星座碰撞規避的迭代學習構型保持方法
2023-01-03 08:16:54陶昊宸龍嘉騰朱圣英
導航定位與授時 2022年6期
關鍵詞:方法
陶昊宸,龍嘉騰,朱圣英,聶 濤
(1. 北京理工大學宇航學院,北京 100081;2. 深空自主導航與控制工信部重點實驗室,北京 100081;3. 飛行器動力學與控制教育部重點實驗室,北京 100081)
0 引言
巨型低軌衛星星座的開發,已成為當下的熱點領域,但巨型星座快速發展的同時也存在一系列問題,其中最直接的后果是造成了500~2000km范圍近地空間的異常擁擠[1-3]。隨著低軌衛星數量的急劇增加,一方面使已有在軌衛星的生存空間受到擠壓,碰撞風險增大;另一方面,發射和軌道機動等工作的負擔和風險也與日俱增,嚴重時甚至會引發碎片級聯碰撞效應等災難性后果,對空間環境造成極大破壞[4-6]。
為了保證空間目標的安全運行,碰撞規避方法的研究受到了廣泛關注[7-9]。通常碰撞規避問題可以描述為:衛星在得到預警信號與相對運動關系等信息后,如何機動降低碰撞概率。對于推力矢量控制的衛星,問題轉化為約束條件下的最優脈沖輸入的求解。R.P.Patera等[10]最早研究了相關問題,將推力方向與大小解耦,開發了一種基于碰撞概率梯度的規避策略,沿碰撞概率梯度方向進行軌道機動,使碰撞概率以最快速度下降。此后的研究基本沿著該思路展開,例如安喜彬等[11]考慮了衛星回歸原軌道、燃料最省和距離下限的約束條件,使用高斯偽譜法求解最優控制規律。袁勇等[12]采用了時間規避策略,在碰撞前施加沿速度方向的脈沖,使兩星通過軌道面交點的時刻錯開,從而避免相撞。
隨著電推進技術的飛速發展,越來越多的衛星使用連續低推力方法進行軌道控制。相比推力矢量控制,這種方法能大幅提高控制效率,從而延長衛星的使用壽命。然而,基于連續推力控制的規避方法卻鮮有研究。G.Salemme等[13]提出了一種間接方法,以燃料最省為優化目標,但模型維度較高。J.Herna-ndo-Ayuso等[14]在此基礎上,以推力最小為目標,基于Pontryagin極大化原理與間接法,分別對連續推力的幅值與方向求最優,研究了圓軌道兩星碰撞規避問題,并推導了精度較高的切向機動解析解。J.A.Reiter等[15]基于最優推力徑向假設,提出了一種半解析快速計算方法。目前,連續推力控制方式在大型低軌道互聯網星座領域已取得廣泛應用[16-17],因此本文的研究也將基于連續推力控制展開。
