航行體開槽包裹式緩沖頭帽結(jié)構(gòu)設(shè)計(jì)及其降載性能*
2022-12-21 08:30:58劉振鵬高興甫
爆炸與沖擊 2022年12期
施 瑤,劉振鵬,潘 光,高興甫
(1. 西北工業(yè)大學(xué)航海學(xué)院,陜西 西安 710072;2. 西北工業(yè)大學(xué)航海學(xué)院無(wú)人水下運(yùn)載技術(shù)工業(yè)和信息化部重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710072)
隨著軍事科技的發(fā)展,各種新型的軍事武器裝備不斷出現(xiàn),其中采用固定翼飛機(jī)、直升飛機(jī)投放或火箭助飛等新型發(fā)射方式的跨水空介質(zhì)航行體具有防區(qū)外發(fā)射、突防能力強(qiáng)及隱蔽性高等優(yōu)點(diǎn),成為了軍事武器裝備發(fā)展的熱點(diǎn)。攻擊過(guò)程中,需要由空中彈道轉(zhuǎn)變?yōu)樗袕椀溃擃惡叫畜w將經(jīng)歷一個(gè)跨介質(zhì)高速入水的過(guò)程。在該過(guò)程中,由于介質(zhì)密度的突變以及復(fù)雜的湍流流動(dòng)等原因,航行體將承受巨大的沖擊載荷,引起殼體結(jié)構(gòu)的動(dòng)態(tài)響應(yīng),導(dǎo)致殼體結(jié)構(gòu)發(fā)生彈塑性變形,甚至造成斷裂、破損和屈曲;或?qū)叫畜w的彈道軌跡產(chǎn)生影響,致使航行體入水過(guò)程中發(fā)生忽撲、跳水和彈道失控等嚴(yán)重問題。因此,減小航行體高速入水時(shí)受到的沖擊載荷,確保安全入水,是至關(guān)重要的。
比較常見的降載方法有:在航行體尾部掛載降落傘,降低入水速度并穩(wěn)定空投彈道[1-2];利用航行體的頭部噴出氣體,緩和入水沖擊環(huán)境[3-5];在航行體頭部安裝一個(gè)氣囊[6]或者緩沖頭帽,利用材料的變形和破碎來(lái)吸收航行體高速入水過(guò)程中承受的巨大沖擊能量。嚴(yán)忠漢[7]討論了入水彈頭緩沖材料的動(dòng)態(tài)特性,提出了切片法、臨界設(shè)計(jì)狀態(tài)等概念,這些概念對(duì)后續(xù)緩沖頭帽的設(shè)計(jì)具有重要意義。王永虎等[8]引進(jìn)了聚氨酯泡沫塑料在沖擊加載條件下的本構(gòu)關(guān)系式,代替了傳統(tǒng)的三段式經(jīng)驗(yàn)?zāi)J剑治隽撕叫畜w垂直入水情況下緩沖器的動(dòng)態(tài)緩沖特性。早期,對(duì)于緩沖頭帽的研究大多基于實(shí)驗(yàn)研究,或者對(duì)單一的緩沖材料特性進(jìn)行分析。實(shí)驗(yàn)研究存在耗資昂貴、可重復(fù)差等問題,對(duì)單一緩沖材料的特性分析反映到實(shí)際的入水過(guò)程中存在較大的局限性,因此如今對(duì)于緩沖頭帽的研究大多基于數(shù)值計(jì)算手段。其中比較常用的算法為任意的拉格朗日-歐拉(arbitrary Lagrangian-Eulerian, ALE)算法[9],該算法為解決作用過(guò)程復(fù)雜的水氣固多介質(zhì)耦合問題提供了新的求解思路。Wang 等[10]研究了輕型金字塔夾層板結(jié)構(gòu)低速入水時(shí)的流固耦合動(dòng)態(tài)響應(yīng),獲得了沖擊壓力和結(jié)構(gòu)變形的特性。