一種磁流變阻尼器機械滯后模型建立與實驗驗證
2022-12-20 15:44:24劉月辰黃山云
噪聲與振動控制 2022年6期
劉月辰,黃山云,王 強
(1.中國海洋大學 工程學院,山東 青島 266100;2.元珵科技(北京)有限公司,北京 100070)
磁流變阻尼器(Magnetorheological Damper,MRD)是利用磁流變液的流變可控特性研制的一種半主動阻尼元件,與傳統阻尼器相比,具有能耗低、出力大、響應快速、阻尼力連續可調等優點[1],因此被廣泛應用于半主動控制領域。在利用MRD 進行半主動控制時,研究其動態特性并建立其準確的模型是獲得期望控制力的關鍵。
自MRD誕生以來,學者們對于其準確數學模型的建立進行了大量研究,如偽靜力模型、參數化模型和非參數化模型。但是由于MRD具有強非線性,難以保證模型同時具有較高精確度和較簡單的形式[2]。偽靜力模型很好描述了MRD力與位移的關系,但是對MRD力與速度的非線性關系無法很好描述;非參數化模型的物理意義不明確,過度依賴于實驗數據;參數化模型不僅能夠很好地描述MRD力與速度、位移之間的關系,還具有明確的物理意義,在阻尼器模型的研究中占有重要地位。
對MRD 參數化模型的研究始于偽靜力模型的不足。1987 年,Stanway 提出理想化的力學模型即Bingham 模型,以庫倫阻尼力和黏性阻尼力描述MRD輸出阻尼力的組成,從此基于實驗數據擬合的參數化動力模型開始盛行[3]。之后,各種基于實驗擬合和函數擬合的動力學模型開始出現,其中以Sigmoid函數、Tanh函數等研究較多[4-7]。
本文在前人研究的基礎上,分析多工況下MRD動態實驗曲線,發現MRD在低速狀態和速度變向時輸出阻尼力發生突變,這種現象在多名學者的研究[8-10]中皆有表現。為了建立更加精確的MRD動態模型,針對突變現象進行分析,并基于簡化后的Tanh模型建立MRD 的機械滯后動態模型,為MRD 在穩態輸入下的動態特性描述和半主動控制提供了基礎。
1 試驗與模型的建立
1.1 MRD動力性能測試
采用INSTRON8802 材料性能試驗機對某駕駛室懸置系統用磁流變阻尼器進行動力特性測試,裝置通過力傳感器實時采集輸出阻尼力,通過位移傳感器采集輸入位移,數據保存在數據采集儀內,阻尼器安裝位置和實驗設備如圖1所示。

圖1 MRD動力特性測試裝置
MRD 動力性能實驗中材料性能試驗機的輸入參數如表1所示,總計72種工況。

表1 MRD動力性能測試實驗輸入參數
1.2 MRD動態特性分析
為了更好地研究磁流變阻尼器的動態特性,選取一組激勵頻率和激勵幅值,研究不同電流輸入條件下MRD 的輸出阻尼力與輸入位移和輸入速度的關系,MRD測試曲線如圖2所示。
如圖2(a)所示,阻尼力-位移曲線大致成矩形,其面積為一個周期內阻尼器消耗的能量,記為E。耗能E的值隨電流增大而增大,且為非線性,當通電電流到達0.5 A 時,由于磁場飽和,矩形面積不再增大,此時MRD 輸出阻尼力達到峰值,一個周期內消耗能量達到最大。同時,在活塞位移達到兩個極限值時,阻尼力出現突變,且該現象與輸入電流相關性不大。
如圖2(b)所示,阻尼力-速度曲線表現出明顯的滯回特性,在低速區存在較大的滯回環,且隨著輸入電流的增加,MRD 在低速狀態下滯回環變大,此為MRD的傳統特性。

圖2 激勵頻率為1.5 Hz、幅值為9 mm時MRD測試曲線
1.3 機械滯后模型
通過對72 種工況下得到的實驗數據進行分析可知,MRD 在低速狀態和速度方向改變時,阻尼力會出現突變現象。研究發現,阻尼力的突變主要是由機械系統的剛度突變引起的,而機械系統剛度的突變受阻尼器的間隙和系統柔度的影響較大。
為了準確表示磁流變阻尼器的阻尼力突變特性,以彈性壓縮階段、流變阻尼階段、彈性釋放階段和間隙跳躍階段共4 個階段劃分MRD 在循環載荷激勵下的工作狀態,并基于此工作模式和簡化后的雙曲正切模型建立基于機械滯后的MRD動力模型,簡稱為DSTH模型,具體劃分如圖3所示[11]。

