基于有限時間超螺旋滑模控制的船舶動力定位控制律設(shè)計(jì)
2022-12-28 04:49:28賀廣健劉海波宮勛彭程曹策
關(guān)鍵詞:船舶設(shè)計(jì)
賀廣健,劉海波,宮勛,彭程,曹策
(中國科學(xué)院長春光學(xué)精密機(jī)械與物理研究所,長春 130033)
隨著人類對海洋資源的不斷開發(fā)以及船舶自動化技術(shù)的日漸成熟,船舶動力定位技術(shù)已經(jīng)被廣泛地運(yùn)用在海洋作業(yè)中。船舶動力定位技術(shù)迫使船舶依靠自身的動力推進(jìn)系統(tǒng),來抵御風(fēng)浪流等海洋環(huán)境所造成的擾動,使得船舶在海面某一固定位置或者沿著目標(biāo)軌跡以一定的姿態(tài)保持航行[1-3]。動力定位技術(shù)具有不受水深限制、定位精度高與操控性強(qiáng)等優(yōu)點(diǎn),已在救助打撈船、科考船以及海洋鉆井平臺等領(lǐng)域廣泛應(yīng)用,是開發(fā)利用海洋工作中不可或缺的技術(shù)[4]。
船舶動力定位技術(shù)最開始采用經(jīng)典的PID控制,利用低通濾波器處理高頻信號,作為第一代動力定位系統(tǒng)取得了階段性的成果,但存在濾波技術(shù)引起的相位滯后以及定位精度低等缺點(diǎn)[5]。進(jìn)入20世紀(jì)70年代,采用將干擾分為高頻與低頻的線性二次型高斯控制,利用卡爾曼濾波技術(shù)處理高頻信號,可以解決低通濾波器引起的相位滯后,被稱為第二代動力定位系統(tǒng),由于線性二次型高斯控制基于線性模型,但船舶動力定位模型是非線性的并且準(zhǔn)確度不高,因此定位精度一般[6]。隨著控制理論的發(fā)展,文獻(xiàn)[7]采用自適應(yīng)PID控制器,利用李雅普諾夫穩(wěn)定性理論證明了船舶動力定位系統(tǒng)一致全局穩(wěn)定,并通過仿真驗(yàn)證控制器的有效性。文獻(xiàn)[8]利用了非線性模型預(yù)測控制技術(shù),實(shí)現(xiàn)了船舶動力定位控制器的設(shè)計(jì),通過仿真驗(yàn)證其有效性。文獻(xiàn)[9]采用將動態(tài)面技術(shù)與矢量逆推方法相結(jié)合設(shè)計(jì)船舶動力定位控制器,控制船舶的動力定位。