自動駕駛技術(shù)發(fā)展現(xiàn)狀與發(fā)展分析
2022-12-25 06:45:32尹雪權(quán)
大科技 2022年48期
關(guān)鍵詞:發(fā)展
尹雪權(quán)
[科學(xué)城(廣州)信息科技集團有限公司,廣東 廣州 510670]
0 引言
為確保社會出行環(huán)境的安全及有序,世界上許多國家都開始了自動駕駛技術(shù)研究,未來用無人駕駛車替代輔助駕駛操作系統(tǒng)。當(dāng)前自動駕駛技術(shù)已經(jīng)取得了一定的研究成果,并且初步投入使用。但其仍舊有一些問題還未解決,大范圍推廣仍有一定的難度。基于此有必要對自動駕駛技術(shù)的發(fā)展現(xiàn)狀與未來發(fā)展進行分析,以梳理自動駕駛技術(shù)的發(fā)展情況,明確自動駕駛技術(shù)的發(fā)展空間與發(fā)展前景。
1 自動駕駛技術(shù)簡介
自動駕駛技術(shù)是應(yīng)用于車輛的自動化控制技術(shù)[1]。因此自動化駕駛技術(shù)的研究與發(fā)展需要多個技術(shù)的支撐。其中主要有環(huán)境感知技術(shù)、高精度定位技術(shù)、場景認(rèn)知技術(shù)、協(xié)同決策技術(shù)以及人機共駕技術(shù)等。這些技術(shù)是自動駕駛技術(shù)的組成部分,也是自動駕駛技術(shù)的動力支撐。同時自動駕駛技術(shù)的完善與不斷發(fā)展也仰賴于這些技術(shù)的發(fā)展與提升。
關(guān)于自動駕駛技術(shù)有兩種等級劃分標(biāo)準(zhǔn):①美國汽車工程師學(xué)會提出的等級劃分標(biāo)準(zhǔn)。②我國清華大學(xué)提出來的等級劃分標(biāo)準(zhǔn)。美國汽車工程師學(xué)會將自動駕駛技術(shù)分為了六個層次,分別是零級的手動、一級的駕駛輔助、二級的部分自動、三級的有限制自動化、四級的高度自動以及五級的完全自動。我國清華大學(xué)將自動駕駛技術(shù)按照“人”“馬”“騎士與馬”分為了三個層次,如圖1 所示,分別是與“人”相對應(yīng)的離線駕駛輔助,與“馬”相對應(yīng)的局部自動駕駛以及與“騎士與馬”相對應(yīng)的自主駕駛(無人駕駛)、人機協(xié)同。總體而言,自動駕駛技術(shù)給汽車行業(yè)帶來了新的變革,促使汽車行業(yè)邁入了新的發(fā)展趨勢。
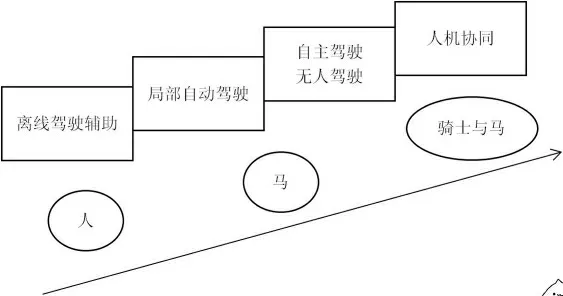
圖1 清華大學(xué)出具的自動駕駛技術(shù)分級標(biāo)準(zhǔn)
2 自動駕駛技術(shù)發(fā)展現(xiàn)狀
基于自動駕駛技術(shù)在道路交通方面的應(yīng)用優(yōu)勢,自動駕駛技術(shù)已經(jīng)得到了較為廣泛的研究與發(fā)展[2]。同時自動駕駛技術(shù)是由多種技術(shù)構(gòu)成的,本文對自動駕駛技術(shù)的各支撐技術(shù)進行發(fā)展現(xiàn)狀分析,以期通過各支撐技術(shù)的發(fā)展現(xiàn)狀獲悉自動駕駛技術(shù)的發(fā)展現(xiàn)狀。
2.1 自動駕駛技術(shù)中環(huán)境感知技術(shù)
