線控轉向與主動防傾桿協同控制的仿真分析
2022-12-28 07:52:38牛振宇屈小貞
農業裝備與車輛工程 2022年12期
牛振宇,屈小貞
(121001 遼寧省 錦州市 遼寧工業大學 汽車與交通工程學院)
0 引言
在車輛主動安全技術不斷進步的同時,車輛底盤將會裝備越來越多的控制系統。車輛控制系統直接疊加,并不能最大程度發揮控制系統的功能。協同控制是在獨立子系統控制基礎上,設計上層控制器用以解決各子系統之間的相互干涉,根據車輛的行駛狀態把指令信號發送到下層各子系統控制器,從而優化車輛的綜合控制能力。
在線控轉向方面,日本熊本大學的研究團隊開發了基于線控轉向的試驗車[1-2]。殷凡青通過研究線控轉向理想傳動比的控制策略,證明該策略可以提高車輛的操縱穩定性[3]。在主動防傾桿方面,Jeon 等研究了電機式主動防傾桿系統,驗證了滑模控制算法能夠明顯改善車輛的動態性能[4]。解利臣設計的車輛防側傾控制器可以有效降低車輛的車身側傾角[5]。對于車輛協同控制的研究,Gordon等指出完全的集成控制較難實現,提出了一種折中的控制結構,即分層式協同模塊化結構[6]。周兵等研究了主動橫向穩定桿和AFS 的車輛穩定性協調控制,通過對協調控制的研究得出結論,協調控制在防側傾的同時提高了車輛的橫擺性能[7]。閆明帥通過對協同控制集成方法的研究,設計了分層結構協同控制器,有效保證了系統橫擺與側傾性能[8]。Pi Dawei 等通過對地面車輛容錯機制的主動轉向和主動防傾桿協調控制策略的研究,采用重建的模糊規則保證車輛橫擺和偏航運動性能[9]。
上述研究對提高車輛穩定性進行了深入探討,為避免子系統之間的相互影響,采用目前最廣泛認可的方法,設置協同控制器實現子系統的綜合控制。但研究的是主動轉向與主動防傾桿的協同控制,沒有考慮與最新的線控轉向系統進行協同控制,而且采用的協同控制策略也不同。本文提出采用模糊控制策略實現線控轉向與主動防傾桿的協同控制,以此來提高車輛操縱穩定性的要求。