在星座衛星的巨大規模下,碰撞規避將成為常規任務[7]。因此,為了避免過度機動造成的次生碰撞和燃料浪費,應在盡可能減小對任務造成影響的前提下,提出更便捷的規避策略,便于衛星在軌執行。目前星座衛星的研究中,更多的是將避碰作為一項約束,討論構型保持的問題[18-19]。馮昊等[20]在設計遙感衛星空間碎片規避機動策略時,以星下點軌跡允許范圍為約束,在環形區域內實行精確控制,以達到規避效果。受星座構型保持啟發,考慮到決定兩星碰撞風險的眾多要素中,距離的影響最為重大[21-23]。本文提出了一種基于相對軌道保持的碰撞規避方法,將復雜的規避尋優問題轉化為軌道控制問題,通過精確控制減少不必要的機動,這也有益于衛星的正常任務。
相對軌道保持的核心問題在于相對攝動建模,對于近地衛星,地球形狀攝動是主要攝動源[24-25]。由于互聯網星座衛星以近圓軌道為主,容易產生碰撞風險的衛星軌道高度相當,因此運行周期也十分接近,加之地球非球形引力攝動又呈現出明顯的周期性,這就導致了相對運動模型中的復雜攝動項以周期重復為主。一般的反饋控制可以抑制非周期誤差,但并不能有效地消除周期性攝動引起的周期誤差,與理想的相對軌道始終存在偏差,控制效果不理想[26-27]。迭代學習控制(Iterative Learning Control, ILC)是一種通過重復控制軌跡修正控制律的方法,最早由S.Arimito[28]提出,用于提高機器人軌跡跟蹤精度。由于其控制輸入由先前試驗得到,不依賴于精確模型,因此被廣泛引入其他領域。
針對周期性為主的復雜相對攝動,本文提出了基于ILC的星座衛星碰撞規避與構型保持方法。首先,對地球形狀J2攝動進行建模,使用軌道模型作差的方法得到相對運動模型;其次,以相對距離為控制目標引入反饋控制,跟蹤相對軌道;在此基礎上,基于相對攝動周期構建ILC控制器,提取軌道保持偏差與控制輸入,生成下一周期的輸入,從而抵消周期性擾動的影響,提高軌道保持精度,以不同軌道傾角的圓軌道近地衛星為例進行了數值仿真。
1 動力學建模
首先定義軌道坐標系,原點O位于目標航天器或衛星的質心,Ox軸(R軸)指向目標矢徑方向,Oy軸(S軸)在軌道平面內與Ox軸垂直,指向目標速度方向,Oz(W軸)與軌道平面垂直,與Ox、Oy軸構成右手坐標系,稱為RSW坐標系。其中,W軸方向與目標比角動量h方向一致,但S軸并不一定與速度矢量重合。
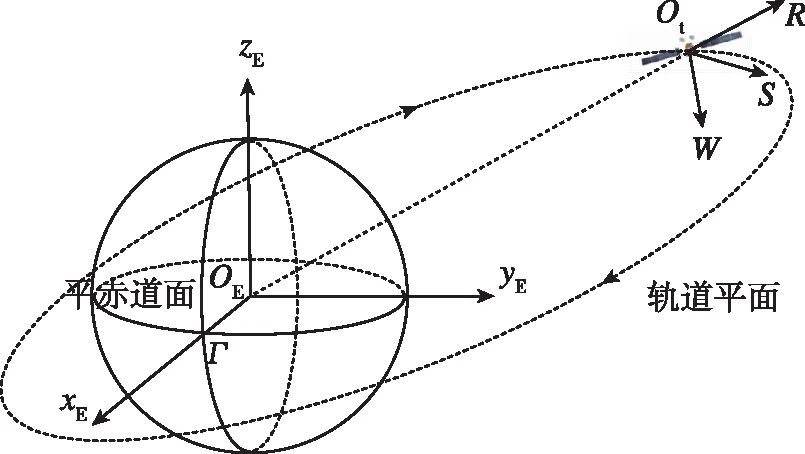
圖1 地心慣性系(ECI)與軌道坐標系(RSW)關系圖Fig.1 Relation between earth centered inertial frame and orbit frame
