參數在線調整的ARBF-NN車速預測方法研究
2022-12-25 12:21:34史立峰姜文龍
重慶理工大學學報(自然科學) 2022年11期
關鍵詞:模型
史立峰,馬 彬,2,3,郭 興,姜文龍
(1.北京信息科技大學 機電學院, 北京 100192; 2.新能源汽車北京實驗室, 北京 100192; 3.北京電動車輛協同創新中心, 北京 100192; 4.中國人民公安大學 交通管理學院, 北京 100038)
0 引言
近年來,電動汽車因其節能環保的優勢得到了快速發展,開發整車能量管理策略能夠顯著提高電動汽車能量利用效率。高精度車速預測是電動汽車能量管理控制策略的關鍵,是影響能量管理效果的重要因素[1]。因此,開發高精度車速預測方法對提高車輛能量管理效率具有重要意義。
目前,常用的車速預測方法可以區分為基于模型驅動的方法和基于數據驅動的方法[2]。其中,基于模型的車速預測方法依托于車輛與環境的相互關系建立模型,需要精確的地圖信息以及昂貴的采集設備[3]。基于數據的車速預測方法利用歷史車速數據或標準工況訓練模型進行預測[4],主要方法包括卡爾曼濾波法[5]、統計回歸法[6]和神經網絡算法[7]等。其中,神經網絡算法由于其強大的非線性映射能力、魯棒性和容錯率,成為當前研究的熱點[8]。當前,神經網絡算法主要分為反饋型神經網絡和前向型神經網絡。在反饋型神經網絡研究方面,解少博等[7]通過對比BP神經網絡與線性回歸、多項式回歸預測方法,指出BP神經網絡算法具有更高的預測精度;Ma等分別利用長短期記憶神經網絡算法(LSTM-NN)和卷積神經網絡算法(CNN)[9]實現了全路段交通速度預測。然而,反饋型神經網絡需要通過大量具有代表性的樣本數據對模型進行離線訓練,在線的自適應性具有一定的局限性。相比之下,前向型神經網絡具有收斂速度快、所需樣本量少以及優良的在線模型訓練能力。其中,RBF-NN作為典型的前向型神經網絡,在車速預測方面表現出強大的優越性,并且預測結果更符合車輛行駛特性[10]。但是RBF-NN的輸入層神經元數目、基函數標準差等結構參數是影響預測精度的關鍵參數[11-13],當前依賴于經驗的取值在全工況范圍內難以獲得滿意的效果。因此,在線調節RBF-NN車速預測模型結構參數對于實現更精確的車速預測具有重要意義。
當前,赤池信息準則(AIC)和貝葉斯準則(BIC)能夠作為模型參數調整準則,實現模型復雜度與預測準確性的平衡。在小樣本情況下,通過AIC會選擇高階模型以提高預測精度;在多樣本情況下,采用BIC可以防止因高精度而造成的模型復雜度過高[14]。根據此性質,本文選擇AIC作為依據進行RBF-NN在線參數調整,進而提高車速預測精度。
基于上述分析,首先搭建車速采集系統進行實際工況車速數據采集,利用滑動時間窗口方法對采集車速數據進行樣本化處理,建立預測模型訓練樣本庫;其次,分析輸入層神經元數目和基函數標準差對固定結構RBF-NN車速預測精度影響,進而結合AIC對RBF-NN結構參數進行在線調整。最后,提出了基于參數在線調整ARBF-NN的車速在線預測方法,提高了車速預測精度。同時,基于自然駕駛數據和標準測試工況,在Matlab仿真環境下驗證了算法的有效性。
1 基于滑動時間窗口的車速樣本化處理
1.1 自然駕駛數據采集
搭建圖1所示自然駕駛數據采集實驗系統對北京三環和四環城市道路的車速數據進行收集。系統包括IMU(車輛動態參數測量)、GNSS(導航車速等)和工控機。以1 s作為采樣時間,收集的部分車速數據如圖2(a)所示。為確保算法驗證數據為包含低速、中速和高速的全工況城市道路車速數據,對三環自然駕駛數據中部分數據進行處理,以原數據作為中速工況,將原數據縮小60%倍作為低速工況,放大1.6倍作為高速工況,構建如圖2(b)所示全工況車速數據,具體數據如表1所列。

