基于導航姿態解算的光纖陀螺平臺低頻角振動測試方法研究
2023-01-03 08:16:56張金云景立博
導航定位與授時 2022年6期
張金云,姜 歡,景立博,王 汀
(1.北京航天控制儀器研究所,北京 100854;2.超精密航天控制儀器技術實驗室,北京 100039)
0 引言
光纖陀螺平臺作為測量載體姿態信息和視加速度的一種新型穩定平臺系統,由光纖陀螺儀、石英加速度計、平臺臺體、支撐框架和穩定回路組成。安裝在臺體上的光纖陀螺儀敏感臺體相對慣性空間的角速度,并通過穩定回路進行位置控制,使平臺臺體穩定在慣性空間[1-2]。光纖陀螺是一種新型全固態光電慣性儀表,具有壽命長、可靠性高和空間環境適應性好等顯著優點,隨著光纖陀螺工程化應用技術的成熟和精度的提升,逐漸可以在高精度慣性穩定平臺上開展應用[3-5]。
慣導系統的動態性能直接影響慣性導航的精度和壽命,因此,慣導系統的動態性能測試技術越來越引起慣性技術界的重視。翟有新等[6]系統地分析了角振動條件對慣導系統誤差的影響,并通過穩定回路動態仿真和角振動測試,驗證了平臺角運動與穩定回路動態剛度有十分密切的關系,提出了減小平臺角振動的改進方案。周亞東等[7]對慣性平臺角振動抑制技術開展了研究,基于理論分析和仿真驗證,從六自由度角、線振動解耦著手,提出了在不改變平臺系統線振動固有頻率的情況下抑制角位移的減振方法。張志鑫等[8-9]對捷聯慣組減振系統角振動、線振動共振頻率理論開展了分析研究,通過建立捷聯慣組減振系統的動力學模型,利用剛體動力學方法分析捷聯慣組的轉動慣量和回轉半徑,得出理想情況下捷聯慣組減振系統線共振、角共振頻率存在一定的比例關系,并與減振器安裝中心到轉動中心線的平均距離和慣組回轉半徑有關的結論。陳遠才等[10-11]研究了一種基于角振動臺的捷聯慣導系統(Strapdown Inertial Navigation System, SINS)加速度計通道頻率特性測試方法,該方法基于角振動臺的正弦搖擺運動,利用加速度計的外桿臂效應實現對加速度計通道的頻率特性測試。
針對光纖陀螺慣性平臺的特點,本文提出了一種基于導航姿態解算的光纖陀螺平臺低頻角振動測試方法以提高測試精度。首先對角振動測試的基本原理進行了闡述,然后對光纖陀螺平臺低頻角振動的試驗過程進行了說明,之后對光纖陀螺平臺低頻角振動的評價計算方法進行了研究分析,最后通過試驗對該方法的科學性進行了綜合驗證。
1 角振動測試原理
光纖陀螺平臺角運動動態特性指框架角傳感器、平臺和減振支架共同的角運動傳遞特性。開展角振動試驗時,一般通過角振動臺產生往復的機械角振動,即角加速度、角速度及角位移;該角振動特性通過與其固連的光纖陀螺平臺角振動支架和平臺減振器傳遞到光纖陀螺平臺基座,帶動不同軸向平臺框架轉動機構產生角運動,通過軸端摩擦而產生軸端干擾力矩,帶動臺體繞對應軸轉動一定角度;臺體上的光纖陀螺敏感到角速度,通過平臺穩定回路控制臺體反向轉動以抵消干擾力矩,穩定臺體姿態;平臺框架轉動機構產生的相對角度,經框架角傳感器及其輸出電路完成角運動測量輸出。