環(huán)境感知技術(shù)即對道路環(huán)境進行精確感知,從而規(guī)劃出合理和安全的出行路線,如圖2 所示。因此環(huán)境感知技術(shù)是自動駕駛技術(shù)的有力支撐。環(huán)境感知技術(shù)多用于車載環(huán)境感知傳感器,常見的有視覺類傳感器與車載雷達傳感器等。交叉路口、坡道等道路環(huán)境常會存在一定的視覺盲區(qū),進而產(chǎn)生駕駛安全威脅。以往的雷達與視覺方案并不能沖破傳感器自身的限制,難以提供安全及準(zhǔn)確的出行路線。環(huán)境感知技術(shù)當(dāng)前的感知能力與識別精度也尚未達到理想程度,進而難以推進自動駕駛技術(shù)的飛速發(fā)展。基于此,我國正在研究精知技術(shù),如深度學(xué)習(xí)技術(shù)、車路協(xié)同感知技術(shù)等。

圖2 環(huán)境感知技術(shù)
以廣東省為例,廣東省極為重視自動駕駛技術(shù)的研究與發(fā)展。廣東已將自動駕駛技術(shù)應(yīng)用在了無人小巴與無人出租車上,從而展示了自動駕駛技術(shù)在有限空間內(nèi)的應(yīng)用優(yōu)勢。同時基于自動駕駛技術(shù)的局限性,廣東也建立了相應(yīng)的“自動駕駛與智慧交通示范區(qū)”,助力自動駕駛技術(shù)的進一步研究與升級。為進一步實現(xiàn)車路協(xié)同感知技術(shù)的發(fā)展創(chuàng)新,廣東省還組織舉辦了立足于華南地區(qū)的自動駕駛技術(shù)交流會。
2.2 自動駕駛技術(shù)中高精度定位技術(shù)
高精度定位技術(shù)能夠為自動駕駛車輛提供精確的路徑規(guī)劃,從而提高出行效率[3]。高精度定位技術(shù)還能夠根據(jù)定位結(jié)果自動進行避障規(guī)劃,從而確保出行安全。因此高精度定位技術(shù)也是自動駕駛技術(shù)不可缺少的助力之一,此技術(shù)保障著自動駕駛技術(shù)的出行效率與出行安全。當(dāng)前發(fā)展情況下高精度定位技術(shù)的研究與發(fā)展仍舊面臨著不小的挑戰(zhàn)。首先,高精度定位技術(shù)仍舊存在著不小的覆蓋盲區(qū),進而使得高精度定位技術(shù)的覆蓋范圍大打折扣,影響了高精度定位技術(shù)的進一步發(fā)展及應(yīng)用。其次,高精度定位技術(shù)的開發(fā)和應(yīng)用成本較為高昂。高昂的成本使得高精度定位技術(shù)適用性不足。
但高精度定位技術(shù)又是自動駕駛技術(shù)必不可少的組成部分。因此我國各主流地圖軟件正在積極進行自動駕駛的高精度地圖建設(shè)。廣東省內(nèi)擁有眾多科技產(chǎn)業(yè),進而為高精度定位技術(shù)的研發(fā)打下了堅實的技術(shù)基礎(chǔ)。同時北斗地基增強系統(tǒng)也逐步投入使用,以北斗地基增強系統(tǒng)為基礎(chǔ)的多源輔助定位技術(shù)以及高精度定位技術(shù)將會得到進一步的提升,其成本顯著降低及覆蓋盲區(qū)顯著減少。
2.3 自動駕駛技術(shù)中控制與執(zhí)行技術(shù)
控制與執(zhí)行技術(shù)是實現(xiàn)汽車自動駕駛的前提條件[4]。因此控制與執(zhí)行技術(shù)也是自動駕駛技術(shù)的重要組成部分之一,如圖3 所示,其關(guān)系著自動駕駛技術(shù)的應(yīng)用與發(fā)展。控制與執(zhí)行技術(shù)主要應(yīng)用于自動駕駛汽車的控制系統(tǒng),負責(zé)自動駕駛車輛的制動、油門以及轉(zhuǎn)向等。控制與執(zhí)行技術(shù)最主要的應(yīng)用作用為確保自動駕駛車輛的行動軌跡與決策層的規(guī)劃軌跡相符。當(dāng)前發(fā)展情況下控制與執(zhí)行技術(shù)已經(jīng)得到了一定的發(fā)展,在自動駕駛車輛中有所應(yīng)用。但控制與執(zhí)行技術(shù)仍舊面臨著較大的發(fā)展挑戰(zhàn)。控制與執(zhí)行技術(shù)在面對復(fù)雜路況和非常態(tài)道路環(huán)境時還尚未能做出及時正確的反饋,因此其靈敏性有待加強。