文獻(xiàn)[10]基于滑膜控制算法,直接對控制輸入進(jìn)行設(shè)計(jì),提出一種二階滑膜控制算法,通過仿真驗(yàn)證控制器的有效性。這些方法在動力定位控制中取得了一定的成效,但在工程實(shí)踐中風(fēng)浪流等海洋環(huán)境對于船舶動力定位影響巨大,因此需要對風(fēng)浪流等海洋環(huán)境擾動進(jìn)行處理才能夠獲得較好的控制效果。
在20世紀(jì)90年代,韓京清[11]提出基于擴(kuò)張狀態(tài)觀測器(Extended State Observe,簡稱ESO)的控制策略。ESO的基本思想是將被控系統(tǒng)的內(nèi)部不確定項(xiàng)與外部干擾視為總擾動,通過設(shè)計(jì)一個理想的觀測器對被控系統(tǒng)的總擾動進(jìn)行觀測,獲得總擾動的估計(jì)值,在控制通道中設(shè)計(jì)前饋補(bǔ)償器將可估計(jì)總擾動給予精確抵消,從而實(shí)現(xiàn)抗擾動的目的[12]。韓京清提出的ESO是非線性結(jié)構(gòu)的,早期對于ESO的研究主要針對其理論證明[13-14]。文獻(xiàn)[15]首次提出線性自抗擾控制,將韓京清提出的非線性結(jié)構(gòu)線性化,并引入帶寬思想,使得越來越多的學(xué)者關(guān)注ESO。文獻(xiàn)[16]利用線性狀態(tài)觀測器估計(jì)總擾動,將線性自抗擾控制器應(yīng)用于伺服控制系統(tǒng),仿真實(shí)驗(yàn)證明相對于PID具有更好的魯棒性。近年來,隨著現(xiàn)代控制理論的進(jìn)一步發(fā)展,有限時間控制獲得越來越多的學(xué)者關(guān)注,文獻(xiàn)[17]與文獻(xiàn)[18]表明與非有限時間控制器相比,有限時間控制系統(tǒng)具有更好的抗干擾性與魯棒性。船舶動力定位系統(tǒng)所受環(huán)境干擾較大,因此研究船舶動力定位有限時間控制具有重要的意義。
