漁業養殖水質監測改善一體化水下機器人設計
2022-12-28 11:41:30陳凌軒吳清云謝辰旻馬帥華強嘉鈺
湖北農業科學 2022年19期
關鍵詞:水質
陳凌軒,吳清云,謝辰旻,馬帥華,強嘉鈺
(上海海洋大學,a.工程學院;b.外國語學院;c.海洋文化與法律學院,上海 201306)
隨著智能機器人行業的發展,各大行業“機器換人”已成為大趨勢。近年來,中國漁業養殖水體污染問題日益嚴重,通過水上或水下工程裝備代替人工取樣、測量等較人工水質調控更具高效性。如草魚最適宜生長環境pH為6.6~7.6,且對溶氧量的需求很高,需對其養殖環境加以調控,方可保障草魚的品質,鰱魚、鳙魚也對溶氧量及pH有一定要求。通過人工調控效率較低且成本高。
國外針對水下機器人的研究已進入應用化階段,當前中國水下機器人的應用研究仍處于起步階段。在漁業養殖實際應用中,水下機器人因其靈活性、作業時間長和工作范圍廣受到了世界各國的研究和關注。除了研究水下機器人結構的設計[1-4],水下機器人控制設計與仿真[5-8],水下機器人傳感技術與檢測[9-12],水下機器人應用[13-15]等,還應注重其應用與實現漁業養殖水質監測及水質改善的結合,根據局部水環境中存在的過界參數進行調整。當前國內仍未出現結合水質監測與水質調控于一體的設備,而西班牙海洋技術中心(CETMAR)研發了一款浮標[16],即可針對采樣樣本,通過微生物學參數的分析制定水質調控方案,其缺點在于采樣范圍局限,不適用于大范圍漁業養殖。歐美國家及日本也開發了相應的漁業養殖水下機器人,并得到了小規模應用。
本研究圍繞漁業養殖過程中對于水下機器人的需求及水下機器人開發成本高、國內同類產品少的現狀,研究基于多傳感器技術和自主巡航技術的水質監測及水質改善一體化水下機器人,從整體設計、運動建模及實物試驗3個角度入手,分析其功能與效果,可在漁業養殖監控、漁業水質改善方面發揮作用。
1 系統架構及工作原理
1.1 系統架構
水下機器人下位機為實現水下機器人功能的硬件電路模塊,通過穩壓電源對機器人各模塊供電。水下機器人包括水質監測模塊、水質改善模塊及自主巡航模塊等部分。下位機的架構實現了水下機器人的自動控制和工作,而上位機負責對水下機器人獲得的動態參數進行接收和顯示。水下機器人結構框架如圖1所示。