光纖陀螺平臺角振動特性測試相關環節如圖1所示,通過對角運動測量輸出函數x(t)和激勵信號輸出函數y(t)的特征提取分析,可以有效評價光纖陀螺平臺的角振動特性。
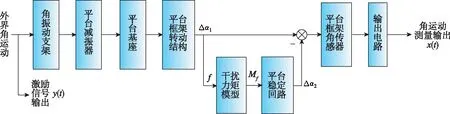
圖1 光纖陀螺平臺角振動試驗傳遞環節Fig.1 Transfer link of angular vibration experiment of fiber optic gyroscope platform
對光纖陀螺平臺角振動測試實質上是對光纖陀螺儀及穩定回路的考核。角振動試驗過程中,光纖陀螺平臺要建立慣性基準,需要將每一個坐標軸都穩定在慣性空間,而穩定回路就是用來抵御外界干擾力矩,使平臺軸保持在慣性空間。光纖陀螺平臺穩定回路控制平臺臺體隔離角運動并保持在慣性空間,基本原理是當平臺受到擾動發生偏轉時,光纖陀螺儀敏感到這個角速度信號而產生角速度輸出,該角速度信號經過一系列信號處理后產生控制信號,該控制信號驅動平臺偏轉軸上的力矩電機向相反方向轉動以平衡干擾力矩,從而使臺體可以穩定在慣性空間[12-14]。
穩定回路是光纖陀螺平臺中極其重要的組成部分。在光纖陀螺平臺角振動過程中,轉臺環架帶動平臺基座角運動時,平臺軸端會持續產生干擾力矩;通過穩定回路控制來抵消軸端干擾力矩,從而使得臺體穩定在慣性空間。因此,穩定回路是減小臺體角運動的關鍵。
光纖陀螺平臺穩定回路包括臺體、內環及外環穩定回路,內、外環需要進行信號分解,三條回路傳遞函數框圖一致,如圖2所示。

圖2 光纖陀螺平臺穩定回路框圖Fig.2 Block diagram of fiber optic gyroscope platform stable loop
圖2中,J表示平臺框架轉動慣量;Gfog(s)為光纖陀螺傳遞函數;Wc(s)為校正網絡;Kp為功率放大器增益;Wm(s)為力矩電機;N0為光纖陀螺白噪聲。
一般而言,光纖陀螺平臺穩定回路帶寬在200rad/s~350rad/s之間,低頻角振動頻率最高不超過50rad/s,遠低于穩定回路帶寬。因此,合格的光纖陀螺平臺穩定回路可以完全適應低頻角振動的動態環境。
2 低頻角振動試驗方法
試驗時選用位置角振動臺,該角振動臺包含內環、中環和外環三個轉動環,均能夠360°連續轉動,位置角振動臺通過包含光電編碼器和軸端電機的控制系統對各個環的轉位和角振動進行控制。
光纖陀螺平臺安裝時,平臺首先通過減振器安裝在角振動支架上,再通過支架安裝在角振動臺上,用螺栓予以緊固,緊固時保證支架安裝基準面與位置角振動臺的定位銷緊靠;平臺在角振動臺上安裝好后,通過轉接電纜及角振動臺滑環與電控箱連接,電控箱再通過電纜與光纖平臺地面測試系統連接;另外,電控箱與地面測試系統通信時需要通過串連轉接盒,將飛行導航時的斷調平差分信號引出并發送給角振動臺控制柜的數據采集卡用于數據同步。光纖陀螺平臺角振動測試系統組成如圖3所示。