受上述文獻(xiàn)啟發(fā),通過融合有限時間控制技術(shù)、擴(kuò)張狀態(tài)觀測器與超螺旋滑模控制方法,本文提出一種基于有限時間超螺旋滑模的船舶動力定位控制策略。將船舶的未建模動態(tài)和未知時變擾動視為總擾動,并構(gòu)造有限時間超螺旋擴(kuò)張狀態(tài)觀測器實(shí)時估計(jì)總擾動。進(jìn)而利用超螺旋滑模方法設(shè)計(jì)船舶動力定位超螺旋滑模控制律,取得了有限時間的船舶動力定位控制性能,同時設(shè)計(jì)保證船舶動力定位閉環(huán)控制系統(tǒng)的所有信號一致最終有界。應(yīng)用Marine Systems Simulator工具箱進(jìn)行仿真試驗(yàn),結(jié)果表明所提出的控制方案的實(shí)用性。
為了便于船舶動力定位控制律設(shè)計(jì),給出如下符號定義:
式中,χ=[χ1,…,χn]T,χi∈ ?,(i=1,…,n),?∈(0,1),sign(·)表示符號函數(shù)。
1 問題描述及先驗(yàn)知識
船舶動力定位系統(tǒng)僅考慮縱搖、橫搖和艏搖3個自由度的水平面運(yùn)動,因此船舶動力定位數(shù)學(xué)模型如下[19]:
式中,η=[xyψ]T表示船舶的位置向量,由北東坐標(biāo)系下的位置(x,y)和船舶艏搖角ψ組成;υ=[uvr]T表示船舶的速度向量,由附體坐標(biāo)系下的船舶橫搖速度u、縱搖速度v和艏搖角速度r組成;J(ψ)為北東坐標(biāo)系與附體坐標(biāo)系之間的旋轉(zhuǎn)矩陣,表達(dá)式為M∈R3×3表示包含附加質(zhì)量的慣性矩陣,且正定對稱的;D∈R3×3表示線性阻尼矩陣;τ=[τ1τ2τ3]T表示船舶推進(jìn)系統(tǒng)提供給船舶的等效合力與力矩組成的控制向量,由縱搖控制力τ1、橫搖控制力τ2與艏搖控制力矩τ3組成;d=[d1d2d3]T表示風(fēng)、浪流等海洋環(huán)境對船舶的等效擾動合力及力矩向量,由縱蕩擾動力d1、橫蕩擾動力d2與艏搖擾動力矩d3組成。
假設(shè):
(1)船舶動力定位運(yùn)動數(shù)學(xué)模型中的M與D是不確定的;
(2)船舶速度υ的變化率是有界的;
(3)由海洋環(huán)境中風(fēng)浪等對船舶的擾動d是未知時變且有界的,且變化率同樣是有界的。