圖1 實驗系統示意圖

圖2 實際車速軌跡

表1 不同工況車速信息
1.2 基于滑動時間窗口的車速樣本化處理
滑動時間窗口是在每時刻對窗口內的所有數據進行處理,常用于數據量隨時間增加而不斷增大且數據時效性隨時間衰減的應用場景。因此,選取滑動時間窗口方法進行歷史車速數據處理(如圖3所示)。

圖3 滑動時間窗口樣本構造
隨著窗口的推移,產生h×1維輸入向量,添加至訓練模型輸入矩陣之后;同理產生新的p×1維輸出向量添加在舊的訓練模型輸出矩陣,測試模型始終是包含最新信息的h×1維輸入向量。
假設在預測初始階段沒有預先儲存車速數據,隨著時間的推移逐漸形成歷史車速數據庫,用于RBF-NN的在線訓練。時間長度為tn的歷史車速數據庫表示為:
V=(v(t1),v(t2),…,v(tn-1),v(tn))
(1)
式中:v(tn)表示第tn時刻的車速數據。
考慮歷史hs車速數據對未來ps車速進行預測,則在ti時刻,訓練模型的輸入樣本所屬時間序列段為:
th=[ti-p-h+2,ti-p-h+2,…,ti-p]
(2)
訓練模型輸出樣本所屬時間序列段為
tp=[ti-p+1,ti-p+2,…,ti]
(3)
測試樣本所屬時間序列段為
(4)
經過滑動時間窗口的推移,在ti時刻,訓練模型的輸入樣本和輸出樣本分別為:
(5)
(6)
測試模型的輸入向量為:
Xtest=[v(ti-h+1),v(ti-h+2),…,v(ti)]T
(7)
2 具有參數在線調整功能的ARBF-NN車速預測方法
2.1 RBF-NN預測模型
RBF-NN算法是一種由輸入層、隱藏層和輸出層3層網絡結構構成的前向型神經網絡算法[15]。選取徑向基函數作為模型的隱藏層,其網絡結構如圖4所示[16]。
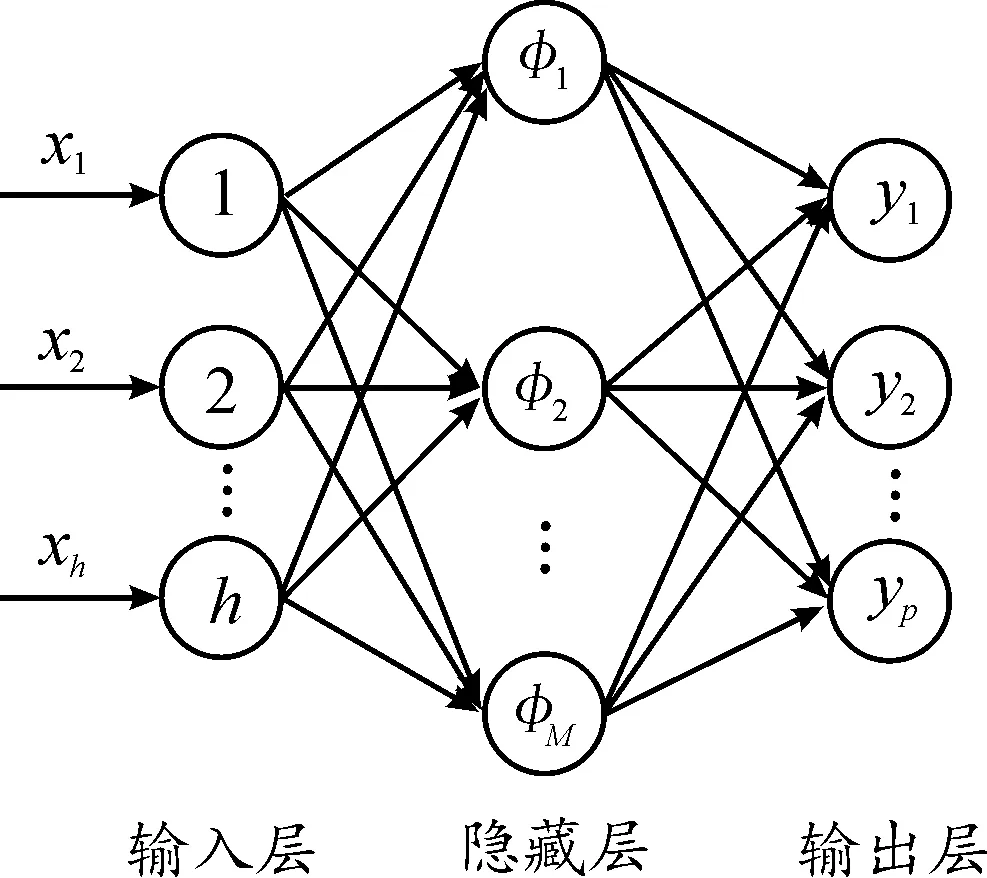
圖4 RBF-NN網絡結構
RBF-NN的輸出表達式為
(8)
式中:yk表示第k個輸出層神經元的輸出,即第k秒的預測車速;M表示隱藏層神經元數;ωjk表示第j個隱藏層神經元與第k個輸出層神經元間的連接權值;φj表示第j個隱藏層神經元的輸出,表達式為:
(9)
輸入層神經元數目和基函數標準差,是影響RBF-NN預測精度的關鍵因素[17]。常用的計算基函數標準差的方式為
(10)
式中,dmax表示任意一對選定基函數中心的最大距離。
隱藏層與輸出層之間的連接權值通過隱藏層輸出矩陣與期望輸出矩陣計算得到,表達式為
W=G+D
(11)
式中:W為連接權值矩陣;G為隱藏層輸出矩陣;G+表示矩陣G的偽逆;D為期望輸出矩陣。
2.2 RBF-NN結構參數對預測精度的影響
為說明預測的準確性,采用均方根誤差(RMSE)作為評估指標來反映單步預測偏差,使用平均均方根誤差(ARMSE)反映模型的整體預測性能。表達式為
(12)
(13)

