RRT算法路徑優(yōu)化及仿真驗證
2022-12-25 12:21:28劉文光劉浩偉王志民
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2022年11期
關(guān)鍵詞:優(yōu)化
劉文光,劉浩偉,羅 通,王志民
(江蘇大學(xué) 汽車與交通工程學(xué)院, 江蘇 鎮(zhèn)江 212013)
0 引言
無人駕駛技術(shù)中,路徑規(guī)劃是重點和難點。為保證無人車的安全行駛,必須解決無人車在行駛過程中的避障問題。無人車避障路徑的優(yōu)劣將直接影響車輛的安全性和實效性。常見的路徑規(guī)劃算法有遺傳算法、A*算法、RRT算法、人工勢場法、蟻群算法等[1-5]。其中,RRT算法因為不需要對環(huán)境進行精準(zhǔn)的建模,所以在算法布置和計算效率上具有優(yōu)勢。
RRT算法的核心是基于采樣擴展隨機生長樹節(jié)點,生成一條無碰的路徑。其主要存在的問題是搜索路徑質(zhì)量不高且非最優(yōu)、搜索代價過大、收斂慢等。針對搜索代價大、效率不高的問題,李金良等[6]提出安全場的概念,并結(jié)合實車數(shù)據(jù)基于安全距離建立安全場,對RRT算法進行改進,提高了搜索的效率和成功率,但其算法運行過于依賴數(shù)據(jù),魯棒性不夠。王海芳等[7]提出同時創(chuàng)建2顆搜索樹,交替進行相向搜索,同時以一定的概率對隨機點進行偏置,以提高收斂效率,并且對父節(jié)點進行重選,增強算法對環(huán)境的敏感程度,不過同時也增加了計算量。針對路徑非最優(yōu)及搜索質(zhì)量不高的問題,葉鴻達[8]提出了一種基于A*引導(dǎo)的RRT算法,其可以更好地引導(dǎo)隨機樹探索路徑。Karaman團隊[9]提出了漸進最優(yōu)RRT算法,基于最優(yōu)標(biāo)準(zhǔn)來調(diào)整生成的隨機節(jié)點,以提高采樣效率,但會花費更多的代價在碰撞檢測和重新布線上。Zhou等[10]采用最近鄰搜索策略,提高了收斂速度。Zhou[11]結(jié)合APF算法對RRT進行優(yōu)化,加入引力和斥力的作用。而Zhen團隊[12]則對RRT算法的采樣步長進行基于目標(biāo)吸引力的調(diào)整,提高搜索效率。
基于RRT算法當(dāng)前存在的問題和研究現(xiàn)狀,提出了一種優(yōu)化的RRT算法,對父節(jié)點進行約束范圍內(nèi)的重選,并對隨機樹進行剪枝,提高搜索效率。同時對生成的路徑進行平滑處理,使其滿足動力學(xué)約束。