注:由于船舶的動態(tài)性能與本身特性以及外部環(huán)境因素等均有聯(lián)系,因此船舶的動態(tài)模型很難準(zhǔn)確獲得,具有較為明顯的不確定性;海洋中風(fēng)浪流時常發(fā)生變化,但它們的能量是有限的,故對船舶產(chǎn)生的擾動也是界的,因此假設(shè)是合理的。
控制目標(biāo):考慮到動力定位船舶的動態(tài)不確定性與遭遇外界未知時變擾動情況下,構(gòu)造有限時間超螺旋擴(kuò)張狀態(tài)觀測器估計(jì)總擾動,基于此設(shè)計(jì)船舶動力定位超螺旋滑模控制律,以保證船舶的實(shí)際位置η達(dá)到并保持于期望的位置ηd=[xdydψd]T,其中 (xd,yd)為北東坐標(biāo)系下的期望位置,ψd為期望的船舶艏搖角。
引理1[20]存在如下動態(tài)系統(tǒng):

式中,f:D→Rn在D∈Rn在原點(diǎn)附近開區(qū)間是連續(xù)的,并有f(0) =0。如果存在連續(xù)方程V:D→R滿足如下條件:
(1)V是正定的;
(2)存在c> 0,θ∈ (0,1),并且在??D原點(diǎn)附近的開區(qū)間有:

則原點(diǎn)是動態(tài)系統(tǒng)(2)的平衡點(diǎn)。調(diào)節(jié)時間函數(shù)T1可以表示為:

式中,Va(xa(t0))表示Va(xa(t))的初始值;T1是連續(xù)的。
2 控制律設(shè)計(jì)與穩(wěn)定性分析
2.1 有限時間超螺旋擴(kuò)張狀態(tài)觀測器設(shè)計(jì)


2.2 基于超螺旋滑模控制的船舶動力定位控制律設(shè)計(jì)及穩(wěn)定性分析




3 仿真研究
3.1 控制律驗(yàn)證
本文采用挪威科技大學(xué)的Fossen等人針對船舶控制系統(tǒng),依據(jù)船舶的數(shù)學(xué)模型開發(fā)的Simulink工具箱MSS[22]進(jìn)行仿真研究。本文選擇DP Motion RAO model中的供給船(Supply Vessel)為例進(jìn)行仿真驗(yàn)證控制算法的有效性,該供給船的相關(guān)參數(shù)如表1所示。
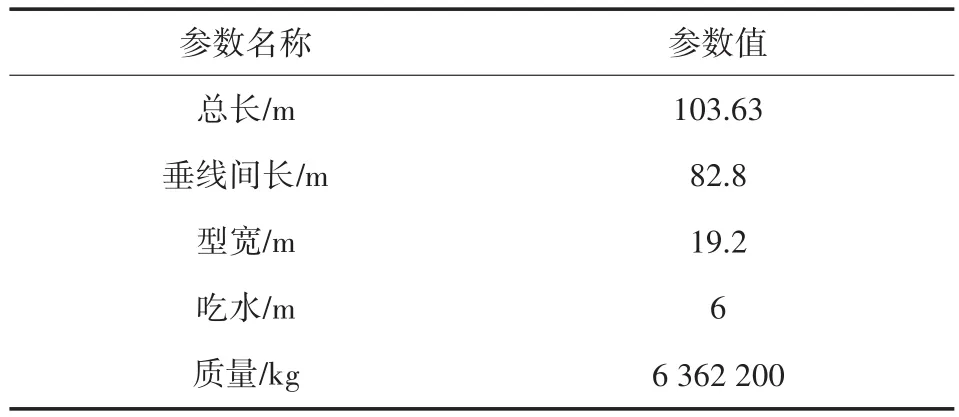
表1 船舶模型主要參數(shù)