1 整車動力學模型
建立整車動力學模型,規定以車輛質心位置為原點,汽車前進方向為x 軸正方向,駕駛員左側為y 軸正方向,車輛質心上方為z 軸正方向。建立轉向運動模型如圖1 所示,建立的側傾運動模型如圖2 所示。以此坐標系為依據,建立整車三自由度動力學模型,即側向運動、橫擺運動和側傾運動。
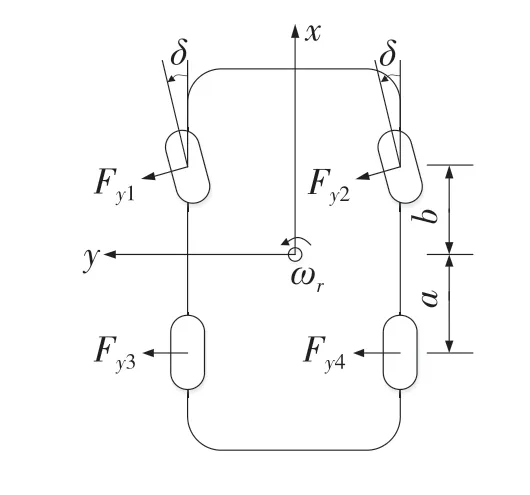
圖1 轉向運動模型Fig.1 Steering motion model
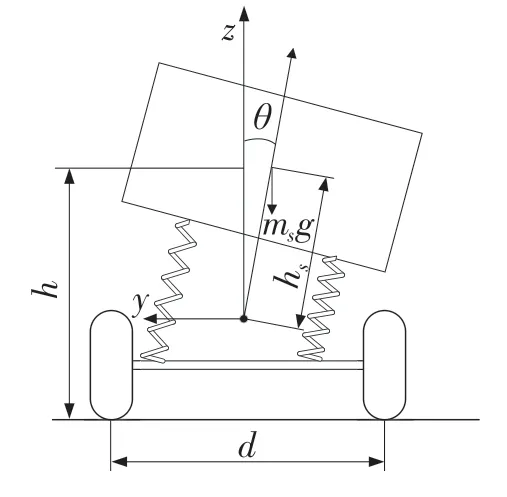
圖2 側傾運動模型Fig.2 Roll motion model
側向運動:

橫擺運動:

側傾運動:

式中:m——整車的質量;ms——車輛的簧上質量;——車輛側向加速度;vx——沿x 軸方向的車速;ωr,——車輛橫擺角速度、橫擺角加速度;h——車輛質心高度;——車身側傾角、車身側傾角速度、車身側傾角加速度;Fy1、Fy2、Fy3、Fy4——車輪所受的側向力;δ——前輪轉角;Iz——簧上質量繞z 軸的轉動慣量;Ixz——簧上質量繞x、z 軸的慣性積;a——質心到前軸距離;b——質心到后軸距離;Ix——簧上質量繞x 軸的轉動慣量;hs——質心到側傾中心的高度;Ixy——簧上質量繞x、y 軸的慣性積;g——重力加速度;K——彈簧剛度;C——阻尼系數;Uanti-roll——主動防傾桿提供的反側傾力矩。
車輛仿真的主要參數如表1 所示。
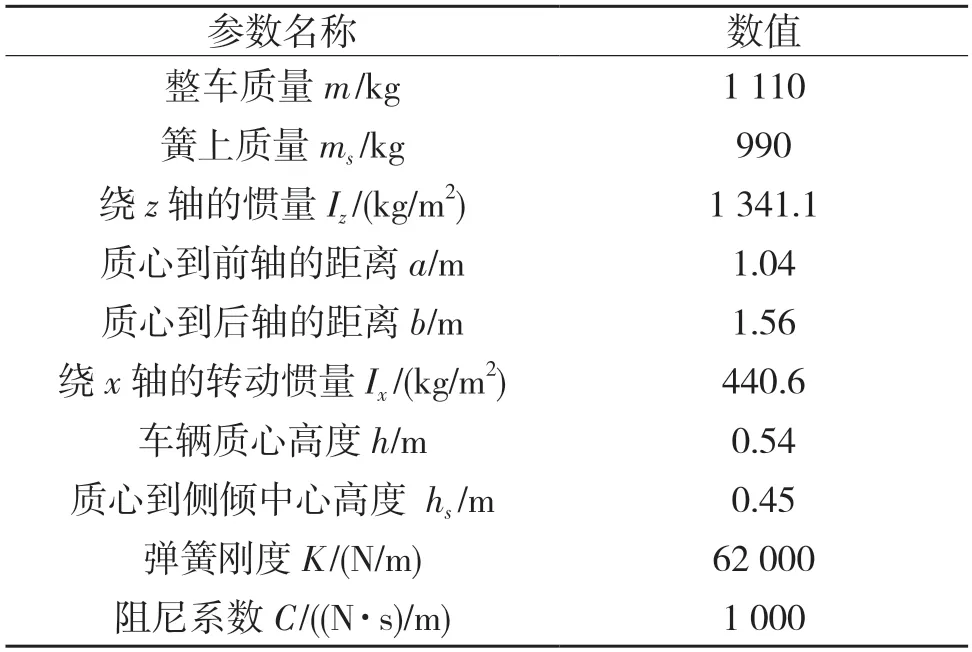
表1 整車仿真主要參數Tab.1 Main parameters of vehicle simulation
