智能自動(dòng)化機(jī)械手在環(huán)保車上的研究應(yīng)用
2022-12-25 06:45:30黃闖
大科技 2022年48期
黃闖
(廣州市環(huán)境衛(wèi)生機(jī)械設(shè)備廠有限公司,廣東 廣州 510450)
1 環(huán)保車現(xiàn)有上料方式
目前國(guó)內(nèi)環(huán)保車一般采用作業(yè)人員人工推桶上料,手動(dòng)靠置于環(huán)保車翻轉(zhuǎn)裝置上,再操作電氣按鈕驅(qū)動(dòng)翻轉(zhuǎn)裝置傾倒垃圾桶中的垃圾,后再人工推桶放回原處。圖1 為環(huán)保車人工側(cè)上料,圖2 為環(huán)保車人工后上料。除環(huán)保車駕駛員外,需另配備1~2 名環(huán)衛(wèi)作業(yè)人員。勞動(dòng)強(qiáng)度大,上料效率低,運(yùn)營(yíng)人力成本高,衛(wèi)生條件差,同時(shí)也存在作業(yè)安全風(fēng)險(xiǎn)[1]。

圖1 環(huán)保車人工側(cè)上料

圖2 環(huán)保車人工后上料
2 新型車載智能自動(dòng)化機(jī)械手上料機(jī)構(gòu)
車載智能自動(dòng)化機(jī)械手由底座、吊臂、連桿、導(dǎo)軌、翻轉(zhuǎn)臂組成四連桿機(jī)構(gòu)來(lái)實(shí)現(xiàn)各所需動(dòng)作,如圖3 所示。底座通過(guò)拉碼和連接板固定于底盤縱梁上面。在垃圾收運(yùn)時(shí)駕駛員通過(guò)整車監(jiān)控系統(tǒng)來(lái)判斷機(jī)械手與垃圾桶之間的距離,從汽車底盤取力,帶動(dòng)液壓油泵輸出高壓油,驅(qū)動(dòng)伸出油缸使導(dǎo)軌運(yùn)動(dòng),從而帶動(dòng)翻轉(zhuǎn)臂的伸出與縮回,如圖4 所示[2]。翻轉(zhuǎn)臂到達(dá)合適位置后,抱桶油缸驅(qū)動(dòng)抱桶臂運(yùn)動(dòng),使垃圾桶被緊緊的束縛夾緊在抱桶臂中間。再控制翻轉(zhuǎn)油缸驅(qū)動(dòng)翻轉(zhuǎn)臂沿著導(dǎo)軌翻轉(zhuǎn),使垃圾桶中垃圾傾泄到車廂壓縮腔內(nèi),整個(gè)機(jī)械臂的操作順序?yàn)樯斐觥⒈啊⒎D(zhuǎn)、下降、松桶、縮回,如圖5 所示。可伸出汽車側(cè)面1.5m 對(duì)垃圾桶進(jìn)行抓取,并翻轉(zhuǎn)150°傾倒垃圾[3]。
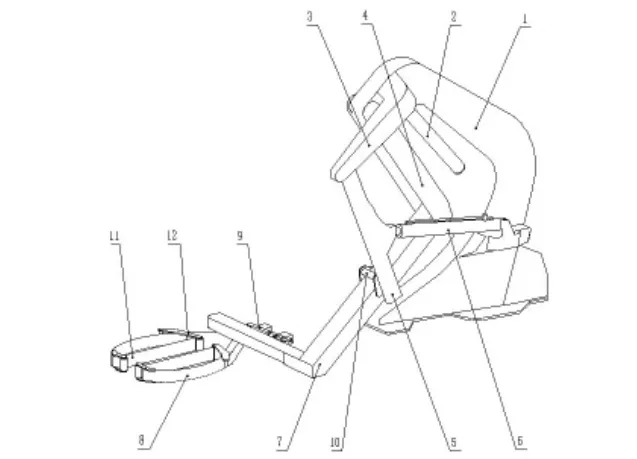