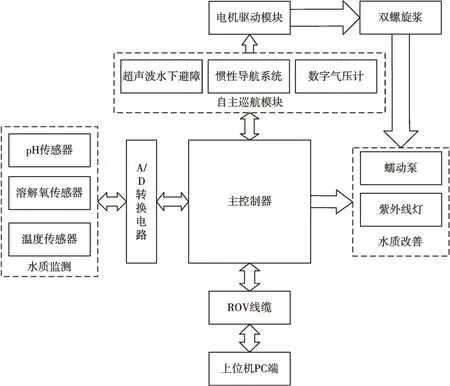
圖1 水下機器人結構框架
1.2 工作原理
水下機器人需在水環境中工作,在工作啟動前須通過程序設定巡航終點和深度,將水下機器人置于水中時即可啟動工作模式。水下機器人根據衛星定位模塊獲取巡航起始點及終點位置信息,慣性導航模塊用于水下無衛星信號環境下的實時定位,通過定位信息與相對位置信息控制螺旋槳,調整運行方向和深度,向終點方向及目標深度航行。水下機器人在航行過程中采集水質相關數據(pH、溫度、溶氧量等),搭載的多傳感器裝置定點定深度采集相關數據,并通過ROV線纜和無線通訊實現淺水區的水質數據傳輸在上位機平臺進行顯示。
1.3 結構設計
水下機器人整體呈膠囊狀結構,兩端外部設有法蘭連接裝置,下方設有4個螺旋推進器裝置,尾部設有渦輪平衡裝置。外部為抗壓防水殼體,前部艙內裝載驅動模塊,驅動模塊與防水外殼之間設置電路保護層,由主管和位于末端的整流罩組成。主管內設有主控制器及雙泵,連接層處設有ROV線纜接口,左右兩端分別對稱設置保護罩,保護罩內包含導流管與傳動軸。2個垂直螺旋推進器保證水下機器人的垂直方向運動,2個水平螺旋推進器用以實現水平方向的調整及運動,尾部渦輪平衡裝置控制水下機器人整體姿態平衡,避免大幅度擾動。水下機器人尾部包括第二法蘭連接裝置、防水外殼、渦輪推進器裝置及驅動模塊。圖2為水下機器人的渲染圖。

圖2 水下機器人渲染圖
2 控制系統
2.1 運動模型分析
漁業養殖用水下機器人在水下的運動控制受重力、浮力、水體阻力、自身推進力及外部擾動等的影響,其動力學系統為非動力系統。通過簡化受力模型分析其水下運動控制方式,根據國際水池會議(ITTC)以及造船與輪機工程學會(SNAME)術語公報推薦的坐標系[17],建立動坐標系(O-X′Y′Z′)與靜坐標系(E-XYZ)兩種類型坐標系,如圖3所示。表1為水下機器人運動參數。
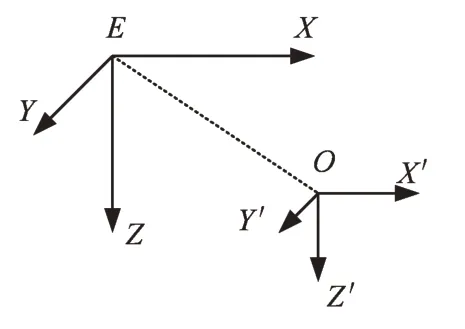