李建陽(yáng)等[11]通過(guò)對(duì)大型返回艙入水時(shí)不同工況的數(shù)值計(jì)算,分析了入水速度和入水角度對(duì)沖擊載荷特性的影響。胡明勇等[12]建立了低亞聲速射彈垂直入水的流固耦合數(shù)值計(jì)算模型,對(duì)入水空泡、流場(chǎng)與彈道間的多介質(zhì)耦合問題進(jìn)行了數(shù)值求解。顏彬等[13]在考慮彈體內(nèi)部支撐結(jié)構(gòu)的情況下,對(duì)彈體入水時(shí)結(jié)構(gòu)的力學(xué)響應(yīng)進(jìn)行了數(shù)值計(jì)算。Wu 等[14]對(duì)裝備緩沖頭帽的射彈的入水過(guò)程進(jìn)行了數(shù)值計(jì)算,提出了計(jì)算射彈入水過(guò)程中減速度的經(jīng)驗(yàn)公式。Li 等[15]對(duì)裝備緩沖頭帽的航行體的入水過(guò)程進(jìn)行了數(shù)值計(jì)算,重點(diǎn)研究了入水過(guò)程中罩殼的變形失效形式。魏海鵬等[16]對(duì)適用于直徑為324 mm 的航行體的緩沖組件進(jìn)行了數(shù)值研究,發(fā)現(xiàn)在撞水時(shí)罩殼的頭部和預(yù)置溝槽處會(huì)出現(xiàn)明顯的應(yīng)力集中現(xiàn)象,分層的緩沖泡沫出現(xiàn)了二次緩沖等現(xiàn)象。
對(duì)于航行體入水緩沖頭帽的研究不乏公開報(bào)道,但是現(xiàn)有的研究主要是針對(duì)于直徑為324 mm 的小尺度航行體入水情形,適用于大尺度航行體高速安全入水的緩沖頭帽結(jié)構(gòu)設(shè)計(jì)及其降載性能分析研究較少。直徑為533 mm 的大尺度航行體在高速入水時(shí),所面臨的沖擊環(huán)境更為極端,流體對(duì)航行體殼體結(jié)構(gòu)的作用更為劇烈,小尺度航行體降載結(jié)構(gòu)的相關(guān)設(shè)計(jì)理論難以直接應(yīng)用于大尺度航行體。
本文中,利用LS-DYNA 軟件,并基于ALE 算法,建立裝備緩沖頭帽的航行體高速入水?dāng)?shù)值模型,對(duì)適用于大尺度航行體高速入水的開槽包裹式緩沖頭帽的緩沖性能進(jìn)行數(shù)值研究,探究其緩沖性能的相關(guān)影響因素,以期為新型緩沖頭帽的結(jié)構(gòu)設(shè)計(jì)提供指導(dǎo)。
1 緩沖頭帽
根據(jù)魚雷緩沖頭帽設(shè)計(jì)可行域[17],本文中所設(shè)計(jì)的緩沖頭帽主要由外部開槽罩殼和內(nèi)部緩沖材料組成。罩殼可以承受航行體投放時(shí)的氣動(dòng)壓力,保證緩沖頭帽在入水之前整體結(jié)構(gòu)的完整性,同時(shí)使裝備緩沖頭帽的航行體在空中飛行時(shí)阻力較小,提高航行體的飛行速度,增大航行體的投送距離;緩沖材料在入水過(guò)程中依靠自身變形吸收巨大的沖擊能量,從而降低作用在航行體上的沖擊載荷。
1.1 罩 殼
航行體的外形參考魚雷MK48,最大直徑為533 mm,總體長(zhǎng)度為5 850 mm,如圖1 所示。為了保證裝備緩沖頭帽后的航行體具有良好的氣動(dòng)外形,本文中所設(shè)計(jì)的罩殼采用尖拱體外形,罩殼圓柱段外徑為555 mm,厚度為5 mm,尖拱段長(zhǎng)度為600 mm,圓柱段長(zhǎng)度為700 mm,如圖2所示。為了減小緩沖頭帽對(duì)航行體入水彈道的影響,使它更容易與航行體分離,沿罩殼的周向開8 個(gè)強(qiáng)度減弱槽,軸向開槽長(zhǎng)度為900 mm,開槽深度為3 mm,軸向開槽角度為15°,如圖3 所示。