圖3 機(jī)械手結(jié)構(gòu)
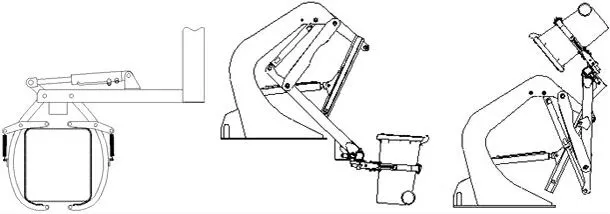
圖4 機(jī)械手抱桶和翻桶
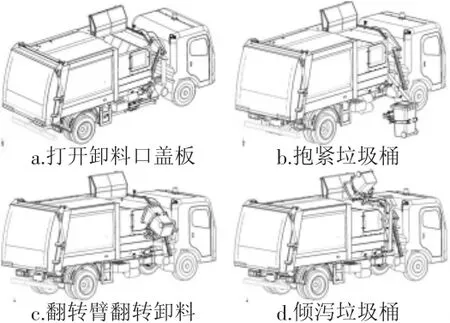
圖5 作業(yè)過(guò)程
3 車載智能自動(dòng)化機(jī)械手上料機(jī)構(gòu)設(shè)計(jì)計(jì)算
3.1 翻轉(zhuǎn)能力計(jì)算
(1)機(jī)械手原位抱桶翻轉(zhuǎn),如圖6 所示。
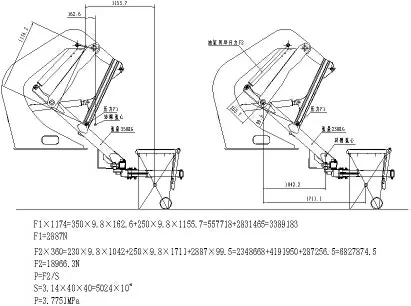
圖6 機(jī)械手原位抱桶翻轉(zhuǎn)
(2)機(jī)械手臂最大伸出距離1.5m 處抱桶翻轉(zhuǎn),如圖7 所示。
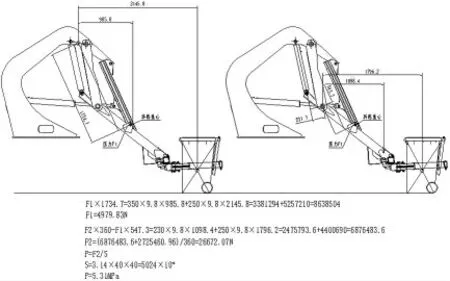
圖7 機(jī)械手臂最大伸出距離處抱桶翻轉(zhuǎn)
機(jī)械手系統(tǒng)壓力定為14MPa>5.31MPa,故機(jī)械手抱桶臂在垃圾桶滿載時(shí)也能輕松翻轉(zhuǎn)傾倒。
3.2 抱桶臂受力分析
設(shè)定240L 塑料桶滿載后最大重量為m=250kg,G=m×g=250×10=2500N。
設(shè)定抱桶帶與塑料桶之間的摩擦系數(shù)為0.5,抱帶對(duì)抱臂產(chǎn)生的壓力為F,抱臂受到的垂直向下的壓力F1,則計(jì)算方式如式(1)所示。

以抱臂上兩處轉(zhuǎn)軸為受力面進(jìn)行分析,分別2500N 的力,經(jīng)受力分析最大應(yīng)力處值為197MPa<235MPa(材料本身屈服強(qiáng)度)。
安全系數(shù)為u=235/197=1.193,滿足設(shè)計(jì)要求。
抱桶臂結(jié)構(gòu)采用柔性設(shè)計(jì),可適應(yīng)不同大小的120L和240L 標(biāo)準(zhǔn)塑料垃圾桶,適應(yīng)范圍廣,如圖8 所示。
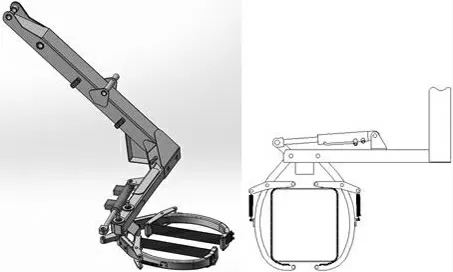
圖8 抱桶臂
3.3 在車輛底盤上的布置方式
該機(jī)械手機(jī)構(gòu)位于底盤駕駛室后方,采用連接件與底盤大梁連接固定,從底盤發(fā)動(dòng)機(jī)取力,帶動(dòng)液壓油泵,輸出高壓油,再通過(guò)液壓閥組控制各動(dòng)作油缸伸出和縮回,輸出動(dòng)力驅(qū)動(dòng)結(jié)構(gòu)臂運(yùn)動(dòng),實(shí)現(xiàn)各個(gè)動(dòng)作的操作,如圖9 所示。