在車速預測研究中,考慮歷史10 s的車速軌跡對未來5 s時域進行預測應用最為廣泛[18],因此,本文以5 s預測時域作為研究案例,即RBF-NN輸出層神經元數目設置為5。為保證充分考慮歷史車速軌跡的影響,輸入層神經元數目(order)范圍設置為3~13;此外,為保證基函數標準差(width)范圍合理性且包含常用方式計算數值在內,本文設置基函數標準差范圍為3~30。
輸入層神經元數目和基函數標準差對預測精度的影響如圖5所示,對單步車速預測結果的影響如圖6所示。結果表明:輸入層神經元數目和基函數標準差對預測結果有顯著影響。輸入層神經元數目過多會導致過擬合現象,過少會導致訓練樣本包含信息缺失。相同神經元數目下,隨著基函數標準差的增大,ARMSE減小且趨于穩定,持續增大基函數標準差可能會導致高斯徑向基函數過于平坦。

圖5 不同輸入層神經元數目和基函數標準差車速預測結果

圖6 不同輸入層神經元數目和基函數標準差單步車速預測結果
由圖6結果可知,固定的輸入層神經元數目和基函數標準差難以保證在整個過程中每一單步預測有最小均方根誤差,無法實現整個過程的高精度預測。因此,需要合理選擇對RBF-NN預測精度影響顯著的輸入層神經元數目和基函數標準差,提高模型在全工況下車速預測精度。
2.3 基于AIC準則的ARBF-NN在線參數調整
AIC作為衡量神經網絡模型擬合優良性的一種標準,能夠衡量所估計模型的復雜程度和模型數據擬合能力。因此,運用AIC準則來在線權衡RBF-NN模型的復雜度和車速預測結果的準確性。研究表明,AIC越小則表明預測模型越簡單且預測結果越精確。因此,根據AIC結果進行RBF-NN參數在線調整。AIC表達式為:
(14)