2 協同控制設計
車輛在行駛過程中,由于道路狀況的復雜性,在大角度轉向過程中,當輪胎附著力達到極限時,線控轉向通過變角傳動比改變轉向角度已經不能很好地控制車輛穩定行駛,此時通過協同控制輸出對前后主動防傾桿的力矩分配,減小前軸左右垂直載荷變化量,可增加前軸總的側向力;協同控制輸出的附加轉角,可以增加線控轉向系統的作用,提高車輛橫擺穩定性。設計的協同控制框圖如圖3 所示,采用分層式控制器,上層控制器為協同控制器,下層控制器為線控轉向控制器和主動防傾桿控制器。
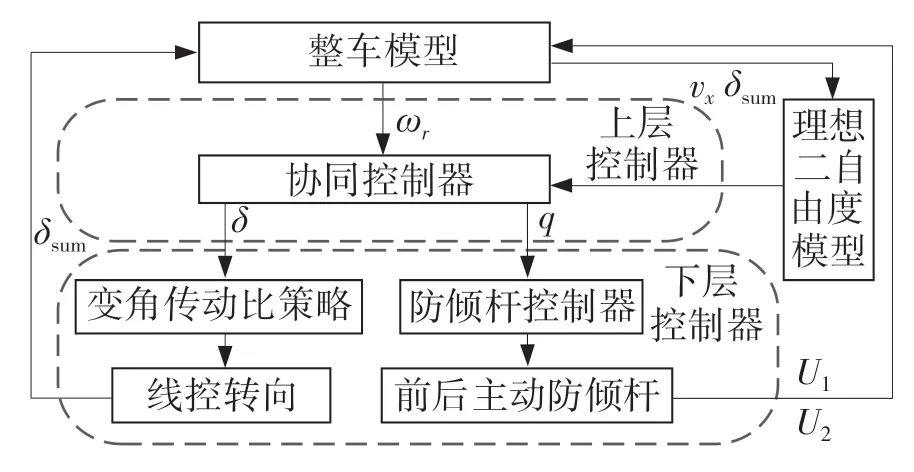
圖3 協同控制框圖Fig.3 Cooperative control block diagram
2.1 上層控制器設計
模糊控制是通過軟件模擬人類大腦思維發展出來的控制方法,使判斷更智能化。由于模糊控制策略具有自適應能力強,適合非線性系統的特性,于是本文通過設計模糊控制器,達到這2 個子系統的協同控制。
模糊規則協同控制器把理想的橫擺角速度與實際的橫擺角速度誤差e 及其變化率ec 作為輸入,輸出為附加前輪轉角δ和主動防傾桿的前后軸力矩分配系數q。其中橫擺角速度誤差e 和誤差變化率ec 的模糊子集為{NB,NM,NS,ZO,PS,PM,PB},輸出附加前輪轉角δ的模糊子集為{NB,NM,NS,ZO,PS,PM,PB},輸出前后力矩系數的模糊子集為{ZO,S,M,B,G}。采用三角函數隸屬規則,附加前輪轉角δadd和前后力矩分配系數q 的模糊控制規則表如表2 和表3 所示。
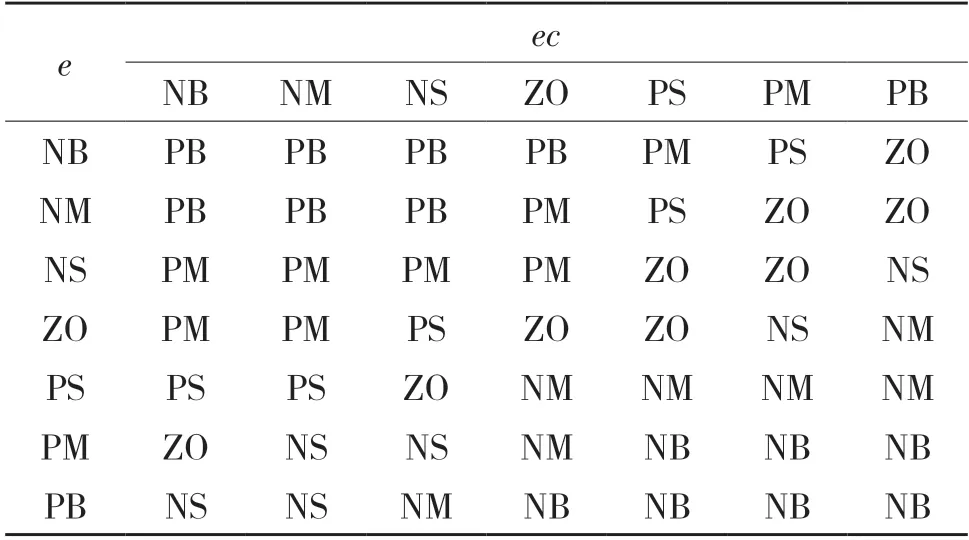
表2 δadd 模糊規則表Tab.2 δadd fuzzy rule list
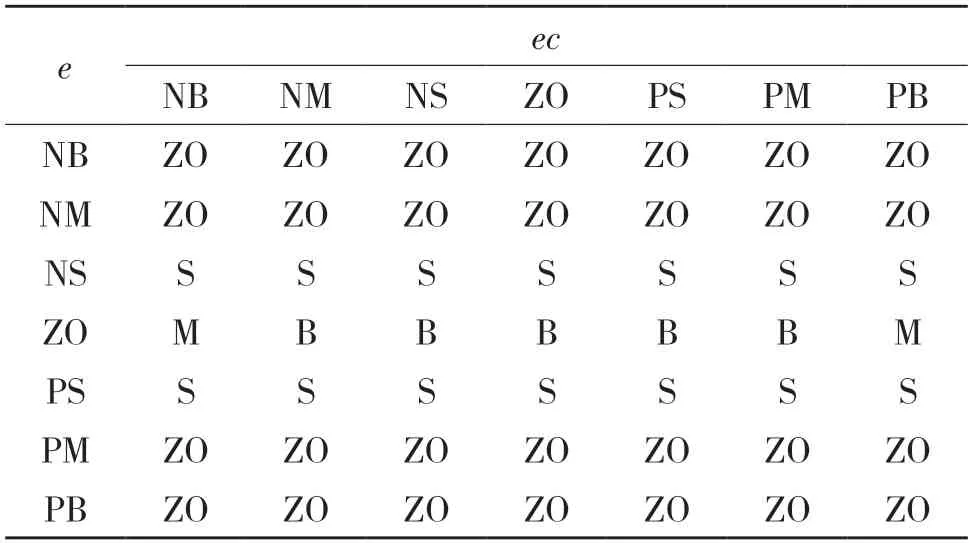
