地面水準測量誤差對貫通點K的影響:
a.誤差估算公式一:
(10)
其中,m0為地面水準測量水準尺讀數中誤差;n為地面水準測量設站數。
b.誤差估算公式二:
(11)
其中,mhL為每千米水準測量高差中誤差;L為地面水準控制測量路線全長。
2)導入高程誤差對貫通點K的影響:
(12)
其中,h為導入高程的井深。
3)井下水準測量誤差對貫通點K的影響:
a.水平巷道水準測量誤差估算公式:
(13)
其中,R為井下水平巷道水準測量線路總長;mhL1為井下每千米水準測量的高差中誤差,依據《煤礦測量規程》為±17.7 mm/km。
b.傾斜巷道三角高程測量誤差估算公式:
(14)
其中,L為井下傾斜巷道三角高程測量線路全長;mhL2為井下每千米三角高程測量高差中誤差,依據《煤礦測量規程》為±50 mm/km。
4)貫通點K高程預計誤差:
貫通高程總誤差為:
(15)
貫通點K的高程預計誤差為:
(16)
2 程序設計實現
2.1 水平方向誤差程序設計實現
2.1.1 導線點點號的編碼規則
兩井貫通測量誤差預計中地面導線測量與地下導線測量使用儀器不同[3-4],需要進行區分;在平巷與斜巷中高程測量使用的儀器可能不同,需要進行區分;在重要巷道要加測陀螺邊提高貫通測量精度,因此也需要區分定向點與非定向點。
導線點點號的編碼規則:
1)地面導線點直接采用正整數1,2,3,4…依次進行編碼。
2)井口近井點采用負整數編號。誤差預計時只需要對聯系測量的兩個近井點進行編號,即-1,-2。
3)井下導線點編號采用四位正整數,用符號“fhdd”表示。
a.符號f用于區分定向點與非定向點,取值為1或2。1為定向點;2為非定向點。
b.符號h為平巷與斜巷的區分標志,取值為0和1。1為斜巷中的點;0為平巷中的點。