預測過程中,計算每一單步預測的AIC值后,以最小AIC準則選取所對應的輸入層神經元數目和基函數標準差,確定ARBF-NN結構參數。依據RBF-NN基本原理,本文設計了基于參數在線調整的ARBF-NN車速預測方法,預測方法整體流程如下所示。
Algorithm1基于參數在線調整的ARBF-NN 車速預測流程偽代碼
Input:x:車速序列;p:初始輸入層神經元數目,范圍為[3,13];h:初始基函數標準差,范圍為[3,30];M:基函數中心數目,定義為18;ti:當前時刻;tn: 車速序列長度;
Output:未來5 s 的預測車速;
1: setp=3,h=3,ti=h+p;
2: whileti<=tndo
3: forp=3;p<13;p++ do
4: forh=3;h<30;h++ do
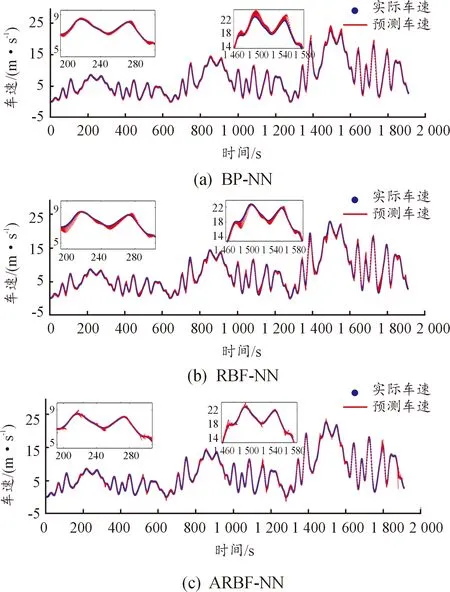
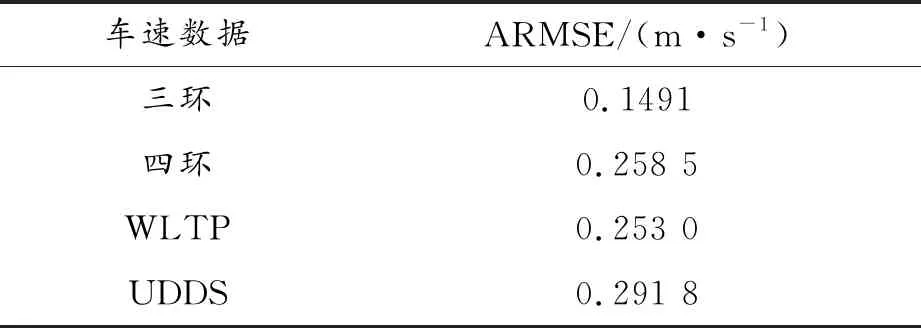
5: fort=1;t 6:Samplein(:,t)=x(t:t+p-1) 7:Sampleout(:,t)=x(t+p:t+p+h-1) 8:SDKin(:,t)=x(t+p+h:t+2*p-1) 9:SDKout=x(t+2*p:t+2*p+h-1) 10:Sampletest=x(t-h+1:t) 11: end for 12: 利用k-均值聚類算法計算基函數中心c 13:Z=dist(Samplein,c); 14:G=exp(-Z/2*h2); (計算隱藏層輸出值) 15:W=pinv(G)*Sampleout; (計算隱藏層到輸出層連接權值) 16:SDKZ=dist(SDKin,c); (結構確定模塊確定結構參數) 17:SDKG=exp(-SDKZ/2*h2); 18:SDKout=W*SDKG; 19:err=SDKd-SDKout 20:ARMSE=sqrt(mean(err2))/ti-(h+p) 21:AIC=T*ARMSE+2*h 22:選擇min(AIC)對應的h和p 23:ZZ=dist(Sampletest,c); 24:GG=exp(-ZZ/2*h2);(計算隱藏層輸出值) 25:out=W*GG; (計算未來5 s 預測車速) 26: end for 27: end for 28:ti=ti+1 29: end while 為了驗證ARBF-NN預測效果,選取BP和傳統RBF-NN進行對比驗證。由于車輛行駛行為存在一定內在規律,即在相同或者相似的歷史車速軌跡下,未來短期有相同甚至相似的車速變化[10]。為使用合理樣本對BP-NN車速預測模型進行訓練以保證模型可以對車輛行駛行為內在規律進行有效學習,利用由2 710 s北京四環城市道路自然駕駛速度數據以及1 792 s WLTP、1 184 s NEDC和1 369 s UDDS測試工況組成的共7 055 s的車速數據對BP-NN車速預測模型進行離線訓練,輸出車速預測結果如圖7(a)所示;對于RBF-NN車速預測模型,以最小ARMSE對應的結構參數(輸入層神經元數目為5,基函數標準差為18)進行預測,預測結果如圖7(b)所示;ARBF-NN車速預測結果如圖7(c)所示。3種算法的車速預測結果如圖8所示。 圖7 BP-NN、RBF-NN和ARBF-NN車速預測結果 圖8 BP-NN、RBF-NN和ARBF-NN車速預測結果 由結果可知,與其他2種預測模型相比,ARBF-NN車速預測精度獲得明顯改善。