圖1 航行體外形Fig. 1 Shape of the vehicle
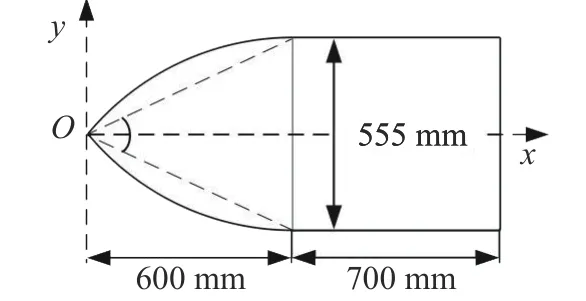
圖2 罩殼外形Fig. 2 Shape of the nose cap
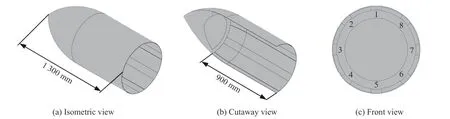
圖3 罩殼開槽示意圖Fig. 3 Schematic diagrams of the slotted nose cap
1.2 緩沖件
本文中設(shè)計(jì)了一種開槽包裹式緩沖件,如圖4 所示,緩沖件內(nèi)部線型與航行體頭部線型一致,能夠完全包裹航行體頭部曲線段,二者接觸面積大,在航行體入水角度較小時(shí),可以有效地保護(hù)航行體頭部殼體設(shè)備。同時(shí),為了避免緩沖件被壓實(shí)后不容易破碎的問題,沿緩沖件周向均勻開8 個(gè)槽,開槽底部距離緩沖件前端100 mm,緩沖件開槽前端深度為50 mm,緩沖件包裹段后端厚度為6 mm,開槽深度為3 mm。罩殼主要發(fā)生撐進(jìn)破壞[17],適當(dāng)增大罩殼前段厚度有利于它破碎,因此緩沖件前端向后縮進(jìn)一部分,罩殼前段加厚。航行體裝備緩沖頭帽后的整體示意圖如圖5 所示。
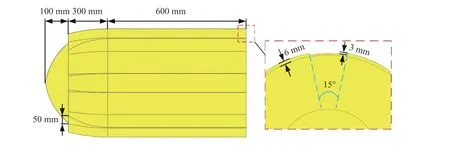
圖4 開槽包裹式緩沖件Fig. 4 A slotted wrapping buffer
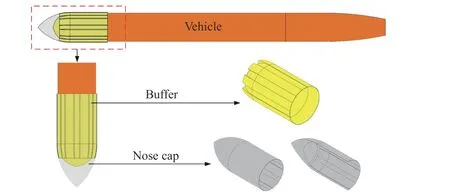
圖5 航行體裝配緩沖頭帽后整體Fig. 5 The whole body of the vehicle assembled with the buffer head cap
2 計(jì)算模型
有限元算法中比較常見的算法有拉格朗日算法與歐拉算法以及任意的拉格朗日-歐拉算法(ALE 算法)。拉格朗日算法的網(wǎng)格會(huì)隨著物質(zhì)進(jìn)行運(yùn)動(dòng),對(duì)結(jié)構(gòu)邊界的捕捉比較精確,但是當(dāng)結(jié)構(gòu)發(fā)生大變形時(shí),可能導(dǎo)致網(wǎng)格出現(xiàn)畸變的現(xiàn)象,引起計(jì)算結(jié)果不準(zhǔn)確。歐拉算法的網(wǎng)格是固定不動(dòng)的,物質(zhì)在網(wǎng)格之間進(jìn)行輸運(yùn),對(duì)網(wǎng)格的變形沒有限制,但對(duì)于結(jié)構(gòu)邊界的捕捉精度不夠。對(duì)于航行體高速入水的問題,選擇ALE 算法進(jìn)行求解,發(fā)揮二者的優(yōu)勢(shì),利用拉格朗日網(wǎng)格求解航行體及緩沖頭帽的變形破碎,捕捉精度高,利用歐拉網(wǎng)格來(lái)求解自由液面的大變形,數(shù)值計(jì)算穩(wěn)定。
2.1 ALE 算法基本原理
ALE 算法的控制方程由質(zhì)量守恒方程、動(dòng)量守恒方程和能量守恒方程組成[18]。
(1)質(zhì)量守恒方程:

式中:ρ 為流體的密度;x為歐拉坐標(biāo);v為流體的速度;u為網(wǎng)格的速度;w=v-u;E為流體的內(nèi)能;σij為應(yīng)力張量的分量;b為流體所受的體積力載荷。
ALE 算法的基本實(shí)現(xiàn)過(guò)程如下[19]:
(1)先進(jìn)行拉格朗日步計(jì)算,單元網(wǎng)格隨著材料運(yùn)動(dòng)而變形,保持變形后的物體邊界條件,對(duì)內(nèi)部重新劃分網(wǎng)格,網(wǎng)格的拓?fù)潢P(guān)系保持不變,稱為光滑步。