c.符號dd為每個井下導線點的區分標志。
d.貫通點K直接由程序給定出。
2.1.2 兩井貫通誤差預計數據獲取
1)在AutoCAD軟件中根據兩井貫通測量任務書以及《礦山測量規范》設計導線網。
2)將設計的導線網數據導出為(*.xls)數據格式文件。
3)在MATLAB軟件中編程直接提取數據。
2.1.3 兩井道貫通算法設計
1)井下測角誤差引起待貫通點誤差預計的方法[5]:
a.井下導線起始點至貫通相遇點K未加入陀螺定向時未加測陀螺定向,按支導線誤差預計公式進行程序編寫。
b.井下導線兩端均為陀螺定向邊,該段導線為方向附和導線,記錄該段導線重心的y坐標,并按附和導線誤差預計公式進行程序編寫。
c.導線一端為陀螺定向邊,記錄該段導線終端點與該段導線各點的y坐標,并按附和導線誤差預計公式進行程序編寫。
2)地面誤差引起待貫通點誤差預計的方法:
a.目前地面聯系測量兩近井點之間通視時,布設D級或E級GPS靜態網足以滿足兩井貫通測量精度需求,選用GPS測量時的誤差預計公式進行程序編寫。
b.兩近井點不通視線時,選用導線測量的誤差估算公式進行程序編寫。
3)量邊誤差引起待貫通點誤差預計的方法:
井下導線測量對貫通點K引起誤差與導線類型無關,根據測量所選的儀器與方法選用相應貫通誤差預計公式進行程序編寫。
2.2 豎直方向誤差程序設計實現
1)水準點號編號規則。
平巷與傾斜巷道對兩井貫通測量誤差預計影響程度不同需加以區分,分別設計程序編程,具體編碼規則為:水準點編號采用四位正整數,用符號“shjj”表示。
a.符號“s”用來區分地面與井下水準點;0為地面水準點,1為井下水準點。
b.符號“h”為平巷與傾斜巷道水準點;0為斜巷水準點,1為平巷水準點。
c.符號“jj”取值1~99,用于區分同一類型水準點。
2)遍歷布設的所有水準點。
