基于最小二乘的FAST主動反射面板調節模型
2022-12-22 09:14:04蔡凈伶鄭麗娟杜佳佳
四川文理學院學報 2022年5期
關鍵詞:信號
李 駿,蔡凈伶,鄭麗娟,杜佳佳
(四川文理學院 數學學院,四川 達州 635000)
1 問題的提出
中國天眼—500 米口徑球面射電望遠鏡(簡稱FAST),為天體樣本觀測提供了便利. 它的建立大幅增加科學家觀測天體的樣本數目,提升天體觀測質量,為現代物理學的統計檢驗、天文學的理論和模型研究等提供了支持,推動我國的射電天文邁入新臺階. FAST 的主動反射面可分為兩個狀態:基準態和工作態. 基準態時反射面為一球面(基準球面);工作態時反射面的形狀被調節為一個近似旋轉拋物面(工作拋物面). 當FAST 觀測某個方向的天體目標S 時,饋源艙接收平面的中心被移動,調節基準球面上的部分反射面板形成一個近似旋轉拋物面,從而將來自目標天體的平行電磁波反射匯聚到饋源艙的有效區域. 在反射面板調節約束下,確定一個理想拋物面,然后通過調節促動器的徑向伸縮量,將反射面調節為工作拋物面,使得該工作拋物面盡量貼近理想拋物面,以獲得天體電磁波經反射面反射后的最佳接收效果.
問題:結合考慮反射面板調節因素,確定主動反射面板理想拋物面;建立反射面板調節模型,使反射面盡量貼近該理想拋物面,并將理想拋物面的頂點坐標,以及調節后反射面300 米口徑內的主索節點編號、位置坐標、各促動器的伸縮量等結果給出.并依據所給出的反射面調節方案,計算調節后饋源艙的接收比,并與基準反射球面的接收比作比較.[1]
2 模型假設及符號說明
模型假設:
(1) 不考慮下拉索張力;
(2) 工作狀態時整個反射面板的形狀為拋物面;
(3) 忽略圓孔對面板反射的影響;
(4) 電磁波信號及反射信號均為直線傳播;
(5) 反射面板的厚度忽略不計;
(6) 基準態式的反射面板是相同的等邊三角形,且質地均勻.

表1 符號說明
3 問題分析
根據觀測天體與基準球面球心以及饋源艙接收平面的中心與焦面交點的特殊位置關系以及賽題中給出的所有坐標的繪圖,構建空間幾何關系的拋物面方程的數學模型.[2]針對不同角度下的理想拋物面根據空間中的點關于原點旋轉的坐標變換關系矩陣,得到旋轉之后的理想拋物面的參數方程. 以節點伸縮量的變化坐標為變量,以伸縮量變化的限定條件建立單目標非線性優化模型,找出理想拋物面與調節后拋物面的偏差函數,建立優化模型求出最優伸縮量.[3-4]
考慮反射面板在主索網的三角網格中,反射面板為三角形. 任一反射面板的信號反射到饋源艙所在平面的形狀為三角形,探究其在饋源艙有效區域的占比情況,得到一個反射面板的饋源艙接收比. 根據問題中主索節點坐標為對應反射面板坐標,尋找三角板入射信號與出射信號平面. 通過確定出射信號的方程,尋找出射信號方程與饋源艙所在平面交點,得到出射信號在平面組成三角形的大小情況. 計算三角形與饋源艙有效區域的重合面積大小,得到一個反射面板對于饋源艙的信號反射比. 通過對300米口徑內所有反射面板的信號反射比進行相加,得到饋源艙的接收比.
4 模型建立與求解
4.1 主動反射面運動機理
FAST反射面單元在其三個主索節點上都有連接裝置,并與支承系統組建成一個反射面系統.FAST 主動反射面由基準狀態轉為工作狀態時,需要通過下拉索來實現變位,下拉索與促動器配合實現由球面變形為工作拋物面.我們設想,球體表面上有一節點O(處于照明區域),其下方一條下拉索沿球體直徑方向,現在需要通過調節該下拉索以使得該節點能夠到達工作拋物面的一點O'上,在理論的情況下,該節點應該到達我們所設想的點O'上,但在現實中,往往由于系統本身存在一定的測量誤差等因素的介入,使得變動后的節點與工作拋物面上點O'重合度產生偏差,移動到了O″,所以對理想拋物面的求解,即要偏差最小.
4.2 S 位于基準球面正上方時,反射面板的理想拋物面模型.
基準球面是FAST 的主要結構,依據賽題中所給的數據,通過MATLAB 繪圖,得到基準球面的三維圖(如圖1),其俯視圖(如圖2).