設威脅星在目標星RSW系中的相對位置為 (x,y,z)T,則有
(1)
式中,下標t與d分別表示目標星和威脅星;ρ為兩星相對位置矢量;f為目標星真近點角。
由于近地衛星的主要攝動源是地球扁率,因此僅顯化2階帶諧項攝動,其在地心慣性坐標系(Earth Centered Inertial,ECI)下可表示為
(2)
進行坐標轉換并代入二體運動方程,可得目標星RSW系下的相對運動方程為
(3)
式中,ap=[apx,apy,apz]T表示軌道系下的相對攝動加速度;as=[asx,asy,asz]T表示其他未建模的非周期擾動以及近似誤差;ac=[acx,acy,acz]T表示三軸的控制分量。
由于有碰撞風險的兩近圓軌道衛星軌道高度近似相等,即rt≈rd,方程可簡化為
(4)
式(4)即為衛星相對加速度描述,包含攝動的相對運動動力學模型的矩陣形式為
(5)
式中
(6)
2 星座碰撞規避的迭代學習構型保持方法
相對軌道保持首先需要選定理想的相對軌道,本文以不受攝的二體運動軌道為衛星的理想軌道,并得到理想相對軌道,以下標q表示。狀態變量為xq=[rqvq]T。
相對軌道保持的過程,實際上是通過控制輸入,消除或穩定相對距離跟蹤偏差的過程。設T為ILC控制周期,控制輸入包含兩部分——反饋項afb與ILC項aILC,總控制輸入為二者加和ac=afb+aILC。定義相對軌道保持偏差
(7)
因此,有偏差狀態變量e=[erev]T。
令合擾動ah=ap+as,由于地球形狀與太陽光壓等攝動加速度均為衛星位置矢量的函數,可用r表示擾動上界
(8)
因此,根據三角不等式,相對攝動的上界也可用相對距離矢量表示

(9)
式中
(10)
根據式(9),非周期攝動與偏差狀態矢量的模也存在如下關系
(11)
式中
(12)
2.1 反饋保持控制器設計
針對相對攝動建模誤差與未建模攝動的非周期影響,引入反饋保持控制器跟蹤理想相對軌道,并穩定軌道保持偏差。下面給出反饋保持器的增益設計方法。
衛星相對動力學模型式(5)中,相對加速度的描述為
(13)
設計反饋控制輸入afb為
(14)

(15)
容易驗證在式(14)反饋控制輸入下系統的穩定性和偏差的有界性。
2.2 ILC保持控制器設計
在2.1節中,通過引入反饋控制器,抑制了非周期攝動下相對軌道保持偏差的發散。針對主要攝動項ap,本節將設計ILC保持器,進一步抵消周期變化的保持偏差,實現穩定的相對軌道保持。
理想相對軌道加速度描述為
(16)
與式(13)相減得到偏差加速度描述
(17)
在式(17)中加入速度偏差描述式,寫成偏差狀態方程