圖3 水下機器人運動分析坐標系
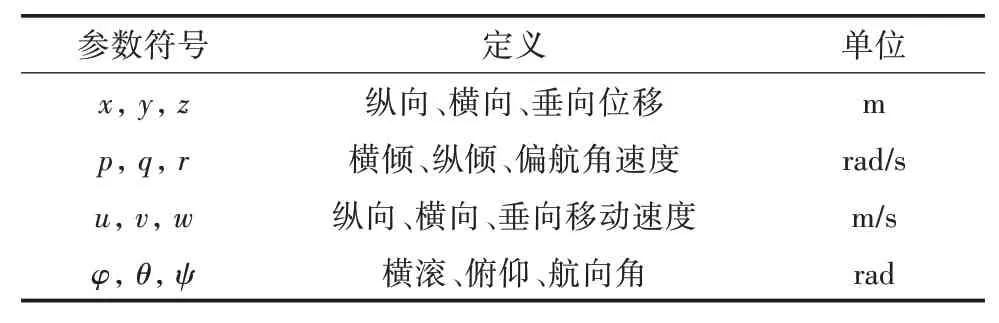
表1 水下機器人運動參數定義
靜坐標系與動坐標系之間的速度矢量可通過式(1)、式(2)及式(3)進行轉換。


J(η)為坐標轉換矩陣,其計算公式如式(4)所示。

六維度的水下機器人運動模型,其所有運動方式可在上述2種坐標系中得到描述,并分解為繞各自3個坐標軸的旋轉運動,其動力學模型[18-20]可通過式(5)所示方程描述。

式中,M為水下機器人慣性矩陣及水動力力矩;C(v)為水下機器人科氏力及離心力矩陣;D(v)為水下機器人流體阻尼矩陣;g(η)為水下機器人重力與浮力矩陣,又稱靜力矩陣。
基于以上分析及方程,完善動力學相應模型并進行計算簡化,由于水下機器人進行6個自由度內的運動,假設重心與動坐標系原點重合,此時Xg=Yg=Zg=0,根據式(5)可計算化簡得到平動方程及旋轉方程,如式(6)所示。
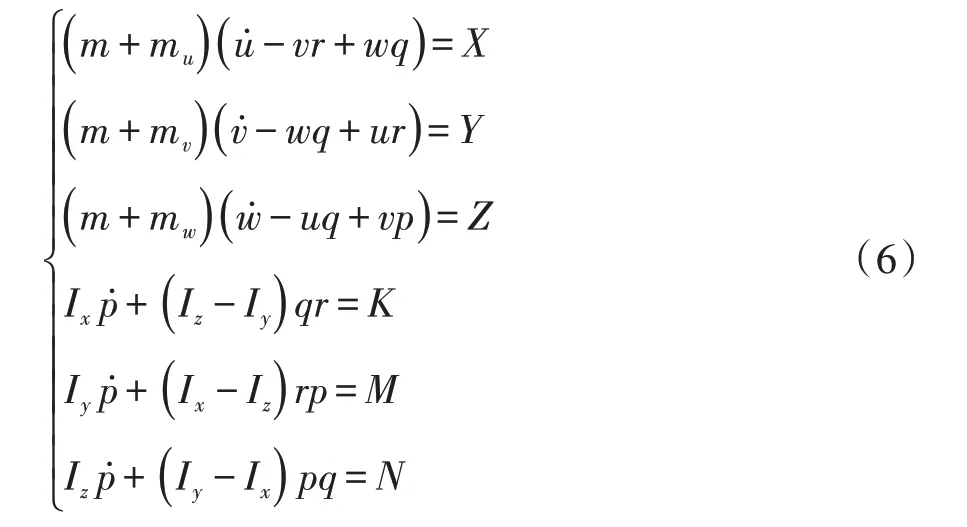
通過分析計算水下機器人在工作過程中的動力學方程,解出水下機器人的運動參數u、v、w、p、q、r,求解后根據式(1)、式(2)、式(3)反推出其靜態坐標系下的運動規律,解算出位移量及偏轉量。為了實現漁業養殖水域的需要,采用“前-后-上-下”四維度螺旋推進器的設計布局,如圖4所示。
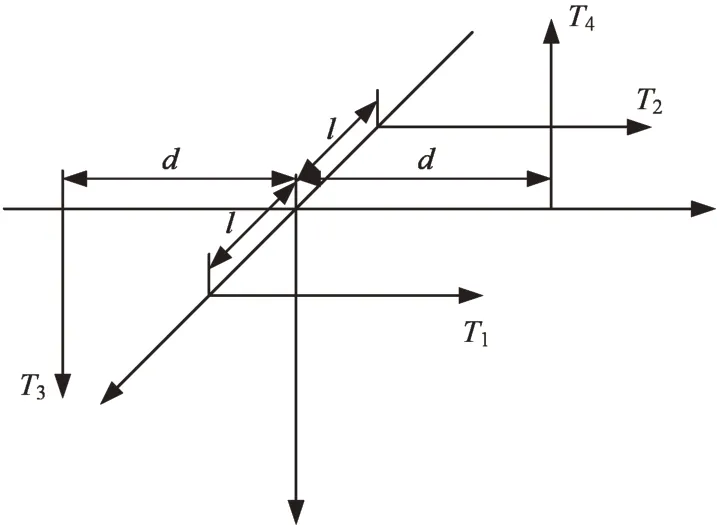
圖4 水下機器人螺旋推進器布局方式及受力
2.2 硬件部分
2.2.1 主控制器水下機器人的主控制器采用Ar?duino Mega 2560。Arduino Mega 2560是 一 種 采 用USB接口的核心電路板,具有54路輸入輸出,編程簡單,可在單個時鐘周期內執行功能強大的指令,可為許多嵌入式控制工作提供可行且低成本的支持。通過接多電路模塊及傳感器可實現環境感知并提取相關數據。
2.2.2 避障模塊水下機器人在水下工作過程中通過避障模塊避免與水下不明物體發生碰撞。避障模塊選用超聲波傳感器實現。超聲波傳感器測量障礙物與水下機器人的距離,根據需要控制指令設定避障方案[21,22]。其模塊電路構成如圖5所示。