表3 q 模糊規則表Tab.3 q Fuzzy rule list
協同控制后的車輛前輪轉角為:

式中:δsum——車輛的前輪轉角;δ1——線控轉向系統輸出的前輪轉角;δ——協同控制后輸出的附加前輪轉角。
協同控制后的前軸主動防傾桿力矩:

協同控制后的后軸主動防傾桿力矩:

式中:U1——前軸主動防傾桿力矩;Uanti-roll——主動防傾桿提供的反側傾力矩;q——主動防傾桿的前后軸力矩分配系數;Sign——符號函數;ωr——橫擺角速度;U2——后軸主動防傾桿力矩。
車輛的橫擺角速度對路徑跟蹤能力和轉彎半徑的大小有很大的影響,所以在協同控制器中以車輛實際橫擺角速度與理想的橫擺角速度誤差為輸入,通過協同控制器計算前輪附加轉角,疊加到車輛的線控轉向子系統中;計算出車輛的前后主動防傾桿力矩分配系數,輸入給主動防傾桿子系統,以此為基礎對前后主動防傾桿的力矩進行調節,對提高車輛行駛穩定性很有利。
2.2 下層控制器的設計
2.2.1 線控轉向系統設計
線控轉向作為最新的轉向形式,通過變角傳動比策略,能有效改善車輛的轉向性能,使車輛更加平穩地行駛。本文的變角傳動比根據穩態橫擺角速度增益不變設計,變角傳動比設計:
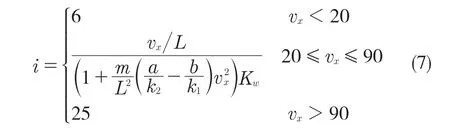
式中:vx——車速;L——軸距;m——整車質量;a——質心到前軸的距離;b——質心到后軸的距離;k1——前輪側偏剛度;k2——后輪側偏剛度;Kw——轉向靈敏度的值。
當車速小于20 km/h 時,為了提高車輛的轉向靈敏度,減少方向盤的轉向角度,將最小傳動比設為6;當車速為20~90 km/h 時,為了使車輛在不同的行駛速度下有著相同的轉向響應特性,采用根據穩態橫擺角速度增益不變而設計的變角傳動比;當車速大于90 km/h 時,為了防止車輛在轉向中方向盤過于沉重,將最大傳動比設為25。