(18)
設計ILC保持器時,控制輸入ac=aILC,式(18)可寫作
(19)
ILC保持器輸入的確定依賴于前一周期的保持偏差和ILC輸入信號,使用分段函數進行表示[29]
aILC(t)=
(20)
式中,L為ILC增益矩陣,且有
(21)
增益系數κr、κv由保持偏差決定,本文采用雙曲正切函數定義
(22)
(23)
下面判斷系統穩定性,并計算ILC保持偏差收斂半徑。
設實對稱矩陣P2正定,滿足
ATP2+P2A=-p2I6×6
(24)
式中,p2>0。以關于e的二次型函數為Lyapunov函數
V2(t)=eT(t)·P2·e(t)
(25)
兩邊求導并代入式(19),得到
(26)
代入擾動上限式(11)與ILC輸入表達式(20),得
(27)
根據當前與上一周期偏差e的關系
(28)
代入式(19)得

(29)

(30)
在一個周期內,定義最大控制輸入大小
(31)
代入式(30),并利用矩陣次可加性展開得
(32)
合并、化簡得

(33)
在式(33)中,令
(34)
則
(35)
設P2的特征值中最大者為λ2M,最小者為λ2m,則V2滿足
(36)
ζ1>0時,將式(36)代入式(35),得
(37)
求解得
(38)
再次利用式(36)關系,式(38)可進一步化為
(39)
兩邊取平方根得
(40)
在式(40)中,令
(41)
則
(42)
再令時間t→∞,有
(43)
當υ1<1時,有
(44)
式(44)表明,在ILC控制輸入式(20)的作用下,相對軌道保持偏差將收斂到0的鄰域,收斂半徑為R2c。
值得一提的是,在υ1以及R2c的表達式中并未涉及偏差初值,因此本章所設計的ILC保持器的收斂特性與初始偏差無關。這是由于式(20)在生成每個周期的控制輸入時,偏差初值都被納入考量。這種初值無關特性意味著在實際應用中,可以依約束啟動ILC保持器,相對軌道保持偏差最終都能得到有效控制。
3 數值仿真與分析
衛星星座往往采用同軌道高度、多組軌道傾角衛星組網的部署模式,因此本章將模擬此類情況開展分析研究。設存在如圖2所示的兩顆近圓軌道衛星,初始時刻軌道根數如表1所示,軌道高度非常接近,周期僅相差1.2s。
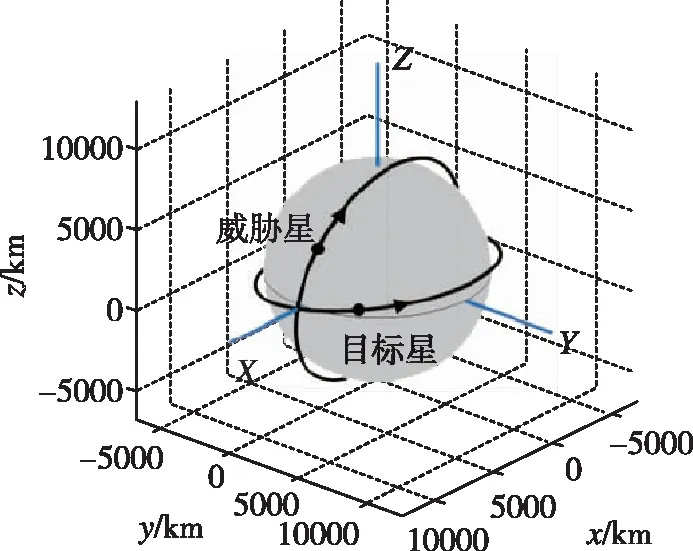
圖2 兩星理想軌道示意圖Fig.2 Ideal orbits of two satellites
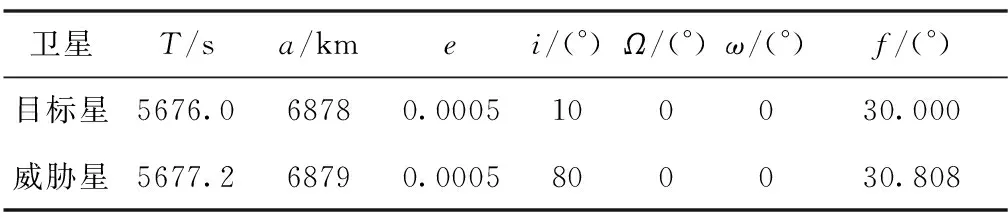
表1 兩星軌道根數