圖1 基準球面的三維圖
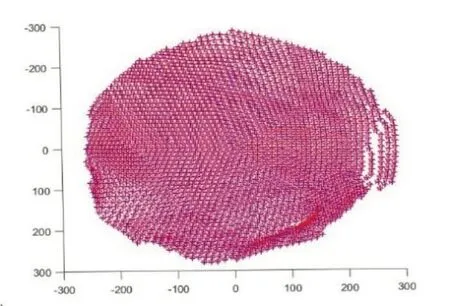
圖2 基準球面俯視圖
觀測天體S位于基準球面的正上方,即S位于基準球面球心C點的正上方,饋源艙接收平面的中心被移到直線SC與焦面的焦點P處,所以S、C、P位于同一直線上,調節基準球面上的部分反射面板形成SC對稱軸、以P 為焦點的近似旋轉拋物面,從而將來自目標天體的平行電磁波反射匯聚到饋源艙的有效區域.
所以以C為原點,以點C與點S的連線為z軸,逆時針方向建立x軸、y軸,構造空間直角坐標系. 取xCz平面畫出圖3進行分析研究.
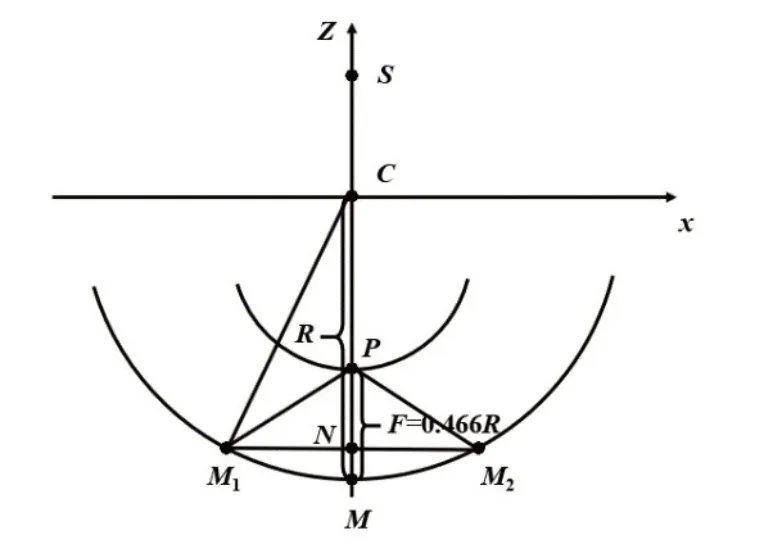
圖3 xCz平面上點的位置關系
設標準拋物線方程為:
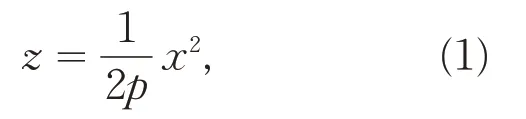
由于|CM|= R,|PM|= F,所以得到P點在xCz 平面的坐標為(0, R-F),即為理想拋物面的拋物線的實際焦點,所以理想拋物面是由標準拋物面向z軸負半軸平移得到.
焦點向下平移的距離為:

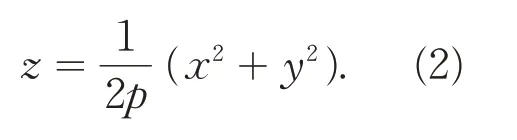
所以理想拋物面的方程模型為:

在圖3的Rt△CNM1中有,

由(5)式、(6)式可得:
而M1的坐標為(-|NM1|, -|PN |), M2的坐標為(|NM1|, -|PN |),將M1的坐標代入(4)式,可得:

將R=300m,F=0.466R 代入(8)式, 通過MATLAB 求解得出,p=279.668,所以理想拋物面的方程為:

4.3 S 偏角為α,β 時,反射面板的理想拋物面及反射面板調節模型
4.3.1 反射面板的理想拋物面模型
當觀測天體S位于方位角為α和仰角為β時,它的理想拋物面為觀測天體S位于基準球面的正上方時的理想拋物面繞原點旋轉得到,即理想拋物面上的點(x,y,z),分別繞x軸旋轉θ度,y軸旋轉γ度,z軸旋轉ω度. 由空間中點關于原點旋轉的坐標變換關系,可得該點繞原點旋轉后的點(x',y',z') 的坐標為:


由此可以得到旋轉之后的理想拋物面的參數方程為:

由于夾角α = 36.795°,β = 76.169°,即θ=可得:
此時的理想拋物面方程為:

其中u,v為參數.
4.3.2 反射面板調節模型
主索網反射面形狀的改變是通過下拉索與促動器的配合來完成的. 下拉索長度固定,通過調節促動器的徑向伸縮量來完成下拉索的調節,從而可使節點運動到理想拋物面上,已達到調節反射面板的位置的目的,最終形成其工作拋物面.
4.3.2.1 反射面板調節模型的機理分析
主動反射面工作時要求對饋源艙照明部分的主動反射面進行調整,當照明部分的網面調整為理想拋物面時,使得來自觀測天體S 的平行電波經反射面板反射后能被饋源艙接收的電波最多,因此建立反射面板的調節模型.
假設主動反射面板上的節點的初始位置為:

其中xi0(i= 1,2,3…)是節點i初始位置的坐標,要對主動非反射面進行調整,則需要對節點的位置進行調整,對應節點的位移為:

其中Δhi=[Δxi,Δyi,Δzi]T.由此可得調整之后的節點坐標為:

當天體S的位置變換時,根據求得的理想拋物面的模型可以得到拋物面上點的變換矩陣T.則相應的初始位置x0,節點調整的位移Δh和調整后節點的位置x為:

4.3.2.2 反射面板調節模型的目標函數
設某時刻饋源倉照明區域的節點個數為m,照明區域內節點的初始坐標,和調整位移為xq和Δhq,調整之后要使得饋源艙照明去取的節點盡量多的位于理想拋物面上. 取實際拋物面上的任一點(xi,yi,zi),對于任意在照明區域內的節點j的位置與理想拋物面的偏離程度:

所以有:

其中Δxdj,Δyjd,Δzdj表示節點j旋轉后的位移分量.[3,5]
由于主動反射面的初始位置幾乎就位于基本球面上,與理想拋物面的偏差很小,因此δj(xdj)中的二次項可以忽略不記,即:

當照明區域的節點都位于理想拋物面上時,任一節點j的偏離程度為零,得到目標函數,使各節點的偏離程度的平方和最小. 即求:

的最小值.
4.3.2.3 反射面板調節模型的約束條件
促動器的徑向伸縮范圍為-0.6米至0.6米,即:

主索點調節后,相鄰兩節點之間的距離會發生微小的變化,變化幅度不超過0.07%.
設計如下的求解變化幅度的算法步驟:
Step 1:求出基準球面上兩相鄰節點的距離li;
Step 2:求出實際拋物面上兩相鄰節點的距離,與基準球面的兩相鄰節點的距離的變化大小,即Δui;
Step 3:求出距離的變化幅度,即:

要求Δd≤0.07%.
于是得到關于實際拋物面貼近理想拋物面的優化模型:

對題目中的數據進行處理,根據附件可以繪制出節點的大致草圖,由此推出相鄰節點之間的編號規律. 節點的個數第一層5個、第二層10個、第三層15個、第四層20個……以每層5個點的增長規律遞增.
如圖4,由Ai為每層的起始點繞A0順時針方向旋轉一周得到A,B,C,D,E的順序.根 據這個規律導入附件三的主索節點1主若節點2、主索節點3,得到兩相鄰節點之間的距離,將其導入MATLAB 進行作圖(如圖5),由此得到兩相鄰節點距離的變化趨勢.[6]
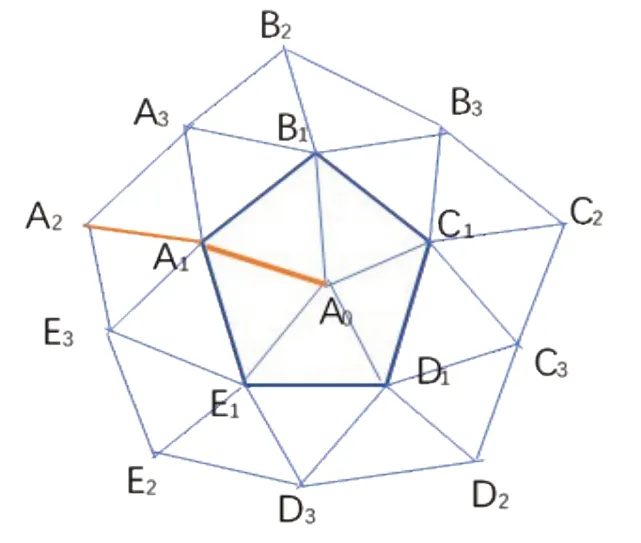
圖4 節點草圖
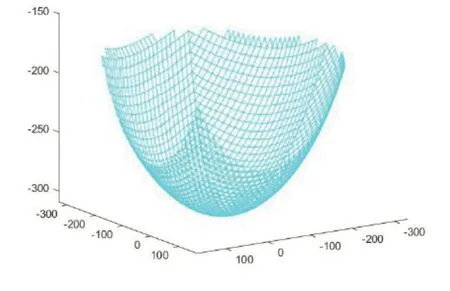
圖5 基準球面節點圖
4.4 饋源艙的接收比模型
根據單個反射面板呈三角形,目標天體的電磁波信號和反射信號沿直線傳播, 經反射面板反射的信號在饋源艙所在平面形成三角形范圍,計算三角形面板在饋源艙有效區域的重合面積,得到一個反射面板對于饋源艙的信號反射比.
將主索節點坐標作為對應的反射面板頂點坐標,反射面板作成三角形,利用反射面板的三個頂點確定其坐標. 建立以球心為原點的三維立體坐標系,以目標天體S 與基準球面c 的連線方向為z 軸,目標天體輻射的電磁波信號沿直線方向傳播,目標天體的入射的方向沿z軸負方向,其方向單位向量為=(0,0,1).
記第i 個反射面板的三個頂點分別P1i(u1i,u1i,u1i),P2i(u2i,u2i,u2i),P3i(u3i,u3i,u3i) 得到反射面相鄰的向量分別為和則反射面板的法向量為:

設反射面板上反射點的位置為(xi,yi,zi),反射信號的方向向量為,入射角為α 反射角為θ, 根據電磁波的反射定律,反射信號所在直線分別在法線兩側,入射角α 與反射角θ 相同,得到角度關系式為:

用向量表28示,即:
整理得到反射信號方程:


根據平面的點法式方程,得到平面方程為:

故出射信號方程為:

設饋源艙所在平面方程為z= -(R-F),R 為基準球面半徑,F 為饋源艙接收平面所在的焦面半徑與基準球面半徑的半徑差.出射信號與饋源艙所在平面的交點可由下面方程組決定,即:

已知反射面板為三角形, 目標天體的入射信號經反射面板反射后, 反射信號在饋源艙所在平面形成三角形范圍. 記三角形的頂點坐標分別為Q1i(x1i,y1i,z1i),Q2i(x2i,y2i,z2i),Q3i(x3i,y3i,z3i),利用饋源艙所在平面方程z= -(R-F)將三角形轉化為二維平面進行研究,則頂點坐標分別為Q1i(x1i,y1i),Q2i(x2i,y2i),Q3i(x3i,y3i)在二維平面內,根據三角形面積公式:

可計算三角形Q1iQ2iQ3i的面積.
設三角形面積與饋源艙接收信號的有效區域重合的面積為ΔSi,即為饋源艙有效區域接收到的反射信號所占面積.設饋源艙的信號接收比為ψ,饋源艙信號接收區域接收到的所有信號面積和∑ΔSi,與300 米口徑內所有反射面板反射信號的面積和∑Si的比值為:
以目標天體S 與基準球面的球心C 的連線方向為z 軸建立以球心為原點的三維立體坐標系,根據觀測天體S位于α= 36.795°,β= 78.169°時的理想拋物面方程和基準球面方程,分別計算基準態和工作態下300米口徑內反射面所有反射面板的法向量. 展示工作態部分法向量結果,如表2所示.

表2 反射面板的主索節點編號
(1) 判斷饋源艙接收信號的有效區域是否在三角形內.
設反射面板在饋源艙所在平面內反射信號形成的三角形為ΔABC,計算三邊向量分別為饋源艙接受信號的有效區域為圓,設圓上點為P,分別將P 與三角形三點A、B、C 連接,可得向量,作向量、向量的向量積,若兩個向量積的方向一致,則P與C在同一側.
利用同樣的方法,分別判斷P與A、P與是否B 在同一側.若P 點與A、B、C 三點均同側,則可以判定P在三角形區域內.
(2) 比較饋源艙的接收比.
當反射面為工作拋物面時,饋源艙接收區域接收的所有信號面積和∑ΔSi=763.41m2,300 米口徑內所有反射面板反射信號的面積和∑Si=46663.2m2,饋源艙信號的接收比為ψ拋物面=1.636% .
當反射面為基準拋物面時,饋源艙接收區域接收的所有信號面積和∑ΔSi= 600.55m2, 300米口徑內所有反射面板反射信號的面積和∑Si=47890.7m2,饋源艙信號的接收比為ψ拋物面=1.2654%. 比較得,饋源艙的信號接收率提高了22.65%.
5 結果檢驗與誤差分析
由檢驗數據可知,實際拋物面與理想拋物面間的差距較小,但仍然存在些微偏差,分析產生誤差的原因有以下幾點:
(1) FAST 射電望遠鏡對周圍的電磁環境要求較高,周邊存在其他電磁的干擾;
(2) 人工測量數據存在一定誤差;
(3) 在本問題中只考慮了徑向收縮對反射三角面的影響,實際問題中還有下拉索張力對反射三角面的影響;
(4) 模型中設想的拋物面均為光滑的曲面,對所建立的模型造成一定的誤差.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