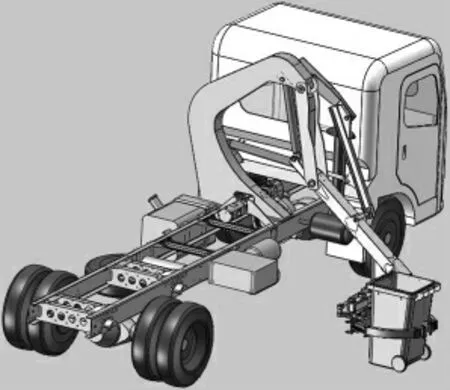
圖9 車輛底盤上的布置方式
機(jī)械手操作方式分為自動(dòng)與手動(dòng)兩種控制方式,其中自動(dòng)方式為:控制操作手柄朝正前方“伸出”位置推出,此時(shí)通過(guò)駕駛室監(jiān)控器觀察機(jī)械手抱臂系統(tǒng)與垃圾桶之間的距離,使機(jī)械手抱捅臂到達(dá)抱桶位置(此位置需實(shí)際操作后確定);控制操作手柄朝右側(cè)“抱桶”位置推出,且維持操作手柄處于右側(cè)“抱桶”位置,使抱臂抱緊垃圾桶;此時(shí)機(jī)械手抱臂系統(tǒng)自動(dòng)實(shí)現(xiàn)舉升、下降、松桶、收回等動(dòng)作。采用了多方位的監(jiān)控系統(tǒng),做到了收運(yùn)動(dòng)作的可視化。既保證了車輛的正常收集作業(yè),也提高了作業(yè)安全性,如圖10 所示[4]。

圖10 操作手柄和視頻監(jiān)控
3.4 新型車載智能自動(dòng)化機(jī)械手上料機(jī)構(gòu)電控設(shè)計(jì)
電控設(shè)計(jì)如下:①裝卸料轉(zhuǎn)換開(kāi)關(guān)。②手自動(dòng)切換開(kāi)關(guān)。③頂蓋門轉(zhuǎn)換開(kāi)關(guān)。④操作手柄開(kāi)關(guān)。⑤舉升感應(yīng)開(kāi)關(guān)。⑥下降感應(yīng)開(kāi)關(guān)。⑦夾桶感應(yīng)開(kāi)關(guān)。⑧松桶感應(yīng)開(kāi)關(guān)。⑨回位接近開(kāi)關(guān)。⑩頂蓋門感應(yīng)開(kāi)關(guān)。控制器模塊。保險(xiǎn)。液壓多路閥。續(xù)流二極管。
電氣控制系統(tǒng)有手動(dòng)和自動(dòng)兩種工作模式,便于日常操作、特殊場(chǎng)景和維修不同情況下使用。油缸上集成有五個(gè)感應(yīng)開(kāi)關(guān),檢測(cè)油缸的初始和伸出到終點(diǎn)的位置,輸入信號(hào)作為邏輯控制判斷的依據(jù)。通過(guò)操作手柄開(kāi)關(guān)來(lái)控制機(jī)械手各個(gè)不同機(jī)構(gòu)的運(yùn)動(dòng),機(jī)構(gòu)的伸出和回位。抱桶機(jī)構(gòu)的抱桶和松桶,機(jī)械手機(jī)構(gòu)的舉升和下降,順序是伸出、夾桶、舉升、下降、松桶及回位。