1 RRT算法簡介
RRT算法是一種基于隨機采樣且能在多維空間中有效規(guī)劃路徑的算法。該算法以一個初始點作為根節(jié)點,再通過隨機采樣的方式增加樹枝節(jié)點,進而生成一個隨機樹,當(dāng)隨機樹中的樹枝節(jié)點生長到了一定數(shù)目且包括了目標(biāo)點,便可以在隨機樹樹枝中找到一條由從初始點到目標(biāo)點的路徑[1]。
RRT算法的執(zhí)行過程如下:
1) 首先根據(jù)起始點,產(chǎn)生一個隨機點Xrand。
2) 產(chǎn)生隨機點后,計算隨機樹中的每一個節(jié)點與新生成的隨機點之間的距離,找出距離此隨機點最近的節(jié)點,記為Xnear。
3) 定義一個路徑長度d,在Xnear與Xrand連線上以Xnear為原點、長度為d處確定新的節(jié)點Xnew。
4) 判斷Xnew是否滿足設(shè)定需求,如果不滿足,舍棄,重新產(chǎn)生新的隨機點Xnew。
5) 循環(huán)產(chǎn)生路徑,直到Xnew與目標(biāo)點的距離小于d,也就是新生成的節(jié)點到達目標(biāo)點附近時,則退出循環(huán),生成路徑。
由于RRT算法采樣具有隨機性的特點,所以最終生成的路徑往往不是最優(yōu)路徑,故需要對RRT算法進行優(yōu)化使其能更好地用于實際路徑搜尋規(guī)劃中[2]。
2 避障策略
為了簡化問題,路徑規(guī)劃的障礙物選取較為規(guī)則的幾何形,如圓、多邊形等。對于圓形障礙物來說,其邊界的判斷屬于非線性問題,通常將圓形進行線性化處理(轉(zhuǎn)化為多邊形),只需要判斷Xnew的橫縱坐標(biāo)是否在圓內(nèi)。這里規(guī)定,當(dāng)Xnew位于圓形障礙物的外接正方形內(nèi),就視為碰撞。如果圓形障礙物的圓心坐標(biāo)為(X0,Y0),半徑為r,則需要考慮移動機器人的尺寸,對障礙物進行膨化處理,膨脹尺寸為inf,所以碰撞條件為:
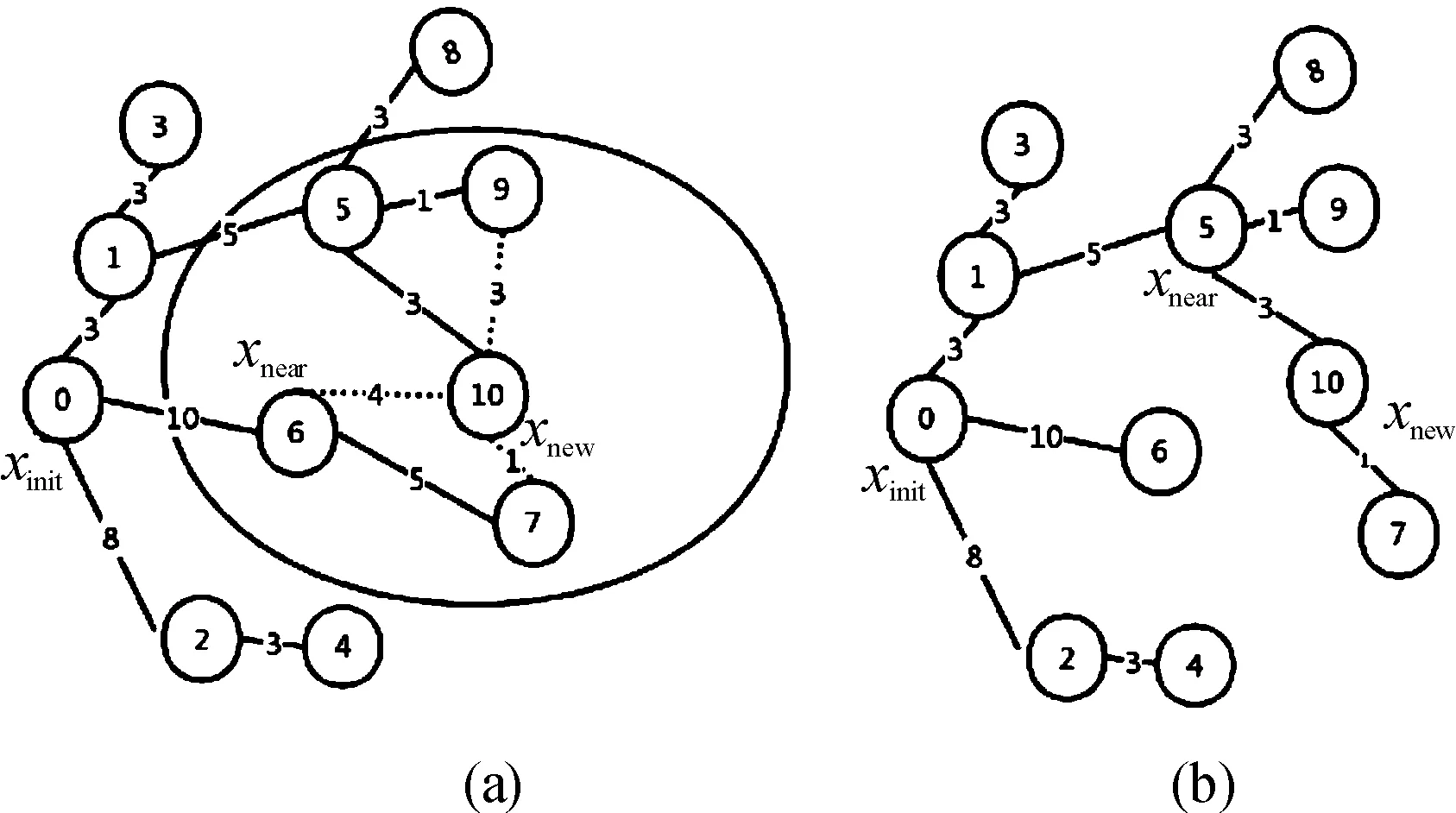
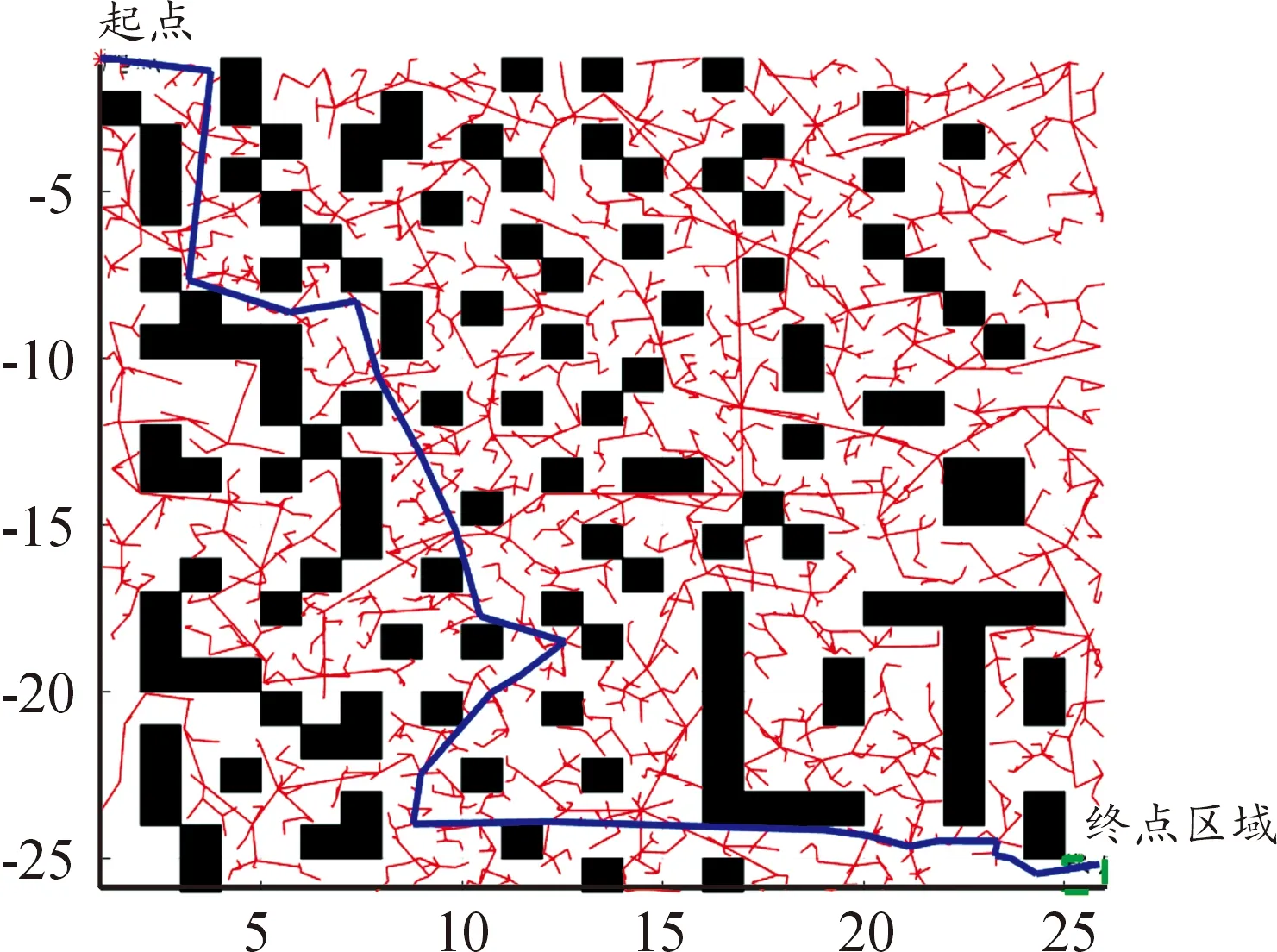
