基于MOPSO 算法的工業機器人運行軌跡優化
2022-12-28 07:52:34劉雙龍金曉怡王安然奚鷹
農業裝備與車輛工程 2022年12期
關鍵詞:優化
劉雙龍,金曉怡,王安然,奚鷹
(1.201620 上海市 上海工程技術大學 機械與汽車工程學院;2.201804 上海市 同濟大學 機械與能源工程學院 )
0 引言
工業機器人的末端執行器是機器人的一個重要組成部分,它通過直接抓取部件工作,其運動軌跡直接關系到工件的加工質量。通過算法優化末端執行器的運動軌跡,可以減少工作時間,簡化工作過程,減少能量消耗,減少工作過程中的沖擊。
依據算法中優化目標個數的差異,優化算法可以分為單目標優化和多目標優化。在優化單個目標時,時間通常作為優化目標,這樣就能得到一個軌跡,使機器人用最短的時間工作。付榮等[1]為了獲得運行軌跡,利用3-5-3 多項式插值得到關節軌跡方程,然后利用粒子群優化算法(PSO)進行時間最優的軌跡優化,最后證明在運行時間和平穩性方面,這種算法能得到比通常的3-5-3 多項式插值更好的結果。
對于單目標優化問題,利用粒子群算法可以快速高效地解決,但在多目標優化問題中,往往某一特定目標函數的最優解對其他目標函數來說并不一定合適,故需要引入Pareto 最優解集對解進行篩選得到非劣解集[2],并引入自適應網格對非支配解集的粒子引導更新,確保粒子的多樣性。
本文中首先采用五次B 樣條曲線函數得到關節空間機械臂的運行軌跡曲線,然后根據多目標粒子群優化算法(MOPSO)計算簡便、參數易調等優點,利用多目標粒子群優化算法實現對上述五次B 樣條運行軌跡的多目標優化,最后通過對利用多目標粒子群算法得到優化后的各關節的運動角度、角加速度和角加加速度的運動曲線,進一步證明多目標粒子群算法對運動軌跡優化的可行性。
1 軌跡規劃
1.1 B 樣條曲線表達式