(2)將變形網(wǎng)格中的單元變量和節(jié)點(diǎn)速度矢量輸運(yùn)到新網(wǎng)格中,稱為對(duì)流步。一般每個(gè)單元解的各種變量都要進(jìn)行輸運(yùn),要輸運(yùn)的數(shù)量取決于材料模型。
ALE 算法中流固耦合力計(jì)算方法如圖6 所示。對(duì)于結(jié)構(gòu)節(jié)點(diǎn),在每一時(shí)間步通過(guò)相對(duì)速度(vs-vf)更新侵徹深度d,結(jié)構(gòu)節(jié)點(diǎn)定義為從節(jié)點(diǎn),流體節(jié)點(diǎn)定義為主節(jié)點(diǎn),使用流體單元的等參坐標(biāo)計(jì)算主節(jié)點(diǎn)的位置。當(dāng)t=0 時(shí),假定d(0)=0,流體節(jié)點(diǎn)和結(jié)構(gòu)節(jié)點(diǎn)重合;當(dāng)t(n)=t(n-1)+Δt,侵徹向量通過(guò)下式更新:
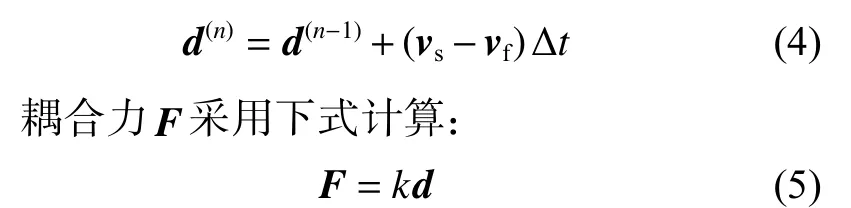
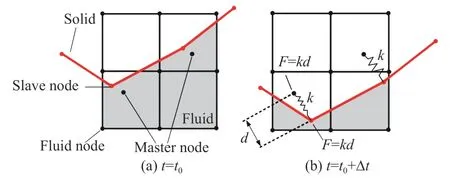
圖6 流固耦合算法Fig. 6 Algorithm of fluid-structure interaction
式中:k為基于主從節(jié)點(diǎn)質(zhì)量模型特性的剛度系數(shù)。
2.2 有限元模型
選定一個(gè)局部坐標(biāo)系(Oxyz)和一個(gè)全局坐標(biāo)系(O0x0y0z0)[20],如圖7 所示。其中,全局坐標(biāo)系原點(diǎn)O0處于航行體入水點(diǎn);O0x0軸位于水平面內(nèi),此軸的方向指向航行體的前進(jìn)方向,稱為參考航向;O0y0軸垂直于地面指向上方,稱為鉛垂軸;O0z0軸處于水平面內(nèi),垂直于x0O0y0平面,方向由右手坐標(biāo)法則確定。局部坐標(biāo)系原點(diǎn)O位于航行體重心處,Ox軸處于航行體對(duì)稱面內(nèi),與航行體幾何對(duì)稱軸一致,指向航行體頭部,稱為航行體縱軸;Oy軸位于航行體縱對(duì)稱面內(nèi),垂直于Ox軸,指向上方,稱為航行體立軸;Oz軸垂直于xOy平面,從航行體尾部觀察,Oz軸指向右方,稱為航行體橫軸。定義Ox軸與水平面的夾角為入水角θ。
圖7 坐標(biāo)系的定義Fig. 7 Definition of coordinate systems
考慮到航行體殼體以及罩殼在入水過(guò)程中的彈塑性變形,對(duì)它們采用*MAT_PLASTIC_KINEMATIC材料模型。航行體殼體材料選用鋁合金,該鋁合金的密度為2 700 kg/m3,彈性模量為75 GPa,泊松比為0.33,屈服應(yīng)力為275 MPa,剪切模量為1.33 GPa。罩殼材料選用不飽和聚酯樹脂復(fù)合材料,該材料的密度為1 160 kg/m3,彈性模量為3.5 GPa,泊松比為0.34,屈服應(yīng)力為101 MPa。對(duì)緩沖件采用*MAT_PLASITIC_KINEMATIC 材料模型,并設(shè)置失效應(yīng)變,用于模擬緩沖件的破碎過(guò)程。當(dāng)某個(gè)單元的應(yīng)變超過(guò)失效應(yīng)變時(shí),該單元即失效,不再參與計(jì)算。不同密度的發(fā)泡材料的緩沖性能不同[21],所采用緩沖件的材料為硬質(zhì)聚氨酯泡沫,該泡沫的密度為90 kg/m3,彈性模量為129 MPa,泊松比為0.024,失效應(yīng)變?yōu)?.5,阻尼系數(shù)為0.5。