本文設(shè)定船舶所遭受的海浪參數(shù)如下:海浪譜的類型為ITTC雙參數(shù)譜,有義波高為3 m,平均波向?yàn)?0°,波浪擴(kuò)散因子數(shù)值為2,對應(yīng)海況等級為4級。船舶初始狀態(tài)η(0 ) =[5m,5m,5°]T與υ(0)=[0,0,0]T,船舶的期望狀態(tài)ηd=[0m,0 m,0°]T與υd=[0,0,0]T;控制器的相關(guān)參數(shù)的選擇如下,有限時間超螺旋擴(kuò)張狀態(tài)觀測器部分:λ=1,β1=diag(1,1,5),β2=diag(1,1,20);船載穩(wěn)定平臺超螺旋滑模穩(wěn)定控制律部分:α1=diag(10,10,1),α2=diag(2,2,2)。
仿真結(jié)果如圖1~圖3中實(shí)線所示,性能指標(biāo)如表2所示。圖1為船舶狀態(tài)變化曲線,表明了船舶以較快的速度趨向于期望狀態(tài)ηd=[0m,0m,0°]T上,并且能夠保持在期望位置附近;圖2為船舶的速度變化曲線,表明了船舶以一定速度到達(dá)期望位置后,可以保持在期望位置上,即υd=[0,0,0]T;圖3為船舶推進(jìn)力和力矩變化曲線,曲線變化光滑合理符合實(shí)際需求。通過以上仿真結(jié)果驗(yàn)證了控制律的有效性。
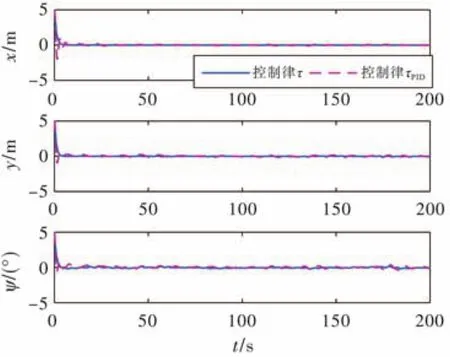
圖1 海況(a)下船舶位置與艏向角曲線
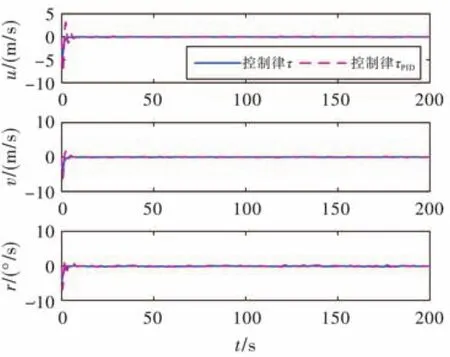
圖2 海況(a)下船舶速度曲線
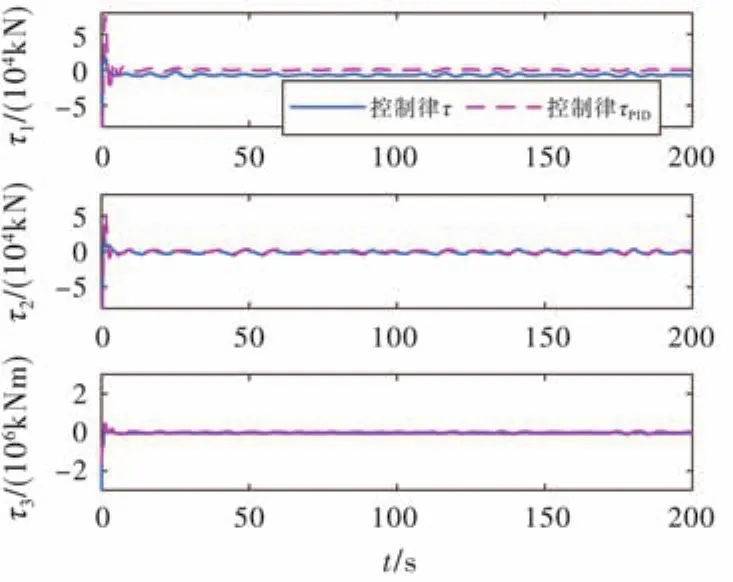
圖3 海況(a)下船舶控制力與力矩曲線
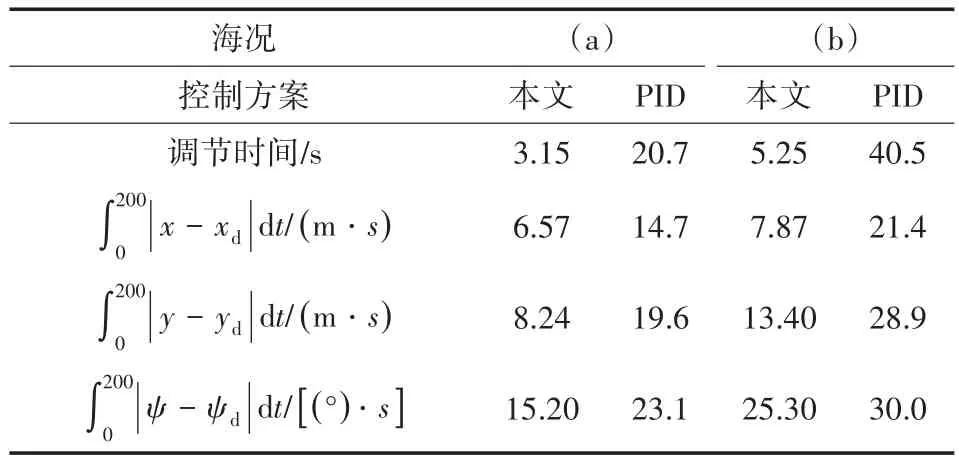
表2 控制方法性能指標(biāo)比較
3.2 控制性能比較
將本文所設(shè)計(jì)的控制律與現(xiàn)在大部分船舶動力定位系統(tǒng)采用的PID控制方法進(jìn)行比較。在兩種不同的海洋環(huán)境下,船舶初始條件、期望位置與控制參數(shù)相同。通過仿真對兩種控制方法進(jìn)行比較分析,海洋環(huán)境(a)中船舶所遭遇的環(huán)境擾動與3.1節(jié)中相同,海洋環(huán)境(b)中船舶所遭遇的環(huán)境擾動的海浪有義波高為5 m,其余海浪參數(shù)與3.1節(jié)中相同。