B 樣條曲線是由貝濟埃曲線(又稱貝塞爾曲線、或貝茲曲線)進一步演變得到的,該曲線不僅繼承了貝濟埃曲線的所有優點,同時也補充了貝濟埃曲線所欠缺的局部可控性[3-4]。
一般B 樣條曲線用式(1)描述:

式中:di(i=0,1,…,n)——B 樣條曲線的控制頂點;i——B 樣條曲線的控制頂點的序號;P(u)——u 時刻曲線上的型值點,特別的時刻u 要與控制頂點的序號i 一一對應。
B 樣條基函數為:
式中:k——B 樣條曲線的階數。
1.2 構造五次B 樣條曲線軌跡
在得到的五次B 樣條曲線上確定某一指定點在坐標系上的對應位置P(u),需滿足3 個基本條件:(1)確定五次B 樣條曲線的控制頂點di;(2)保證曲線的次數k 已知;(3)確定各節點的矢量U。
根據文獻[5]的五次B 樣條曲線軌跡的構造方法,可得n+5 個與n+5 控制頂點有關的方程:

式中:D=[d0,d1,…,dn,…,dn+4]T;P=[P0,P1,…,Pn,ω0,ωf,a0,af]T;An——系數矩陣,

根據式(3)可以求出曲線的控制頂點:

事實上,許多運動約束和空間約束會對加工過程產生影響,但五次B 樣條插值曲線是采用各關節運動同一運動時間,并且沒有對任何加工條件進行約束,因此我們采用多目標粒子(MOPSO)算法,并將時間最短、能量消耗最小和沖擊最少作為約束條件,來確定運動軌跡的最佳規劃,提高加工的生產效率和裝置的使用壽命。
2 多目標粒子群算法流程
多目標粒子群(MOPSO)算法由CarlosA Coello Coello 等學者提出[6],是基于單目標粒子群算法的進一步研究,將粒子群算法從單一約束問題尋優算法轉換為解決多個目標約束的智能算法。