線控轉向中的傳感器采集車輛方向盤轉角和實時車速控制框圖如圖4 表示。根據變角傳動比的設計,得到車輪的名義轉角,名義轉角會實時傳遞給整車模型,控制車輛的轉向。
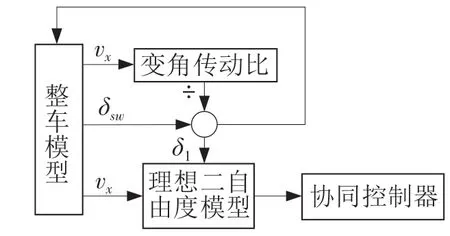
圖4 線控轉向控制框圖Fig.4 Steering-by-wire control block diagram
2.2.2 主動防傾桿系統設計
主動防傾桿分別布置在車輛的前軸和后軸,在轉向工況和兩側路面不平的道路上行駛時,通過施加在車輛左右兩側的反側傾力矩,可以有效改變車身的姿態,使車身側傾角控制在某一區間,提升車輛行駛時的安全性和乘員的舒適度。
針對主動防傾桿設計的PI-PD 控制器輸出如式(8)、式(9):
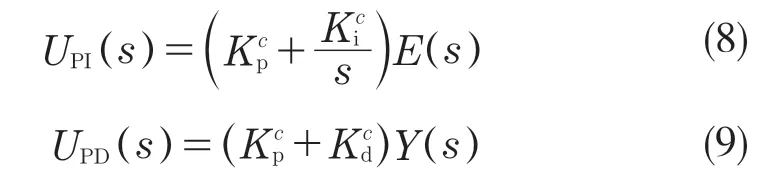
式中:UPI(s)——PI 控制器輸出;UPD(s)——PD 控制器輸出;——比例、積分和微分的模塊增益;E(s)——誤差信號;Y(s)——系統輸出。
主動防傾桿提供的側傾力矩可以有效減少車輛的側傾角,對于主動防傾桿的控制,設計的控制框圖如圖5 所示,主動防傾桿控制策略采用PI-PD的控制策略,車輛的目標側偏角與車輛實際側偏角作為偏差,通過PI-PD 控制器輸出對應的主動側傾力矩,分別施加到前后軸主動防傾桿上,實現對車輛側傾角的控制。

圖5 主動防傾桿控制系統框圖Fig.5 Block diagram of active anti-roll bar control system
3 協同控制系統仿真結果與分析
3.1 階躍工況