在操作操作手柄開(kāi)關(guān)時(shí)也應(yīng)按照這個(gè)順序,若未按這個(gè)順序操作,因控制程序邏輯上已做防呆處理,也不會(huì)造成機(jī)構(gòu)損壞。每個(gè)動(dòng)作的作業(yè)時(shí)間按實(shí)際情況作優(yōu)化調(diào)整,減少震動(dòng)使運(yùn)行平穩(wěn),并確保一次作業(yè)時(shí)間高效,如圖11 所示[5]。
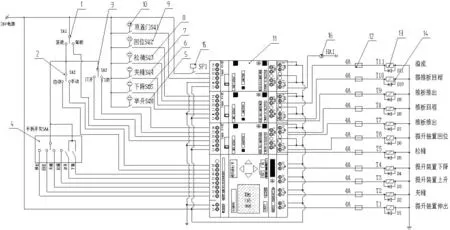
圖11 電控系統(tǒng)電路
自動(dòng)操作模式通過(guò)手自動(dòng)切換開(kāi)關(guān)轉(zhuǎn)換。先向伸出位推動(dòng)操作手柄開(kāi)關(guān),機(jī)械手機(jī)構(gòu)伸出直至離垃圾桶合適距離,向夾桶位操作手柄,進(jìn)行夾桶作業(yè),完成后,感應(yīng)開(kāi)關(guān)SQ4 發(fā)出對(duì)應(yīng)信號(hào),按控制程序進(jìn)行舉升倒料,到位后感應(yīng)開(kāi)關(guān)SQ6 發(fā)出對(duì)應(yīng)信號(hào),控制機(jī)構(gòu)翻轉(zhuǎn)下降,到位后感應(yīng)開(kāi)關(guān)SQ5 發(fā)出對(duì)應(yīng)信號(hào),完成松桶的動(dòng)作,感應(yīng)開(kāi)關(guān)SQ3 發(fā)出對(duì)應(yīng)信號(hào),控制機(jī)構(gòu)回位,到位后感應(yīng)開(kāi)關(guān)SQ2 發(fā)出信號(hào),停止動(dòng)作,一次作業(yè)循環(huán)動(dòng)作完成。若出現(xiàn)特殊狀況需要停機(jī)時(shí),按下操作手柄開(kāi)關(guān)中“下降”按鈕,為減少按鈕數(shù)量,于自動(dòng)模式,當(dāng)急停按鈕用。
手動(dòng)操作模式通過(guò)手自動(dòng)切換開(kāi)關(guān)轉(zhuǎn)換。先向伸出位推動(dòng)操作手柄開(kāi)關(guān),到位后將操作手柄開(kāi)關(guān)回位,機(jī)構(gòu)停止工作。其他動(dòng)作的作業(yè)方式類同。
4 新型車載智能自動(dòng)化機(jī)械手上料機(jī)構(gòu)的試驗(yàn)及應(yīng)用