a.地面水準點根據實際任意選擇一種誤差估計公式進行編程。
b.平巷中的水準點,采用水平巷道誤差估計公式進行程序設計。
c.斜巷中的水準點,采用相應誤差預計公式進行程序設計。
3 算例與軟件效益分析
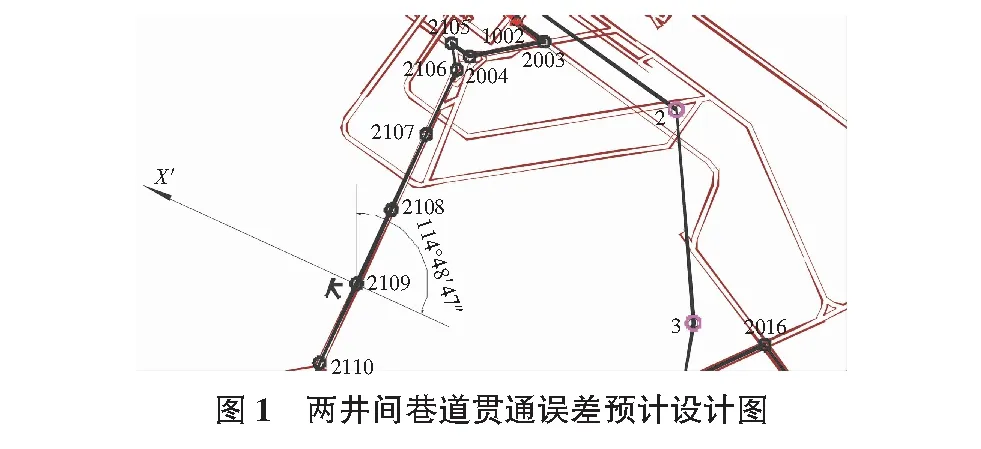
圖1為某礦兩井間巷道貫通局部示意圖[6],點2109為預計貫通點,x′為巷道預計貫通重要方向,其坐標方位角為114°48′47″;共有4個地面導線點、21個井下導線點,近井點1與近井點4之間布設導線全長488 m,導線平均邊長為162.6 m;井下導線全長1 122.4 m,平均邊長為56.1 m。主、副井深度為292.34 m,風井深度為80.86 m。該兩井間巷道的貫通設計了兩套可選方案:
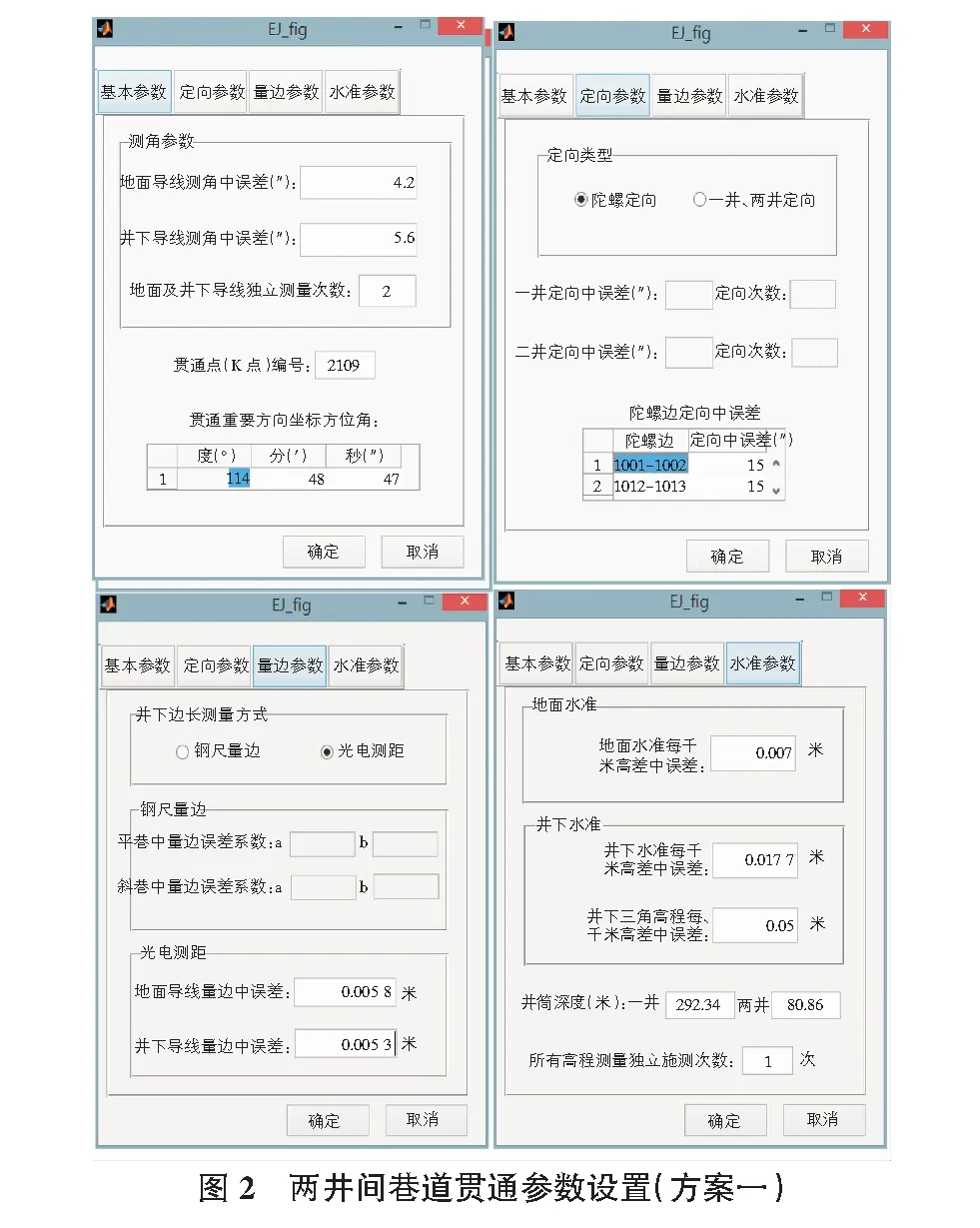
方案一:采用陀螺經緯儀進行定向,量邊使用光電測距。
選取1001-1002,1012-1013,1020-1021三條邊進行陀螺定向,陀螺定向中誤差均為15″。
地面導線測量使用NTS-202全站儀,其測距精度為mD=0.005+5×10-6D,代入地面導線平均邊長D=162.6 m,求得地面量邊中誤差為0.005 8 m。
將井下平均邊長56.1 m,求得井下量邊中誤差為0.005 3 m。
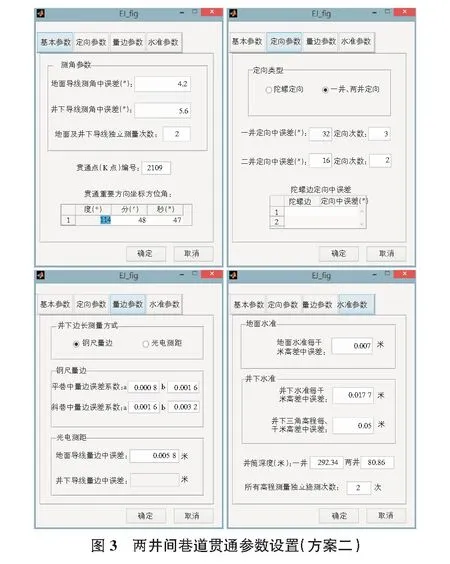
方案二:定向采用一、兩井定向方案,量邊鋼尺量邊。主要參數為:
1)根據礦區以往實測資料,兩井定向誤差為16″,定向2次。
2)一井定向誤差為32″,定向3次。
3)鋼尺量邊偶然誤差系數依據《煤礦測量規程》,平巷:0.000 8,斜巷中:0.001 6。