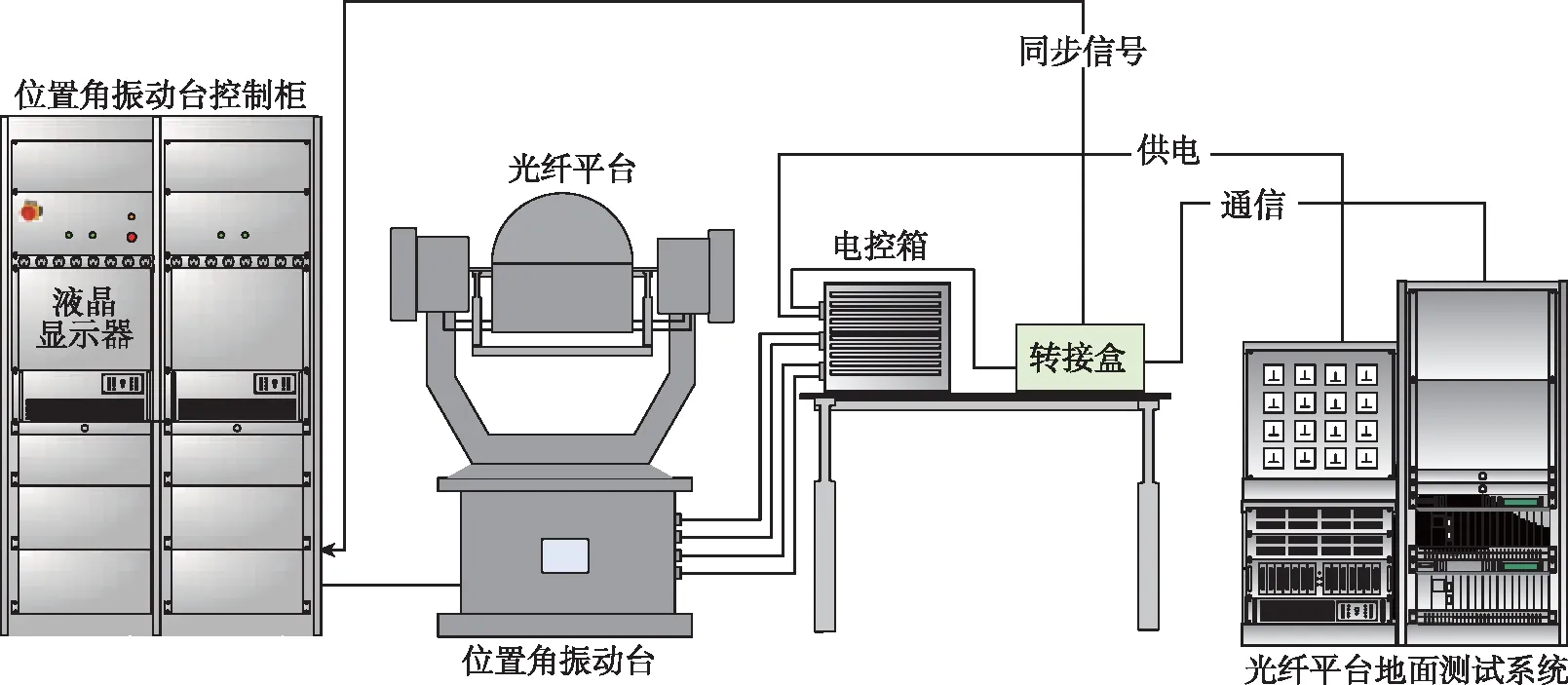
圖3 光纖陀螺平臺角振動測試系統Fig.3 Angular vibration test system of fiber optic gyroscope platform
光纖陀螺平臺角振動測試系統組建好后開展試驗,依次開展光纖陀螺平臺Y軸(對應角振動臺外環)、X軸(對應角振動臺中環)和Z軸(對應角振動臺內環)的低頻角振動試驗。光纖陀螺平臺三軸角振動試驗流程相同,以平臺Y軸低頻角振動試驗的一個試驗工況為例進行說明,試驗流程如圖4所示。
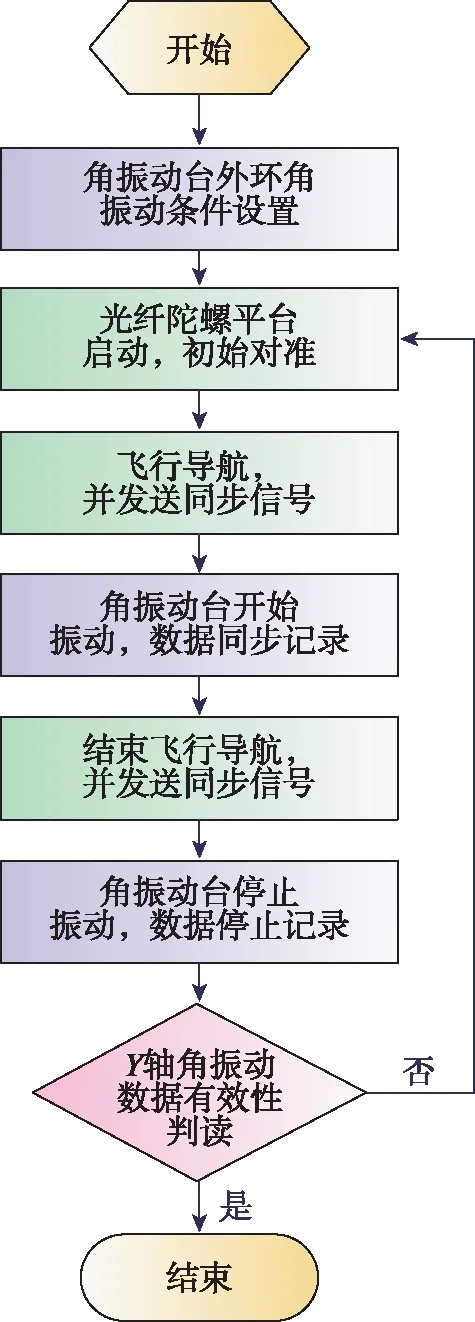
圖4 光纖陀螺平臺Y軸低頻角振動試驗流程圖Fig.4 Angular vibration experimental flow chart of fiber optic gyroscope platform
角振動臺外環按照角振動試驗工況進行參數設置,光纖陀螺平臺通過地面測試系統完成順序啟動后鎖零,首先進行初始對準,完成后進行飛行導航測試;切換為飛行導航狀態時,光纖平臺會發送斷調平差分信號,通過轉接盒將該同步信號發送至角振動臺控制計算機;角振動臺控制計算機收到高電平后,角振動臺外環同步開始角振動,同時角運動數據按照100Hz的采樣頻率進行后臺存儲;角振動試驗完成時,通過光纖平臺地面測試系統發送解除斷調平指令,同步信號變為低電平,角振動臺控制計算機收到該指令后停止數據記錄,隨后光纖陀螺平臺結束飛行導航狀態,該工況的角振動試驗結束;之后對采集的光纖平臺框架角數據和角振動臺數據進行分析判讀,確保數據的有效性和真實性。該工況完成后繼續調整角振動試驗條件,依次完成后續工況下的低頻角振動試驗。
3 低頻角振動評價方法
為準確評價光纖陀螺平臺低頻角振動測試方法,需要對轉臺環架輸出數據y(t)和平臺框架角測量數據x(t)進行分析,以得到光纖陀螺平臺角振動特性傳遞關系。通常對平臺框架角測量數據x(t)的分析方法有兩種:一種是直接對框架角曲線進行數據擬合,去除長期性趨勢后提取其周期振動特征;另一種是對框架角曲線進行帶通濾波,以得到其振動特性。
采用第一種方法分析時,由于光纖陀螺平臺框架角漂移疊加了地速和陀螺漂移兩方面的影響因素,角振動時間長時框架角曲線非線性特征顯著,會對振動特征提取產生影響;采用第二種方法分析時,框架角數據經過帶通濾波器后相位會產生一定延遲及變形,會對與角振動臺數據的時間同步性產生影響。
綜合考慮光纖陀螺平臺工作模式及誤差特性,為克服上述方法缺點,采用導航姿態解算方法得到光纖陀螺平臺基座系相對于地理系的姿態,進而再對光纖陀螺平臺穩定回路幅相特性進行分析,實現對其低頻角振動特性的綜合評價。