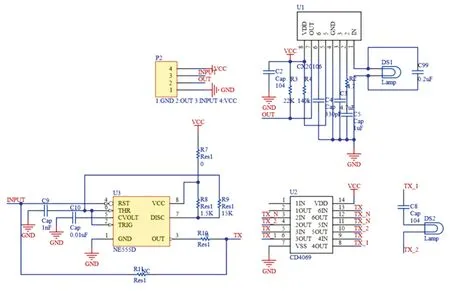
圖5 避障模塊電路結構
式(7)所示測距公式可推斷出水下物體與水下機器人前部相對位置關系。

式中,s為水下物體與水下機器人前部的距離;v為超聲波在水中傳播的速度;t為從發出脈沖到脈沖返回的時間。
水中超聲波傳播速度約為1 300~1 600 m/s。超聲波在水中傳播速度與水的渾濁度無明顯關系[23];當溫度為T時,文獻[24]中得出了溫度對超聲波在水中傳播速度v的近似解析式為:

由此繪制出如圖6所示的函數關系曲線。
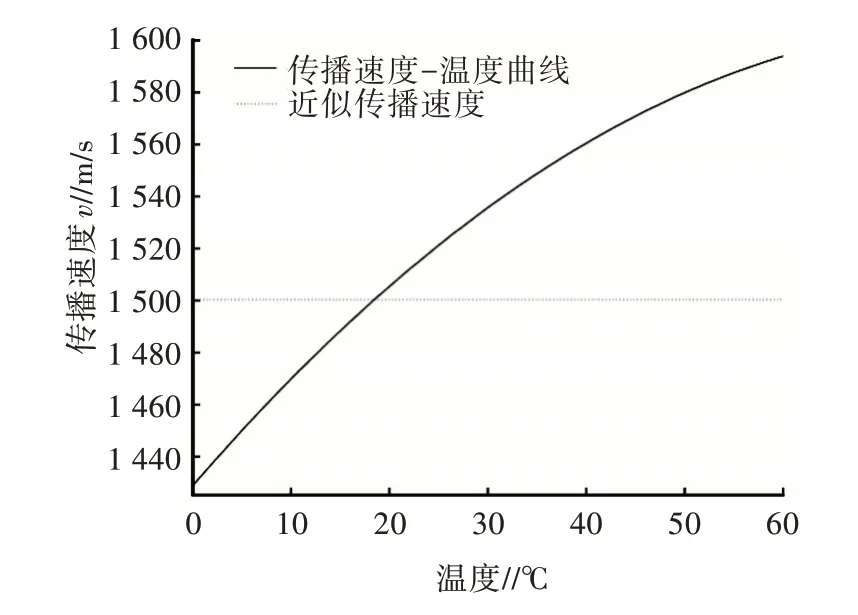
圖6 不同水溫條件下水下避障模塊測距曲線
聯立式(1)、式(2)可得到水下航行器避障裝置某一溫度下根據時間函數的測距公式。

水下機器人運動過程中會造成水下波動,有驅趕周圍生物的作用,因此漁業養殖水下機器人避障模塊主要用途在于避免水下機器人擱淺、水中異物及體積較大的水下生物,同時不會影響水生生物的生長發育。
2.2.3 定位導航模塊水下機器人工作過程中的一大難點在于水下自主航位推算。水下機器人運用捷聯式INS導航技術在水下進行定位和導航。捷聯式定位導航較平臺式INS占據的體積與空間較小,且更容易集成導航與控制于一體,通過加速度對時間的二次積分即可得到航行器位置[25]。由于衛星信號無法穿透水體傳遞至水下機器人,因此須通過線纜與水下機器人進行連接,上位機也可通過ROV線纜接收到水下機器人的姿態、速度和位置信息并顯示(圖7)。

圖7 定位導航模塊硬件電路
3 功能設計及實現
3.1 水質監測
水質監測主要包含多水域環境參數的監測,即實現水下機器人的水質檢測相關數據采集工作,包括溫度傳感器、pH傳感器、溶解氧傳感器等[26-28]。溫度傳感器由NTC熱敏電阻接橋式電路組成,精度高、電路簡單且靈敏度強;pH傳感器采用RMD-IS?DC2M12型pH傳感器,適用于全pH范圍區間,補償溫度-20~130℃,測量精度為±0.01℃,響應時間短;溶解氧傳感器采用HQ30d哈希便攜式溶氧儀,測量范圍為0~20 mg/L,測量精度為0.01 mg/L。通過各傳感器采集得到的數據為模擬數據,將模擬數據運送至A/D轉換模塊后輸出至主控制器,由單片機完成數字量的采集與接續控制。為避免溫度對試驗測得參數的影響,外接溫度補償電路部分可對pH及溶解氧相關參數值進行校正。