在理想情況下,目標星軌道坐標系中的相對軌道如圖3所示,類似于一個彎曲的“8”字型。但在地球形狀攝動的影響下,相對軌道會逐漸偏離理想值,如圖4所示。這種偏差是發散的,在完全不進行絕對軌道保持的情況下,2.5h后距離發散至61.395km,可能引發兩星最近距離的減小,這正是造成衛星碰撞的關鍵原因。
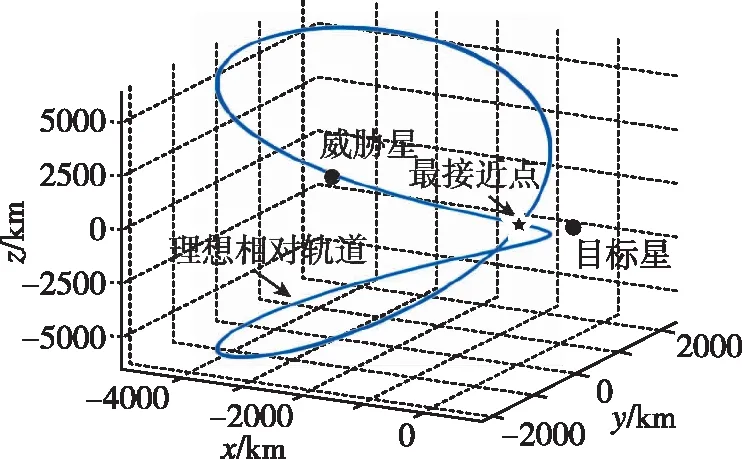
圖3 三維理想相對軌道圖Fig.3 Ideal relative orbit
(a) R向
兩星在攝動影響下的相對距離變化如圖5所示,偏差相較于相對軌道而言很小,但在8037s左右,兩星達到第二周期內的最接近時刻,此時實際相對距離ρ已降至2.069km,產生了一定的碰撞風險[30],圖6直觀地給出了兩星實際位置關系與理想情況的對比。
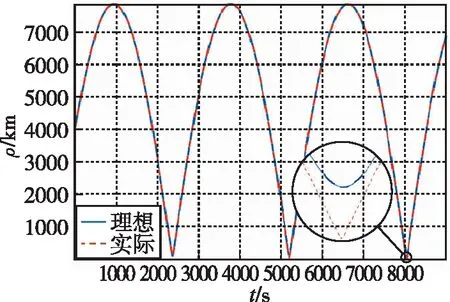
圖5 兩星距離變化曲線(2.5h)Fig.5 Change of the distance between two satellites (2.5h)

圖6 攝動影響下最接近距離變化示意圖Fig.6 Distance of closest approach under perturbation
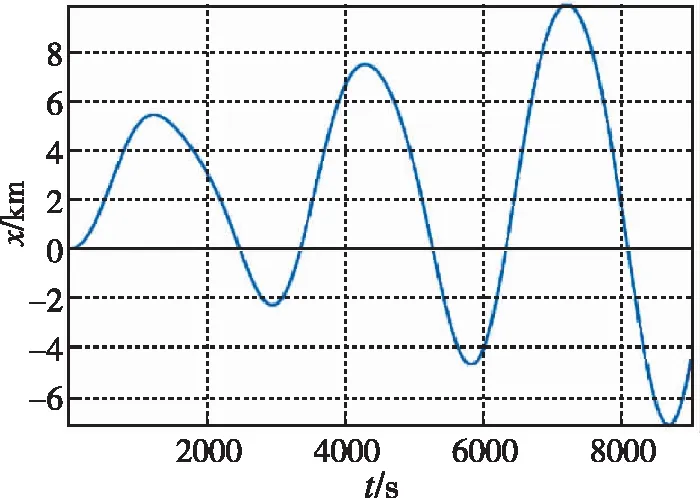
選擇ILC控制周期為相對攝動周期5676s,分別對系統施加反饋控制與ILC+反饋控制方式,圖7給出了兩星相對位置、相對速度與理想值的偏差er、ev的三軸分量變化情況。
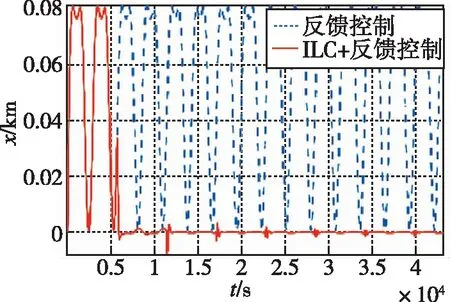
(a) R向位置
在僅有反饋控制的情況下,位置與速度偏差均會保持振蕩,其中碰撞分析更關注的是位置偏差er、er三軸分量的振幅分別達到了80.2m、34.4m和79.2m。而在ILC+反饋控制下,這種振蕩在第二周期就已經有了明顯的削弱,并在兩個周期后被基本消除。
圖8給出了位置偏差的模er的變化情況,僅反饋控制作用下,距離偏差的振幅為109.7m,使用本文提出的ILC反饋控制,三個周期后最大偏差不超過5m。同時結合圖7可知,ILC反饋控制偏差僅在新周期學習開始時快速波動,耗時約10min,而在剩下的約85min內,距離偏差er均保持在1m以內。表2給出了每個控制周期開始時的最大距離偏差。
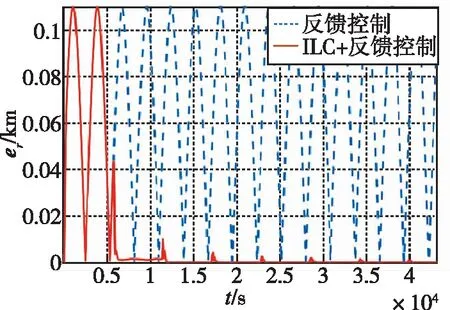
圖8 兩種控制方式距離偏差er對比圖(12h)Fig.8 Comparison of er by two control methods (12h)