車載智能自動(dòng)化機(jī)械手上料機(jī)構(gòu)是一種全新的自動(dòng)上料機(jī)構(gòu),為了測(cè)試實(shí)際效果,本文采用1 臺(tái)總質(zhì)量為18t 的機(jī)械手環(huán)保車作為試驗(yàn)樣車,如圖12、圖13所示,測(cè)試數(shù)據(jù)如表1 所示。

圖12 試驗(yàn)樣車

圖13 翻塑料垃圾桶試驗(yàn)
從翻桶試驗(yàn)及表1 可以看出,駕駛員不下車即可操作,操作便利,舒適性好,同時(shí)不下車也提高了安全性。實(shí)際裝載速度15s,速度快且效率高。良好達(dá)成了設(shè)計(jì)初衷。該機(jī)械手裝置可以廣泛應(yīng)用于環(huán)保車各種不同車型和不同噸位的產(chǎn)品上。
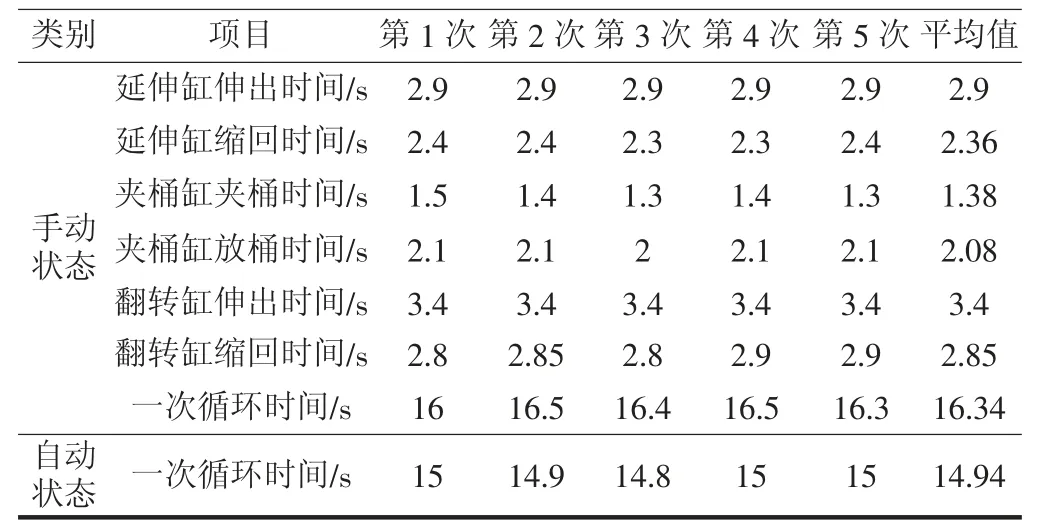
表1 機(jī)械手上料機(jī)構(gòu)的測(cè)試數(shù)據(jù)
5 結(jié)語(yǔ)
通過(guò)新型車載智能自動(dòng)化機(jī)械手上料機(jī)構(gòu)的研究,應(yīng)用于環(huán)保車上實(shí)現(xiàn)了垃圾桶的自動(dòng)抓取、傾倒、回位等動(dòng)作,駕駛員兼環(huán)衛(wèi)作業(yè)工人在人不下車的情況下就能完成所有環(huán)衛(wèi)作業(yè),達(dá)到了以下良好效果。
(1)提升了國(guó)內(nèi)環(huán)保車自動(dòng)化水平,為環(huán)保車技術(shù)發(fā)展提供了新的借鑒。
(2)提高了車輛作業(yè)效率,實(shí)現(xiàn)垃圾收運(yùn)的高效化,減輕了環(huán)保作業(yè)人員勞動(dòng)強(qiáng)度,同時(shí)不下車作業(yè)也提升了人身安全性。
(3)降低了運(yùn)營(yíng)成本,以前1 名駕駛員加1~2 名環(huán)衛(wèi)作業(yè)人員,現(xiàn)只需1 名即可完成。
(4)在目前疫情常態(tài)防疫的情況下,作業(yè)衛(wèi)生條件好,不與垃圾接觸,對(duì)作業(yè)人員防疫也是一種保護(hù)。
猜你喜歡
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
電腦報(bào)(2020年35期)2020-09-17 13:25:53
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
故事大王(2016年7期)2016-09-22 17:30:08
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