若無法確定該顆粒的最優位置是否適于所有目標函數的最優解,多目標粒子群算法將隨機搜尋所有最優解中的粒子歷史最優解[7]。在搜尋群體的歷史最優解時,利用網格法劃分粒子的位置,依據網格中粒子密度進行審查得到一個非劣解集,之后在非劣解集中進一步審查粒子,最后對粒子進行存檔[8]。整體的多目標粒子群算法的流程如圖1 所示。
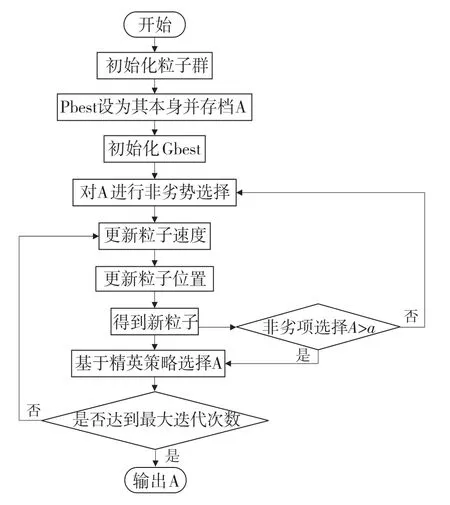
圖1 多目標粒子群流程圖Fig.1 Flow chart of multi-objective particle swarm optimization
3 適應度函數設置
3.1 優化目標函數
本文所研究軌跡優化問題的優化目標為時間最短、沖擊最小和能量消耗最少3 個目標,定義的優化目標函數為:
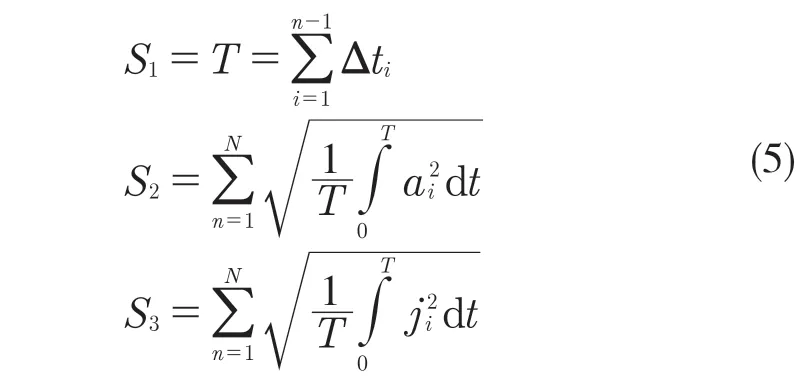
在處理多目標函數問題時,將3 個目標函數做加權求和處理,作為整體運動過程的目標函數為:

式中:Stotal——整體目標函數;S1——時間目標函數;S2——沖擊目標函數;S3——能量消耗大小;λ1,λ2,λ3——3 個分目標函數的權重。本文所研究對象對時間間隔要求較高,故確定為λ1=0.4,λ2=0.3,λ3=0.3。
3.2 約束條件函數
在實際生產加工中,不僅要考慮機器人各個關節物理位置所能達到的運動極限、驅動裝置性能限制、超負荷工作對機器人造成的不可逆傷害等,還要考慮其關節的強度極限[9],因此本文工業機器人的運動特性,如角度、加速度和加加速度,不僅要考慮裝置的最大性能極限,還要考慮關節本身的強度極限。約束情況如表1 所示。
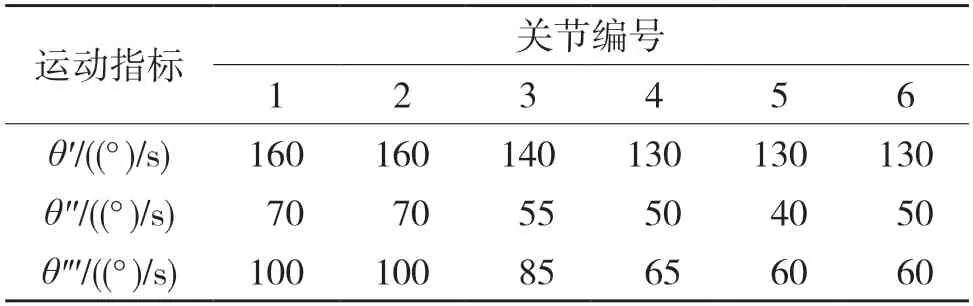
表1 機械臂各關節運動約束Tab.1 Robotic joint motion constraints of mechanical arm
工業機器人的關節i 在運動過程中存在約束條件主要有