水質監測包含以下3個步驟。①進入初始化操作,水下機器人系統所有操作清零。②主控制器發送采集命令至各水質監測相關傳感器模塊。③接收到主控制器發送命令時,各傳感器檢測相關水質數據并傳輸到主控制器模塊,未接收到命令時保持休眠狀態;通過LabVIEW搭建的上位機平臺可觀測并記錄水質數據,如圖8所示。
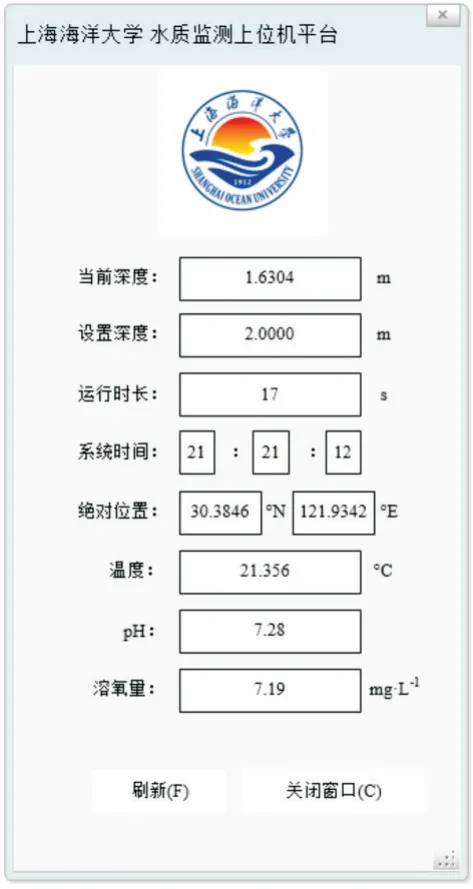
圖8 遠程監控上位機平臺
3.2 水質改善
漁業養殖過程中通過pH調節、溶氧量調節等手段對養殖環境加以改善。水下機器人工作過程中對蠕動泵、電機轉速加以控制,以實現水質改善功能[29,30]。
當主控制器得到水質相關數據參數超出上下閾值范圍,輸出相應的控制信號,控制對應水質改善模塊的執行。水下機器人存液管中可存放一定量(約1 000 mL)的改善液,一般為石灰漿或氯化鉀溶液,用以中和養殖塘內pH,以達到養殖生物的需要。
水下機器人的另一改善功能在于對溶氧量進行調節,設置工作水深為0,水下機器人工作與水面電機帶動螺旋推進器運轉的過程中,對局部溶氧量進行調節,帶動空氣中的氧氣溶解于水中,從而起到良好的溶氧量調節效果。
4 試驗測試
4.1 運動測試
完成水下機器人的硬件搭建并進行調試,將初代水下機器人裝置置于校園某湖泊內進行運動測試試驗,運動測試實際試驗過程如圖9所示。
圖9 水下機器人運動測試
設定航行深度為2 m時,根據上位機平臺記錄下水下機器人的運動軌跡如圖10所示,水下機器人的運動過程可分解為開始下潛、下潛過程和到達指定深度三段。開始下潛過程依托舵機控制螺旋推進器產生向下的推力實現;下潛過程較快,上述步驟的螺旋推進器持續保持在相應角度并產生向下推力;到達指定深度附近,再次通過舵機調整螺旋推進器角度水平,推進接近巡航終點并控制其水平運動。整體運動狀況在X-Y向投影大致為直線,與預期軌跡一致,微小擾動受定位系統精度影響可忽略。