為了對比線控轉向和主動防傾桿協同控制與各子系統獨立控制的有效性,設置階躍工況進行驗證。設定車速為80 km/h,路況附著系數為0.85,在MATLAB/Simulink 和CarSim 的聯合仿真后得到車輛的橫擺角速度、質心側偏角和車身側傾角的仿真結果。
仿真結果表明:經過協同控制的車輛,在階躍工況下,隨著車輛側向加速度的增加,協同控制器發揮作用。車輛運行時間到1 s 時,橫擺角速度和質心側偏角的峰值小于無協同控制的車輛,如圖6和圖7 所示,當車輛繼續行駛時,車輛橫擺角速度和質心側偏角均小于無協同控制的車輛,波動幅度也相對較小,這說明經過協同控制,車輛的操縱穩定性比無協同控制的會有一定程度的提高。協同控制與無協同控制的車身側傾角都可以控制在1.25°以內,如圖8 所示,這主要是因為車身的側傾角都是2 個系統的優化目標,說明在車輛行駛過程中,車輛的行駛安全性可以得到保證。
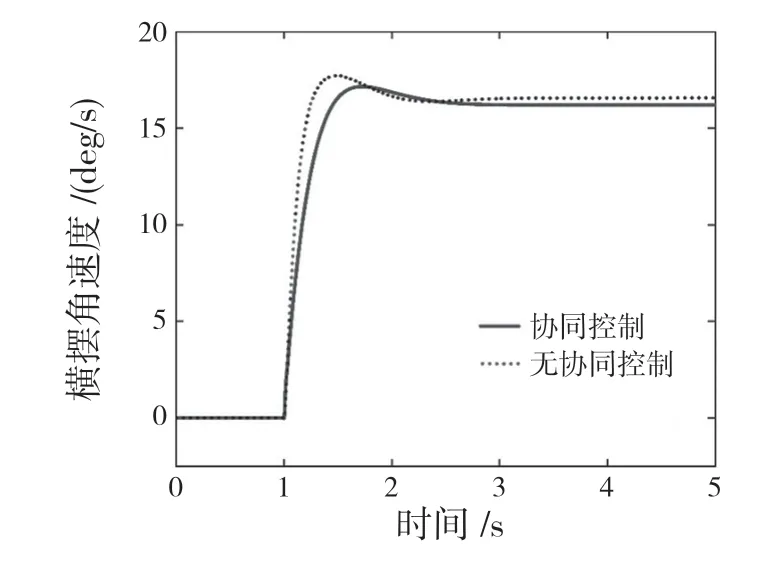
圖6 橫擺角速度Fig.6 Yaw velocity
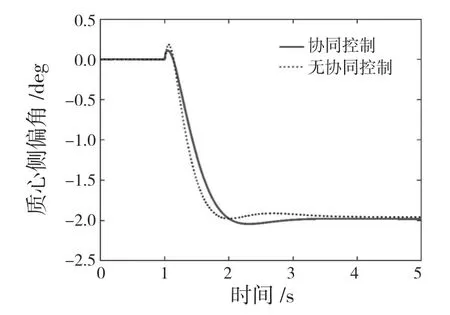
圖7 質心側偏角Fig.7 Side slip angle
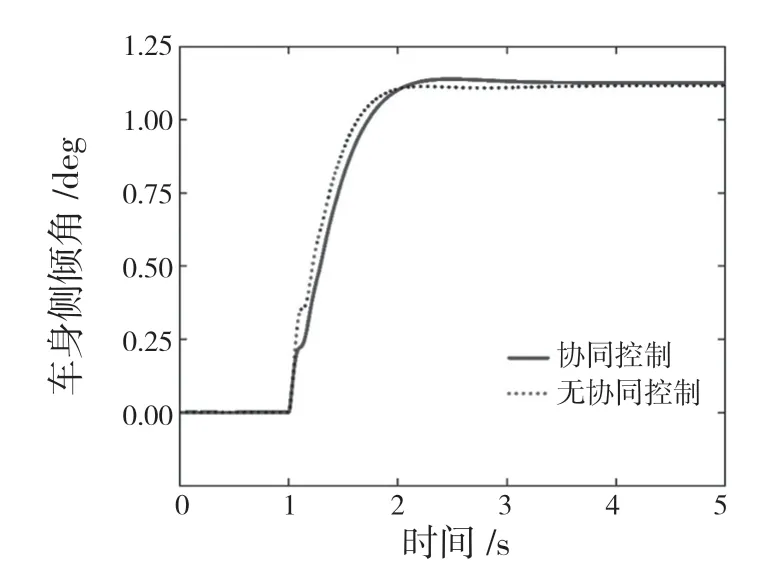
圖8 車身側傾角Fig.8 Vehicle roll angle
3.2 雙移線工況
雙移線工況可測試車輛在復雜工況行駛的操縱穩定性,為了測試設計的協同控制器的有效性,采用CarSim 自帶的雙移線試驗工況。設定的初始車速為80 km/h,路面附著系數為0.85,在MATLAB/Simulink 和CarSim 聯合仿真后得到橫擺角速度、質心側偏角和車身側傾角的仿真結果。