X0-r-inf Y0-r-inf (1) 因為圓形障礙物的避障策略相對簡單,在仿真中并未設(shè)置圓形障礙物。在仿真環(huán)境中搭建的隨機環(huán)境,主要選取長方形障礙物。長方形的碰撞機制研究相對復(fù)雜一些,具體碰撞機制如下︰在擴展隨機樹的過程中,由Xnear到Xnew連接的邊不能與長方形障礙物的任何一邊相交,即將長方形障礙物碰撞檢測問題轉(zhuǎn)化為直線與矩形相交問題。直線與矩形相交的判斷主要分為兩步: 第一步,判斷Xnew與Xnear是否在矩形某一條邊的一側(cè)。如果Xnew與Xnear在矩形任意一條邊的同側(cè),則不用進行后續(xù)判斷,Xnew與Xnear連線必定不與矩形相交。這里不存在兩點位于矩形內(nèi)部的情況,因為Xnew由Xnear產(chǎn)生,而Xnear必位于矩形外側(cè),如果Xnew與Xnear位于某—條邊的兩側(cè),則進行第二步判斷[3]。 第二步,當(dāng)Xnew與Xnear在矩形任意一邊的不同側(cè)時,分為2種情況:第一種情況是Xnew位于矩形內(nèi)部,則Xnew與Xnear連線必定與矩形相交。第二種情況是兩點均在矩形外部。在這種情況下并不能保證兩點連線不與矩形相交,兩點位于矩形外側(cè)且位于矩形上邊的兩側(cè),但兩點連線與矩形相交。在這種情況下,利用直線與矩形的性質(zhì)進行避碰計算。 盡管RRT算法相對于其他算法比較高效,可以較好地解決障礙物復(fù)雜場景路徑的規(guī)劃問題,具有很多優(yōu)勢,但是由于RRT算法取點的隨機性,并不能保證所得出的路徑最佳,所以須對RRT算法進行優(yōu)化以便更好地解決路徑優(yōu)化的問題[4]。現(xiàn)根據(jù)RRT算法在路徑規(guī)劃過程中,路徑非最優(yōu),提出這樣2個優(yōu)化策略:約束范圍內(nèi)重選父節(jié)點,基于重選的父節(jié)點修剪隨機樹樹枝。 在最新生成的節(jié)點Xnew附近以一定半徑范圍作為約束搜尋相鄰的節(jié)點,使之作為替代Xnew父節(jié)點的候選節(jié)點。 計算約束范圍內(nèi)的附近節(jié)點到起點的路徑距離和Xnew到每個附近節(jié)點的總路徑距離,具體過程見圖1。圖1(a)中表達的是擴展隨機樹過程中的某一時刻,節(jié)點的數(shù)字表示本節(jié)點產(chǎn)生的順序,0是起點,10是最新產(chǎn)生的節(jié)點Xnew,節(jié)點6是節(jié)點10這一時刻的父節(jié)點Xnear,節(jié)點間連線上的數(shù)字表示兩節(jié)點間的距離。 圖1 重選父節(jié)點過程示意圖 在為節(jié)點10重新選擇父節(jié)點過程中,以節(jié)點10為中心,以某一半徑作為約束,對范圍內(nèi)的節(jié)點10的相鄰節(jié)點作為父節(jié)點的候選點,也就是點5、7、9。