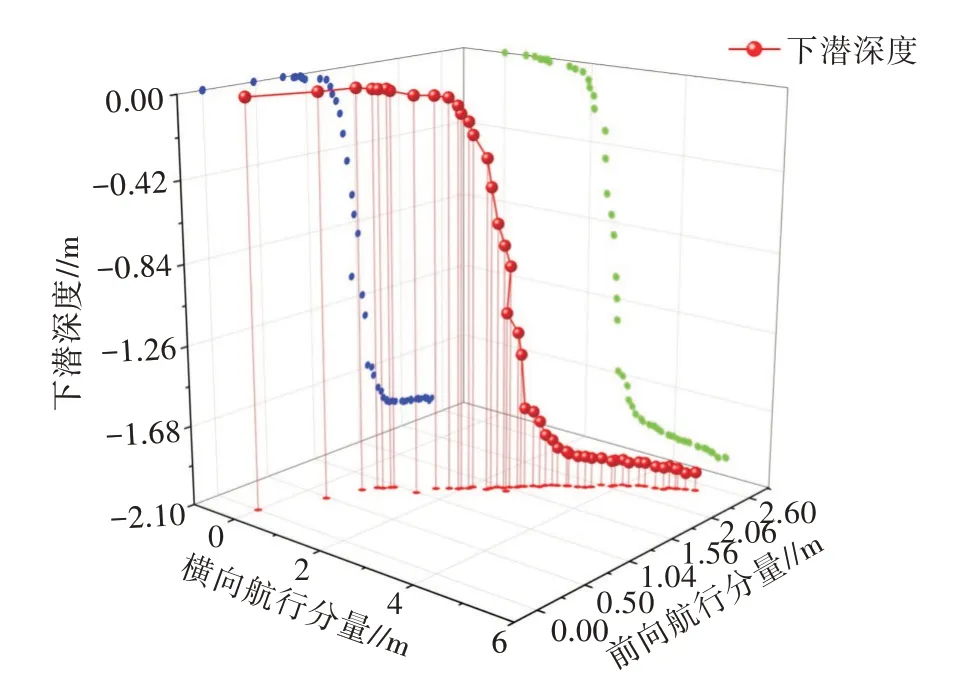
圖10 運動軌跡記錄
4.2 水質數據采集試驗
為驗證水下機器人能否在漁業養殖環境中完成水質監測功能,應在同一片水域中放置水下機器人,完成3次不同深度的相同水平路徑航行,經過相應點位時在上位機平臺上讀取相應數據。在上述相同養殖水域中,測試時間為夜晚23:00至次日凌晨1:00,天氣為陰雨天。采用有纜通訊的方式回傳數據,預設深度值為0 m(水面)、1.0 m(靜水層)和2.0 m(接近水底)時,考察某水域溫度、pH及溶氧量指標時獲取的數據如表2所示。
由表2可知,從不同深度條件下各采樣點的水質參數可以看出該養殖水體呈堿性。由于測量時間及天氣影響,其監測參數與理想狀況存在一定差異,通過求取平均值可得到表3所示該養殖水域整體數據,試驗結果能反映出不同采樣點及不同水深環境下的水質參數。

表2 水質監測采樣數據
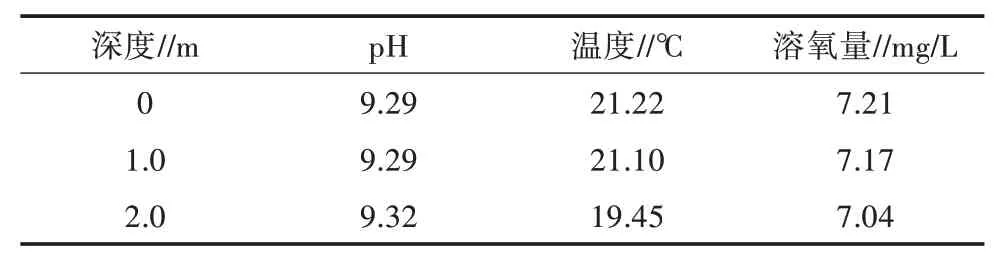
表3 水域水質分層監測結果
4.3 水質定向改善試驗
從pH與溶氧量2項參數改善切入,為驗證水下機器人調節養殖環境水質參數較傳統調節方式的優越性及水質監測與水質改善的聯動作用,選擇上述水域外加一處自行配置的酸性水池,持續監測pH和溶氧量的變化。
試驗時間及氣象條件同上。人工經驗調節pH與漁業養殖水下機器人在水域環境中自動調節效果對比如圖11所示。水下機器人的自動調節方式較人工調節的優勢在于,水下機器人能夠根據水質監測的pH實時釋放調節所需的石灰漿及氯化鉀溶液質量,并通過水下機器人的運動進行自動攪拌,增強了pH調節的效率。
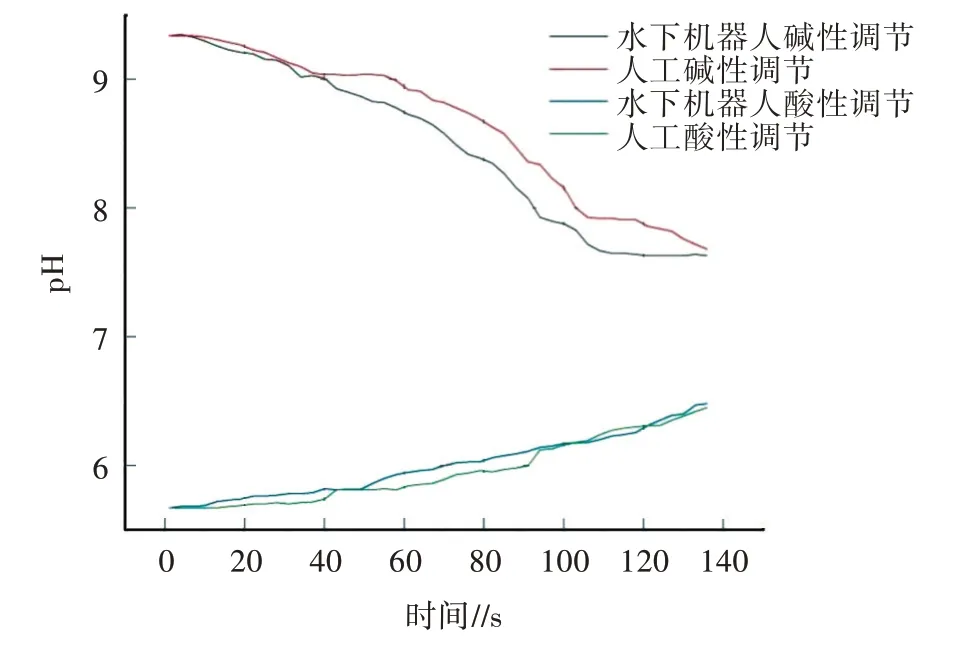
圖11 水下機器人調節局部水環境pH抽樣分析
在溶氧量調節試驗中,通過單臺水下機器人與單臺420 W增氧機的實際效果對比,分析水下機器人在溶氧量調節方面的作用。測試結果如圖12所示,由于增氧機僅能從固定位置輸送氧氣,因此其增氧效果較為平穩;水下機器人通過螺旋推進器作用促使水域“換氣”,效果優于增氧機。