對(duì)水和空氣等流體采用*MAT_NULL 材料模型,需要采用*EOS_GRüNEISEN 狀態(tài)方程[22]描述水的運(yùn)動(dòng):

式中:pw為水的壓力,c為水中聲速,γ0為Grüneisen 常數(shù),α 為γ0的一階體積修正量,ew為水的體積內(nèi)能;S1、S2、S3為斜率系數(shù),ψw為水的相對(duì)體積。本文中:c=1 480 m/s,S1=2.56,S2=-1.986,S3=0.226,S3=0.226;水的初始體積內(nèi)能ew0=0,水的初始相對(duì)體積ψw0=1。
采用*EOS_LINEAR_POLYNOMIAL 狀態(tài)方程[23]描述空氣的運(yùn)動(dòng):

式中:C1、C2、C3、C4、C5、C6為多項(xiàng)式系數(shù);ea為空氣的體積內(nèi)能; μa=1/ψa-1 ,ψa為空氣的相對(duì)體積。本文中:C0=C1=C2=C3=0,C4=C5=0.4,C6=0;空氣的初始體積內(nèi)能ea0=250 kJ/m3。
2.3 網(wǎng)格無(wú)關(guān)性驗(yàn)證
流體網(wǎng)格尺寸與結(jié)構(gòu)網(wǎng)格尺寸之比:

式中:LE為流體單元網(wǎng)格的特征尺寸;LL為結(jié)構(gòu)單元網(wǎng)格的特征尺寸。航行體的入水沖擊加速度用無(wú)量綱的系數(shù)cd表示:

式中:m為航行體的質(zhì)量,a為航行體的入水加速度,R為航行體的最大半徑,v為航行體的入水速度。
航行體網(wǎng)格尺寸為10 mm,N取值為1~5;水和空氣單元的網(wǎng)格尺寸一致,分別為10、20、30、40 和50 mm。航行體的入水速度為100 m/s,入水角度為90°。不同網(wǎng)格比例下的沖擊加速度系數(shù)時(shí)程曲線、加速度峰值系數(shù)cd,p如圖8 所示,可以看出,隨著流-固網(wǎng)格比例的減小,加速度峰值和脈寬逐漸增大,當(dāng)N=4 時(shí)計(jì)算結(jié)果就滿足了收斂性要求。綜合考慮了計(jì)算精度的要求及所需要的計(jì)算時(shí)間,航行體的網(wǎng)格尺寸設(shè)置為10 mm,水和空氣的網(wǎng)格尺寸均設(shè)置為40 mm,同時(shí),為減小壁面效應(yīng)對(duì)計(jì)算結(jié)果的影響,空氣域和水域的尺寸均設(shè)置為10 m×6.4 m×6 m,水域底部設(shè)置為固定邊界,其余邊界條件設(shè)置為無(wú)反射邊界條件,總體劃分網(wǎng)格數(shù)為8 763 225,如圖9 所示。
圖8 不同網(wǎng)格尺寸下的加速度系數(shù)及其峰值Fig. 8 Time history curves of acceleration coefficient and its peaks under different mesh sizes
圖9 計(jì)算域Fig. 9 Computational domain
2.4 數(shù)值計(jì)算結(jié)果驗(yàn)證