在海況(a)下先調(diào)整PID的控制參數(shù),獲得較好的控制效果,其具體參數(shù)KP=diag(1.0×106,1.0×106,1.0×107),KI=diag(1.4×103,1.4×103,1.4×103)與KD=diag(3.0×107,3.0×107,3.0×108)。
在海況(b)下超螺旋滑模控制仿真結(jié)果如圖4~圖6中實(shí)線所示,性能指標(biāo)如表2所示。PID控制律在海況(a)和(b)下的仿真結(jié)果分別用虛線描繪在圖1~圖3和圖4~圖6中,PID控制律的性能指標(biāo)列在表2中。通過圖1~圖6與表2可以看出,在兩種不同海況下,本文所提出的控制方案的定位誤差的收斂速度都明顯優(yōu)于PID控制,同時船舶定位的穩(wěn)態(tài)誤差明顯小于PID控制方案的穩(wěn)態(tài)誤差,并且海況越大,本方案的優(yōu)越性越明顯。
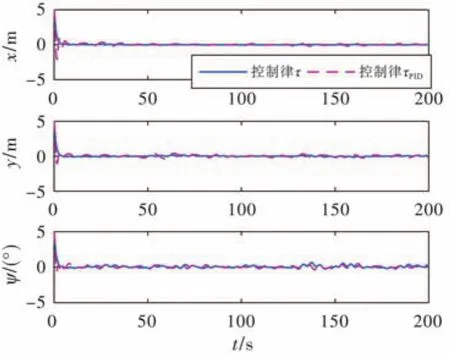
圖4 海況(b)下船舶位置與艏向角曲線
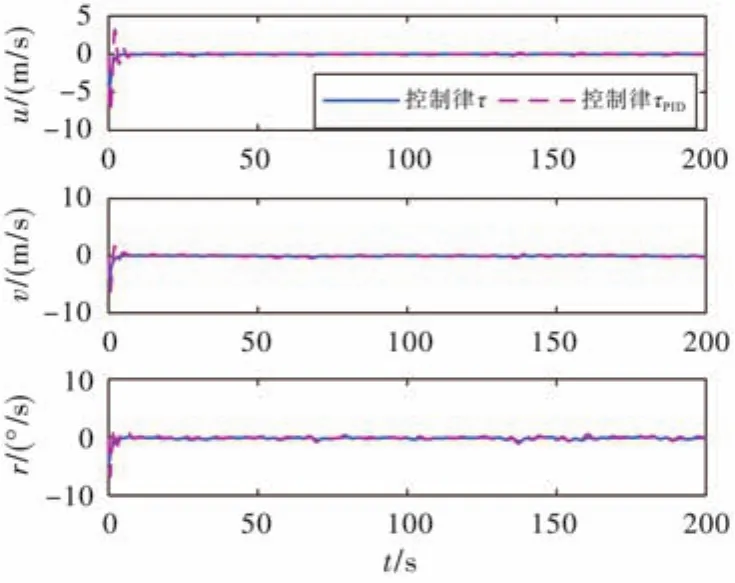
圖5 海況(b)下船舶速度曲線
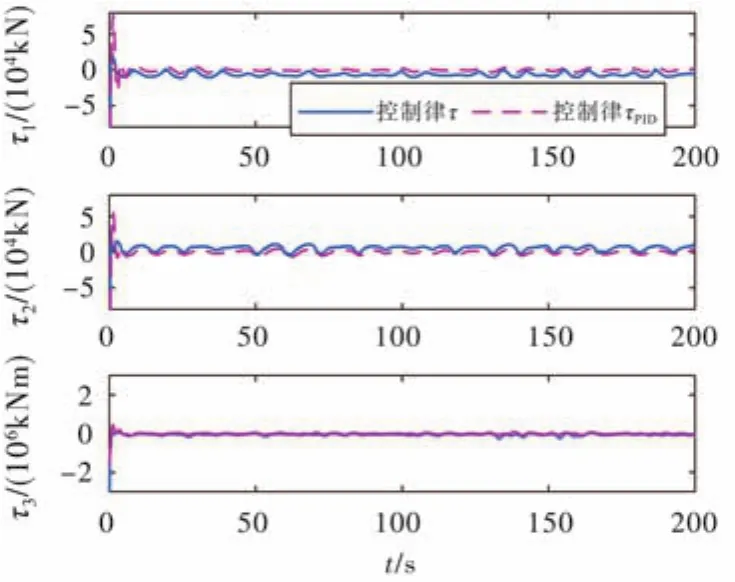
圖6 海況(b)下船舶控制力與力矩曲線
4 結(jié)論
本文考慮到海上作業(yè)動力定位船舶存在未建模動態(tài)和未知時變擾動,將船舶的未建模動態(tài)和時變未知海洋擾動視為總擾動,設(shè)計(jì)了有限時間超螺旋擴(kuò)張狀態(tài)觀測器估計(jì)該總擾動。借助李雅普諾夫穩(wěn)定性理論,證明了所設(shè)計(jì)的控制律通過選擇合適的控制參數(shù),能夠使得船舶的實(shí)際位置趨向并保持在目標(biāo)值上。最后,利用一艘Supply Vessel進(jìn)行仿真研究驗(yàn)證了所提出控制方案的有效性。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國船檢(2017年3期)2017-05-18 11:33:09