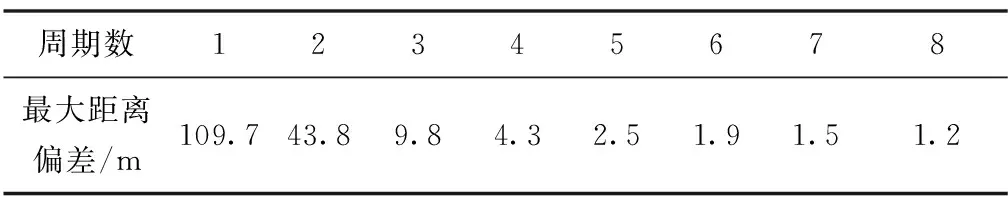
表2 ILC周期起始段最大距離偏差
圖9給出了反饋控制作用下,ILC控制器啟動時間不同時,距離偏差er的收斂情況,驗證了本章設計的ILC保持器偏差收斂性與初始條件無關的特性。因此,在實際應用中,可以根據碰撞預警信息和其他約束條件靈活選擇ILC保持器啟動時間。

(a) 不同周期
將控制輸入ac與擾動ap作差,得到輸入的跟蹤誤差
δa=ac-ap
(45)
圖10給出了δa的三軸分量變化情況,反映了兩種控制方式對擾動ap的跟蹤效果。明顯地,反饋控制無法消除周期性的跟蹤誤差,而ILC反饋控制輸入在每個控制周期開始時浮動較大,但大部分時間跟蹤能力遠勝于反饋控制。控制輸入量級與攝動項相當,因此不存在控制輸入過大、超出機動能力范圍或損壞星上設備的問題。
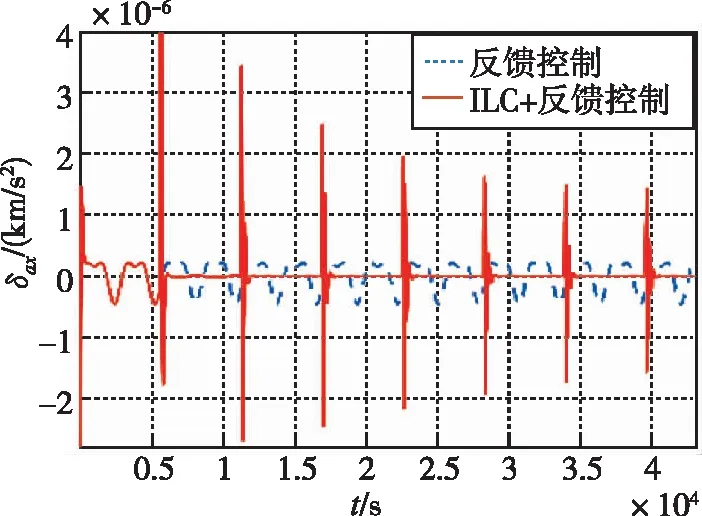
(a) R向
圖11在圖5的基礎上,添加了本文ILC反饋控制方法作用下的距離曲線。加入控制后,最接近時刻附近的實際相對距離與理想軌道基本一致,實際最接近距離大于75km,碰撞概率低于10-10,可直接排除碰撞可能,因此達到了規避碰撞的目的。
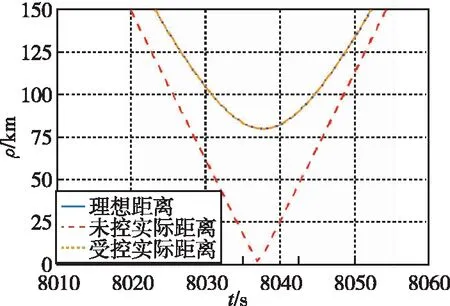
圖11 相對距離保持效果圖Fig.11 Effect of distance keeping
需要指出的是,在本例中兩星理想接近距離在75km以上,因此兩種控制方法的偏差都可保證相對距離足夠遠,不會發生碰撞。但在理想最近距離僅有數千米或更短時,相較于反饋控制百米級的精度,ILC反饋控制米級的跟蹤精度具有明顯的優勢。
4 結論
本文針對圓軌道衛星間的碰撞問題,提出了一種普遍可行的規避機動方法,選定理想相對軌道,通過高精度的構型保持降低碰撞風險。本文得到結論如下:
1)針對J2項影響為主的相對攝動變化情況,在傳統反饋控制的基礎上,通過ILC方法實現控制輸入對周期性攝動的精確跟蹤。
2)ILC控制器的收斂半徑與初始條件無關,可以依據約束條件在任意相對運動狀態下啟控,具有啟控時間靈活選擇和快速收斂的優點。
星座間的碰撞問題均可通過構型保持的方法解決,本文提出的ILC僅是對無約束圓軌道衛星的初步應用。未來,應針對具體衛星,引入具體約束,研究變周期ILC問題,并將方法推廣到橢圓軌道情形。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