計算其路徑代價如表1所示。 由表1可知,候選點5作為節(jié)點10新的父節(jié)點的總路徑距離是最小的,所以把節(jié)點10的父節(jié)點改成6,重新生成的路徑隨機樹如圖1(b)所示。 表1 候選點路徑代價 在重新選擇父節(jié)點的基礎(chǔ)上,通過修剪隨機樹來調(diào)整隨機樹樹杈的數(shù)目,減少不必要的樹枝生成,進而縮短路徑距離。 修剪邏輯為:如果新生成的Xnew可以作為相鄰節(jié)點的父節(jié)點,并且縮短路徑距離,則進行修改,過程示意圖如圖2所示。 圖2 修剪隨機樹過程示意圖 如圖2(a)所示,節(jié)點10為新生成的節(jié)點Xnew,相鄰的節(jié)點為6、7、9,如果用新生成的節(jié)點10代替他們各自的父節(jié)點0、5、6,則路徑代價如表2所示。 表2 修剪后的路徑代價 如果節(jié)點10作為原節(jié)點6的父節(jié)點,原路徑由0-6變成0-1-5-10-6,代價大于原路徑,舍棄本方案;同理候選點9結(jié)果也是如此。 如果節(jié)點10作為節(jié)點7的父節(jié)點,原路徑由0-6-7變成0-1-5-10-7,代價相比較于原路徑較少,則使用本方案。 修剪隨機樹的意義在于通過新生成的節(jié)點來替換老節(jié)點的父節(jié)點,修改隨機樹的樹枝,去掉多余的樹枝路徑,縮短路徑距離。 如圖2(b)所示,重新選擇父節(jié)點使新生成節(jié)點連成通路后的距離縮短,修剪隨機樹則使新生成節(jié)點后的樹枝精簡,減少路徑長度代價,但新路徑的建立必須要保證新節(jié)點和父節(jié)點相連通且不觸及障礙物的條件下,重新選擇父節(jié)點和修剪隨機樹2個方法各司其職,相互配合,能夠進一步縮短路徑距離和搜索代價。 由于RRT算法是基于隨機采樣的,導(dǎo)致算法搜索到的路徑比較曲折、不平滑,路徑還包含了許多非必要的節(jié)點,特別是在復(fù)雜的多障礙物環(huán)境下,曲折點更多,由于汽車轉(zhuǎn)彎半徑有限,不利于汽車的行駛,故現(xiàn)提出2個路徑處理方法。 如圖3(a)所示,在生成的路徑中,節(jié)點3處的夾角小于汽車的最小轉(zhuǎn)彎半徑所要求的最小路徑夾角,因此,在路徑規(guī)劃結(jié)束后再對路徑進行檢查修剪,在路徑夾角不符合要求時進行修剪。如圖3(b)所示,由于原節(jié)點3處的夾角過小,不符合要求,所以在節(jié)點3的附近插入一個新的節(jié)點4,使其滿足轉(zhuǎn)彎條件。 