圖3 控制與執(zhí)行技術(shù)
自動駕駛技術(shù)仍有較大的發(fā)展與改進空間,尚未具備大規(guī)模投入使用的條件。為沖破控制與執(zhí)行技術(shù)的限制,廣東省建立了專門的自動駕駛試驗基地,以測試控制與執(zhí)行技術(shù)在不同路況與道路環(huán)境下的靈敏度。綜合以上幾點來看,廣東省極為重視自動駕駛技術(shù)的研究與發(fā)展,在自動駕駛技術(shù)上投入了較多的資金、技術(shù)與場地。并且廣東省已經(jīng)取得了較為明顯的發(fā)展優(yōu)勢,廣東科技廳舉辦的相關(guān)展示活動顯示廣東省已實現(xiàn)了自動駕駛技術(shù)在出租車、農(nóng)業(yè)等應(yīng)用場景的實際應(yīng)用。
3 自動駕駛技術(shù)的發(fā)展分析
3.1 自動駕駛技術(shù)的發(fā)展趨勢
自動駕駛技術(shù)推動了汽車行業(yè)的大變革,促進了信息通信技術(shù)與汽車產(chǎn)業(yè)的高度融合。總體而言自動駕駛技術(shù)促使汽車行業(yè)走向了新的發(fā)展態(tài)勢。同時汽車行業(yè)的大變革也為自動駕駛技術(shù)提供了更為廣闊的發(fā)展前景與發(fā)展空間,推動了自動駕駛技術(shù)的進一步發(fā)展。除此以外自動駕駛技術(shù)的研究與發(fā)展也是展現(xiàn)我國工業(yè)實力的重要媒介。自動駕駛技術(shù)的研究與發(fā)展代表著我國國民經(jīng)濟的潛在增長,代表著我國工業(yè)制造領(lǐng)域和新興技術(shù)的有效融合。
當(dāng)前發(fā)展情況下,自動駕駛技術(shù)的發(fā)展空間呈現(xiàn)出日益增大的趨勢。自動駕駛車輛的逐步投入使用也充分展現(xiàn)了自動駕駛技術(shù)的應(yīng)用優(yōu)勢。自動駕駛車輛將在未來的汽車市場中占據(jù)越來越大的購買比例。自動駕駛技術(shù)目前還存在著一定的技術(shù)瓶頸。因此自動駕駛技術(shù)的應(yīng)用場景還有所限制。但隨著技術(shù)投入與資金投入的加大,自動駕駛技術(shù)的技術(shù)瓶頸勢必會有所突破。自動駕駛技術(shù)的技術(shù)瓶頸被突破以后,自動駕駛車輛的應(yīng)用場景將會得到進一步的擴展,甚至取代封閉路網(wǎng)地區(qū),使得無人港口和無人貨場成為發(fā)展主流[5]。
除此以外,自動駕駛的景區(qū)擺渡車也將會出現(xiàn)在大眾面前,進而為景區(qū)的游客提供更新穎的觀光體驗。城市公共建設(shè)則會有一定的過渡時期,自動駕駛技術(shù)初步投入道路行駛后,將會出現(xiàn)自動駕駛公共汽車、出租車以及私家車混行的情況。如果試驗情況良好的話,后期甚至有可能會出現(xiàn)自動駕駛車輛獨占路權(quán),非自動駕駛車輛不可上路行駛的情況。自動駕駛車輛展示如圖4 所示。

圖4 自動駕駛車輛展示
3.2 自動駕駛技術(shù)的發(fā)展困境