3.1 導航姿態解算
光纖陀螺平臺系統導航是基于空間穩定的導航過程,空間穩定狀態時平臺臺體穩定在慣性空間,陀螺不施加指令角速度,使得平臺上的陀螺工作在自由狀態[15]。選擇“北天東”地理坐標系作為導航解算的參考坐標系,記為n,并且定義地球坐標系e、平臺臺體系p和平臺基座系b。
導航解算方程可寫為[16-17]
(1)



(2)
(3)
設平臺臺體在“北天東”地理系中的方位角、俯仰角和橫滾角分別為ψ、θ和γ,這3個角的初值由初始對準獲得,后續結果通過導航姿態解算得到,可表示為
(4)
設平臺基座在“北天東”地理系中的方位角、俯仰角和橫滾角分別為ψb、θb和γb,則

(5)
同時令
(6)
解算可得平臺基座在地理系中的3個角
(7)
通過上述解算過程得到的γb、θb和ψb這3個角即為平臺基座角度信號,可分別代替平臺框架角測量數據x(t),用于后續幅相特性分析計算。
3.2 穩定回路幅相特性分析
外界激勵角運動信號作用在光纖陀螺平臺基座上引起平臺框架轉動,由于軸端摩擦產生干擾力矩,引起臺體的相對轉動;光纖陀螺會敏感到轉動激勵信號,在穩定回路的作用下臺體可以保持穩定,而平臺各框架角表現出受激波動;根據角振動臺環架數據和疊加對應激勵信號后的平臺框架角,利用基于相關關系的幅相解算方法可得到穩定回路幅相特性。
設平臺基座角度信號為x(t),角振動臺激勵角度信號為y(t)。這兩個同頻異相的隨機信號表示如下
x(t)=Asin(ωt+θ+φ)+Nx(t)
y(t)=Bsin(ωt+θ)+Ny(t)
(8)

穩定回路幅相解算可以采用平穩隨機信號的相關計算法,相關函數描述了某一時刻t瞬時值與另一時刻t+τ瞬時值的依賴關系,在使用相關計算法時,信號應為平穩信號,因此需要對式(8)中的兩個信號進行平穩性分析。
對于平臺基座角度信號x(t)求期望
E[x(t)]=E[Asin(ωt+θ+φ)+Nx(t)]
(9)
E[x(t)]=E[Asin(ωt+θ+φ)]+E[Nx(t)]
(10)
(11)
其自相關函數為二階矩運算
Rx(t,t+τ)=E[x(t)x(t+τ)]
(12)
即
Rx(t,t+τ)=E{[Asin(ωt+θ+φ)+Nx(t)]·
[Asin(ω(t+τ)+θ+φ)+
Nx(t+τ)]}
(13)
將式(13)展開
Rx(t,t+τ)=E[A2sin(ωt+θ+φ)sin(ω(t+τ)+
θ+φ)]+E[Nx(t+τ)Asin(ωt+
θ+φ)]+E[Nx(t)Asin(ω(t+τ)+
θ+φ)]+E[Nx(t)Nx(t+τ)]
(14)
x(t)信號中噪聲部分與三角函數部分相互獨立,因此式(14)中第二項和第三項均為0,得到
Rx(t,t+τ)=E[A2sin(ωt+θ+φ)sin(ω(t+τ)+
θ+φ)]+E[Nx(t)Nx(t+τ)]
(15)
Rx(t,t+τ)=
RNx(τ)
(16)
(17)