圖3 最小轉(zhuǎn)彎半徑約束示意圖 在算法規(guī)避障礙物生成路徑的過程中,可能會出現(xiàn)如圖4(a)所示的情況,由于RRT算法的隨機性,生成的路徑雖然避開了障礙物,但是比較曲折,存在多余的路徑。現(xiàn)根據(jù)三角形兩邊和大于第三邊的原則[13],對路徑進行修改。 圖4 三角形原則修剪過程示意圖 在圖4(b)中,點1、2、3構(gòu)成三角形,現(xiàn)把路徑1-2、2-3消除,生成1-3路徑,進而縮短路徑距離,但是也必須保證新生成的1-3路徑與障礙物存在一定距離。點3、4、5構(gòu)成的三角形也進行相同的處理,生成3-5新路徑。路徑最終由1-2-3-4-5變?yōu)?-3-5,在縮短了路徑的同時,還一定程度上使生成的路徑更加平滑。 為驗證改進RRT算法相比于經(jīng)典RRT算法的改進效果,現(xiàn)將其布置到同一張地圖上進行仿真實驗,觀察其優(yōu)化效果。同時,為了與其他優(yōu)化算法做對比,這里選取A*引導(dǎo)RRT算法[2]參與仿真實驗,進行橫向?qū)Ρ取?/p> 現(xiàn)將改進的RRT和A*引導(dǎo)RRT算法及經(jīng)典RRT算法分別在Matlab生成的隨機地圖上進行重復(fù)仿真實驗50次,分析其生成途徑的總長平均值,用來評判改進后的RRT算法和A*引導(dǎo)RRT算法各自相對經(jīng)典RRT算法的優(yōu)化程度如何,同時記錄平均迭代時間,評判算法迭代效率如何。 為了驗證改進后的RRT算法優(yōu)化效果的魯棒性和普適性,分別在3幅不同的隨機地圖上進行仿真實驗,其效果如圖5—13所示。 圖5 Map1(基于RRT生成的路徑) 圖6 Map1(基于A*引導(dǎo)RRT生成的路徑) 圖7 Map1(基于改進RRT生成的路徑) 圖9 Map2(基于A*引導(dǎo)RRT生成的路徑) 圖10 Map2(基于改進RRT生成的路徑) 圖11 Map3(基于RRT生成的路徑) 圖12 Map3(基于A*引導(dǎo)RRT生成的路徑) 在3幅地圖,9個實驗組中,均設(shè)置起點為(0,0),終點為[(25,-25),(26,-25),(26,-26),(26,-25)]包圍的區(qū)域內(nèi),每個實驗組共進行50次實驗,得出的數(shù)據(jù)如表3所示。 