從自動駕駛技術(shù)的發(fā)展情況來看,自動駕駛技術(shù)有著較為突出的應(yīng)用優(yōu)勢。并且自動駕駛技術(shù)的大范圍應(yīng)用也已經(jīng)可以預(yù)見。但自動駕駛技術(shù)仍面臨著較多的發(fā)展困境,延緩了自動駕駛技術(shù)的推進步伐。具體有以下3 點。
(1)自動駕駛技術(shù)發(fā)展面臨著道德困境。“電車難題”本是用于反思功利主義。目前“電車難題”也可用來解釋自動駕駛技術(shù)所面臨的道德困境。“電車難題”假設(shè)的是在死亡事故無法避免的情況下,電車司機應(yīng)做出怎樣的選擇,電車司機選擇與否是否會違背道德。體現(xiàn)在自動駕駛技術(shù)上即由誰來作為道德主體。“電車難題”中電車司機是道德主體。同時電車司機也是承擔(dān)主體,其選擇所帶來的后果由電車司機來承擔(dān)。但自動駕駛車輛所造成的安全事故卻無法準(zhǔn)確衡量道德主體。自動駕駛技術(shù)只是一種技術(shù),而人并沒有參與駕駛活動[6]。
(2)自動駕駛技術(shù)發(fā)展面臨著法律解釋困境。法律解釋困境與道德困境有著相通之處,即法律層面也無法判定責(zé)任主體。責(zé)任主體在法律層面的模糊不清將會使得自動駕駛技術(shù)存在較大的漏洞,進而影響自動駕駛技術(shù)的推廣使用。
(3)自動駕駛技術(shù)發(fā)展面臨著技術(shù)采集與技術(shù)解釋的雙重困境。自動駕駛技術(shù)的正常應(yīng)用是以采集人類信息為基礎(chǔ)的。自動駕駛技術(shù)要對人類行為、圖像識別以及駕駛技能進行充分的學(xué)習(xí)與計算。基于自動駕駛技術(shù)對人類信息的全面了解,自動駕駛技術(shù)能夠確保封閉領(lǐng)域運輸?shù)木珳?zhǔn)性與安全性。但也僅限于封閉領(lǐng)域,開放領(lǐng)域的復(fù)雜性使得自動駕駛技術(shù)很難確保運輸安全與運輸?shù)臏?zhǔn)確性。
4 結(jié)語
綜上所述,自動駕駛技術(shù)有著極為廣闊的發(fā)展前景與發(fā)展空間。自動駕駛技術(shù)能夠有效確保交通安全,降低交通安全事故的發(fā)生率,對道路安全有著較為突出的意義。基于此本文從自動駕駛技術(shù)簡介、自動駕駛技術(shù)發(fā)展現(xiàn)狀、自動駕駛技術(shù)的發(fā)展分析這三個角度出發(fā),分析了自動駕駛技術(shù)的發(fā)展現(xiàn)狀與發(fā)展趨勢,以期對自動駕駛技術(shù)有所幫助。
猜你喜歡
中國核電(2021年3期)2021-08-13 08:56:36
中國臨床醫(yī)學(xué)影像雜志(2019年1期)2019-04-25 06:49:28
家庭影院技術(shù)(2018年11期)2019-01-21 02:20:52
紅土地(2018年12期)2018-04-29 09:16:48
華人時刊(2017年21期)2018-01-31 02:24:01
北方交通(2016年12期)2017-01-15 13:52:53
中國衛(wèi)生(2016年5期)2016-11-12 13:25:42
中國衛(wèi)生(2015年2期)2015-11-12 13:13:54
當(dāng)代縣域經(jīng)濟(2015年12期)2015-03-20 15:51:06
創(chuàng)業(yè)家(2015年7期)2015-02-27 07:54:15