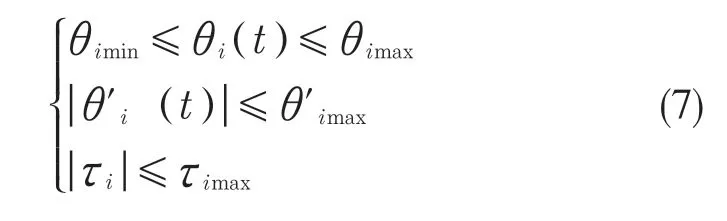
對于其中的非線性約束條件,本文利用自適應網格法進行處理,如圖2 所示。
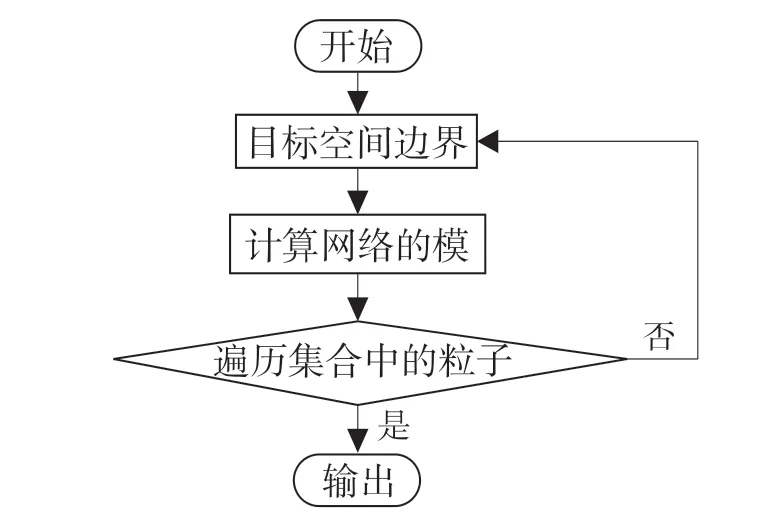
圖2 自適應網格法流程圖Fig.2 Flow chart of adaptive grid method
4 自適應學習因子設置
4.1 自適應調整權重
本文中粒子的迭代學習過程由適應加權控制,其值隨適應函數值變化。總迭代效應可以通過適應函數值控制,以避免在局部最優解出現。調整后的權重方程為:

式中:f——當前適應度值;favg——平均適應度值;fmin——最小適應度。
由式(8)可知,自適應權重的取值由當前適應度、平均適應度和最小適應度值來決定,可通過控制迭代速度,以避免局部最大或最小值出現。除此之外,通過對權重的自適應控制,可以避免發生全局最優解強,但局部最優解弱的情況;或者局部最優解強,但全局最優解弱的情況。
4.2 異步學習因子
學習因子c1負責自我認知部分,c2負責社會認知部分。c1=0 時稱為無私型算法,這導致群體多樣性的喪失,從而陷入局部最優解;c2=0 時稱為自我認識型算法,完全缺失社會認知部分,沒有社會信息的共享,算法的收斂相對緩慢。為了避免這2種情況發生,可以引入異步學習因子,限制粒子群的更新速度。異步學習因子公式為:

將本文中的各權重與學習因子代入多目標粒子群算法后得到的相應優化結果見表2,優化后的五次B 樣條插值軌跡的控制頂點見表3。
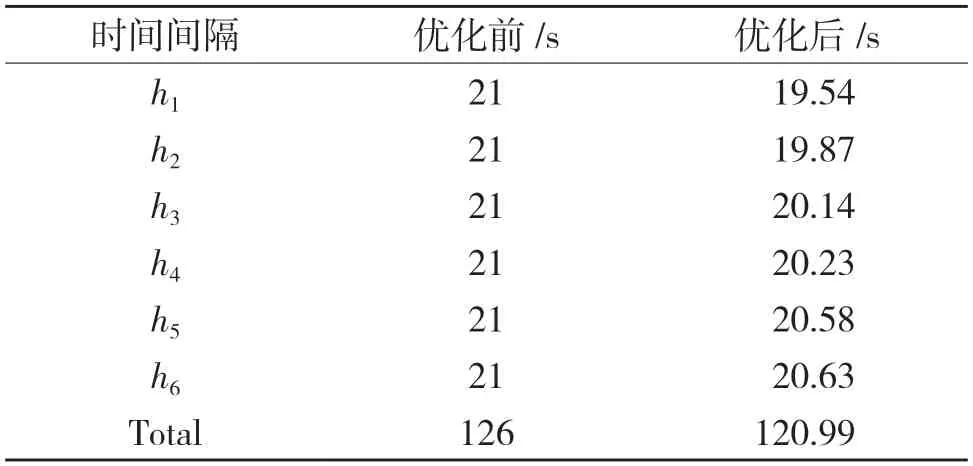
表2 MOPSO 算法尋優之后與尋優之前的時間序列對比Tab.2 Time series comparison of MOPSO algorithm before and after optimization