表3 Map1仿真結(jié)果 表4 Map2仿真結(jié)果 表5 Map3仿真結(jié)果 由3組仿真實驗可以看出,A*引導(dǎo)RRT算法及改進的RRT算法(本算法)相較于原RRT算法在路徑長度上均有不錯的優(yōu)化效果,在不同地圖特征下優(yōu)化度略有差異,不過總體優(yōu)化度接近,但改進的RRT算法通過對約束下的父節(jié)點重選和對隨機樹剪枝的過程,大大提高了迭代收斂的效率。可以看到,在3組實驗中,改進的RRT算法迭代時長均比A*引導(dǎo)RRT算法短,可見,本算法在提高路徑優(yōu)化度的同時還保持了較高的搜索效率。圖7、圖10、圖13均是改進后的RRT算法生成的路徑圖。從圖中可以看出,相較于原RRT算法生成的圖5、圖8、圖11路徑圖來說,改進后RRT算法生成的隨機樹具有更好的發(fā)散性,而原RRT算法生成的隨機樹則比較曲折凌亂。故此,在最后生成的路徑中可以比較得出,優(yōu)化算法生成的路徑較為平緩,更符合車輛動力學(xué)規(guī)律,保障汽車能平緩行駛。 圖13 Map3(基于改進RRT生成的路徑) RRT算法在經(jīng)過約束后對父節(jié)點進行重選,使生成的隨機樹樹枝更加簡潔,指向性也更加明確,使找到目標(biāo)點后生成的路徑距離縮短,但由于重新選擇父節(jié)點可能會導(dǎo)致生成的路徑更加曲折,所以還需要對路徑進行進一步的優(yōu)化,即對隨機樹進行剪枝,通過修剪隨機樹修剪多余的隨機樹樹枝,減少冗余通路,能有效地減少路徑的長度。這兩步主要的功能是對規(guī)劃的路徑距離進行縮減,而后續(xù)的基于對最小轉(zhuǎn)彎半徑約束的路徑優(yōu)化和基于三角形原則的路徑優(yōu)化,則是對生成的路徑進行優(yōu)化,使路徑更加平滑,使生成的路徑更貼合實際汽車的行駛要求并滿足動力學(xué)約束。3 RRT算法優(yōu)化
3.1 重新選擇父節(jié)點


3.2 修剪隨機樹

4 路徑處理
4.1 基于最小轉(zhuǎn)彎半徑約束的路徑修改

4.2 基于三角形原則的路徑修改

5 Matlab仿真實驗










6 結(jié)論
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14能源工程(2022年1期)2022-03-29 01:06:28建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59消費導(dǎo)刊(2018年8期)2018-05-25 13:20:08家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41電子制作(2017年20期)2017-04-26 06:57:45