RBF-NN車速預測結果RMSE穩定在1 m/s以內,而ARBF-NN車速預測結果RMSE基本小于0.5 m/s,整體預測效果明顯優于固定結構的RBF-NN預測方法。此外,在1 400 s及1 600~1 800 s階段,車輛存在短時間內頻繁加減速行為時,ARBF-NN預測精度效果提升明顯。這說明ARBF-NN通過在線調整參數能夠適應工況變化,實現更高精度的車速預測。 BP-NN、RBF-NN以及ARBF-NN在各工況下車速預測性能如表2所列。3種方法的預測結果ARMSE分別為0.375 8、0.384 9和0.175 3 m/s。所提出的ARBF-NN預測方法,相比于BP-NN精度提高53.36%,相比于RBF-NN精度提高54.47%。因此,所提出的ARBF-NN能夠滿足多工況的需求。 表2 BP-NN、RBF-NN和ARBF-NN車速預測結果 ARBF-NN預測方法參數調整過程如圖9所示。結果表明,相比于RBF-NN車速預測方法,ARBF-NN車速預測方法從預測開始就有更小的AIC值,這表示ARBF-NN車速預測方法有更好的擬合效果,且在全過程中隨車速變化可以實現輸入層神經元數目和基函數標準差的實時調節,因而具有更高的預測精度。 圖9 AIC計算結果及ARBF-NN參數選擇結果 為了確保所提出車速預測方法的可靠性和穩定性,在北京三環、北京四環真實速度數據以及WLTP、UDDS標準工況車速4種工況下進一步證明ARBF-NN的高精度車速預測效果。5 s時域的預測結果分別如圖10中(a)~(d)所示。由結果可知,北京三環車速預測結果RMSE基本小于1 m/s,由于車速變化趨勢較平緩,預測效果優于構建的全工況車速;北京四環車速預測結果在200 ~400 s由于車速急劇變化,出現2次較大誤差,其他時間段能保持較高精度預測效果;WLTP和UDDS工況下,車速預測結果RMSE基本小于2 m/s,預測精度穩定。表3列出了各車速數據下ARBF-NN預測結果ARMSE。結果表明,ARBF-NN對于多種車速數據下均有準確的預測精度。 圖10 ARBF-NN車速預測模型在不同工況下預測結果 表3 ARBF-NN多種車速數據下預測結果 綜上所述,本文提出的基于AIC的在線結構確定方法可以有效提高車速預測精度。 提出了一種基于參數在線調整的ARBF-NN車速預測方法,實現基于自身歷史車速數據的車速高精度在線預測。首先,搭建試驗系統進行真實工況速度數據采集,利用滑動時間窗口方法將車速數據樣本化;在分析輸入層神經元數目和基函數標準差對車速預測精度影響的基礎上,結合AIC準則對結構參數進行在線調整。最后,提出參數在線調整的ARBF-NN車速在線預測方法,實現了基于自車歷史數據的車速高精度在線預測。4種工況的仿真結果表明,所提出的車速預測方法具有較高精度,相比于BP-NN精度提高53.36%,相比于RBF-NN精度提高54.47%,可為電動汽車車輛能量管理提供理論參考。 在未來的工作中,我們將探尋環境車輛與自車相對位置關系和相對速度關系與自車車速之間所存在的內在規律,預測環境車輛影響下車速拐點出現的時刻,即未來短時自車加減速變化,并對預測車速進行修正,以減小車速拐點處出現的較大預測誤差,進一步提高車速預測精度。3 仿真分析
3.1 ARBF-NN車速預測模型結果對比



3.2 多工況下ARBF-NN預測效果分析

4 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