為了驗(yàn)證數(shù)值計(jì)算模型的正確性與準(zhǔn)確性,開展了航行體縮比模型頭段帶緩沖頭帽高速入水實(shí)驗(yàn)。實(shí)驗(yàn)現(xiàn)場(chǎng)布局如圖10 所示,采用高壓空氣作為模型的動(dòng)力來(lái)源;在模型內(nèi)部安裝測(cè)試裝置,記錄模型的加速度信息;利用高速攝像機(jī)捕捉模型的位置姿態(tài)及入水空泡演變信息;模型的入水速度為101 m/s,入水角度為60°。
圖10 實(shí)驗(yàn)現(xiàn)場(chǎng)布局Fig. 10 Experimental layout
利用圖像處理技術(shù),將數(shù)值計(jì)算的空泡演變宏觀輪廓進(jìn)行提取,并與實(shí)驗(yàn)中高速攝像機(jī)拍攝所得的航行體入水空泡輪廓進(jìn)行疊加對(duì)比,如圖11 所示。從兩者的空泡輪廓和演變規(guī)律來(lái)看,本文中所建立的裝備緩沖頭帽的航行體高速入水?dāng)?shù)值計(jì)算模型,能較真實(shí)地反映實(shí)際情況中航行體高速入水的空泡演變宏觀特性。
圖11 數(shù)值計(jì)算與實(shí)驗(yàn)空泡的對(duì)比Fig. 11 Comparison of cavities between simulation and experiment
圖12 為航行體的入水沖擊加速度數(shù)值計(jì)算結(jié)果和實(shí)驗(yàn)測(cè)試結(jié)果的對(duì)比。可以看出,數(shù)值計(jì)算和實(shí)驗(yàn)測(cè)得的加速度的變化趨勢(shì)基本一致,兩者軸向加速度峰值相對(duì)誤差為6.72%,徑向加速度峰值相對(duì)誤差為7.52%,兩者沖擊加速度峰值和峰值脈寬均吻合良好,滿足實(shí)際工程中數(shù)值計(jì)算的精度需求,能夠支撐后文的數(shù)值計(jì)算。
圖12 數(shù)值計(jì)算與實(shí)驗(yàn)測(cè)試加速度的對(duì)比Fig. 12 Comparison of accelerations between simulation and experiment
3 結(jié)果與分析
3.1 入水流場(chǎng)演化特性和頭帽破碎過(guò)程
圖13~14 為航行體以100 m/s 的速度垂直入水和以60°斜入水時(shí)的空泡演化圖像和緩沖材料破壞圖像,為了觀察緩沖材料的變形破碎,將罩殼隱藏。初始時(shí)刻時(shí),整體結(jié)構(gòu)位于水面上方一定的距離,5 ms 時(shí)緩沖頭帽已經(jīng)接觸到水面,水體被排開,空泡輪廓擴(kuò)張,緩沖頭帽破裂后刺破了空泡壁面,使空泡輪廓變得粗糙。航行體垂直入水時(shí),空泡輪廓基本對(duì)稱,水面上方液面隆起,有液體飛濺。當(dāng)航行體以60°斜入水時(shí),由于迎水面與背水面的速度不一致(見圖15),導(dǎo)致了兩側(cè)的水壓不同,壓力低的一面空泡擴(kuò)張速度快,壓力高的一面空泡擴(kuò)張速度慢。因此,航行體斜入水時(shí)產(chǎn)生的空泡是非對(duì)稱的,同時(shí),航行體除了受到一個(gè)較大的軸向載荷外,其徑向也將承受一個(gè)不可忽視的沖擊載荷。裝備緩沖頭帽的航行體斜入水時(shí),緩沖頭帽的破碎不對(duì)稱,相較于垂直入水時(shí),緩沖頭帽破碎的范圍更大,從圖13~14 可以看出,不管是垂直入水還是斜入水,緩沖頭帽都能發(fā)生較大程度的破損,并在入水后期與航行體完全脫離,從而不影響航行體后續(xù)的入水彈道。