圖3 MRD動態特性4個階段劃分圖
假定磁流變阻尼器自A 點開始工作,此時活塞處于極限位置,將活塞受壓縮所儲存的力記為彈性力,將活塞與缸體之間的力記為阻尼力。A→B 階段:活塞速度由0 逐漸增大,此時處于彈性壓縮階段,彈性力小于阻尼力,活塞位置基本不變;B→C階段:活塞到達B狀態時,此時彈性力增大到與阻尼力相等,活塞在B點之后開始移動,此時阻尼器處于流變狀態,即流變阻尼階段,到達C點速度降為0;C→D 階段:活塞到達C 點后,活塞開始換向,但是由于阻尼力的存在,活塞位置基本不變,A→B 階段儲存的能量在此階段釋放,直到彈性力等于阻尼力,此時活塞將位于D 點,此階段為彈性釋放階段。圖4 所示為MRD工作時的4種狀態,以上階段對應磁流變阻尼器處于圖4(b)和圖4(c)兩種狀態,兩狀態均可分為3個步驟:對于圖4(b)來說,此時活塞與活塞桿的間隙為0,彈性元件kc開始被拉長,即為拉長儲能狀態,當Fc=Fb時,活塞開始移動,即為流變阻尼階段,此時Fc≥Fb,當再次達到Fc=Fb時,彈性元件kc由拉長狀態逐漸回復到原長,此為放能階段;對于(c)來說,步驟相同,但儲能方式可理解為壓縮儲能。對于以上階段傳統模型均能準確描述,如Tanh模型等。D→E 階段:此階段由于間隙的存在,活塞桿移動速度很快,稱為跳躍現象,到達E 點,此階段稱為間隙跳躍階段,如圖4所示,彈性元件kc基本處于原長狀態,此時MRD處于圖4(a)和圖4(d)兩種狀態,以間隙中點為分界線,此階段為間隙跨越階段;E→A為4個階段的重復。

圖4 機械滯后模型的4種狀態
根據所劃分階段建立DSTH 模型示意圖如圖5所示。
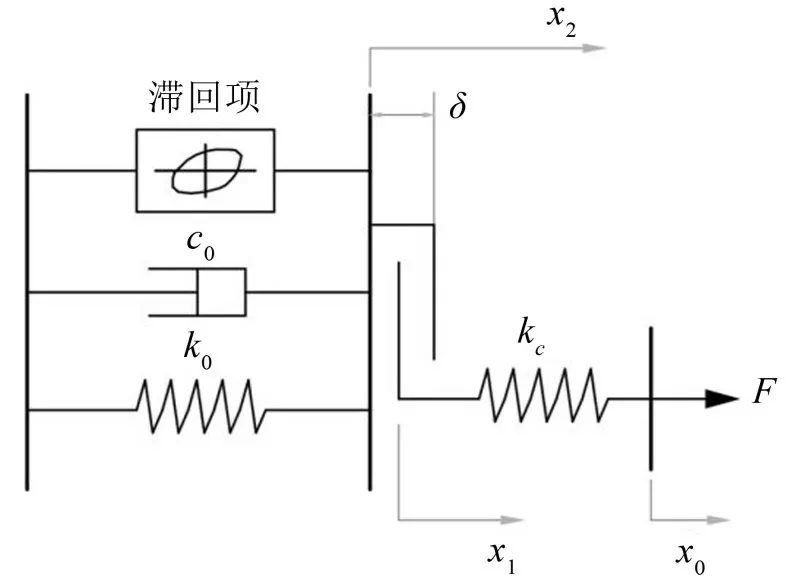
圖5 DSTH模型示意圖
建立DSTH數學模型如式(1)、式(2)所示。

式(1)、式(2)中:δ為間隙量;L0為彈性元件kc的原始長度;c0、k0、α為與電流有關的變量;x0、x1、x2為與活塞和活塞桿運動有關的位移;Fc為彈性力;Fb為磁流變阻尼力;F0為間隙跳躍時的力。
對72 組實驗數據進行分析,發現δ與kc的值與激勵條件等無關,且在該MRD中取值約為0.001 m、6.5×106N/m,而k0通過計算也證明其可以忽略,L0可以在初始化過程中舍去。
2 模型對比分析
為了使對比結果更加具有普遍性,選取9 mm、1 Hz工作情況下輸入不同電流時的試驗測試結果,繪制計算結果與實驗數據對比圖。
2.1 Bingham模型
基于磁流變液的Bingham 偽靜力學模型,利用階躍函數來區分描述活塞拉伸及壓縮行程,Stanway[11]等提出了非線性的動力學模型,該模型由一個庫侖力和一個黏性力組成,來描述磁流變阻尼器的阻尼力特性。Bingham模型是較為常用的磁流變阻尼器動力學模型,其模型表達式如式(3)所示。