利用軟件進行貫通誤差預計時,需要設置貫通參數。方案一貫通參數如圖2所示,方案二貫通參數如圖3所示。
導入布設的導線網數據文件,并在軟件中設置好相應貫通參數,雙擊軟件開始界面中的誤差預計,可快速計算出貫通預計點K的預計誤差。貫通預計誤差結果如表1和表2所示。
由表1可以看出,鋼尺量邊與光電測距量邊誤差對貫通相遇重要方向x′方向影響較小,且兩者相差不大。定向誤差對貫通點K預計誤差有較大影響,而采用陀螺經緯儀定向后的誤差比采用一井、兩井定向的預計誤差顯著降低,定向結果更可靠。表2結果表明導入高程與三角高程測量對貫通點高程影響較大,其次方案二在方案一的基礎上增加了一次高程測量的次數,但貫通精度依然滿足工程施工的要求,說明在此條件下,只需進行一次高程測量即可[7-8]。
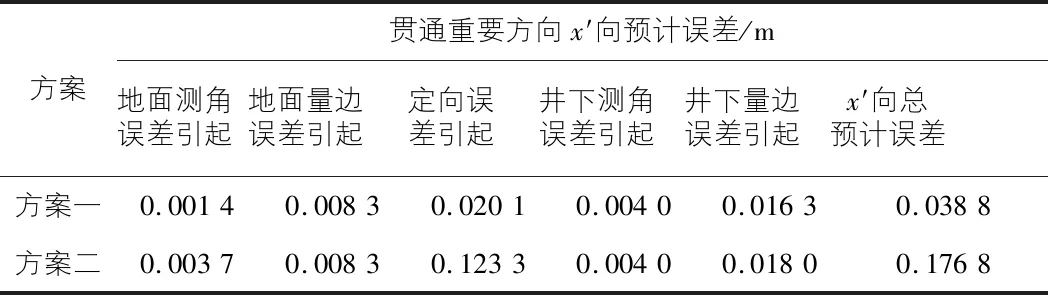
表1 貫通重要方向的預計成果
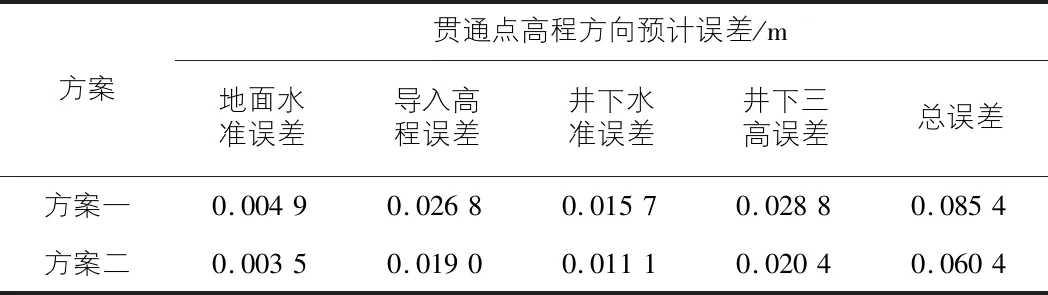
表2 貫通點高程方向的預計成果
由以上理論分析和實例驗證發現,基于MATLAB平臺開發的兩井貫通誤差預計軟件[9-11],利用了MATLAB強大和穩定的數值計算功能,實現了對大型兩井貫通測量重要方向及高程方向誤差預計,具備導線網平差的功能,極大改善今后兩井貫通測量誤差預計的效率與可靠性。
4 結語
本文介紹了兩井間貫通誤差預計的基本原理,詳細闡述了巷道貫通時主要測量誤差對貫通相遇點K的影響與軟件設計的思路及實現其功能的具體過程。并通過具體礦山實例數據對軟件可靠性與準確性進行了驗證,實驗結果表明該軟件可有效提高兩井貫通誤差預計工作效率,確保工程建設的高效性。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00