圖13 航行體以100 m/s、90°入水時(shí)流場(chǎng)演化和緩沖件的破壞過(guò)程(隱藏罩殼)Fig. 13 Flow field evolution and failure process of buffer when the vehicle enters water at 100 m/s and 90° (hide the nose cap)

圖14 航行體以100 m/s、60°入水時(shí)流場(chǎng)演化和緩沖件的破壞過(guò)程(隱藏罩殼)Fig. 14 Flow field evolution and failure process of buffer when the vehicle enters water at 100 m/s and 60° (hide the nose cap)
圖15 航行體以100 m/s 的速度在不同入水角度下20 ms 時(shí)水體的速度矢量Fig. 15 Vectors of velocity of the water when the vehicle enters water at 100 m/s and different angles at 20 ms
3.2 緩沖材料的破壞特性
圖16~17 分別為航行體以100 m/s 的速度垂直入水和60°入水角斜入水過(guò)程中緩沖材料在不同時(shí)刻的等效應(yīng)力云圖。
圖16 航行體以100 m/s、90°入水角入水時(shí)緩沖材料的等效應(yīng)力分布Fig. 16 Distribution of effective stress of the buffer when the vehicle enters water at 100 m/s and 90°
圖17 航行體以100 m/s、60°入水角入水時(shí)緩沖材料的等效應(yīng)力分布Fig. 17 Distribution of effective stress of the buffer when the vehicle enters water at 100 m/s and 60°
可以明顯看出,在緩沖頭帽撞水時(shí),緩沖材料內(nèi)部出現(xiàn)了明顯的應(yīng)力集中現(xiàn)象;應(yīng)力首先出現(xiàn)在緩沖材料的前端,并以應(yīng)力波的形式向緩沖材料的后端傳播;在航行體垂直入水初期,應(yīng)力在緩沖材料內(nèi)部呈現(xiàn)較均勻的分層現(xiàn)象。而在航行體以60°斜入水時(shí),由于緩沖材料兩邊觸碰到水的時(shí)刻不同,下部先受到水的擠壓作用,先出現(xiàn)應(yīng)力集中現(xiàn)象,因而導(dǎo)致入水初期應(yīng)力在緩沖材料內(nèi)部分布不均勻。從圖中也可以看出,7 ms 左右緩沖材料被航行體擊穿,此時(shí)航行體頭部直接接觸到水,航行體受到的沖擊載荷到達(dá)峰值。
3.3 入水速度和入水角度對(duì)降載性能的影響
探究了不同入水速度和不同入水角度下緩沖頭帽的降載性能。當(dāng)入水角度為90°時(shí),入水速度分別為100、150、200、250 和300 m/s;當(dāng)入水速度為100 m/s 時(shí),入水角度分別為60°、70°和80°。
圖18(a)為裝備緩沖頭帽的航行體在不同入水速度下垂直入水時(shí)的加速度時(shí)程曲線,圖18(b)為未裝備緩沖頭帽的航行體在不同入水速度下垂直入水時(shí)的加速度時(shí)程曲線。從圖18 可以看出,隨著航行體入水速度的不斷升高,沖擊加速度的峰值不斷增大,脈寬不斷增大,緩沖材料被擊穿的時(shí)刻不斷提前,緩沖頭帽的緩沖性能減弱,入水速度為300 m/s 時(shí),航行體加速度峰值減小22.17%。