可以看到,平臺基座角度信號x(t)均值為0、自相關函數只與其采樣時間間隔有關,因此符合寬平穩條件,式(17)可表示為
(18)
同理,對于角振動臺激勵角度信號為y(t),同樣滿足
(19)
對于平臺基座角度信號x(t)和角振動臺激勵角度信號為y(t)的互相關函數
Rxy(t,t+τ)=E[x(t)y(t+τ)]
(20)
即
Rxy(t,t+τ)=E{[Asin(ωt+θ+φ)+Nx(t)]·
[Bsin(ω(t+τ)+θ)+
Ny(t+τ)]}
(21)
將式(21)展開,由于噪聲部分與三角函數部分相互獨立,且Nx(t)和Ny(t+τ)獨立同分布,因此有
Rxy(t,t+τ)=E[ABsin(ωt+θ+φ)·
sin(ω(t+τ)+θ)]
(22)
Rxy(t,t+τ)=AB·
(23)
最終可得
(24)
求解光纖陀螺平臺穩定回路幅相特性,當τ=0時,代入式(18)、式(19)和式(24)分別可得
(25)
(26)
(27)
因此,穩定回路幅值和相位分別為
(28)
(29)

4 低頻角振動試驗數據分析
上述基于導航姿態解算的光纖陀螺平臺低頻角振動測試方法,針對光纖陀螺平臺每個軸向分別開展了四種試驗工況的試驗,低頻角振動頻率分別為1rad/s、10rad/s、20rad/s和30rad/s,幅值均為0.15°。光纖陀螺平臺不同試驗工況下三軸低頻角振動時的幅值和相位特性如圖5所示。
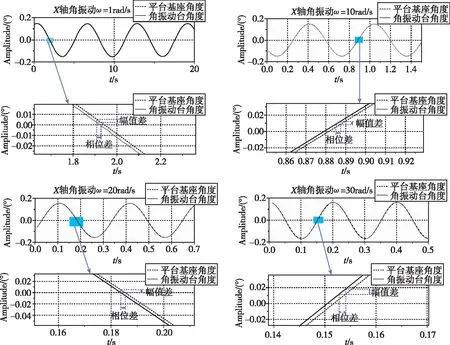
(a) X軸角振動
圖5中虛線表示平臺基座角度信號x(t),實線表示角振動臺激勵角度信號y(t),不同角振動頻率均選擇2~3個周期進行顯示。當光纖陀螺平臺X軸角振動時,平臺基座角度為橫滾角γb;當光纖陀螺平臺Y軸角振動時,平臺基座角度為方位角ψb;當光纖陀螺平臺Z軸角振動時,平臺基座角度為俯仰角θb。
通過局部放大視圖能夠明顯看到,平臺基座角度x(t)和角振動臺角度y(t)曲線幅值及相位的差異。不同角振動頻率下光纖陀螺平臺3個軸穩定回路幅值和相位計算結果如表1所示。
由表1可見,對于四種試驗工況的光纖陀螺平臺三軸低頻角振動試驗,基于導航姿態解算得到的光纖陀螺平臺穩定回路幅相裕度均滿足低頻角振動設計要求指標,表明平臺穩定回路能夠有效隔離低頻角運動,并且動態性能完全可以適應低頻角動態環境。
5 結論
基于導航姿態解算的光纖陀螺平臺低頻角振動測試方法,通過飛行導航過程中的斷調平差分信號實現角振動激勵信號與平臺框架信號的時間同步,基于慣性平臺導航解算和坐標投影轉換得到平臺基座相對于地理系的準確姿態,并結合穩定回路幅相特性分析評估光纖陀螺平臺的低頻振動特性。試驗結果表明,該方法克服了姿態小角度的約束與濾波帶來的相位延時問題,通用性強,可以準確評價光纖陀螺平臺的低頻角振動特性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
