基于ESO的運(yùn)載火箭電動舵機(jī)位置伺服系統(tǒng)滑模控制
2022-12-16 05:01:06李垚熠翟致恒孫秀耀李朝偉平兆武
彈箭與制導(dǎo)學(xué)報 2022年5期
關(guān)鍵詞:方法
李垚熠,翟致恒,孫秀耀,李朝偉,平兆武
(1 中國航天科工集團(tuán)第四研究院航天科工火箭技術(shù)有限公司,武漢 430040;2 合肥工業(yè)大學(xué)電氣與自動化工程學(xué)院,合肥 230009)
0 引言
運(yùn)載火箭舵機(jī)系統(tǒng)是一個經(jīng)典的位置伺服系統(tǒng),系統(tǒng)通過接受箭載計算機(jī)的控制信號,控制舵機(jī)的轉(zhuǎn)動角度操縱舵面的偏轉(zhuǎn),從而實(shí)現(xiàn)火箭箭體的姿態(tài)控制[1]。與液壓舵機(jī)相比,電動舵機(jī)因其具有結(jié)構(gòu)簡單、體積小、可靠性高、維護(hù)成本低等優(yōu)勢,在航空航天領(lǐng)域得到了越來越廣泛的應(yīng)用[2-4]。永磁同步電機(jī)作為目前十分流行的交流電機(jī),具有響應(yīng)速度快,效率高,轉(zhuǎn)矩慣性比大等優(yōu)點(diǎn),正逐步成為運(yùn)載火箭電動舵機(jī)伺服系統(tǒng)的主流電機(jī)并在高性能位置伺服系統(tǒng)中得到了廣泛的應(yīng)用[5]。PID控制作為一種經(jīng)典的線性控制方法,被廣泛的應(yīng)用到永磁同步電機(jī)的控制中。但是永磁同步電機(jī)不僅是一個多輸入多輸出的非線性系統(tǒng),而且容易受到轉(zhuǎn)矩干擾和參數(shù)變化的影響。這時,PID控制便很難取得令人滿意的控制性能[6-8]。因此,國內(nèi)外學(xué)者提出了許多先進(jìn)的控制算法來解決永磁同步電機(jī)位置控制問題,例如預(yù)測控制[9]、神經(jīng)網(wǎng)絡(luò)控制[10]、內(nèi)模控制[11]等。其中,文獻(xiàn)[9]提出了一種廣義預(yù)測控制方法,該方法能處理磁場減弱與電流受限時的電機(jī)位置跟蹤控制問題,然而該方法需要已知負(fù)載轉(zhuǎn)矩干擾。文獻(xiàn)[10]設(shè)計了一種基于神經(jīng)網(wǎng)絡(luò)的自適應(yīng)位置控制器,該方法可以允許系統(tǒng)參數(shù)與干擾未知,然而該方法沒有考慮電機(jī)運(yùn)行的動態(tài)性能。文獻(xiàn)[11]提出了一種基于非線性內(nèi)模的位置控制方法,該方法可以完全消除穩(wěn)態(tài)跟蹤誤差,然而該方法需要假設(shè)參考信號與干擾信號充分小。文中提出了一種新型的滑模控制(sliding-mode control, SMC)方法并構(gòu)造了一個擴(kuò)張狀態(tài)觀測器(extended state observer, ESO)來估計未知的總擾動,簡稱SMC+ESO方法。相比于基于比例-積分(proportional-integral, PI)的傳統(tǒng)三閉環(huán)控制方法,SMC+ESO方法不僅可以獲得更好的電機(jī)位置響應(yīng)和干擾抑制性能,而且可以解決傳統(tǒng)滑模控制器所存在的抖振問題。仿真結(jié)果驗(yàn)證了該方法的有效性。
1 永磁同步電動舵機(jī)系統(tǒng)模型
永磁同步電動舵機(jī)矢量控制系統(tǒng)通常采用兩相旋轉(zhuǎn)(dq)坐標(biāo)系下的數(shù)學(xué)建模方式,其模型如式(1)所示。
(1)
其中:θr為電機(jī)轉(zhuǎn)子位置,也稱舵偏角反饋;ωr為電機(jī)轉(zhuǎn)速;ud,uq為d,q軸電壓;id,iq為d,q軸電流;L為定子電感;TL為負(fù)載轉(zhuǎn)矩;Rs為定子電阻;J為轉(zhuǎn)動慣量;B為粘滯摩擦系數(shù);Φv為永磁體磁鏈;p為電機(jī)的極對數(shù),電磁轉(zhuǎn)矩Te=1.5pΦv。


圖1 永磁同步電動舵機(jī)矢量控制方法結(jié)構(gòu)框圖
2 SMC+ESO控制器設(shè)計
2.1 滑模控制器設(shè)計
定義永磁同步電動舵機(jī)位置跟蹤誤差為:
e=θd-θr
(2)
其中:θd為參考位置信號,也稱舵偏角指令。對式(2)求導(dǎo)可得速度跟蹤誤差:
(3)
選擇如式(4)形式的滑模面:

(4)
其中:c>0。對式(4)求導(dǎo)可得:
(5)
定義滑模趨近律:
(6)
其中:k>0;δ>0;0<ε<1;x1為系統(tǒng)狀態(tài)。該滑模趨近律具有兩個優(yōu)點(diǎn)[12]:
a)當(dāng)|S|增加時,eq(x1,S)會趨近于k/ε,而不是常數(shù)k,因此該趨近律具有更快的趨近時間;
b)當(dāng)系統(tǒng)軌跡趨近于滑模面時,eq(x1,S)會逐漸減小至0,從而可以抑制抖振現(xiàn)象。
考慮電機(jī)參數(shù)的變化,將式(1)中的位置與速度方程寫為:
(7)

將式(7)與式(6)代入式(5)中可得:
(8)

(9)
2.2 擴(kuò)張狀態(tài)觀測器設(shè)計
考慮到式(9)存在未知的干擾r(t),因此,我們設(shè)計擴(kuò)張狀態(tài)觀測器用于觀測干擾,其形式為:
(10)
其中:γ為位置估計誤差;z1,z2,z3分別為θr,ωr,r(t)的估計值;p0為某個正數(shù)。

(11)
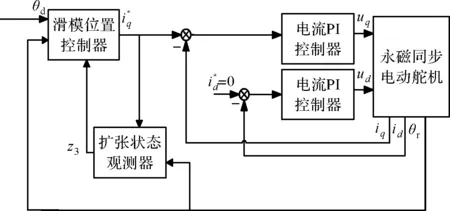
圖2 SMC+ESO控制方法結(jié)構(gòu)框圖

(12)
這保證了所設(shè)計的控制系統(tǒng)是穩(wěn)定的并且任何跟蹤誤差軌跡在有限時間內(nèi)可以收斂到零。
3 仿真分析
通過計算機(jī)仿真來驗(yàn)證所提方法的有效性。同時,給出了基于PI的三閉環(huán)控制方法的仿真結(jié)果用來對比,其結(jié)構(gòu)控制框圖如圖3所示。

圖3 基于PI的三閉環(huán)控制方法結(jié)構(gòu)框圖


表1 電機(jī)參數(shù)標(biāo)稱值

表2 SMC+ESO控制器參數(shù)

表3 PI控制方法控制器參數(shù)
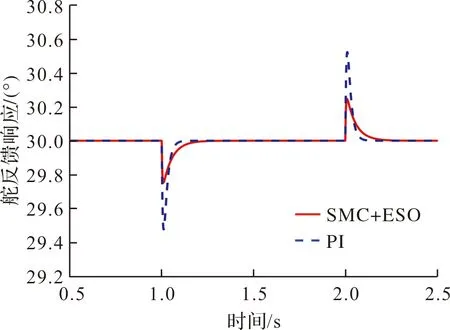
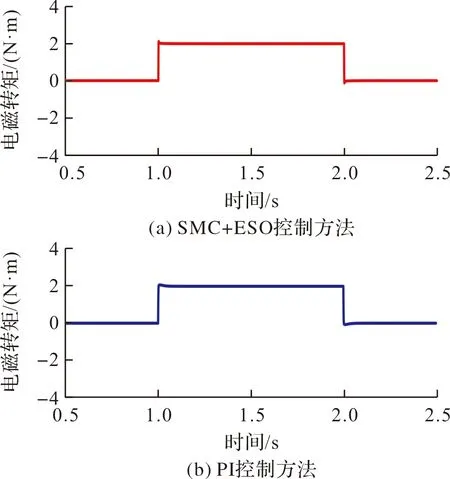
圖4~圖7顯示了舵偏角反饋θr與電磁轉(zhuǎn)矩Te的響應(yīng)曲線。通過分析以上的仿真結(jié)果,可以看出相比于傳統(tǒng)的PI控制方法,所提出的SMC+ESO方法具有更小的超調(diào)量與更短的調(diào)節(jié)時間。此外,針對突加的負(fù)載轉(zhuǎn)矩干擾,SMC+ESO方法具備更強(qiáng)的抗干擾能力與良好的參數(shù)魯棒性。

圖4 舵偏角反饋響應(yīng)曲線(0 s 圖5 電磁轉(zhuǎn)矩響應(yīng)曲線(0 s 圖6 舵偏角反饋響應(yīng)曲線(0.5 s 圖7 電磁轉(zhuǎn)矩響應(yīng)曲線(0.5 s 研究了運(yùn)載火箭電動舵機(jī)位置控制問題。針對永磁同步電動舵機(jī)位置伺服系統(tǒng)快速動態(tài)響應(yīng)能力的需求以及易受到轉(zhuǎn)矩干擾和參數(shù)變化從而導(dǎo)致控制性能變差這一情況,提出了一種基于滑模控制與干擾補(bǔ)償技術(shù)的位置控制方法。該控制方法可以實(shí)現(xiàn)舵機(jī)的快速位置響應(yīng)與干擾抑制。仿真結(jié)果驗(yàn)證了該方法的有效性。
4 結(jié)論
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04河北畫報(2021年2期)2021-05-25 02:07:46中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04兒童繪本(2020年5期)2020-04-07 17:46:30兒童故事畫報(2019年5期)2019-05-26 14:26:14Coco薇(2016年2期)2016-03-22 02:42:52山東青年(2016年1期)2016-02-28 14:25:23Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12小雪花·成長指南(2015年4期)2015-05-19 14:47:56