圖18 不同的航行體以不同入水速度垂直入水時(shí)的加速度時(shí)程曲線Fig. 18 Time-history curves of acceleration when different vehicles enter water vertically at different velocities
圖19~20 為航行體以100 m/s 的速度在不同入水角度下的加速度時(shí)程曲線。可以看出,在入水速度相同時(shí),隨著入水角的增大,軸向加速度峰值逐漸增大,徑向加速度峰值逐漸減小,緩沖頭帽對(duì)航行體軸向和徑向加速度峰值的減小率越大,當(dāng)入水角度為60°時(shí),對(duì)軸向加速度峰值的減小率為31.83%,對(duì)徑向加速度峰值的減小率為66.80%。
圖19 不同的航行體以100 m/s 的速度在不同入水角度下的軸向加速度時(shí)程曲線Fig. 19 Time-history curves of axial acceleration when different vehicles enter water at 100 m/s and different angles
圖20 不同的航行體以100 m/s 的速度在不同入水角度下的徑向加速度時(shí)程曲線Fig. 20 Time-history curves of radial acceleration when different vehicles enter water at 100 m/s and different angles
4 結(jié) 論
設(shè)計(jì)了適用于大尺度航行體高速安全入水的尖拱體外形開槽包裹式緩沖頭帽,并給出了詳細(xì)的設(shè)計(jì)參數(shù)。基于ALE 算法,對(duì)裝備開槽包裹式緩沖頭帽的航行體高速入水過(guò)程進(jìn)行了數(shù)值模擬,并用航行體頭段縮比模型高速入水實(shí)驗(yàn)驗(yàn)證了所建立數(shù)值模型的正確性與準(zhǔn)確性。從不同角度,對(duì)所設(shè)計(jì)的開槽包裹式緩沖頭帽緩沖性能進(jìn)行了分析,主要得到以下結(jié)論。
(1)裝備緩沖頭帽的航行體在高速垂直入水時(shí),受緩沖頭帽破碎形態(tài)的影響,產(chǎn)生了壁面較粗糙的對(duì)稱空泡;而斜入水時(shí),受兩側(cè)水流速度不一致的影響,產(chǎn)生了非對(duì)稱空泡,對(duì)航行體的受力分布產(chǎn)生了不可忽視的影響。
(2)航行體垂直入水時(shí),應(yīng)力集中區(qū)域首先在緩沖材料頭部出現(xiàn),并以應(yīng)力波的形式向后快速傳遞;垂直入水時(shí)應(yīng)力分布呈現(xiàn)較均勻的分層現(xiàn)象,斜入水時(shí)應(yīng)力分布也呈現(xiàn)分層現(xiàn)象,但不均勻;應(yīng)力區(qū)域的分布可為緩沖材料的結(jié)構(gòu)設(shè)計(jì)提供指導(dǎo)。
(3)隨著航行體入水速度的提高,沖擊加速度的峰值也隨之增大,緩沖頭帽被擊穿的時(shí)刻提前,降載性能逐漸下降,以300 m/s 的速度垂直入水時(shí),沖擊加速度峰值減小22.17%;當(dāng)航行體斜入水時(shí),入水角度越大,緩沖頭帽的降載效果越好,入水速度為100 m/s、入水角度為60°時(shí),軸向沖擊加速度峰值減小31.83%,徑向沖擊加速度峰值減小66.80%,緩沖頭帽的降載隔沖作用給航行體高速安全入水提供了保證。