仿真結果表明:在雙移線工況下,隨著車輛方向盤轉角的變化,車輛橫擺角速度和質心側偏角在轉向時會發生相應變化,經過協同控制的車輛與無協同控制的車輛相比,可有效控制車輛轉向時橫擺角速度和質心側偏角的峰值,如圖9 和圖10 所示,峰值會降低1.0°~1.5°,可以降低車輛不穩定工況的出現,提高車輛的操縱穩定性。對于車身側傾角,線控轉向與主動防傾桿的協同控制與無協同控制,都可以使車輛的車身側傾角控制在1°左右。如圖11 所示,協同控制的車輛在轉向時峰值有較小幅度的減小,說明協同控制與無協同控制的車輛都可以保證車輛在行使時的車身穩定性,提高了車輛的行駛安全性和乘員的舒適性。
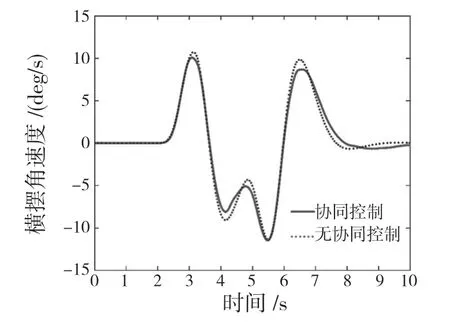
圖9 橫擺角速度Fig.9 Yaw velocity
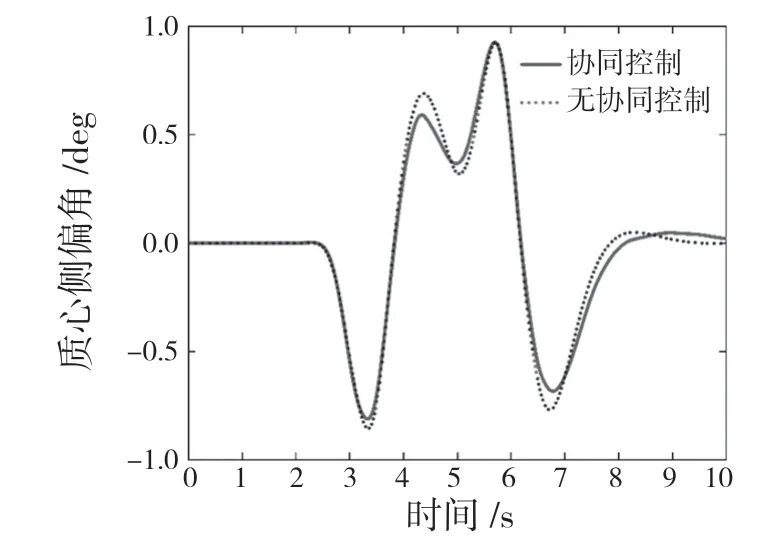
圖10 質心側偏角Fig.10 Side slip angle
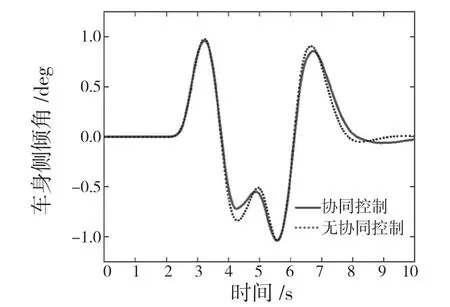
圖11 車身側傾角Fig.11 Vehicle roll angle
4 結論
(1)建立了整車三自由度動力學模型,對線控轉向和主動防傾桿協同控制策略進行了分層式設計,上層為協同控制器,下層為線控轉向與主動防傾桿子系統控制器。協同控制器采用模糊控制策略,線控轉向系統設計了變角傳動比策略,主動防傾桿系統采用PI-PD 控制策略。
(2)對建立的線控轉向與主動防傾桿協同控制模型進行階躍工況和雙移線工況的仿真試驗,仿真結果表明,線控轉向與主動防傾桿協同控制和無協同控制相比,可有效降低評價指標的峰值,控制效果優于無協同控制的車輛,通過對主動防傾桿前后力矩分配的調節,車輛也可以保持一定的不足轉向特性,車輛的操縱穩定性和行駛安全性可以得到有效的提高,證明了協同控制的有效性。
(3)對于本文中設計的模糊協同控制器,在今后的研究中,可以采用智能優化控制算法進行優化,提高控制器的控制效果。