式中:c0為阻尼系數,fc是與磁流變液屈服應力有關的庫倫阻尼力,f0是由于補償器存在而產生的力,可忽略。
Bingham 模型認為磁流變液在屈服前是剛性的,即磁流變液受力小于屈服應力時,不會產生變形,這大大簡化了模型的復雜程度,使Bingham模型每個參數都有真實的物理意義,本文簡稱Bingham模型為BH模型。
利用MATLAB 遺傳算法工具箱,識別BH 模型中主要參數,擬合模型計算結果與實驗數據對比圖如圖6 所示,結果表明:BH 模型對速度與阻尼力的關系描述精度不足,特別是在低速時,無法描述MRD的滯回特性。

圖6 MRD特性實驗與BH模型計算曲線對比
2.2 Sigmoid函數模型
Sigmoid 函數的曲線與磁流變阻尼器庫倫阻尼力-速度曲線的線型非常接近,因此,可以用Sigmoid函數的表達式描述磁流變阻尼器的動態特性,庫倫阻尼力如公式(4)所示[12]。

式中:Fm表示最大屈服力,β表示指系數且大于零,Fm和β是電流和振幅的系數,表示速度。考慮黏性阻尼力,輸出阻尼力如式(5)所示。

如圖7 所示,對比實驗數據與SMD 模型的計算數據,結果表明:SMD模型相比BH模型有效地改善了低速時模型的描述精度,同時很好地擬合了高速時的特性。

圖7 MRD特性實驗與SMD模型計算曲線對比
2.3 Tanh模型
磁流變阻尼器的雙曲正切模型只有一個,用來表述滯后的雙曲正切函數參數較少,模型相對簡單,對部分磁流變阻尼器同樣有較好的建模精度。阻尼和剛度則具有線性特性,簡稱為TH 模型[13],其阻尼力如式(6)所示。

式中:c為黏性阻尼系數,k為彈性系數,α為滯環高度系數,β為滯環陡度系數,delta為滯環寬度系數,f0為因補償器存在而產生的力,均為電流的函數。
如圖8所示,對比實驗數據與TH模型的計算數據,結果表明:TH 模型比SMD 模型具有更高的精度,而且曲線連續光滑。

圖8 MRD特性實驗與TH模型計算曲線對比
2.4 簡化的Tanh模型
為了簡化對MRD 半主動控制過程中逆模型的求解,由于參數β、δ受電流影響不大,可以將雙曲正切函數中的參數β、δ假定為常數,得到簡化的Tanh模型(簡稱STH模型),其表達式如式(7)所示[14]。

如圖9所示,STH模型保留了TH模型高速時對MRD 動態特性的描述精度,且降低了參數的復雜度。

圖9 MRD特性實驗與SBH模型計算曲線對比
2.5 機械滯后模型
如圖10 所示,對比實驗數據與DSTH 模型的計算數據,結果表明:DSTH模型不僅具有STH的描述精度,同時對阻尼力突變現象具有很好的描述。

圖10 MRD特性實驗與DSTH模型計算曲線對比
3 模型精度對比分析
本文將實際阻尼力與計算阻尼力的絕對誤差的均方根值作為精度的判定標準,取3 個典型的運行周期的平均值作為某一工況下的模型誤差,其表達式如式(8)所示。

其中:Ek為第k種激勵工況下模型誤差;Fij為i種電流工況下的第j個計算阻尼力值;fij為第i種電流工況下的第j個實驗阻尼力值。
5 種模型的精度結果如圖11 所示,從圖中可以看出,BH模型誤差最大,最小誤差為0.15,最大誤差為0.24,平均誤差為0.19;SMD 模型誤差次之,最小誤差為0.11,最大誤差為0.23,平均誤差為0.15;TH模型和STH 模型具有較高的精度且兩者相差不大,平均誤差約為0.086;DSTH模型精度最高,平均誤差約為0.741。

圖11 5種模型的精度曲線
4 結語
本文基于MRD 動態特性實驗中出現的阻尼力突變現象,提出了一種體現機械滯后的MRD動態模型,并基于實驗測試和模型擬合,將絕對誤差的均方根值作為精度評價標準,對比了BH 模型、SMD 模型、TH模型、STH模型和DSTH模型的模型精度,結果表明:
(1)DSTH模型很好地描述了MRD在穩態諧波激勵下出現的阻尼力突變現象,提高了模型在低速狀態時對MRD動態特性的描述精度。
(2)與其它模型相比,DSTH 精度較高,為以后基于MRD 的半主動控制提供了較為精確的模型參考。
(3)與STH模型相比,DSTH模型增加了求解參數個數,且具有分段函數,增加了模型的復雜性,求逆較為困難。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