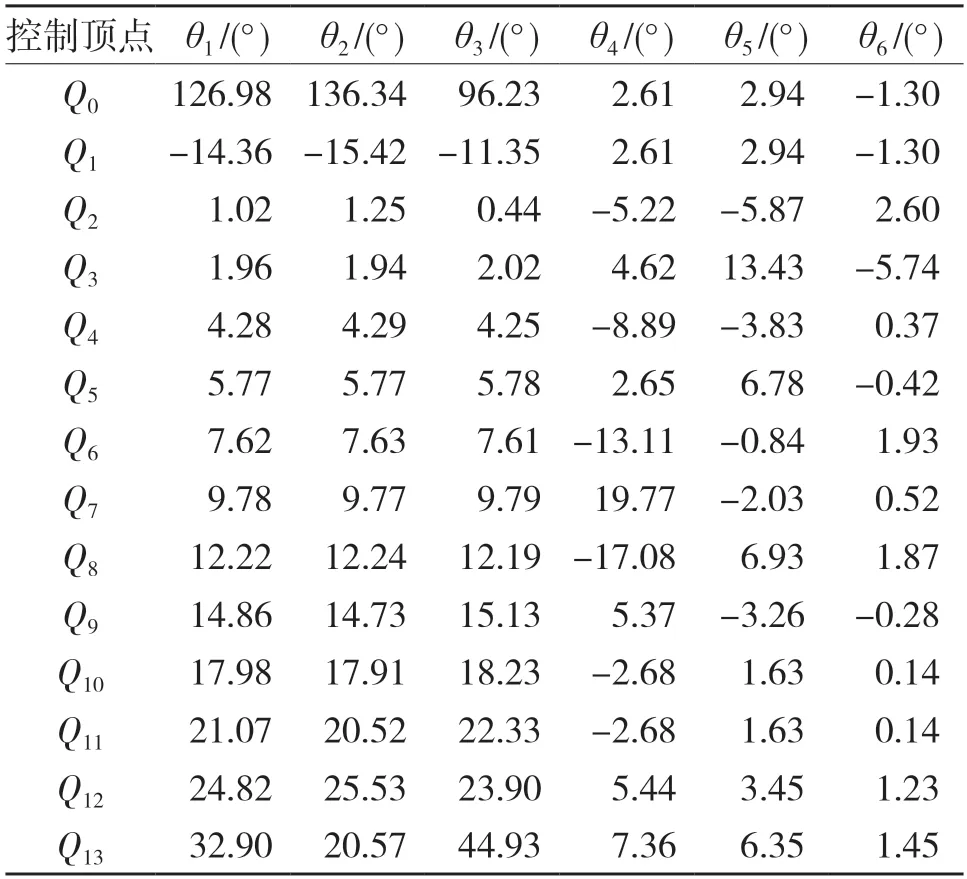
表3 MOPSO 算法尋優之后的控制頂點Tab.3 Control points of MOPSO algorithm after optimization
由粒子群算法得到新的運行控制點,代入MATLAB 軟件進行五次B 樣條曲線的繪制,得到新的機器人在指定末端位置和初始位置情況下的各關節的運動特征曲線,如圖3 所示。
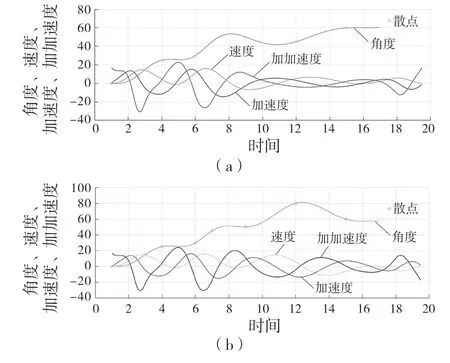
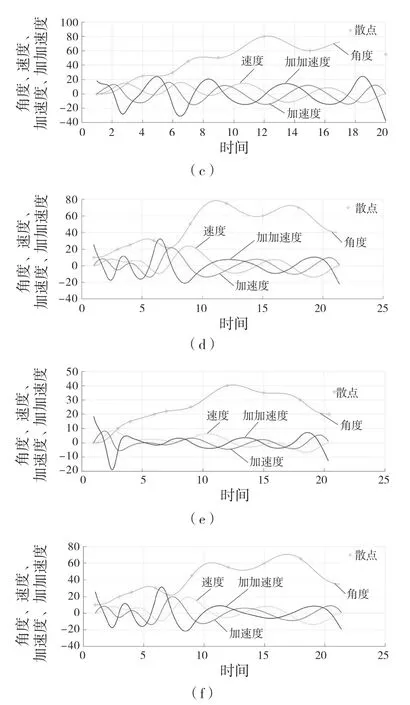
圖3 優化后的運動特性曲線Fig.3 Motion characteristic curve after optimization
利用多目標粒子群算法,以沖擊最小、運行時間最短和能量消耗最少為約束條件得出優化后的各關節運動特征曲線。分析優化后的各關節運動曲線,在各關節的運動時間限制在20 s 左右時,根據角加速度和角加速度曲線的變化趨勢可知,優化后的軌跡平穩且起伏少,可進一步證實多目標粒子群算法對工業機器人的運動曲線的優化效果。
5 結語
本文研究了多目標粒子群(MOPSO)算法原理,通過五次B 樣條曲線得到各關節的運動特征,將能量消耗最少、沖擊最小和時間最短作為多目標約束條件,采用Pareto 臨時最優邊界面和自適應網格法對約束條件進行迭代優化,并且引入自適應適應系數和異步學習因子來控制迭代速度,可以防止優化過程中的局部最優解等問題。
運用MATLAB 得到優化后的各關節的運動特征曲線和新的控制頂點以及各關節的運動時間,進一步驗證了該算法對工業機器人添加運動約束的優化可行性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45