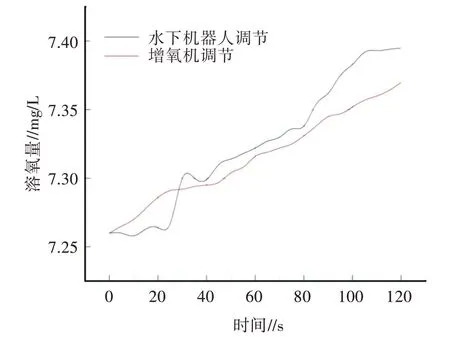
圖12 水下機器人與增氧機溶氧量調節效果對比
傳統方式的水質調控依賴人工經驗完成,水下機器人通過自動pH調控、溶氧量調節,依附于其自主巡航功能可在各中小型漁業養殖池塘內完成作業,無需人為進入池塘進行水質調控,實現了安全性與高效性的統一[31-33]。
5 小結
漁業養殖過程與水質監測和水質改善密不可分,針對當前漁業養殖中常用的系列設備進行改進融合,達成了水質監測與水質改善兩個過程的單一載體實現。既解決了漁業養殖過程中無法保證定點定深度且全天候動態監測的問題,又在相關參數與理想值出現偏差的情況下通過相關裝置加以局部改進。最終證明在中小型養殖水域內該裝置具有很強的實用性,動力學模型保證了水下機器人運動和控制的可靠性。針對中小型水域的運動、監測及水質改善實踐,證明水下航行器在全水深工作和持續動態監測上優于無人船、浮標等相關裝置,并將漁業水質監測和水質改善兩個問題通過同一載體解決。后續在姿態控制問題上將繼續開展相關算法和硬件電路研究工作,結合INS捷聯慣性導航和衛星定位模塊展開更精準的定位。水下機器人用于水質監測和水質改善的裝置也拓展了水下機器人的用途,以高效的方式解決了漁業養殖過程中的相關難題。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
小星星·閱讀100分(低年級)(2022年6期)2022-08-22 02:33:40
供水技術(2021年3期)2021-08-13 09:08:34
建材發展導向(2019年10期)2019-08-24 06:25:02
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
電子制作(2018年14期)2018-08-21 01:38:16
水利規劃與設計(2018年1期)2018-01-31 01:53:53
水利規劃與設計(2016年7期)2016-02-28 15:06:27
世界文學評論(2014年2期)2014-04-12 06:23:43
